AutoEncoder의 모든것 (1. Revisit Deep Neural Network)
2019, Feb 24
- 이 글은 오토인코더의 모든것 강의를 보고 요약한 글입니다.
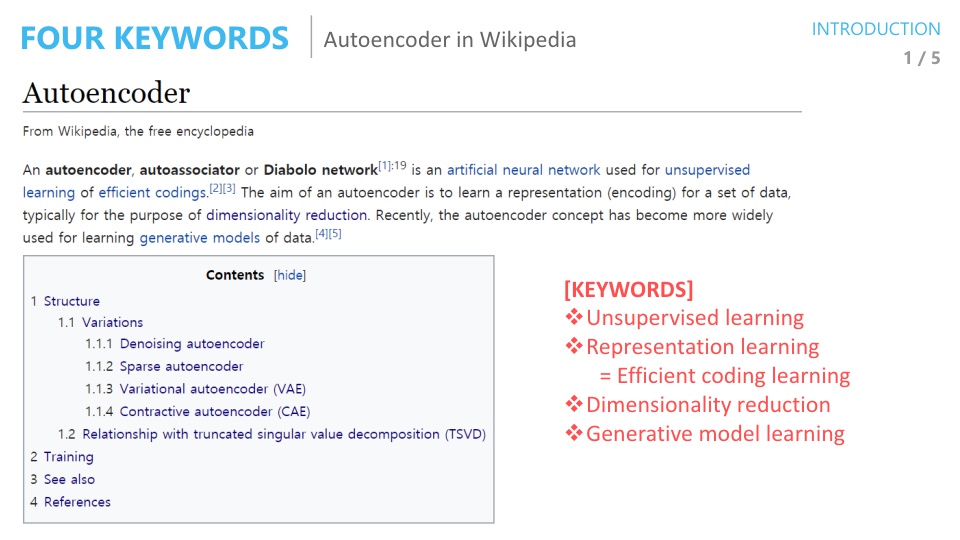
- AutoEncoder와 관련된 키워드는 다음과 같습니다.
- Unsupervised Learning
- Representation learning = Efficient coding learning
- Dimensionality reduction
- Generative model learning
- 여기서 가장 많이 알려진 키워드가
Dimensionality reduction이고 많은 사람들이 이 용도로 AutoEncoder를 사용하고 있습니다. Dimensionality reduction을 하기 위해서는 AutoEncoder가 feature를 잘 추출해야 하는데 이 의미가Representation learning과 연관되어 있습니다.
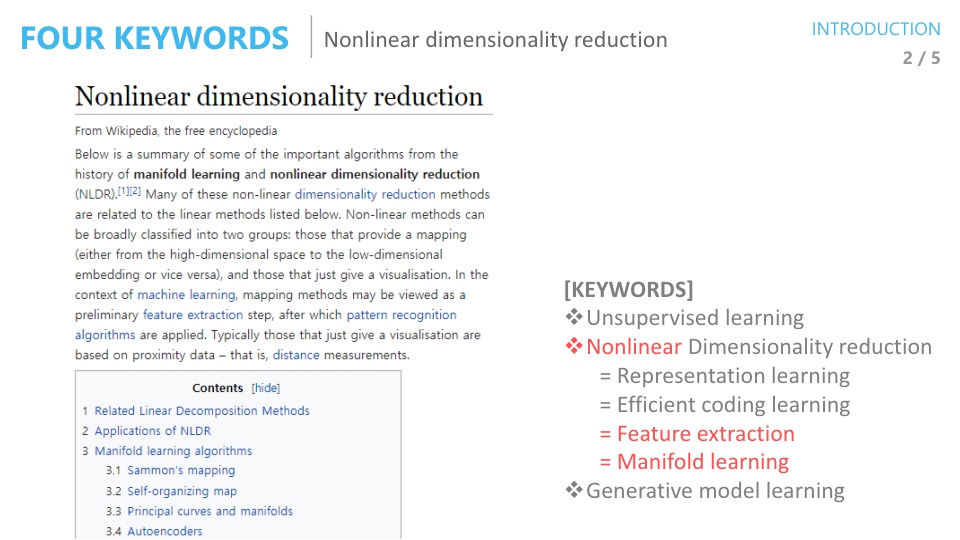
Nonlinear Dimensionality Reduction과 같은 용도로 사용되는 키워드는 위와 같습니다. 앞에서 언급한Feature Extraction과Manifold learning은 같은 의미로 많이 사용되는 용어입니다.
- 이번 글에서 살펴볼
AutoEncoder은 어떤 목적의 알고리즘으로 분류되는 지 먼저 살펴보겠습니다.
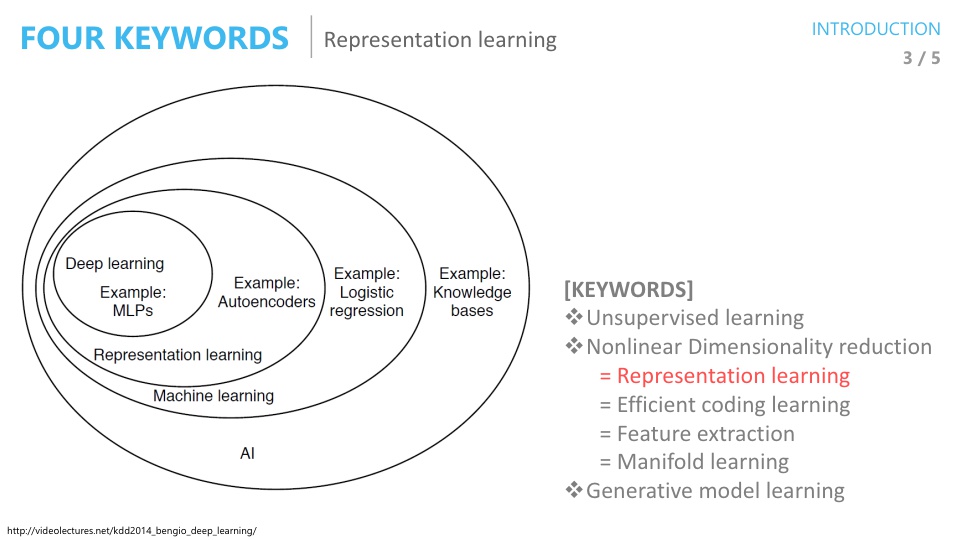
- 위 표는 벤지오 교수님의 기술분류표이고
AutoEncoder는Representation Learning으로 분류되어 있습니다.
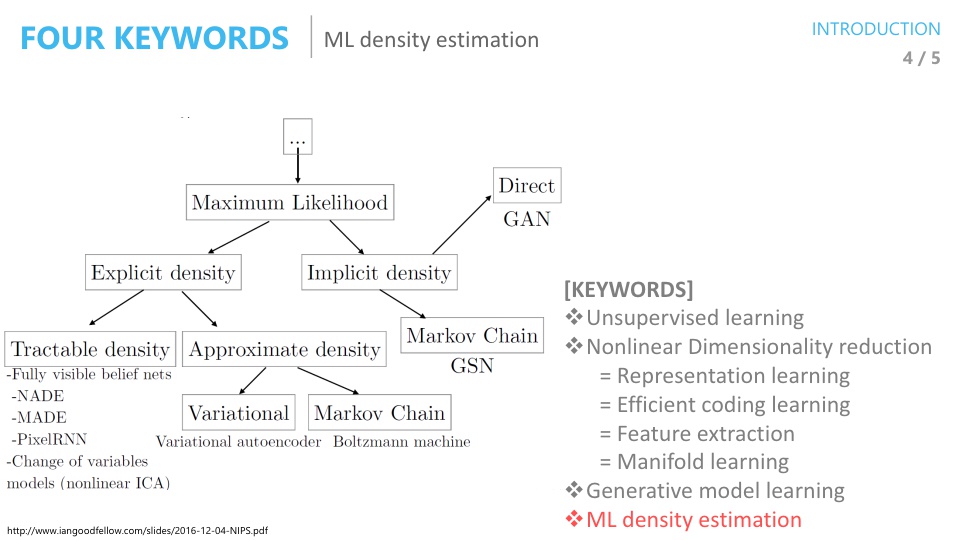
- 이안 굿펠로우의 기술분류표를 보면 앞으로 살펴 볼
Variational Autoencoder는Maximum Likelihood와 연관이 되어 있습니다. - 따라서 Maximum Likelihood에 대해서도 알아 볼 예정입니다.
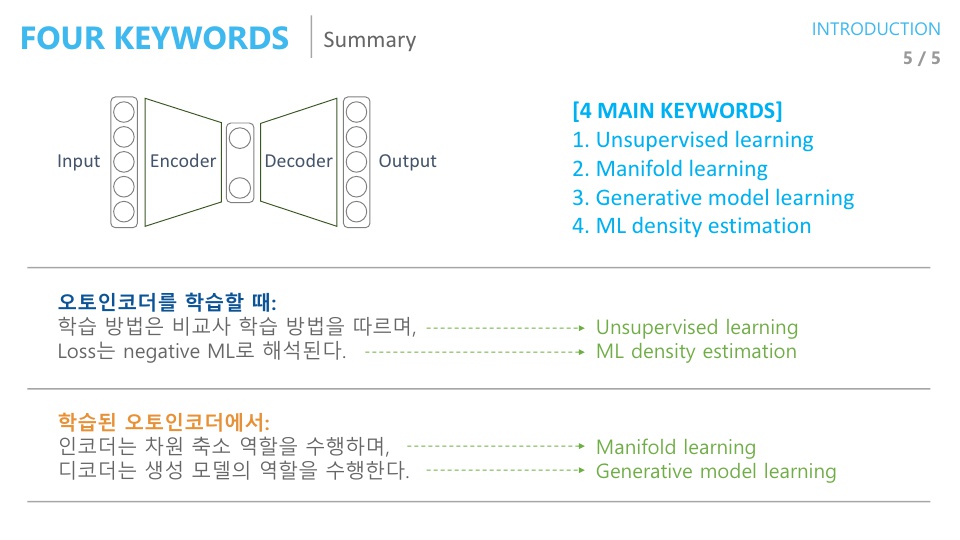
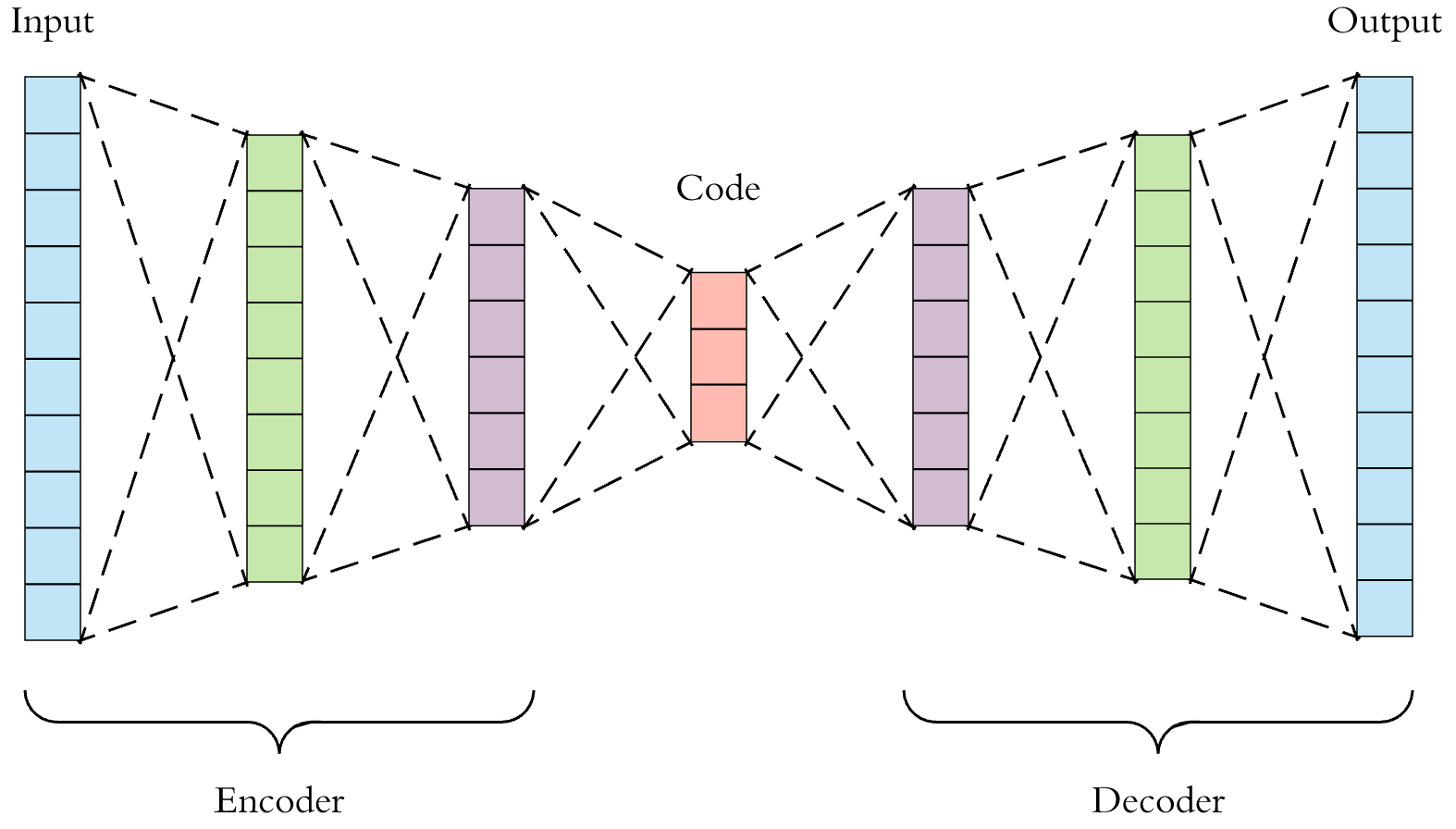
- AE(AutoEncoder)는 입력과 출력이 같은 동일한 구조를 가지고 있으며 그러한 이유로 Auto Encoder라고 불립니다.
- 이 때 관계된 키워드가 앞에서 언급한 바와 같이 크게 4가지가 있습니다.
- 오토인코더를 학습할 때,
Unsupervised learning: 학습 방식에 해당합니다.ML density estimation:Loss function이Negative Maximum Likelihood로 해석을 해서 Loss를 Minimize 하면Maximum Likelihood가 됩니다.
- 학습된 오토인코더에서
Manifold learning: 인코더는 차원 축소 역할을 수행하고 (일반적으로 가운데 차원은 입력 보다 작음) 이것을 Manifold learning 이라고 합니다.Generative model learning: manifold learning을 한 결과를 다시 입력 차원과 똑같이 복원을 하는 데 이것을 Generative model 이라고 합니다.
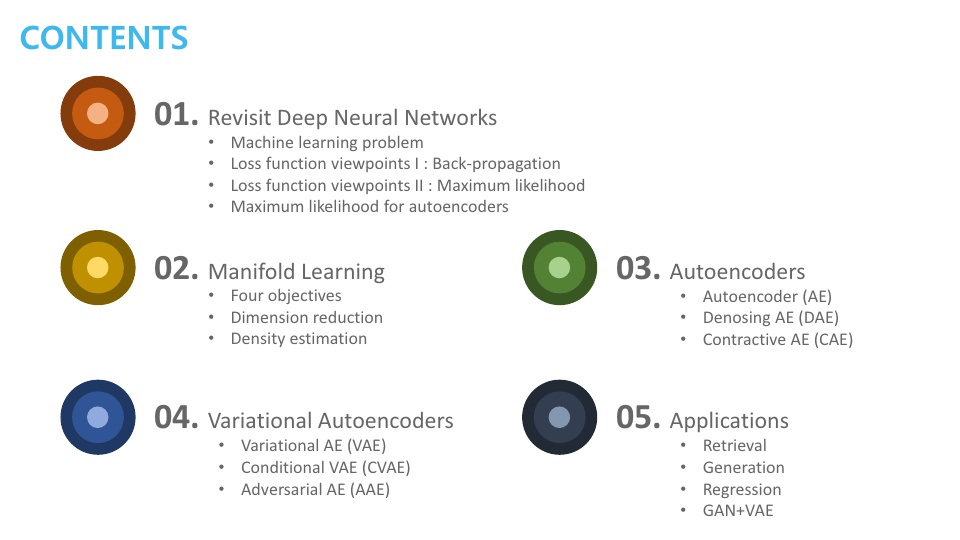
- 앞으로 다룰 내용은 위의 슬라이드에 있는 구성으로 진행할 것입니다.
- 챕터 1, 2는 Variational AutoEncoder(VAE)를 이해하기 위한
사전지식으로 구성되어 있습니다.- 챕터1은 AE가 Maximum Likelihood(ML)과 관련이 있음을 설명합니다.
- 챕터2는 AE가 Manifold learning에 많이 쓰이기 때문에 Manifold learning에 대한 정의에 대하여 알아보도록 하겠습니다.
- 챕터 3에서는
기본적인 AE에 대하여 다루어 보도록 하겠습니다. - 챕터 4에서는
VAE에 대하여 다루어 보도록 하겠습니다. - 챕터 5에서는
AE를 응용하는 방법에 대하여 알아보도록 하겠습니다.
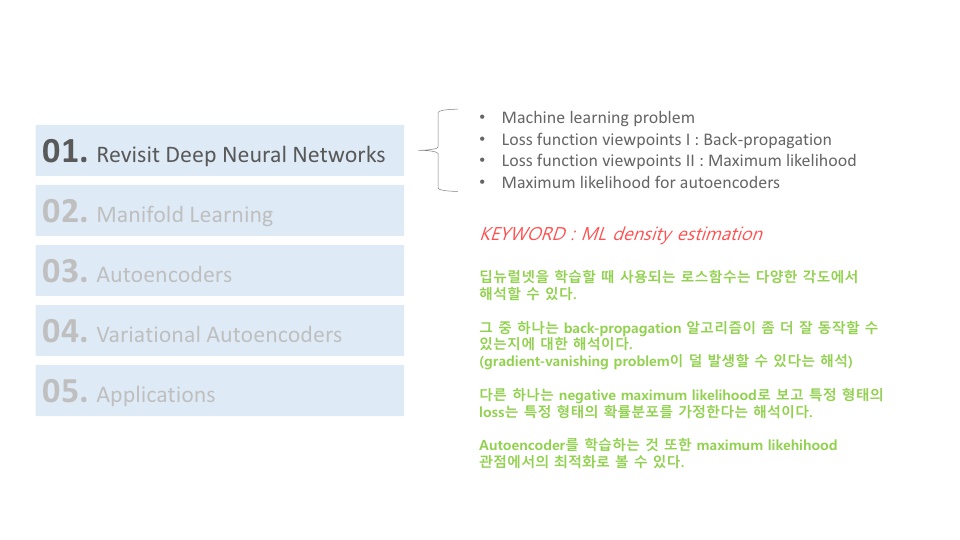
- 챕터1을 시작해 보겠습니다. 챕터1에서는 AE는 Maximum Likelihood하는 작업인 것을 이해하면 되겠습니다.
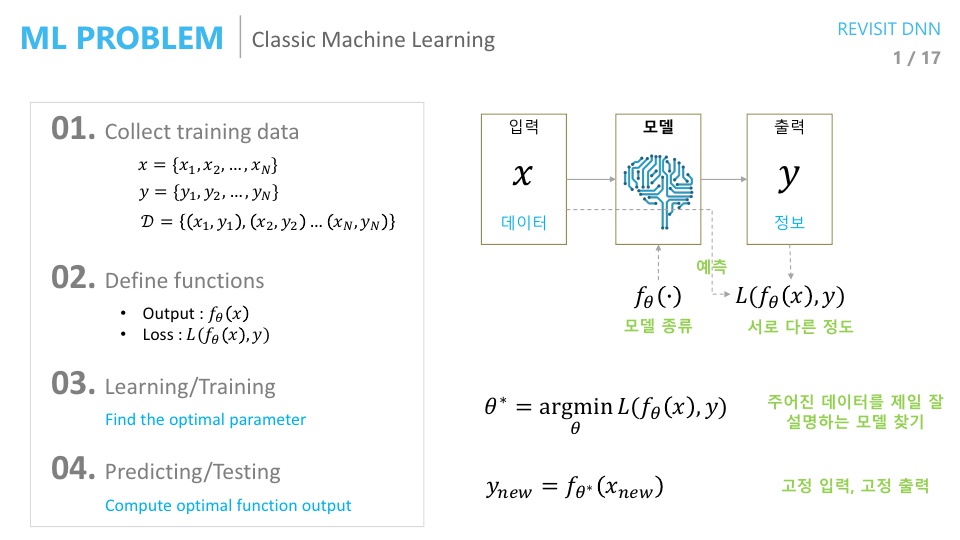
- 먼저 전통적인 머신러닝 방법부터 살펴보도록 하겠습니다.
- 머신러닝을 할 때에는 주어진 데이터가 있으면 그 데이터에서 필요한 정보를 뽑아내야 합니다. (얼굴이 있으면 이것은 얼굴이다? 또는 누구의 얼굴이다와 같은 추상적인 정보)
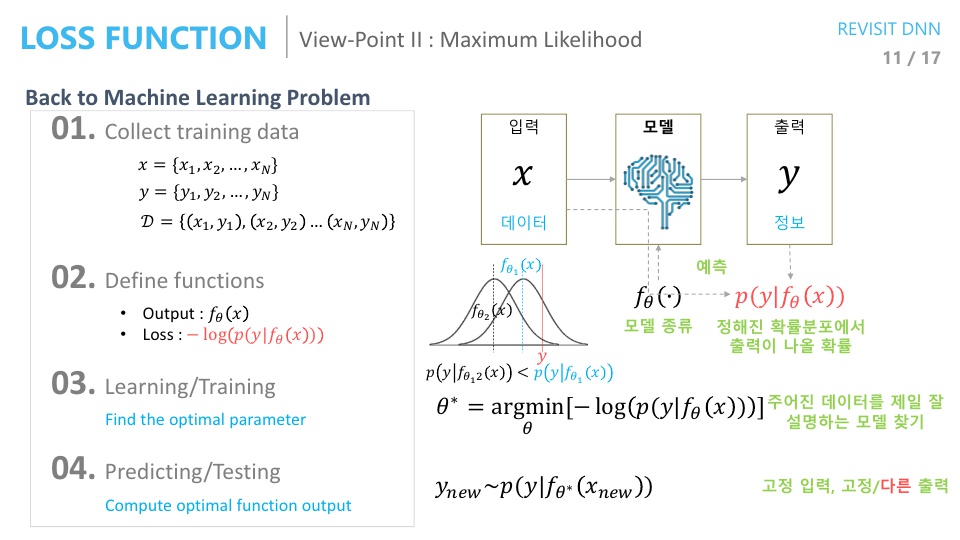
- ① 따라서 먼저 학습을 하기 위한
데이터를 먼저 모아야 합니다. 특히 위의 슬라이드를 보면 \(x, y\) 데이터를 모아서 데이터 셋 \(D\)를 구성하게 됩니다. 이 데이터 구성은 supervised learning을 위한 방법입니다. - ② 입력 데이터를 마련하였다면 그 다음은 학습할
모델을 준비해야 합니다. 즉, 주어진 데이터에서 추상적인 답을 뽑아낼 알고리즘을 정의해야 합니다. - ③ 모델을 정의한 다음에는 모델을 결정지을
파라미터를 학습하여 결정해야 합니다. 이 때 학습을 하기 위해Loss function을 정의해야 합니다. 정의한Loss function을 이용하여 모든 데이터셋에 걸쳐서 예측값과 정답간의 차이를 가장 좁혀주는 파라미터를 찾습니다. - ④ 학습이 완료되면 예측을 하고 성능을 테스트 합니다.
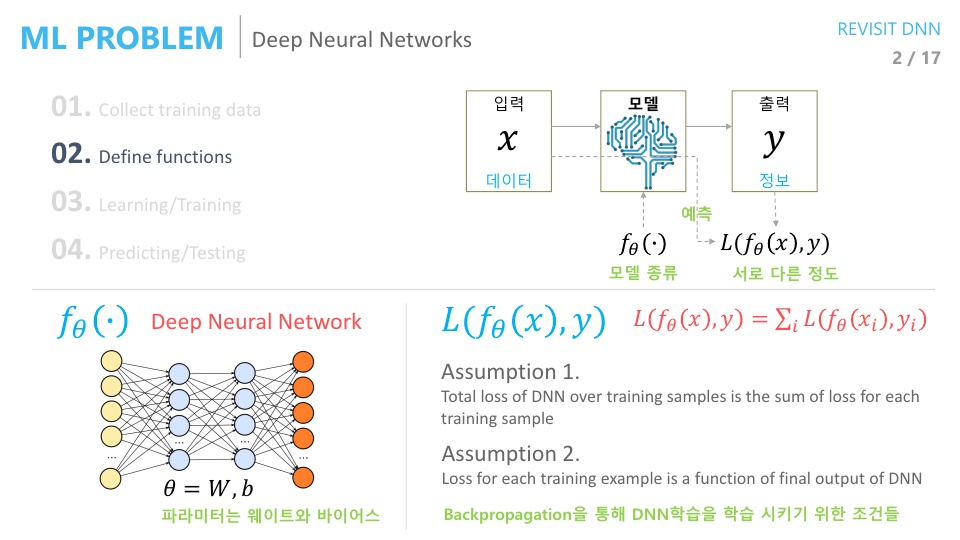
- 딥러닝에서는 위에서 설명한 머신러닝 방법에서 모델 설정 방법이 조금 바뀌게 됩니다.
- 딥러닝에서는 모델을
Deep Neural Network를 사용하는것으로 정의합니다. - 그리고 딥러닝에서는
Loss function을 정의할 때 주로,Mean Squared Error,Cross Entropy등을 사용합니다. 왜냐하면Back-propagation을 하기 위해서 입니다. Back-propagation을 통해서 딥 뉴럴 네트워크를 학습해야 하고 위에서 언급한 2가지Loss가 효율적으로 사용될 수 있습니다.- 딥러닝에서는 뉴럴네트워크 구조로 인하여
Back-propagation을 통한 학습을 해야 하는데, 이 때 필요한 2가지 조건이 있습니다. 이 조건을 만족하는Loss가MSE와CE입니다.- 조건 1 : 전체 데이터셋에 대한 Loss는 각각의 데이터의 Loss의
합과 같다. - 조건 2 : Loss를 구성할 때,
네트워크의 출력값만을 사용한다.
- 조건 1 : 전체 데이터셋에 대한 Loss는 각각의 데이터의 Loss의
- 전체 학습 데이터 셋에 대한
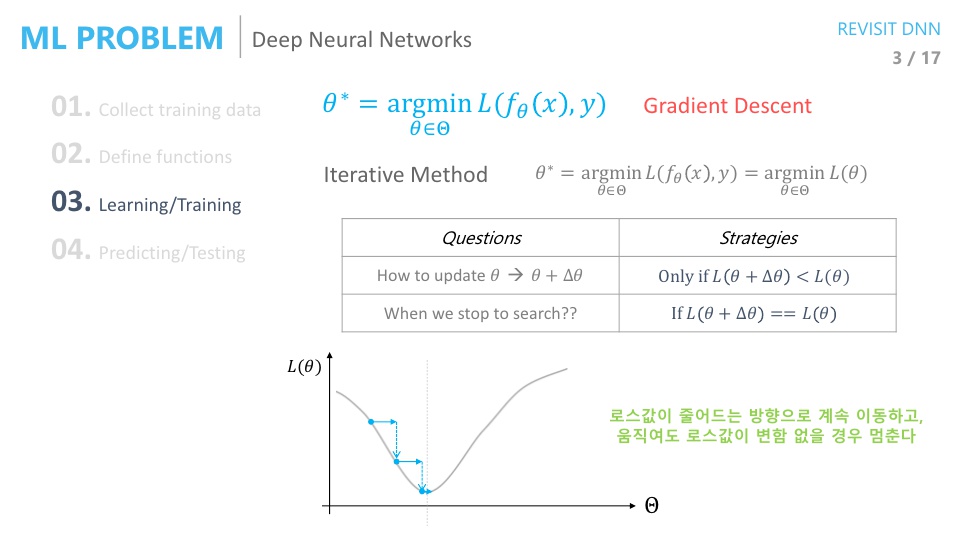
Loss를 최소화 하는 파라미터를 찾는데 주로 사용하는 방법은Gradient Descent입니다. Gradient Descent(GD)는 기본적으로 iterative 한 방식입니다.Closed form이 아니므로 한번에 솔루션을 찾지는 못하고 여러번 시도 끝에 솔루션을 찾아가는 구조입니다.- Iterative method에는 2가지가 결정되어야 합니다.
- ① 어떻게 파라미터를 업데이트 할 것인가 ?
GD에서는Loss값이 줄어들기만 하면 업데이트를 하는 전략을 취합니다. - ② 언제 업데이트를 멈출 것인가?
GD에서는 파라미터를 아무리 바꾸더라도Loss가 줄어들지 않으면 업데이트를 멈춘다는 전략을 취합니다.
- ① 어떻게 파라미터를 업데이트 할 것인가 ?
- 그런데 한가지 문제점이 있습니다. 업데이트 해야 할 파라미터 \(\theta\)의 차원이 굉장히 큰 경우에는 어떻게 \(\theta\)를 변경해야 할까요?
- 즉, 어떤 방법으로 파라미터를 업데이트 해야 할 지에 대한 전략이 필요합니다.
- 앞의 전략(Loss가 줄어드는 방향으로 파라미터 업데이트)을 만족시키면서 파라미터를 변경하는 방법에 대하여 알아보겠습니다.
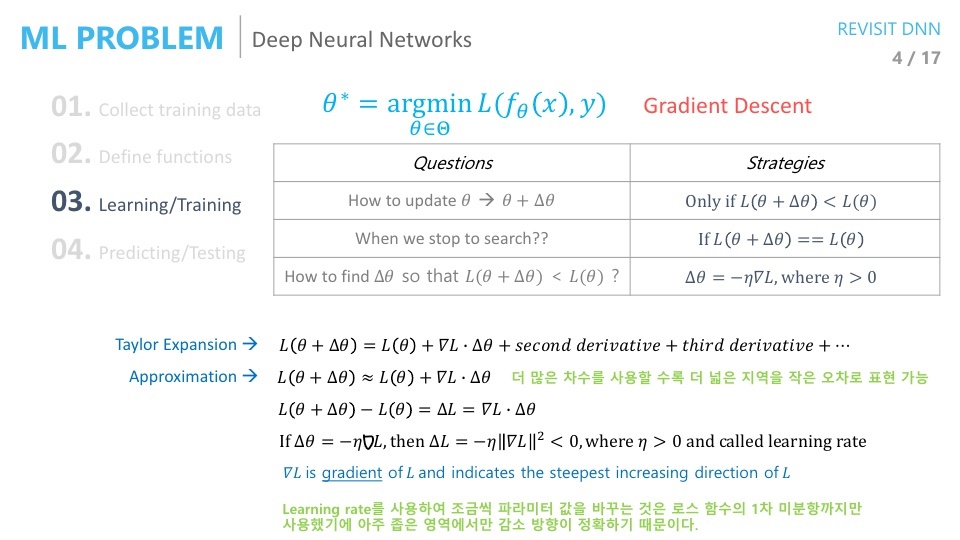
- 머신러닝, 딥러닝에서 사용하는 파라미터 업데이트 방법의 기본은
taylor expansion에 기초를 두고 있습니다.
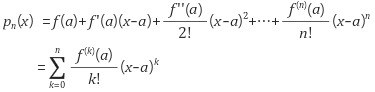
- taylor expasion의 정의는 위와 같습니다.
- 간단히 말하면 변경 전 정의역의 치역값 \(f(a)\) 에 정의역의 변경값과 1차 미분값의 곱 \(f'(a)(x-a)\) , 정의역의 변경값과 2차미분값의 곱 \(f''(a)/2! (x-a)^{2}\) , … 을 모두 더하면 변경 후 정의역의 치역값 \(p_{n}(x)\) 이 된다는 것입니다.
- 머신러닝에서는 이 taylor expansion의 방법에서 1차 미분값까지만 사용해서 근사값을 추정하는 방식을 사용합니다.
- 즉, \(\theta\) 를 바꾸었을 때의 Loss 값은 현재 Loss 값 + 그래디언트 * \(\theta\)의 변경량이 됩니다.
- taylor expansion에서는 어떤 값( \(x=a\) )을 기준으로 미분하였으므로 \(x=a\)에서 다항근사를 하는 것이지만 그 주변까지도 어느 정도는 근사가 됩니다.
- 이 근사가 되는 범위는 몇 차수 미분 까지 사용하는 것과 관계가 있습니다. 더 많은 차수를 사용할수록 더 넓은 지역을 작은 오차로 표현이 가능합니다.
- 예를 들면 sin 함수에서 기울기가 1인 부분이 있습니다. 그 지점에서만 국소적으로 바라봤을 때는 sin(x) 함수와 y=x 함수가 똑같아 보입니다. 하지만 그 지점을 조금 더 벗어나면 sin(x)와 y=x값이 달라보이게 됩니다.
- 만약 근사값을 사용할 때, 1차 미분이 아니라 2차, 3차, … 미분까지 사용한다면 y=x 함수식 보다 조금 더 복잡하지만 그 부근에서 y=x 일 때 보다 좀 더 넓은 범위로 sin(x)와 똑같아 보이는 근사식을 구할 수 있습니다.
- 그러면 1차 미분값 까지만 사용한 근사식을 이용하여 Loss값의 변화량을 살펴보면 위 슬라이드와 같이 \(\triangle L \approx \nabla L * \triangle \theta\)가 됩니다. 참고로 \(\triangle\) 은 변화량(델타)을 뜻하고 \(\nabla\)는 그래디언트(미분값)을 뜻합니다.
- 만약 \(\triangle \theta = -\eta\nabla L\) 라고 한다면, \(\triangle L = -\eta \Vert \nabla L \Vert < 0\) 이 됩니다.
- 이 때, \(\eta\)가 양수이고 흔히 아는 learning rate를 뜻합니다.
- 위 식에 의해서 \(\triangle L\)은 항상 음수가 되로 Loss는 줄어드는 방향으로 업데이트가 됩니다.
- 그러면 \(\triangle \theta = -\eta\nabla L\) 라는 가정은 왜 두었을까요? 앞에서 설명한것과 같이 Loss 값을 항상 줄이는 방향으로 만들어 학습이 되도록 만들기 위해서입니다.
- 즉 \(\triangle \theta = -\nabla L\)이 되도록 하면 항상 Loss는 줄어들게 되고 여기에 \(\eta\) 값을 곱해주어서 학습이 잘 될수 있도록 \(\triangle \theta\) 값의 변경량을 조절해 줍니다.
- 이 때 Learning rate \(\eta\)를 작은 값을 사용하는 이유는 파라미터 값을 조금씩 바꾸기 위함입니다.
- 파라미터 값을 조금씩 바꿔야 하는 이유는 Loss 함수에서 taylor expasion의 1차 미분항까지만 사용했기 때문에 아주 좁은 영역에서만 감소 방향이 정확하기 때문입니다. 즉, 파라미터 변경량이 크면 근사를 잘못할 수 있기 때문에 learning rate를 이용하여 변경량을 적당히 줄여줍니다. learning rate가 너무 커서 Loss가 발산하는 경우가 바로 approximation을 잘못한 경우입니다.
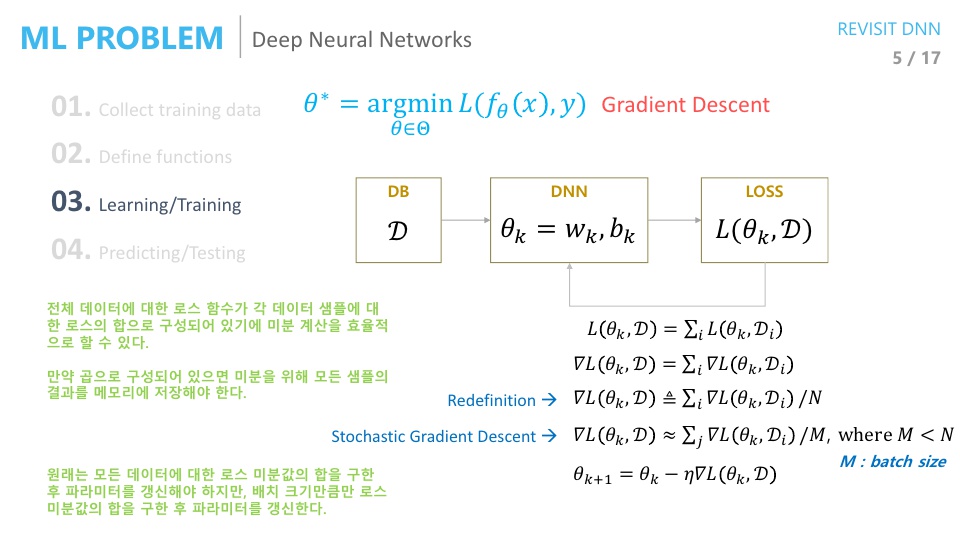
- 그러면 전체 과정을 한번 보겠습니다. 먼저 \(\mathcal D\)라는 Training DB가 있고 \(\theta_{k}\) 라는 현재 파라미터가 있다고 가정해 봅시다.
- 이 때, Loss 함수를 거치고 \(\theta\)가 업데이트 되는 과정을 한번 살펴보겠습니다.
- 먼저 \(L(\theta_{k}, \mathcal D) = \sum_{i}L(\theta_{k}, \mathcal D_{i})\) 식의 뜻은 모든 training DB에 대한 loss function은 각 sample 별 loss function의 합과 같다는 뜻입니다.
- 그리고 위 식의 양변에 gradient를 취해주어 \(\nabla L(\theta_{k}, \mathcal D) = \sum_{i} \nabla L(\theta_{k}, \mathcal D_{i})\) 로 식을 만들어 줍니다.
- 이 때 우변을 \(N\) (DB의 크기) 으로 나누어 준다면 샘플 별 평균 Loss 크기값을 계산하게 되고 M(미니 배치의 크기)으로 나누게 되면 미니 배치 별 평균 Loss를 구할 수 있습니다.
- 미니 배치를 이용하는 것이 전체 데이터를 이용하는 것 보다 학습 속도에 장점이 있기 때문에 미니 배치를 사용하는 것이 좋습니다. 전체 DB를 이용해서 학습하게 되면 연산량이 상당히 커지고 모든 DB가 다 계산되어야 한번 업데이트 되기 때문에 학습 속도 또한 느려집니다.
- 이 때, 각 샘플별 Loss의 평균과 미니 배치 별 Loss 의 평균이 유사할 것이라 생각하고 미니 배치 별 Loss로 파라미터를 업데이트 해줍니다.
- 1번 업데이트 되는 것을
step이라고 하고 모든 training DB를 한번 다 훑는 것을epoch이라고 하면 1 epoch 당 1 step의 업데이트가 발생하는데 미니 배치를 사용하면 1epoch 당 N/M step의 업데이트가 발생하게 됩니다.
- 우리가 학습해야 할 네트워크의 구조가 딥 뉴럴 네트워크이기 때문에 학습해야 할 파라미터가 weight와 bias로 구성되어 있습니다.
- 그리고 이 weight와 bias는 layer 별로 존재하게 됩니다. 현대 딥 뉴럴 네트워크에서 사용하는 layer의 수는 엄청나게 많기 때문에 파라미터의 수 또한 엄청나게 많아집니다.
- 이 때 중요한 것은 엄청나게 많은 파라미터들을 업데이트 하기 위하여 Loss function을 미분을 해야 합니다.
- 즉, 각 layer 별 weight와 bias에 대하여 Loss function을 미분을 하여 그 값만큼 파라미터를 업데이트 하는 과정이 필요합니다.
- 이 과정이 엄청나게 복잡하기 때문에 딥 뉴럴 네트워크에 한번 암흑기가 왔지만
backpropagation을 통하여 극복해 내었습니다.
- 그러면
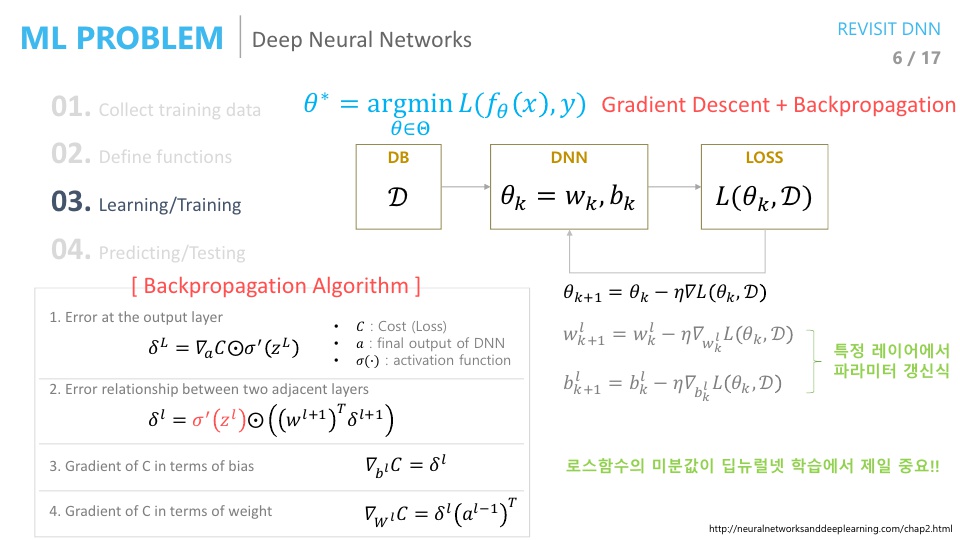
backpropagation에 대하여 알아보겠습니다. - backpropagation 알고리즘은
output layer에서 부터 먼저error signal을 구합니다. - output layer의 error signal은 cost를 네트워크의 출력값으로 미분을 합니다.
- 그리고 \(⊙\)는 element-wise 곱을 뜻합니다. 그러면 output layer의 error signal과 activation function의 미분값을 element-wise 곱을 하면 output layer의 error를 구할 수 있습니다.
- 그리고 그 앞 layer와의 관계를 보고 \(\delta^{l+1}\)을 이용하여 \(\delta^{l}\) 을 계속 구해나아갈 수 있습니다. 이 때, \(\delta^{l+1}\) 을 이용하여 그 앞단의 \(\delta^{l}\)을 구하는 과정이므로 backpropagation이라고 부르게 됩니다.
- 위 과정을 통하여 각 layer에 대한 error signal을 구하였습니다. 우리가 궁금한 것은 각 layer별 bias와 weight에 대한 error signal 입니다.
- 이 때, bias에 대한 error signal은 각 layer에 대한 error signal과 같고 weight에 대한 error signal은 layer의 입력으로 들어오는 값을 곱해주면 됩니다.
- 이 구하는 과정이 dynamic programming기법으로 결과 값이 계속 누적되어 효율적으로 계산되므로 빠르게 weight와 bias에 대한 미분값을 구할 수 있습니다.
- 그러면 backpropagation에서 loss function으로 주로 사용하는 Mean Square Error와 Cross Entropy에 대하여 알아보려고 합니다.
- 앞에서 설명하였듯이 loss function으로 두 가지를 사용하는 이유는 backpropagation알고리즘에 대한 다음 두 가지 가정을 만족하는 함수 이기 때문이었습니다.
- 조건1 : 전체 데이터셋에 대한 Loss는 각각의 데이터의 Loss의 합과 같다.
- 조건2 : Loss를 구성할 때, 네트워크의 출력값 만을 사용한다.
- 그러면 어떨 때, Mean Square Error를 쓰고 어떨 때에는 Cross Entropy를 쓰는 것이 좋은지 한번 살펴보도록 하겠습니다.
- 이 비교를 하기 위해서는 2가지 관점에서 비교를 할 수 있습니다.
- 1번째 관점 :
Backpropagation - 2번째 관점 :
Maximum Likelihood
- 1번째 관점 :
- 결과적으로는 Backpropagation 관점에서는
Cross Entropy가 좋습니다. - 두번째로 Maximum Likelihood 관점에서 만약 출력 값이
Continuous한 값이라면Mean Square Error를 쓰는 것이 좋고Discrrete한 값이면Cross Entropy를 쓰는 것이 낫다고 할 수 있습니다. - 그러면 첫번째로 Backpropagation이 잘 동작하는 관점에서 살펴보도록 하겠습니다.
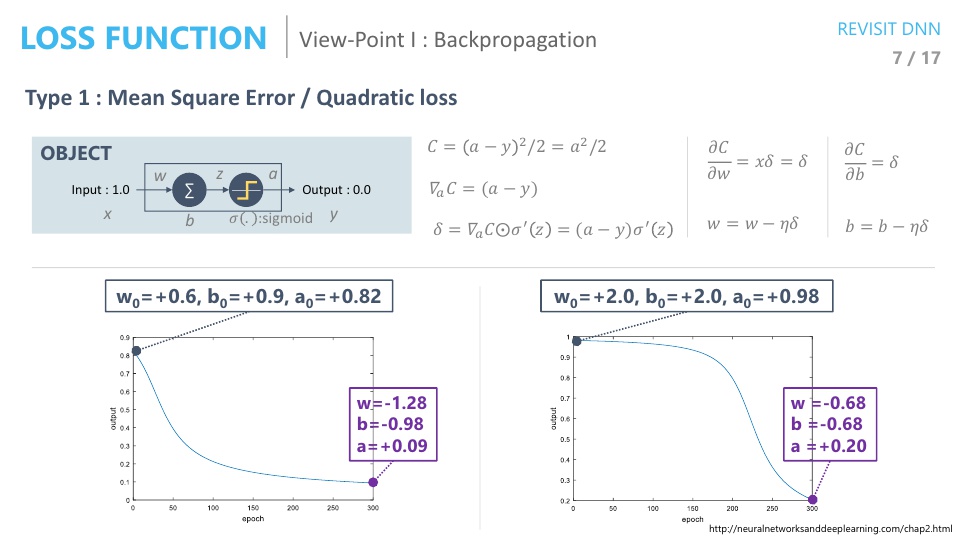
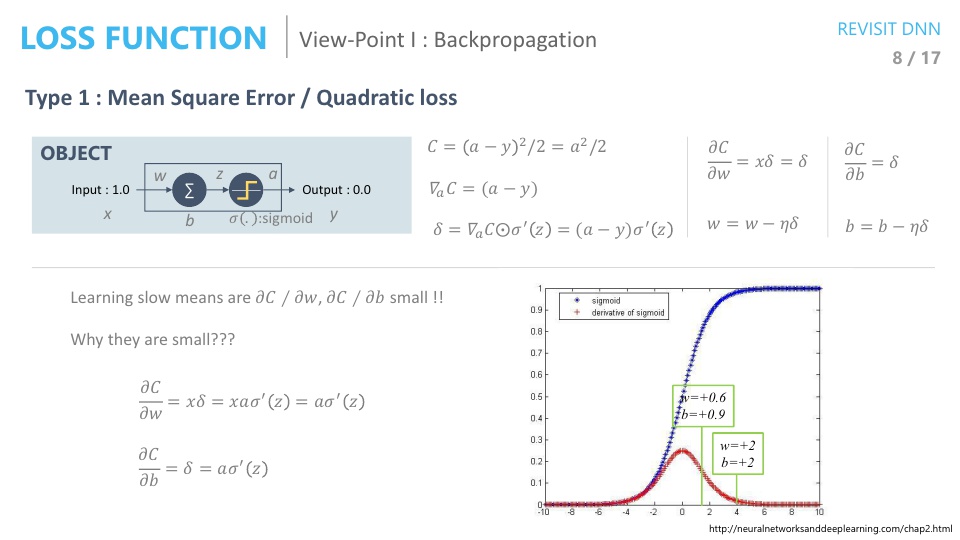
- 위 슬라이드와 같이 아주 간단한 뉴럴 네트워크를 한번 살펴보도록 하겠습니다. 입력이 1이면 출력이 0이고 노드는 딱 1개 입니다.
- 입력이 들어가면 w를 곱하고 b를 더하고 activation을 거칠 때, 시그모이드를 거칩니다.
- 위 조건으로 backpropagation 알고리즘을 사용해 보겠습니다.
- Loss function으로 Mean Square Error를 사용한다는 것은 입력과 출력의 차이의 제곱으로 하는 것을 뜻합니다.
- 즉, \(C = (a - y)^{2} / 2 = a^{2} / 2\)가 됩니다. 여기서 \(a\)는 네트워크의 출력입니다.
- backpropagation을 하기 위하여 그 다음 과정은 네트워크의 출력값으로 미분을 합니다.
- 즉, \(\nabla_{a} C = (a - y)\)가 됩니다.
- 그 다음으로 이전 입력값인 activation을 미분을 해서 element-wise 곱합니다.
- 즉, \(\delta = \nabla_{a} C ⊙ \sigma'(z) = (a - y)\sigma'(z)\)이 됩니다.
- 그 다음으로 \(w\)에 대하여 미분을 해줍니다. 앞의 과정까지 포함해서 식으로 표현하면 다음과 같습니다.
- 즉, \(\frac{\partial C}{\partial w} = x \delta = \delta\) 왜냐하면 입력값 \(x\)가 1이기 때문입니다.
- 그러면 이 값으로 최종 weight를 업데이트 해주면 \(w = w - \eta \delta\)가 됩니다.
- bias에 대해서도 위와 같은 과정을 거치면 \(\frac{\partial C}{\partial b} = \delta\)가 되어 \(b = b - \eta \delta\)가 됩니다.
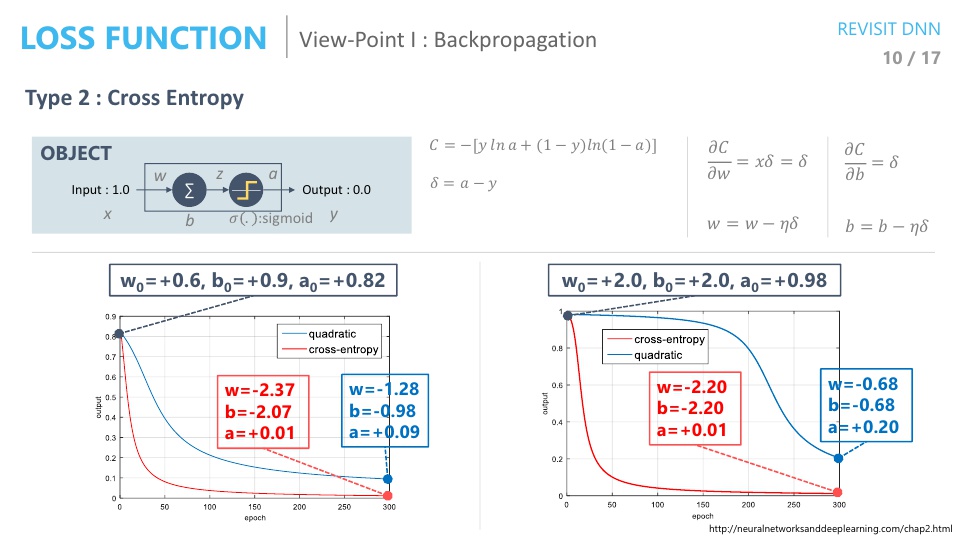
- 이제 학습에 필요한 수식이 모두 준비가 되었습니다. 그 전에 위 슬라이드의 그래프를 한번 보겠습니다.
- 위 좌, 우 그래프를 보면 초기값의 차이에 따라서 output의 차이가 있는 것을 볼 수 있습니다. 초기값이 왜 결과에 영향을 미칠까요?
- backpropagation을 보면 activation function의 미분값이 항상 들어가 있습니다.
- 학습에 차이가 있다는 것은 \(w, b\)에 대한 변화가 제대로 이루어 지지 않았다는 뜻입니다. \((\partial C / \partial w), (\partial C / \partial v)\)에 대하여 살펴보겠습니다.
- 먼저 \(\frac{\partial C}{\partial w}, \frac{\partial C}{\partial b}\) 모두 \(\sigma'(z)\)가 포함되어 있습니다.
- 여기서 \(\sigma(z), \sigma'(z)\)의 값 분포를 보면 오른쪽 그래프와 같은데, 초기값에 따라서 \(\sigma'(z)\)의 값이 0에 수렴해 버릴 수도 있습니다.
- 즉, 앞 장에서 보면 \(w = 2, b = 2\) 일 때의 결과가 안좋았었는데, 그 이유는 gradient가 0에 가까워서 변화량이 너무 작은 상태에서 시작했기 때문이었습니다.
- 앞 장의 슬라이드를 보면 \(w = 2, b = 2\)인 상태에서는 변화량이 조금씩 조금씩 있다가 어느 순간 부터 학습 되기 시작하는 그래프를 확인할 수 있습니다.
- 반면 \(w = 0.6, b = 0.9\)인 상태에서는 처음부터 gradient가 커서 변화가 잘 되었기 때문에 결과가 좋았다고 볼 수 있습니다.
- 특히, sigmoid activation 같은 경우에는 gradient의 최댓값이 1/4 이기 때문에 layer가 거듭될수록 최소 1/4 만큼씩 줄어들어서 변화량이 급격하게 줄어들어 입력층에 가까울수록 변화가 없게 됩니다.
- 이 문제가
gradient vanishing문제입니다.
- 이 문제가
- 따라서 이런 문제를 해결하기 위해
ReLuactication을 사용 합니다. \(\text{Relu} = \text{max}(0, x)\)로 음수는 모두 0으로 만드는 반면 양수는 그대로 통과 시킵니다.- 즉, 양수의 경우 gradient가 1이므로 입력층과 가까운 레이어에도 gradient가 전달될 수 있습니다.
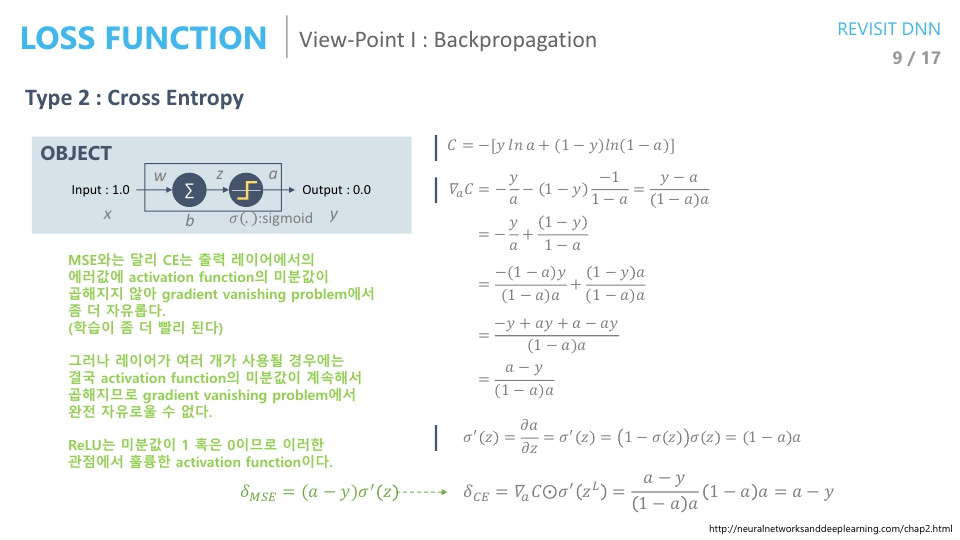
- 위 식은
Cross Entropy에 대한 gradient값을 계산하는 과정입니다. - 결과를 보면 Mean Square Error 때와는 다르게 \(\sigma'(z)\)의 값이 곱해지지 않는 것을 알 수 있습니다.
- 즉, backpropagation할 때, 레이어가 깊어질수록 값이 줄어드는 것을 개선할 수 있고 초기값에 둔감하게 학습할 수 있습니다.
- 따라서 Cross Entropy를 사용하는 경우 초기값이 학습에 영향을 끼치는 것을 둔감화 시킬 수 있고 학습이 둘 다 잘되는 것을 알 수 있습니다.
- 정리하면, backpropagation 관점에서는 Cross Entorpy를 (MSE 대신)Loss function으로 사용하는 것이 더 유리하고 그 이유는 학습할 때, \(\sigma'(z)\) 항이 없기 때문에 더 깊은 레이어 까지 학습이 가능하기 때문입니다.
- 이번에는
Maximum Likelihood관점에서 Loss function을 살펴보도록 하겠습니다. - 네트워크의 출력 값인 \(f_{\theta}(x)\)가 정답 \(y\)와 가까워지도록 하는 것이 학습의 목표입니다. 따라서 두 값이 다른 정도를 Loss function으로 두고 문제를 풀었습니다.
- 이것을 다른 관점인 “네트워크의 출력값이 있을 때, 우리가 바라는 정답이 발생할 확률이 높길(최대) 바라는 것”이라는 관점으로 살펴보려고 합니다. 즉,
Maximum Likelihood관점으로 살펴보면 다음과 같습니다.
- \[p(y \vert f_{\theta}(x))\]
- 이 관점에서 문제를 바라보려면 2가지 가정이 필요합니다.
- 먼저, 딥 뉴럴 네트워크 모델이 어떤 모델을 가지느냐 입니다. (사실 이것은 Backpropagation에서도 쉬운 구조를 가정했었습니다.)
- 또 한가지 추가되는 것은 확률 분포에 대한 likelihood가 최대화가 되도록 하고 싶으므로 이
확률 분포 모델을 미리 정해주어야 합니다. 예를 들면, 가우시안 분포인지, 베르누이 분포인지 등등…
- 확률 분포는 가우시안 분포임을 가정하고 진행해 보겠습니다.
- 이 가정 속에서 보면 네트워크의 출력은 확률 분포를 정의하기 위한
파라미터 추정이라고 할 수 있습니다.- 가우시안 분포라고 가정하였기 때문에, 여기서 추정하는 파라미터는 예를 들어 평균값이라고 할 수 있습니다. (편의를 위하 표준 편차는 무시하겠습니다.)
- 그러면 위 슬라이드의 그래프처럼 출력값이 \(f_{\theta_{1}}(x), f_{\theta_{2}}(x)\)일 때에 따라서, 다른 분포를 그릴 수 있습니다.
- 위 그래프에서 정답인 \(y\) 값은 고정된 값입니다.
- 이 때 우리가 살펴볼 관점이 Maximum Likelihood이고 추정하는 파라미터는 평균이기 때문에, 평균에 해당하는 값(확률 최댓값)이 \(y\)와 최대한 가까워 지길 원합니다.
- 관점만 다를 뿐 backpropagation일 때와 같은 내용을 다루는 것이 backpropagation에서는 네트워크 출력값과 정답값이 같기를 바라는것이고
- maximum likelihood 관점에서는 추정하는 파라미터 값의 확률 분포에서 확률이 최대가 되는점(최대 가능도)과 정답값이 같기를 바라는 것입니다.
- 이 문제를 풀기 위해서
Negative log likelihood를 최소화 하는 파라미터를 찾는 문제로 형태를 바꾸겠습니다.- 그러면 솔루션인 \(\theta^{*} = \operatorname*{argmin}_\theta[-log(p( y \vert f_{\theta}(x)))]\) 가 됩니다.
- 즉, 이 문제의 솔루션인 \(\theta^{*}\)는 뜻이 \(\theta^{*}\)로 확률 분포를 그렸을 때, 가장 확률이 높은 평균점이 정답값 \(y\)와 가장 가깝다는 의미입니다.
- 이렇게 해석하였을 때의 장점은 확률 분포 모델을 찾았기 때문에 고정 입력 값에 고정 출력이 아닌
샘플링을 통한 다른 출력을 낼 수 있습니다. (이 내용은 이후에 오토인코더와도 연관되어 있습니다.)
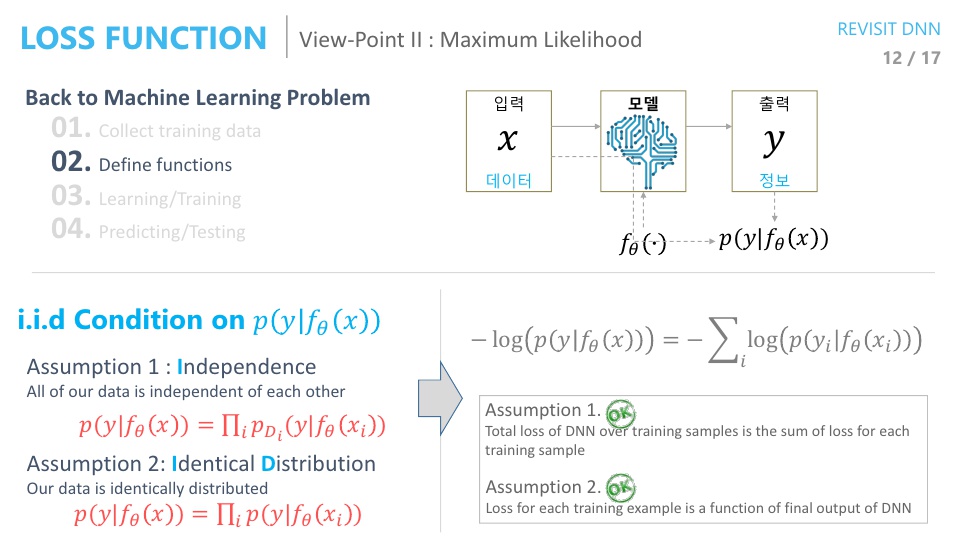
- 앞에서 사용한
Negative log likelihood가i.i.d조건을 만족시키는 지 한번 살펴보겠습니다. - 먼저
Independence조건은 다음 식을 통해 만족함을 보입니다.
- \[p(y \vert f_{\theta}(x)) = \prod_{i} \ p_{D_{i}} (y \vert f_{\theta}(x_{i}))\]
- 즉, 각각의 샘플에 대한 확률이 독립적이므로 그 값들을 모두 곱한 것에 대한 확률은 데이터 전체에 대한 확률과 동일합니다.
- 두번째 조건인
Identical distribution은 각 샘플에 대한 확률 분포가 모두 동일한 확률 분포를 이용한다는 전제입니다. (즉, 샘플별로 확률 분포가 다르지 않다는 것입니다.) - 이 두 조건을 모두 만족하기 때문에 \(-log(p(y \vert f_{\theta}(x))) = -\sum_{i} log(p(y_{i} \vert f_{\theta}(x_{i})))\)식을 만족하게 됩니다.
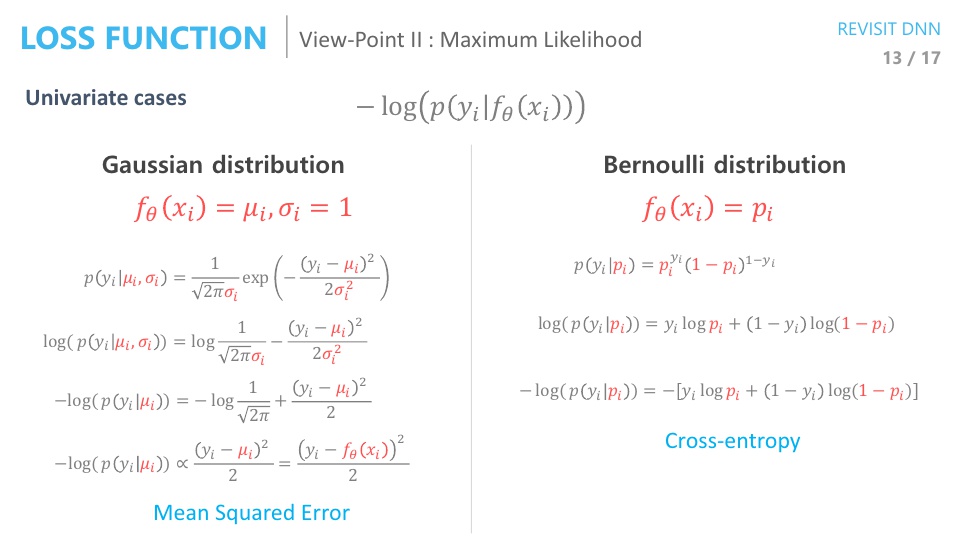
(위 슬라이드는 일변수 함수에 대한 식을 푼 것입니다.)
- 따라서 이전 슬라이드의
Negative log likelihood를 가우시안 분포와 베르누이 분포 각각에 대하여 최소화 되도록 풀면- 가우시안 분포 :
Mean Square Error로 정리가 되고 - 베르누이 분포 :
Cross Entropy로 정리가 됩니다. - 물론 \(-log(p(y_{i} \vert f_{\theta}(x_{i})))\)에서 \(f_{\theta}(x_{i})\)에 대한 확률 분포가 가우시안 또는 베르누이 라고 가정한 것입니다.
- 가우시안 분포 :
- 해석하면 우리가 생각하는 네트워크 출력값에 대한 확률 분포가 가우시안 분포에 가깝다고 생각이 들면
Mean Square Error를 사용하는 것이 낫다고 해석할 수 있고 - 반대로 네트워크 출력값이 베르누이 분포를 따른다고 생각이 들면
Cross Entropy를 쓰는 것이 낫다고 해석할 수 있습니다. - 이 때, continuous한 값은 주로 가우시안 분포를 따른 다고 가정해서 Mean Square Error가 좋다고 해석한 것이고
- 반대고 discrete한 값은 베르누이 분포를 따르 다고 가정해서 Cross Entropy가 좋다고 해석한 것입니다.
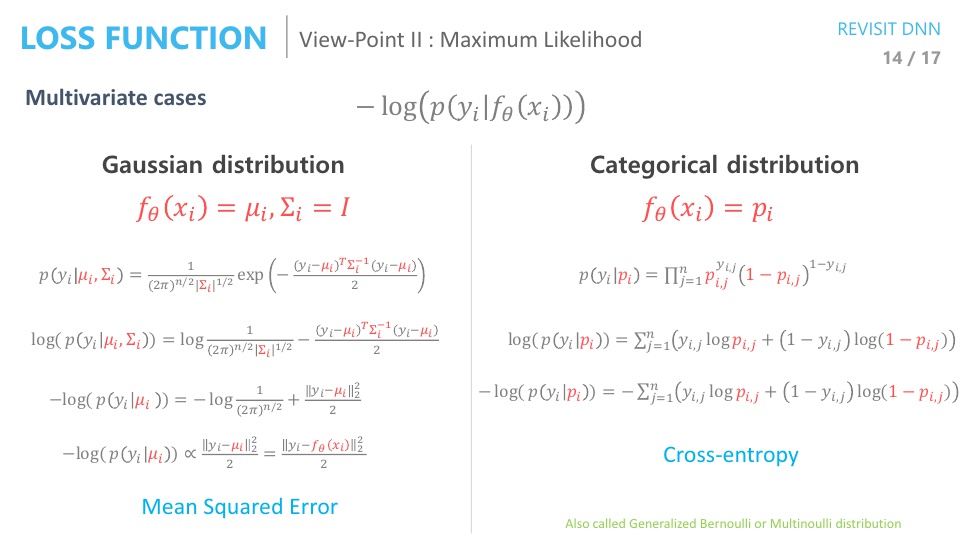
(위 슬라이드는 다변수 함수에 대한 식을 푼 것입니다.)
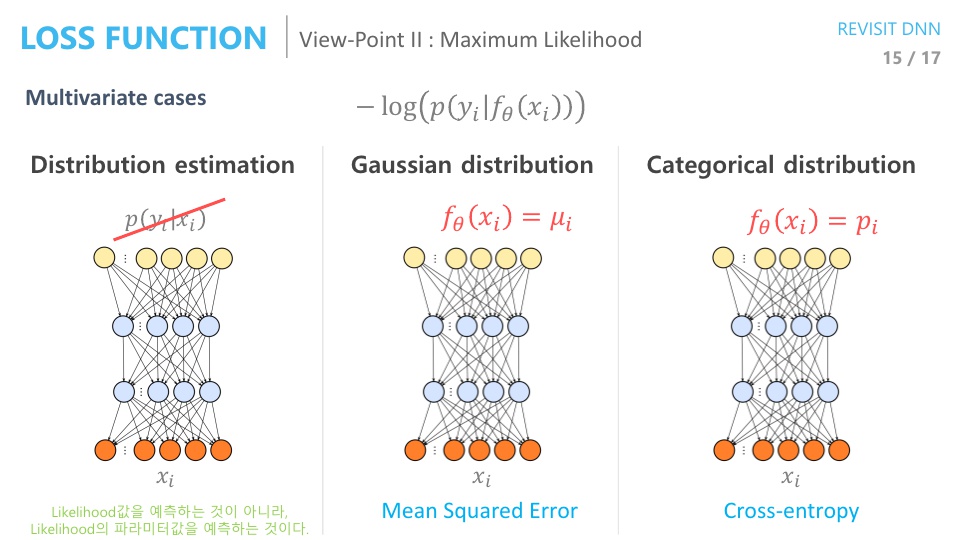
- 마지막으로 Maximum Likelihood 관점에서 해석을 할 때, 네트워크의 출력값이 likelihood값이 아니라는 것을 다시 상기시키고 가겠습니다.
- 사전에 확률 분포를 가정하였었고 그 확률 분포를 규정짓는
파라미터를 추정하는 것입니다.
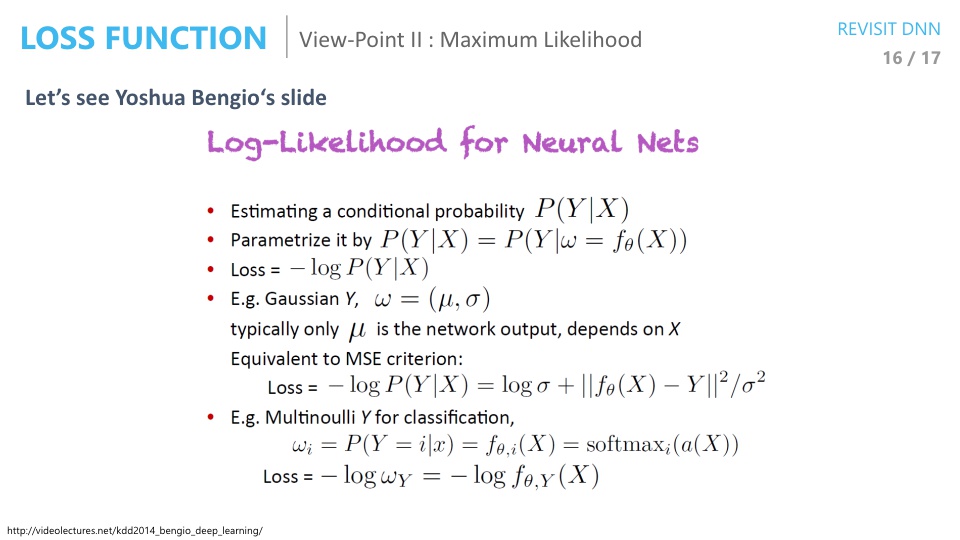
- 벤지오 교수의
Log likelihood for Neural Net해석을 한번 보겠습니다. - Estimating a conditional probability \(P(Y \vert X)\)
- 조건부 확률 \(P(Y \vert X)\)를 추정해 보려고 합니다. 이 때, \(Y\)는 정답값이고 \(X\)는 네트워크의 출력값 입니다.
- Parametrize it by \(P(Y \vert X) = P(Y \vert w = f_{\theta}(X))\)
- 여기서 네트워크의 출력 \(X\)는 확률 분포인데 그 확률 분포를 결정 짓는 파라미터 \(w\)에 의해서 최종 조건부 확률이 결정되어 집니다.
- 즉, 파라미터가 출력이 됩니다.
- Loss = \(-log P(Y \vert X)\)
- 여기서 loss는 backpropagation을 사용해야 하기 때문에 -log를 붙여서 계산합니다.
- E.g. Gaussian Y, \(w = (\mu, \sigma)\), typically only \(\mu\) is the network output, depends on \(X\)
- 여기서 확률 분포를 가우시안이라고 가정해 보면 평균과 분산 의 파라미터를 가지게 됩니다.
- Equivalent to MSE criterion : \(\log{P(Y \vert X)} = \log{\sigma} + \Vert f_{\theta}(X) - Y \Vert^{2} / \sigma^{2}\)
- 가우시안 분포로 가정해서 negative log likelihood를 최소화 하면 MSE가 됩니다.
- Multinoulli Y for classification : \(w_{i} = P(Y = i \vert x ) = f_{\theta, i}(X) = \operatorname*{softmax}_{i} (a(X))\), Loss = \(-log(w_{Y}) = -log(f_{\theta, Y}(X)\)
- 베르누이 분포(멀티누이 분포)로 가정해서 negative log likelihood를 최소화 하면 Cross Entropy가 됩니다.
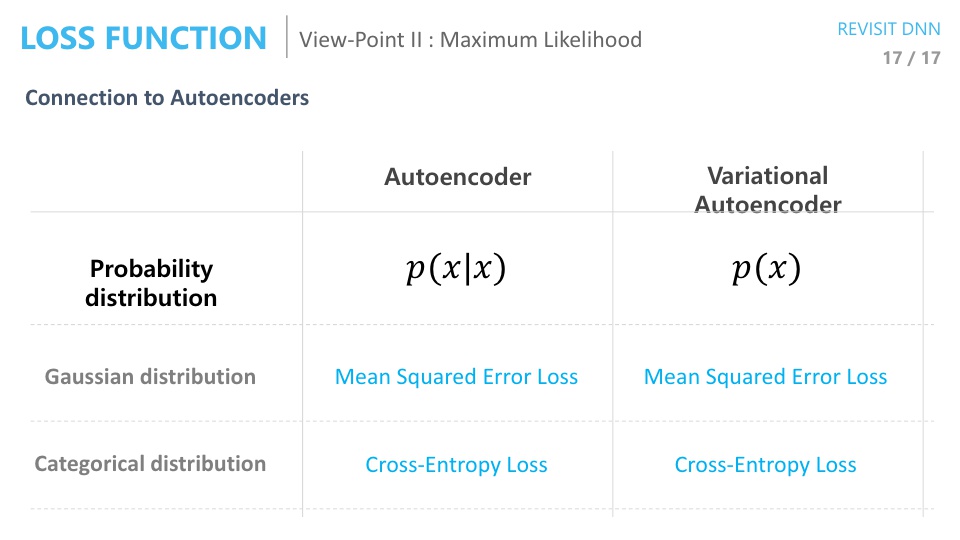
- 지금까지 다른 Loss function은 Mean Square Error와 Cross Entropy가 있는데, 각 Loss function을 사용하여 학습 시키는 것을 해석을 할 때, 한 경우는
가우시안으로 다른 한 경우는카테고리컬한 것으로 생각할 수 있었습니다. - 이것을
오토인코더와 연관을 시켜보려고 합니다. 오토인코더는 네트워크의 입력이 \(x\)이고 출력도 입력과 같이 \(x\)이길 바라는 것이고 배리에이셔녈 오토인코더에서는 조건부 확률이 없고 단지 트레이닝 DB의 확률 분포 그 자체를 추정을 하게 됩니다.