Depthwise separable convolution 연산
2019, Oct 14
- 출처: https://youtu.be/T7o3xvJLuHk
- 이번 글에서는
convolution연산 방법 중 하나인depthwise separable convolution에 내용에 다루어 보도록 하겠습니다. - 제 블로그의
mobilenet관련 글을 참조하셔도 좋습니다.
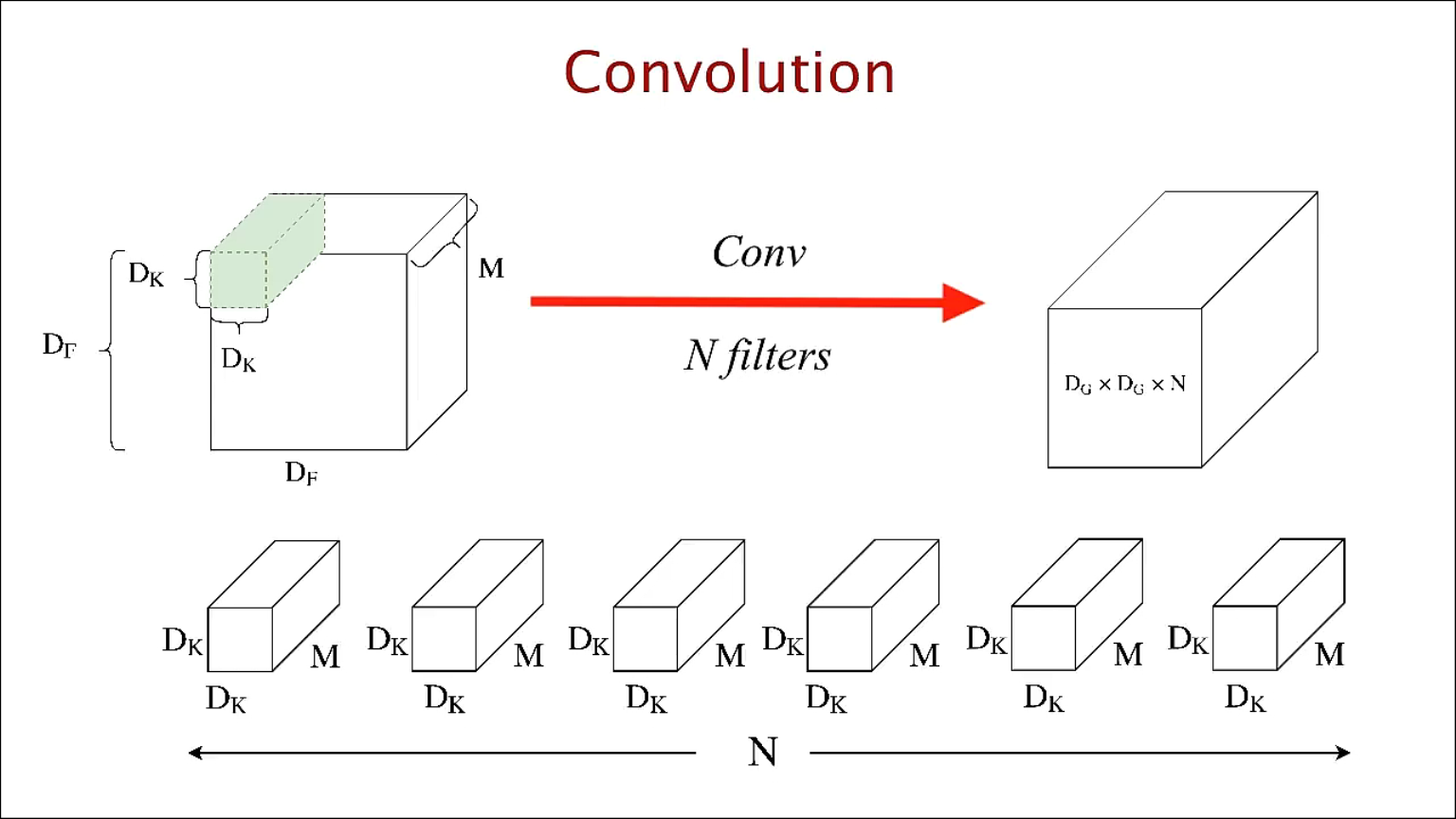
- 위 슬라이드는 일반적인 convolution 연산을 나타냅니다.
- 살펴보면 \(D_{F}\)는 height와 width의 크기이고 \(M\)은 채널의 크기입니다. 인풋이 컬러 이미지라면 \(M\)은 R,G,B로 3입니다.
- 따라서 인풋의 shape은 \((D_{F}, D_{F}, M)\)이 됩니다.
- 그리고 \(D_{K}\)는 필터(커널)에 해당합니다. 필터의 채널은 인풋의 채널과 같기 때문에 똑같이 \(M\)이 됩니다.
- 인풋이 필터를 거쳐 convolution 연산을 하게 되면 결과물로 매트릭스가 한 개 나오게 됩니다. (채널이 1인 텐서인 형태입니다.)
- 그 다음 필터의 갯수가 \(N\)에 해당하는데 필터의 종류(N개) 만큼 convolution 연산을 하기 때문에 총 \(N\)개의 매트릭스가 결과물로 나오게 됩니다.
- 이것들을 모두 쌓으면 출력단에 \((D_{G}, D_{G}, N)\) shape의 volume이 출력물로 나오게 됩니다.
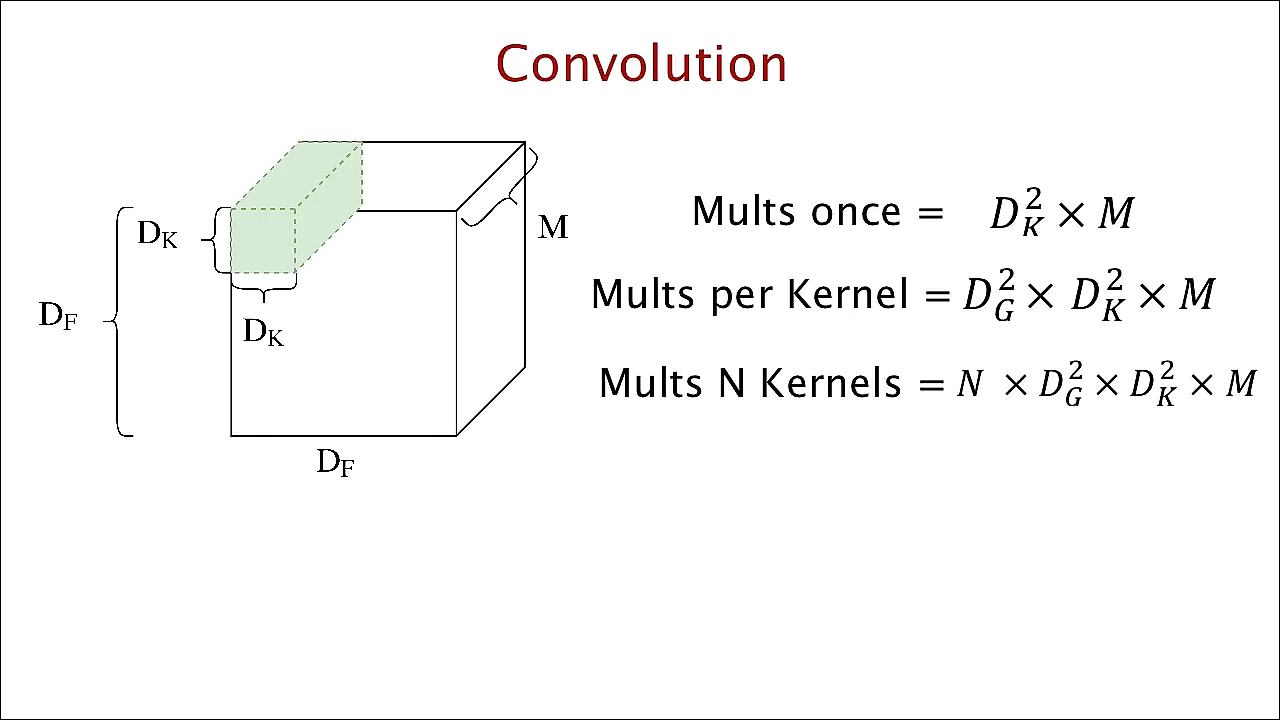
- 그러면 이 연산의 연산량이 얼마가 되는지 간략하게 알아보겠습니다. 연산량을 간단하게 알아보기 위해
곱연산을 기준으로 알아보겠습니다. - 먼저 한 개의 필터가 인풋의 한 위치에서 처리할 때 사용되는 곱연산은 \(D_{K}^{2} \times M\)이 됩니다.
- 이 때, 이동할 수 있는 위치의 경우의 수가 \(D_{G} \times D_{G}\)의 경우가 있기 때문에(\(D_{G}\)는 아웃풋의 height, wdith 크기) 필터 하나가 인풋 하나를 처리하는 데 필요한 연산 수는 \(D_{G}^{2} \times D_{K}^{2} \times M\)이 됩니다.
- 마지막으로 \(N\)개의 필터가 있다면 아웃풋은 \((D_{G}, D_{G}, N )\) 크기를 가지고 연산량도 \(N \times D_{G}^{2} \times D_{K}^{2} \times M\)가 됩니다.
depthwise separable convolution은 \(N \times D_{G}^{2} \times D_{K}^{2} \times M\) 연산량을 줄이는 것이 목표입니다.
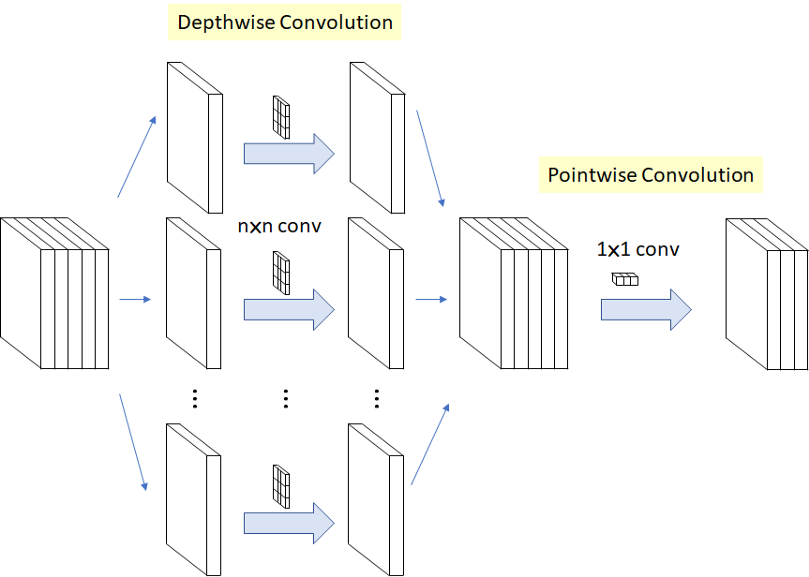
depthwise separable convolution은 두가지 과정을 거칩니다.depthwise convolution: filtering stagepointwise convolution: combination stage
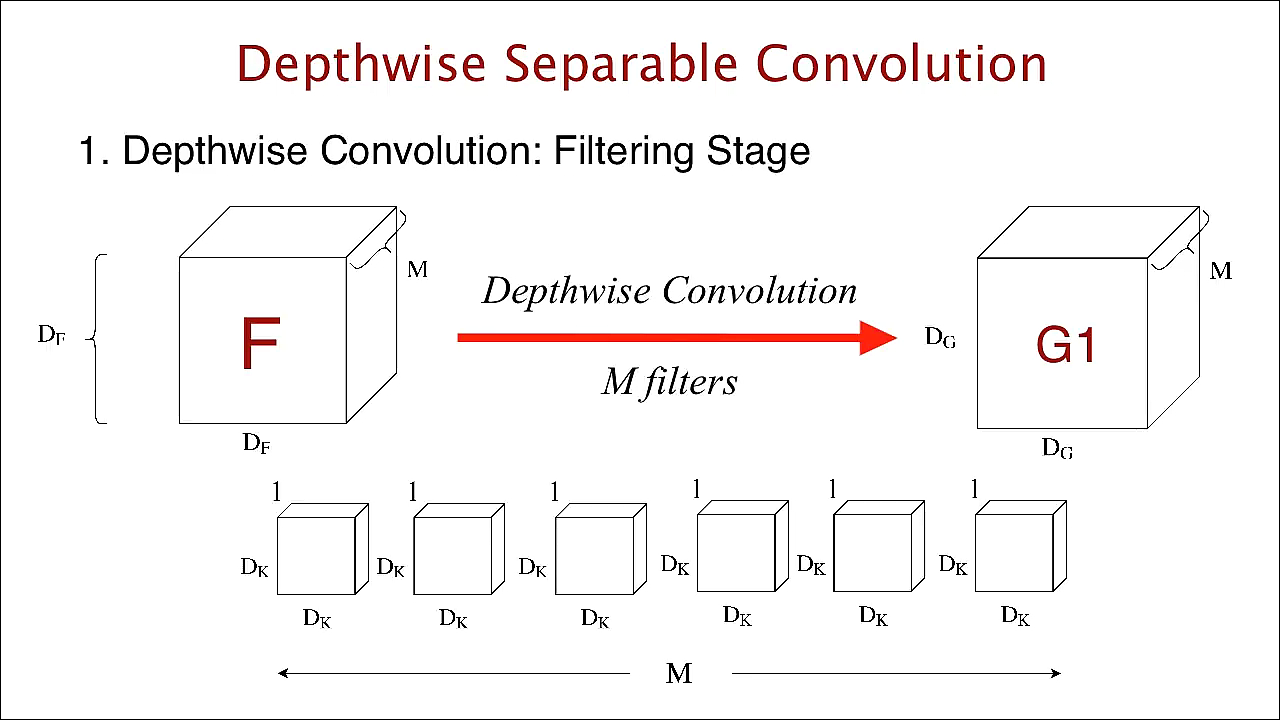
- 먼저
depthwise convolution부터 알아보겠습니다. - standard convolution 연산에서는 한 개의 필터가 \(M\) 채널 전체에 convolution 연산을 하였습니다.
- 반면 여기서는 한 개의 필터가 한 개의 채널에만 연산을 합니다. 즉, 인풋의 첫번째 채널에 해당하는 영역을 \((D_{F}, D_{F}, M_{1})\) 이라고 한다면 이 1채널 인풋과 유일하게 연산되는 필터 \((D_{k}, D_{k}, 1)\)이 존재합니다.
- 그러면 \((D_{F}, D_{F}, M_{i})\)는 \((D_{K}, D_{K}, M_{i})\)와 대응되므로 이 연산에서는 총 \(M\)개의 필터가 존재하게 됩니다.
- 연산을 마치면 최종적으로 \((D_{G}, D_{G}, M)\)의 volume이 출력됩니다.
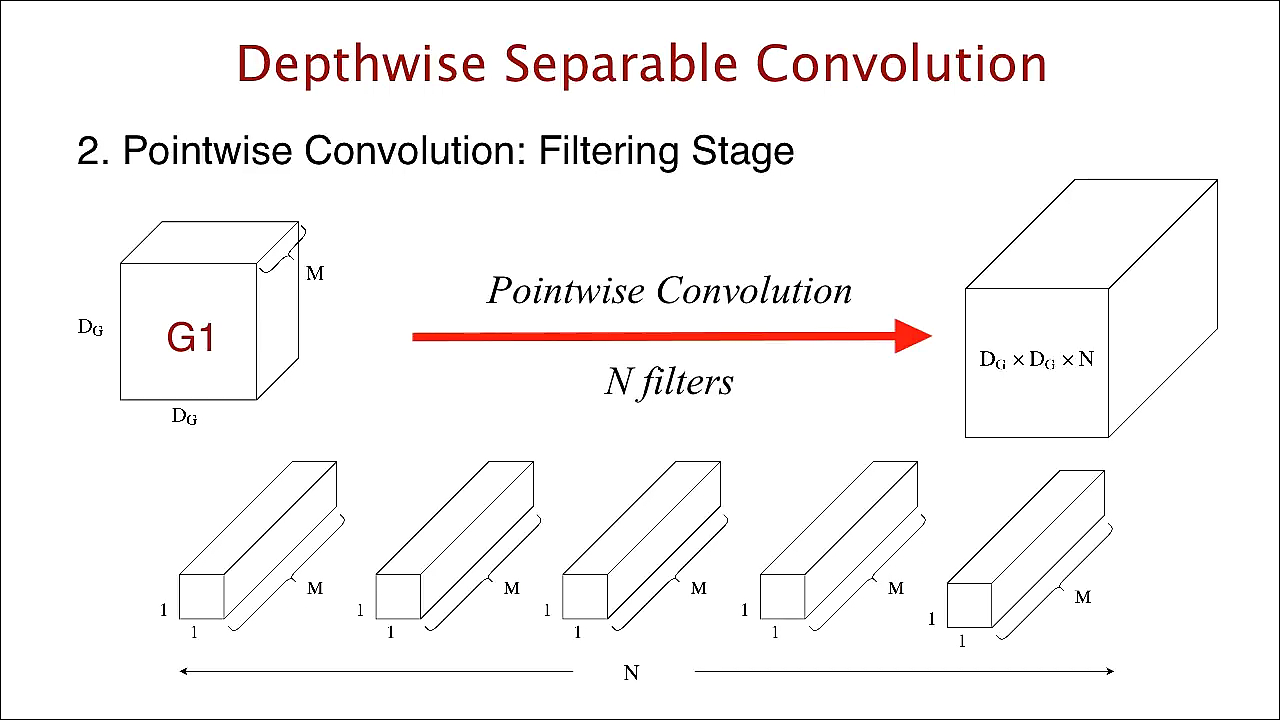
- 이 다음 연산은
pointwise convolution입니다. - depthwise convolution 연산을 마치면 출력이 \((D_{G}, D_{G}, M)\) 이었습니다.
- 여기서 1 x 1 convolution을 적용하는 것이 이번 연산의 핵심입니다. \((D_{G}, D_{G}, M)\)에 \((1, 1, M)\) 필터를 convolution 연산을 취해줍니다.
- 그러면 \((D_{G}, D_{G}, M) \otimes (1, 1, M) = (D_{G}, D_{G}, 1)\)이 됩니다. 이 연산을 \(N\)개의 \((1, 1, M)\) 필터를 이용하여 적용하면 총 \(N\)개의 매트릭스(\((D_{G}, D_{G}, 1)\) 가 \(N\)개)가 출력 됩니다.
- 이 출력물들을 stack 하면 결과적으로 \((D_{G}, D_{G}, N)\)의 출력물을 만들 수 있습니다.
- 입력과 출력 기준으로 보면
standard convolution과depthwise separable convolution모두 \((D_{F}, D_{F}, M)\)을 입력으로 넣어서 \((D_{G}, D_{G}, N)\)의 출력을 얻는다는 점은 같습니다. - 다만 내부 convolution 연산 과정에서
depthwise separable기법으로 2단계로 나누어 좀 더 연산량과 파라미터 수를 줄였다는 것이 핵심입니다. - 그러면 얼마나 연산량이 줄었는지 살펴보겠습니다.
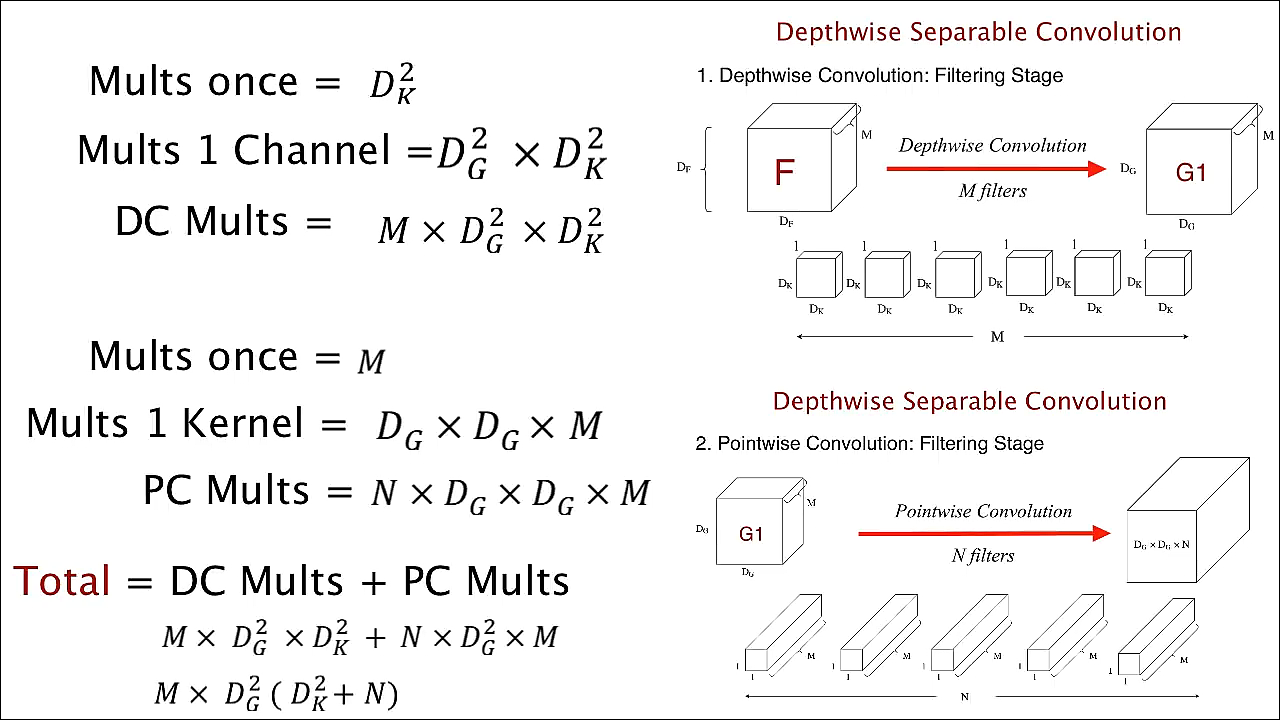
- 첫번째로
depthwise convolution의 연산량입니다. - 한 위치에서 필터가 연산되는 곱연산은 \(D_{K}^{2}\) 이고 한 채널 전체에서 필터가 연산되는 곱연산은 \(D_{G}^{2} \times D_{K}^{2}\)입니다.
- 마지막으로 \(M\)개의
채널에 모두 적용되어야 하므로 총 곱연산은 \(M \times D_{G}^{2} \times D_{K}^{2}\)가 됩니다. - 두번쨰로
pointwise convolution의 연산량입니다. - 한 위치에서 1x1 필터가 연산되는 곱 연산은 \(M\) 입니다. 그리고 한 채널 전체에서 연산되는 곱연산은 \(D_{G}^{2} \times M\)이 됩니다.
- 마지막으로 \(N\)개의
필터가 모두 적용되어야 하므로 총 곱연산은 \(N \times D_{G}^{2} \times M\)이 됩니다.
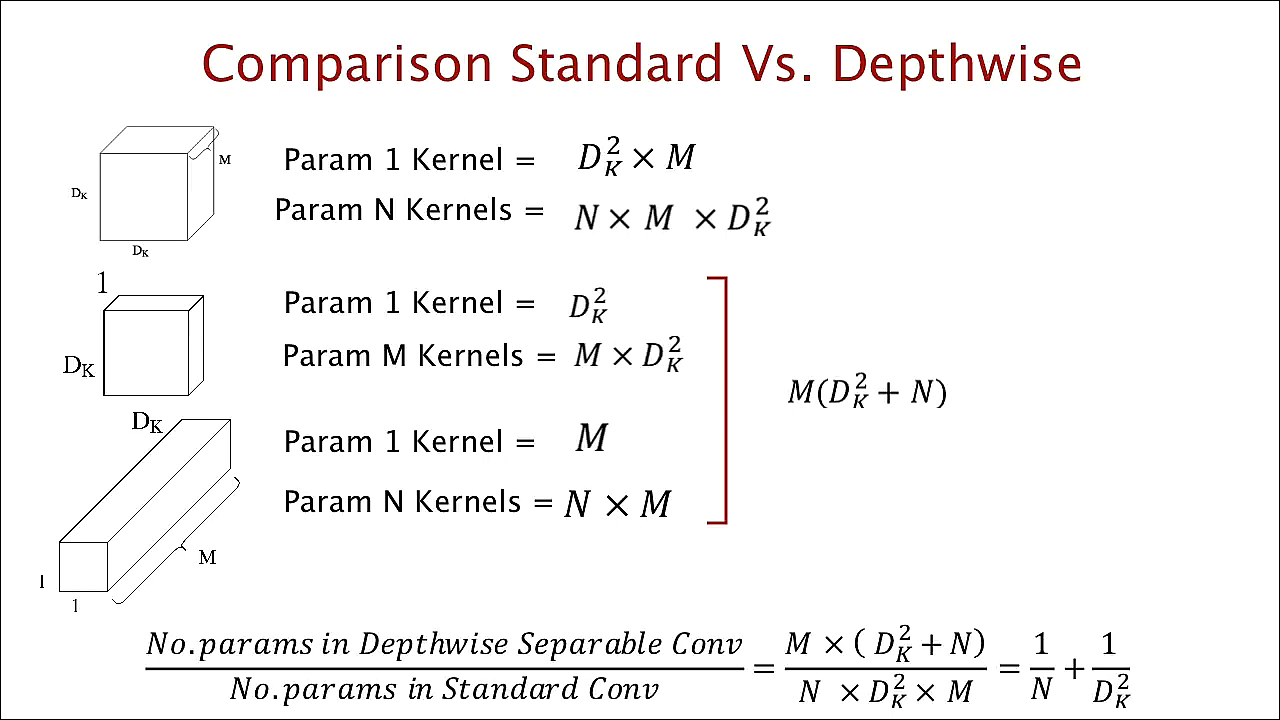
- 그러면 얼마나 연산량이 줄었나 확인해보도록 하겠습니다.
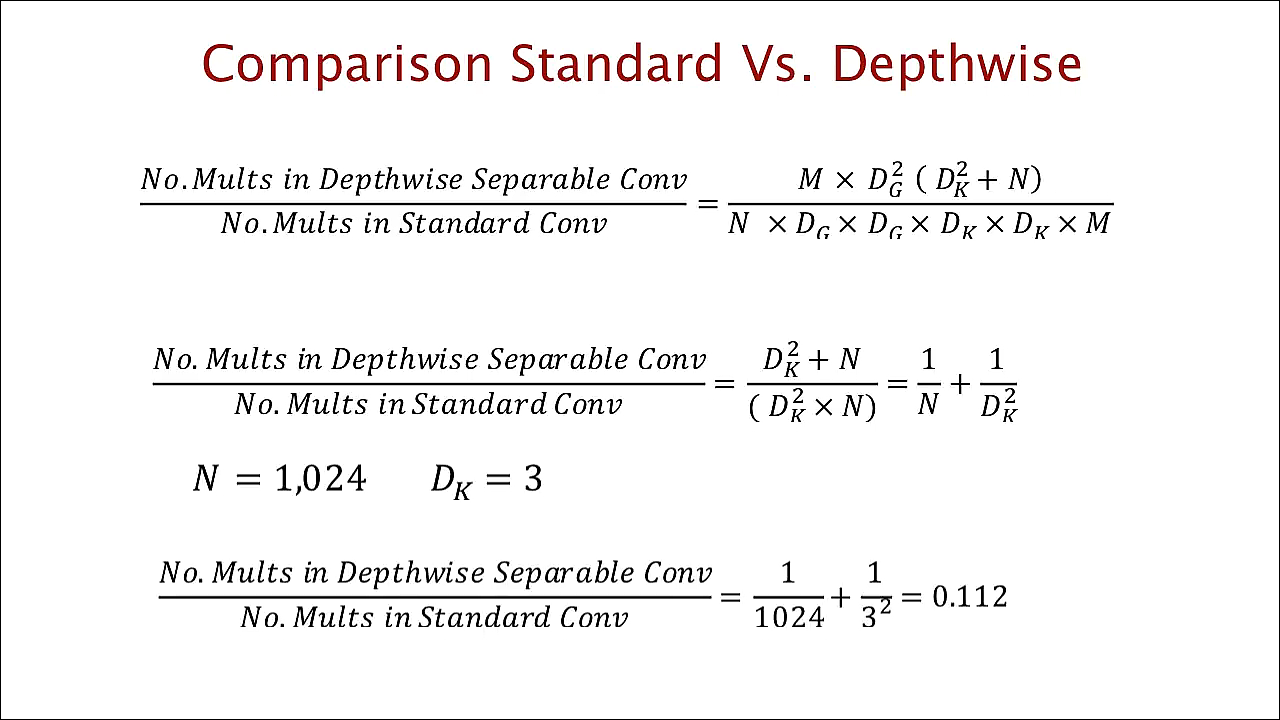
standard convolution의 연산량은 \(N \times D_{G}^{2} \times D_{K}^{2} \times M\) 이고depthwise separable convolution의 연산량은 \(M \times D_{G}^{2}(D_{K}^{2} + N)\)이 됩니다.- 위 슬라이드와 같이 비율을 확인해 보면 \((1 / N) + (1 / D_{K}^{2})\)이 됩니다.
- \(N\)은 아웃풋 채널의 수이고 \(K\)는 필터의 사이즈이므로 일반적인 예를 들어 \(N = 1024, K = 3\)이라고 하면 \((1/1024) + (1/9) = 0.112..\)가 됩니다.
- 즉, 필터의 사이즈에 가장 큰 영향을 받게 되고 필터의 크기는 3을 사용하므로 약 \(1/9\)만큼 연산량이 줄어든것을 확인할 수 있습니다.
- 다시 정리하면 위와 같습니다.
- 개념에 대해서는 다 배웠습니다! 이 연산 기법은
Xecption,Mobilenet V1, V2에 현재 활발히 사용되고 있으니 정확히 공부해 놓는것이 좋을 것 같습니다.