NLSPN, Non-Local Spatial Propagation Network for Depth Completion
2023, Apr 04
- 논문 : https://arxiv.org/abs/2007.10042
- 사전 지식 : deformable convolution
- 이번 글에서는 대표적인
Depth Completion논문인NLSPN을 다루어 보도록 하겠습니다. 저자의 아래 영상 또한 이해하는 데 도움이 많이 되었습니다.
목차
-
Abstract
-
1. Introduction
-
2. Related Work
-
3. Non-Local Spatial Propagation
-
4. Confidence-Incorporated Affinity Learning
-
5. Depth Completion Network
-
6. Experimental Results
-
7. Conclusion
-
Pytorch 코드
Abstract
- 본 논문은 성능 측면에서 강건한
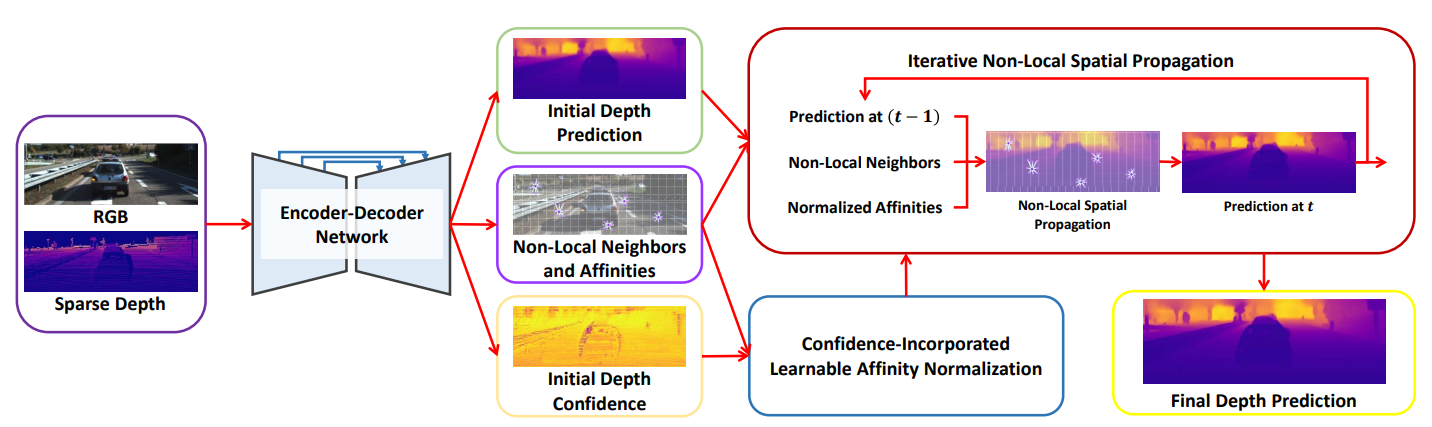
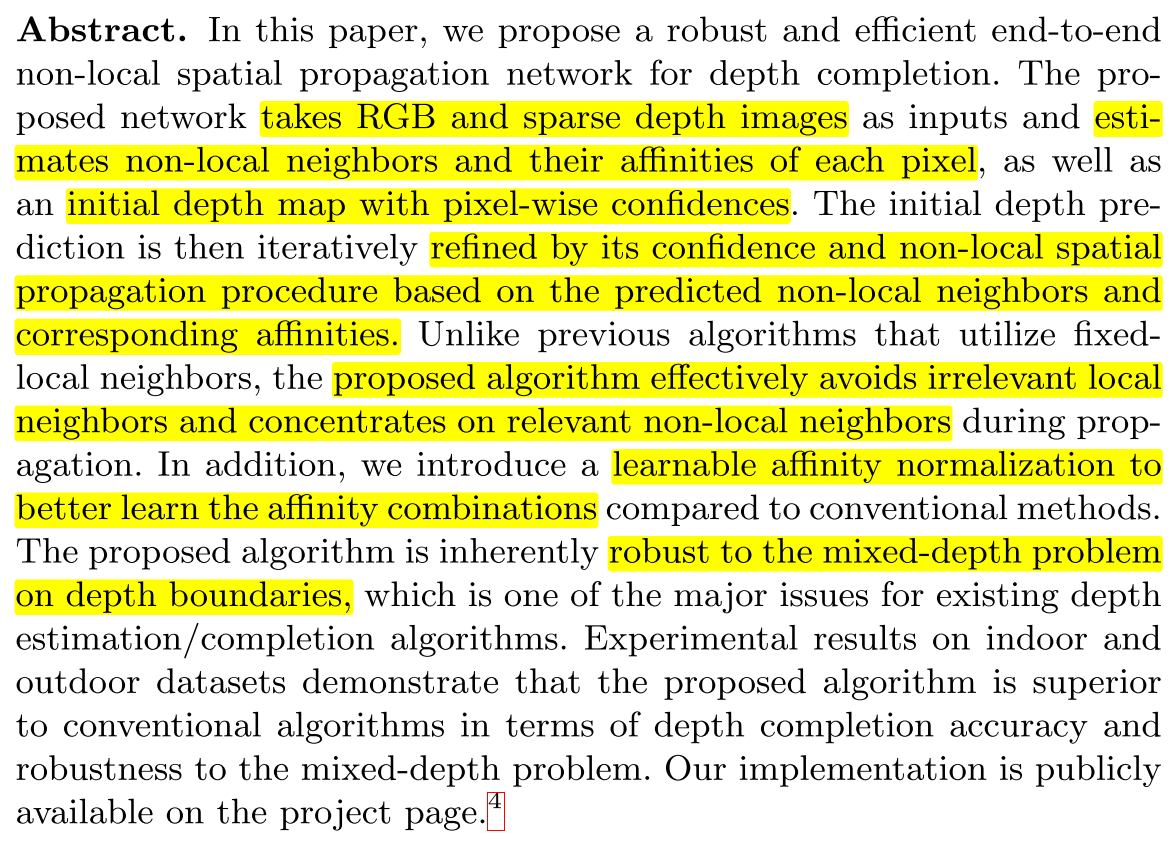
depth completion방법론을 제안합니다.depth completion은RGB 이미지와sparse depthmap을 입력으로 받아서dense depthmap을 예측하는 문제입니다. NLSPN이 예측하는 값들은Non-Local Neighbors and Affinities,Initial Depth Prediction,Initional Depth Confidence이며 이 개념들에 대하여 본 글에서 알아볼 예정입니다. 이 3가지 값을 이용하여NLSPN은 depth를 주변 픽셀로 전파하는propagation작업 과정에서 depth propagation에 무관한local neighbor를 피하고non-local neighbor이지만 depth propagation에 관련되어 있는 영역에 집중할 수 있도록 합니다. 이 부분이NLSPN의 핵심입니다. 추가적으로learnable affinity normalization개념 또한 도입하여 이전 논문들의 방법에 비해 좀 더 강건한depth completion을 해냅니다.
1. Introduction
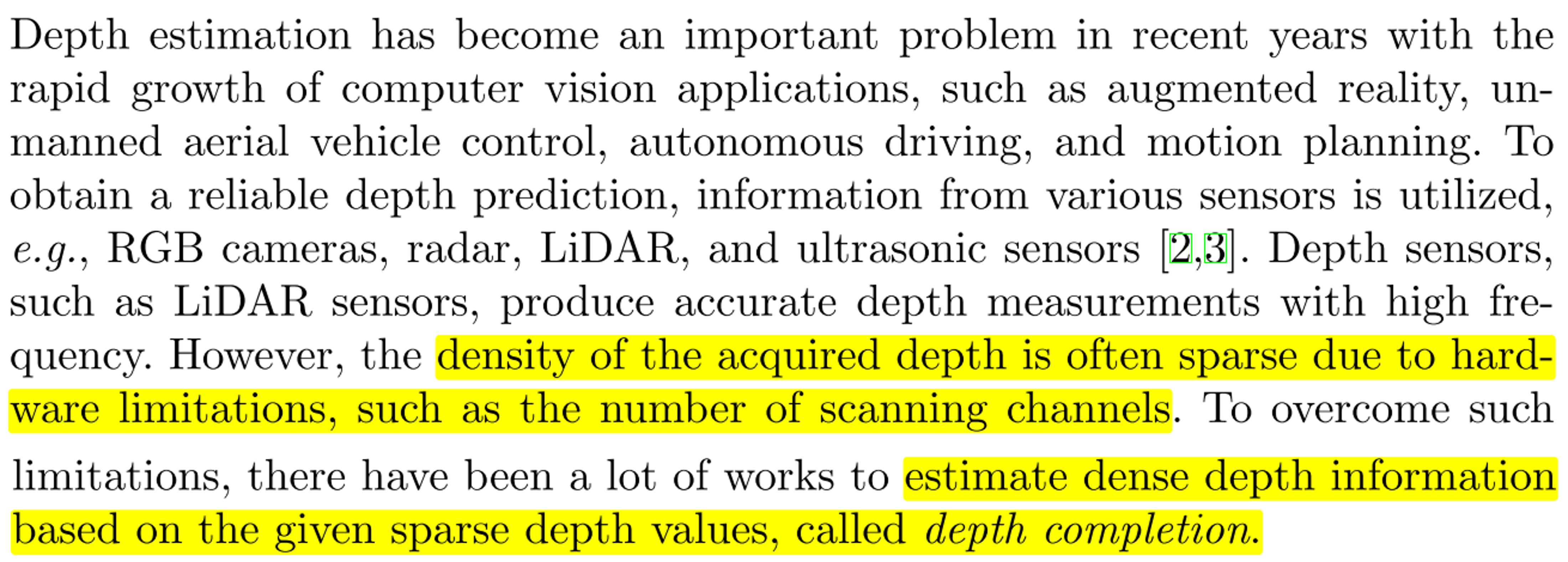
depth completion은RGB 이미지와sparse depthmap이 있을 때,sparse depthmap을dense depthmap으로 생성하는 태스크를 의미합니다. 이와 같은 태스크를 수행하는 이유는lidar의 하드웨어 한계로lidar의 해상도가 이미지의 해상도 만큼 높지 않기 때문에sparse depthmap의 형태로 데이터를 취득할 수 밖에 없습니다.- 이러한 문제를 개선하기 위하여
RGB 이미지와sparse depthmap이 주어졌을 때,dense depthmap을 예측하는 문제를depth completion으로 정의 하였고 이번 논문에서는 이 태스크에서 의미 있는 결과를 도출한 방법을 살펴볼 예정입니다.

- 이전에 사용하였던
depth completion방법은 단순히sparse depthmap을 이용하는 방법이었으나 이와 같은 방법은blurry나mixed-depth와 같은artifact문제가 발생하였습니다. 따라서 최근에 사용하는 방법과 같이RGB 이미지를 이용하여dense depth를 어떻게 생성해야 할 지 가이드를 주는 방법이 주류로 사용되고 있습니다.
- 따라서
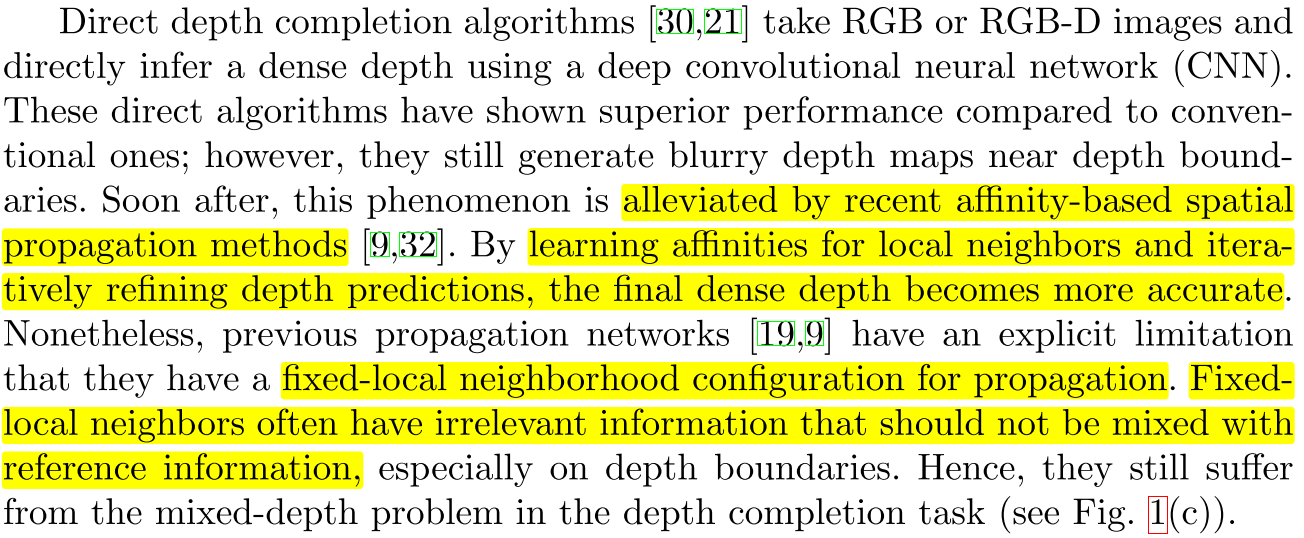
RGB또는RGB-D이미지를 이용하여 딥러닝 모델을 이용하여depth completion을 하는 방법을 사용하여 성능 개선을 하였지만 이 방법의 경우 depth가 변화가 심한 경계 부분에서 실제 depth와 같이 급격하게 변하지 않고blur해지는 문제가 발생하게 됩니다. - 이 문제는 어떤 픽셀이 그 픽셀의 주변 픽셀과 얼만큼
affinity가 있는 지 학습하는 방식을 통해 개선하는 시도들이 있었고affinity학습과 반복(iteration)을 통한depth prediction refinement를 통해 앞에서 제기한blur문제를 포함하여 전체적인 성능 개선을 진행해 왔습니다. - 또한
RGB또는RGB-D이미지 기반의depth completion에서는mixed-depth문제가 발생하였습니다. 그 이유는 기존의 방식이convolution기반의fixed-local neighborhood를 참조하는depth propagation방식이었는데convolution연산은 직사각형 형태의fixed-local neighborhood만 참조하여depth를 주변 픽셀로 전파할 수 밖에 없기 때문에 원하지 않는depth가 섞일 수 있기 때문입니다.
- 이번 글에서 다룰
NLSPN (Non-Local Spatial Propagation Network)은 각 픽셀에서depth propagation을 위하여 참조할non-local neighbor를 어떻게 예측하여 선정할 지에 대한 방법과 선정된 픽셀에 대하여sparially-varing affinities를 통해depth정보를 어떻게 모아서propagation할 지에 대한 방법론을 제시합니다. depth propagation방식을fixed local→non local방식으로 변경함에 따라mixed-depth문제에 강건해 질 수 있었으며 이 때 사용되는affinity의learnable affinity normalization방법과initial dense depth의confidence를 사용하는 방법을 통해 추가적인 성능 개선을 할 수 있었습니다. 이 방법에 대해서는 본론에서 알아보도록 하겠습니다.