신호와 시스템 (Signal and System)
2021, Feb 16
목차
-
신호와 시스템의 정의
-
연속 시간 신호와 이산 시간 신호
-
독립 변수의 변환
-
지수 신호와 정현파 신호
-
단위 임펄스 및 단위 계단 함수
-
연속 시간 및 이산 시간 시스템
-
기본적인 시스템 특성
신호와 시스템의 정의
- 이번 글에서는 신호와 시스템의 기본적인 개념에 대하여 배워 보도록 하겠습니다
- 먼저 이번 글에서 다룰
신호와시스템의 정의를 살펴 보겠습니다 신호는 송수신간의 약속된 정보를 뜻하며 신호의 반대되는 말은 노이즈(잡음)입니다. 즉, 노이즈에는 송수신간 약속된 정보가 들어있지 않습니다시스템은 신호를 처리하는 것을 소프트웨어 또는 하드웨어를 뜻합니다.
연속 시간 신호와 이산 시간 신호
- 신호는 대표적으로 연속 시간의 신호와 이산 시간의 신호로 나뉘게 됩니다.
- 신호를 나타낼 때, 가로축은 시간(t)을 나타내고 세로축은 시간에 따른 신호의 진폭을 나타냅니다.
- 먼저 연속 시간 신호에서는 시간과 진폭이 모두 연속적인 값을 가집니다. 흔히 말하는 아날로그 신호를 뜻합니다.
- 예를 들어 흔히 사용되는 마이크가 입력되는 소리를 연속 시간의 신호로 바꾼 아날로그 신호입니다. 이 때, 이 아날로그 신호를 처리하는 것이 아날로그 시스템입니다.
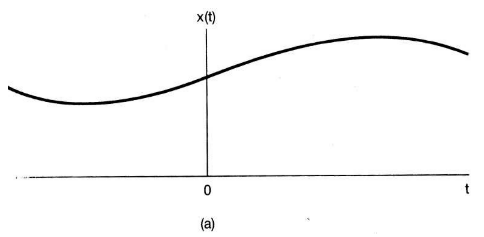
- 이러한 아날로그 신호를 표현할 때, 가로 축 시간은 \(t\)로 표현하고 세로축 진폭은 \(x(t)\)로 표현하도록 하겠습니다.
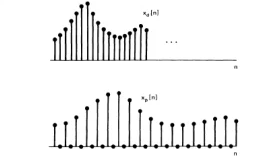
- 반면 이산 시간 신호는 시간 축이 불연속적인 값을 가집니다. 위 그래프와 같이 가로축의 값이 정수 단위로 끊어져 있습니다.
- 이는 연속 시간 신호에서 시간 축을 기준으로
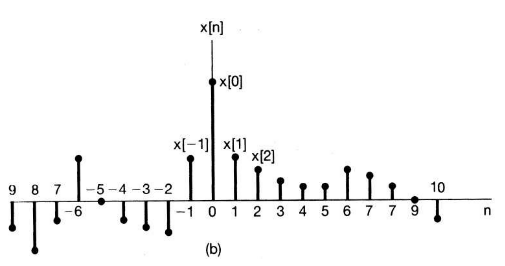
표본화(Sampling)을 거쳐서 이산 시간 신호의 값으로 표현합니다. - 이산 시간 신호에서의 시간 값은 정수이므로 \(n\)으로 표기하겠습니다. 그리고 진폭의 값은 \(x[n]\)으로 나타내어 연속 시간의 신호 값과 차이를 두도록 하겠습니다.
- 이산(Discrete) 시간 신호와 간혹 디지털(Digital) 신호에 대하여 헷갈릴 수 있습니다.
디지털 신호는 이산 시간 신호에서 양자화와 부호화 과정을 거친 신호를 뜻합니다. - 먼저 앞에서 설명한 바와 같이
이산 시간 신호는 연속 시간 신호 → 샘플링를 뜻합니다. - 반면
디지털 신호는 연속 시간 신호 → 샘플링 → 양자화(quantization) → 부호화(encoding)까지 거친 신호를 뜻합니다. - 양자화는 연속/이산 시간 신호에서 신호의 진폭 값이 실수인데 이를 정수로 나타내는 것을 뜻합니다.
- 부호화는 정보의 형태나 형식을 표준화, 보안, 처리 속도 향상, 저장 공간 절약 등을 위해서 다른 형식으로 변환하는 처리를 뜻합니다.
- 지금까지 연속 및 이산 시간 신호의 뜻에 대하여 알아보았습니다. 이번에는 각 신호의
총 에너지,평균 전력에 대하여 알아보도록 하겠습니다. - 먼저 기본적인 에너지와 전력에 관련된 공식들을 나열해 보겠습니다.
- \(P = v * i = R*i^{2} = \frac{v^{2}}{R}\) (전력에 관한 전압, 전류, 저항의 관계), \(v = R * i\)
- \(w = \int P \ dt = R \int i^{2} \ dt = \frac{1}{R} \int v^{2} dt\) (에너지는 전력 \(P\)의 적분 값)
- \(\frac{dw}{dt} = P\) (에너지와 전력의 관계)
- 앞에서 살펴본 연속/이산 시간 신호에서의 세로축인 진폭은 신호의 크기나 세기를 나타내며 단위는 v(전압) 입니다.
- 이 점을 이용하여 아래 연속 시간 신호에서의 신호 세기인 \(x(t)\)와 이산 시간 신호에서의 신호 세기인 \(x[n]\)을 이용하여 에너지 및 전력을 수식으로 어떻게 나타내는 지 살펴보도록 하겠습니다.
연속 시간 신호에서의 에너지 및 전력
- 먼저 연속 시간 신호에서의 에너지 및 전력에 대하여 알아보도록 하겠습니다.
- 앞에서 설명한 바와 같이
에너지는 전력의 적분값을 이용하고전력은 전압, 전류, 저항을 이용하여 나타낼 수 있습니다.
- ① \(t_{1} \le t \le t_{2}\) 에서의 총 에너지 : \(\int_{t_{1}}^{t_{2}} \vert x(t) \vert^{2} dt\)
- ② \(t_{1} \le t \le t_{2}\) 에서의 평균 전력 : \(\frac{1}{t_{2} - t_{1}} \int_{t_{1}}^{t_{2}} \vert x(t) \vert^{2} dt\)
- ③ \(-\infty \le t \le \infty\) 에서의 총 에너지 : \(E_{\infty} = \lim_{T \to \infty}{\int_{t_{1}}^{t_{2}} \vert x(t) \vert^{2} dt} = \int_{-\infty}^{\infty} \vert x(t) \vert^{2} dt\)
- ④ \(-\infty \le t \le \infty\) 에서의 평균 전력 \(P_{\infty}\) : \(P_{\infty} = \lim_{T \to \infty}{\frac{1}{2T} \int_{t_{1}}^{t_{2}} \vert x(t) \vert^{2} dt}\)
- 먼저 ①, ③을 구할 때에는 \(w = \frac{1}{R} \int v^{2} dt\)에서 \(R = 1\)로 가정한 상태의 식을 적용하였습니다.
- 왜냐하면
에너지(힘:w)의 개념 즉, 변화량에 대한 적분을 하는 개념에서시간(t)함수는전류(i)와전압(v)에는 관계되지만저항(R)은 시간의 변화와 관련없기 때문에 상수값 1로 가정할 수 있습니다.
- 왜냐하면
- ②, ④에서는 \(dw / dt = P\)를 이용하여 식을 전개하였습니다. 즉, 시간 구간인 \(t2 - t1\)이 시간 변화량 \(dt\)와 같이 적용되었습니다.
- 이 때, 4개의 식 전체에 사용된 \(\vert x(t) \vert\)는 어떻게 적용된 것일까요?
- 앞에서 설명한 바와 같이 신호의 진폭(v)인 \(x(t)\)의 제곱을 계산에 적용해야 합니다. 복소수의 범위로 보았을 때, 단순한 제곱이 아니라 \(\vert x \vert^{2} = x \cdot \bar{x}\)의 형태로 (\(\bar{x}\)는 켤레 복소수) 제곱을 취해주어야 주어서 실수값으로 만듭니다.. 이 때, 두 값을 정의하면 다음과 같이 정의할 수 있습니다.
- \[x = a + jb\]
- \[\bar{x} = a - jb\]
- \[x \cdot \bar{x} = a^{2} + b^{2} \ \ \because j = \sqrt{-1}, \ \ j^{2} = -1\]
- \[\vert x \vert = \sqrt{a^{2} + b^{2}} \ \ \ \ \cdots \text{absolute value of complex number}\]
- \[\color{blue}{\vert x \vert^{2}} = (\sqrt{a^{2} + b^{2}})^{2} = \color{blue}{x \cdot \bar{x}}\]
- 위 과정을 통하여 만약 \(x(t)\)가 복소수라면 \(\vert x(t) \vert^{2} = x(t) \cdot \bar{x(t)}\)를 통하여 실수화하여 계산에 적용합니다. 만약 \(x(t)\)가 실수라면 단순히 \(x(t)^{2}\)으로 계산을 해도 상관없습니다.
이산 시간 신호에서의 에너지 및 전력
- 이산 시간 신호에서의 에너지 및 전력은 연속 시간 신호에서 사용한 적분을 이산값의 합인 \(\sum\)으로 바꿔서 적용합니다.
- ① \(n_{1} \le n \le n_{2}\) 에서의 총 에너지 : \(\sum_{n=n_{1}}^{n_{2}} \vert x[n] \vert^{2}\)
- ② \(n_{1} \le t \le n_{2}\) 에서의 평균 전력 : \(\frac{1}{n_{2} - n_{1} + 1} \sum_{n=n_{1}}^{n_{2}} \vert x[n] \vert^{2}\)
- ③ \(-\infty \le n \le \infty\) 에서의 총 에너지 : \(E_{\infty} = \lim_{N \to \infty}{\sum_{n=-N}^{N} \vert x[n] \vert^{2} } = \sum_{n=-\infty}^{\infty} \vert x[n] \vert^{2}\)
- ④ \(-\infty \le n \le \infty\) 에서의 평균 전력 \(P_{\infty}\) : \(P_{\infty} = \lim_{N \to \infty}{\frac{1}{2N+1} \sum_{n=-N}}^{N} \vert x[n] \vert^{2}}\)
- 연속/이산 시간 신호에서 구한 \(E_{\infty}\)와 \(P_{\infty}\)의 관계를 보았을 때, 전체 구간에서 에너지와 전력은 다음 관계가 성립함을 알 수 있습니다.
- ① 전체 구간에서 총 에너지가 유한하다면 평균 전력은 0이고 그 역도 성립한다. (\(E_{\infty} \lt \infty \leftrightarrow P_{\infty} = 0\))
- ② 전체 구간에서 총 에너지가 무한하다면 평균 전력은 유한하며 그 역도 성립한다. (\(E_{\infty} = \infty \leftrightarrow P_{\infty} \lt \infty\))
독립 변수의 변환
- 앞에서 다룬 신호에서의
독립 변수는 시간 \(t\) 입니다. 이번에는 시간 \(t\)의 변환을 주었을 때, 신호가 어떻게 달라지는 지 살펴보도록 하겠습니다. - 대표적으로
시간 변위(time shift),시간 반전(time reversal),시간 배율(time scaling),주기 신호(periodic signal)이 있습니다.
- 먼저 시간 변위에 대하여 살펴보도록 하겠습니다.
시간 변위(time shift): \(x(t) \to x(t - t_{0}), x[n] \to x[ n-n_{0}]\) 에 대하여- 만약 \(t_{0} > 0\) 이면, \(x(t - t_{0})\)은 \(x(t)\)의 지연 신호 (또는 과거 신호) 입니다.
- 만약 \(t_{0} < 0\) 이면, \(x(t - t_{0})\)은 \(x(t)\)의 앞선 신호 (또는 미래 신호) 입니다.
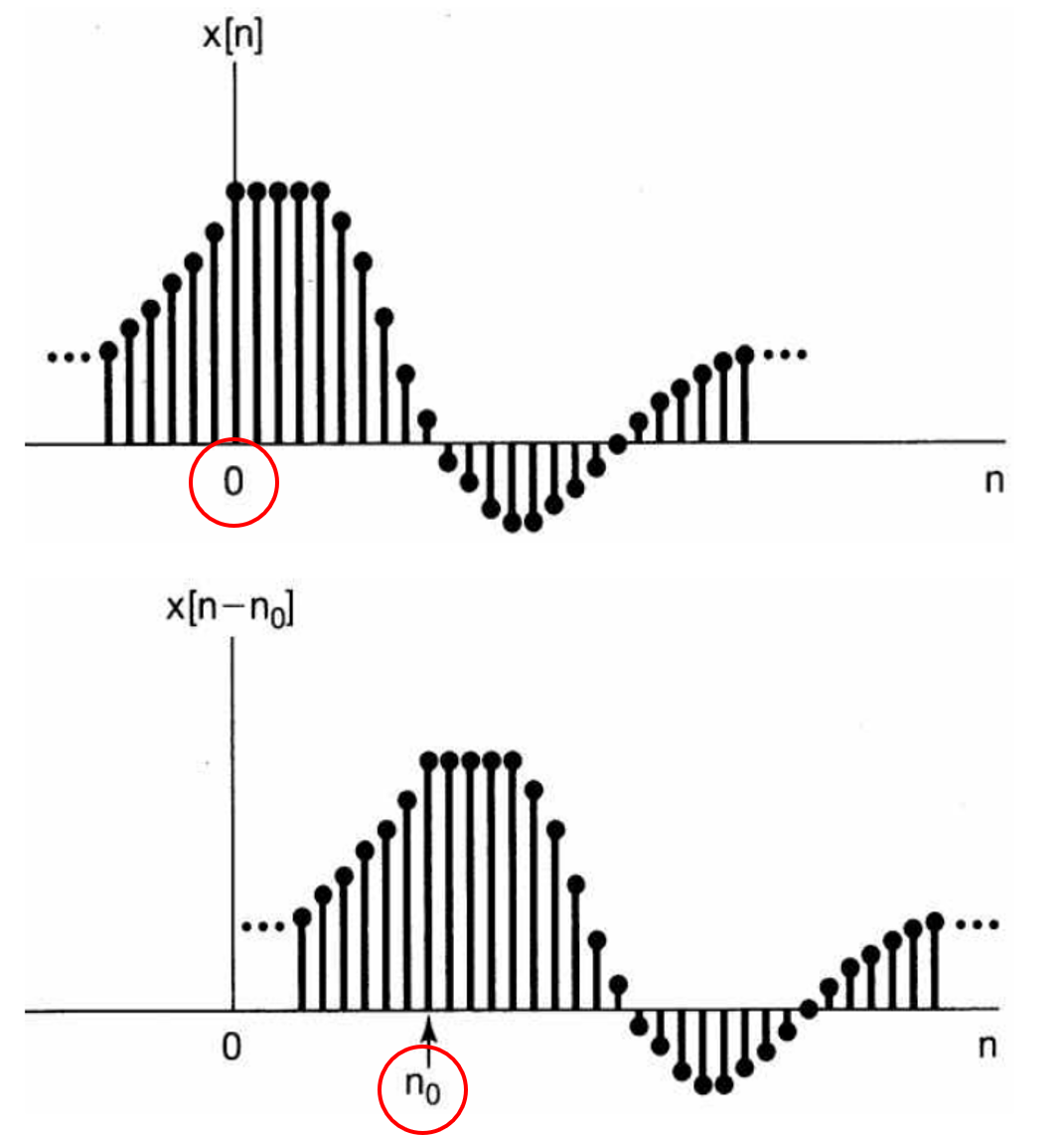
- 위 그래프를 보면 \(n_{0}\)만큼 시간 변위가 발생한 것을 확인할 수 있습니다. 이 때, \(n_{0}\)을
지연 시간이라고 합니다. 왜냐하면 기존에 시간 0에서 나타났던 신호가 \(n_{0}\) 만큼 지연되어서 신호가 나타났기 때문입니다. 이미 나타난 신호가 지연되어서 나타났기 때문에과거 신호라고도 부릅니다. 앞선 신호또는미래 신호라고 불리는 시간 변위는 지연 신호와 반대로 생각하면 됩니다.
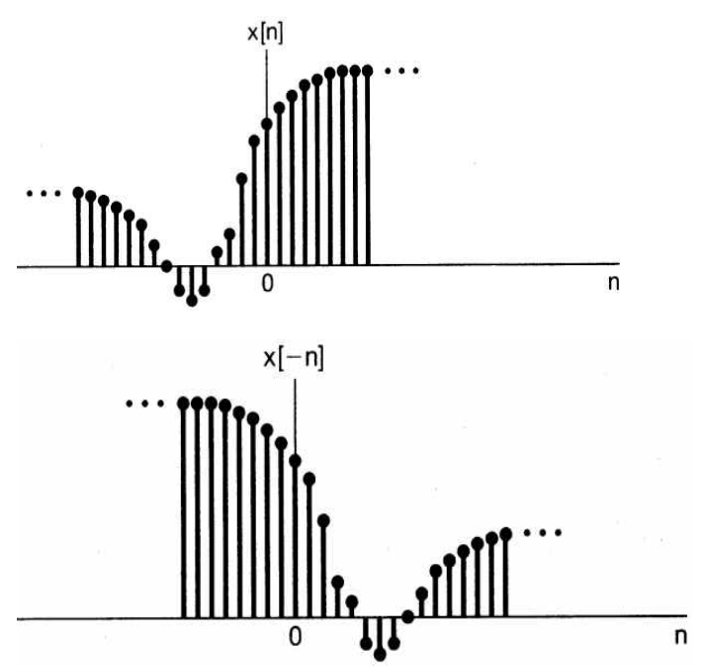
시간 반전(time reversal): \(x(t) \to x(-t), x[n] \to x[-n]\)- \(x(-t)\)는 \(x(t)\)의 \(t = 0\) (y축) 대칭
- \(x[-n]\)는 \(x[n]\)의 \(n = 0\) (y축) 대칭
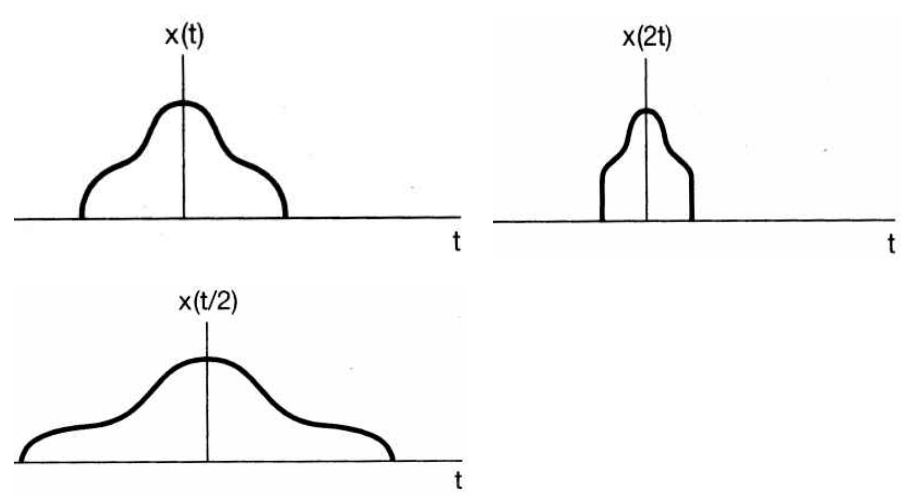
시간 배율(time scaling): \(x(t) \to x(a * t)\)- \(0 < a < 1\) 일 때, \(x(a*t)\)의 \(t\) 축의 폭이 증가
- \(a > 1\) 일 때, \(x(a*t)\)의 \(t\) 축의 폭이 감소
- 위의 3가지 독립 변수 \(t\)의 변환을 이용하여 아래 예제를 한번 살펴보겠습니다.
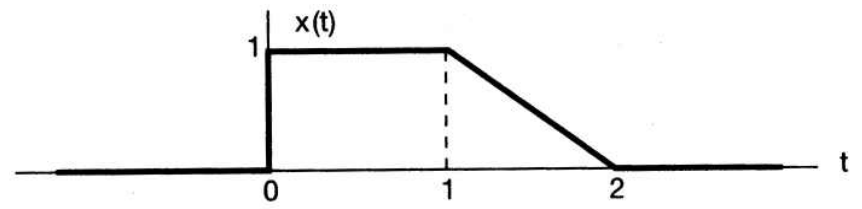
- 먼저 위 신호와 같은 \(x(t)\)가 있을 때, \(t\)의 변화에 따라 어떻게 신호가 바뀌는 지 살펴보도록 하겠습니다.
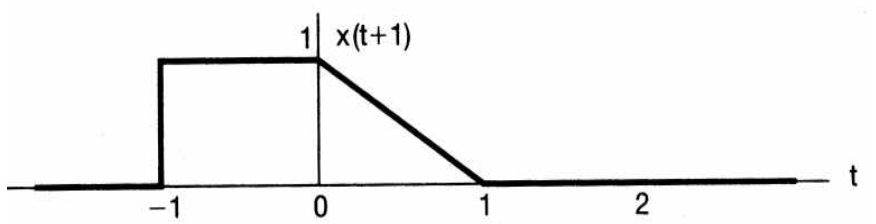
- 위 예제는 \(x(t + 1)\) 입니다.
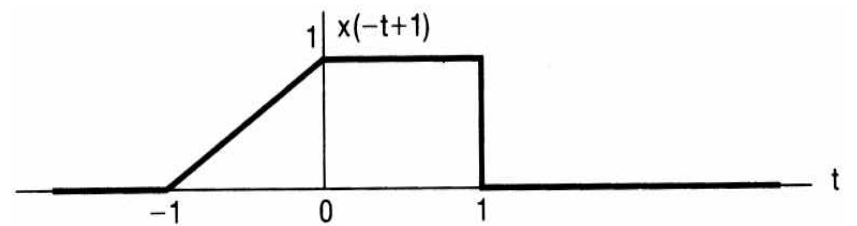
- 위 예제는 \(x(-t +1) = x(-(t - 1))\) 입니다.
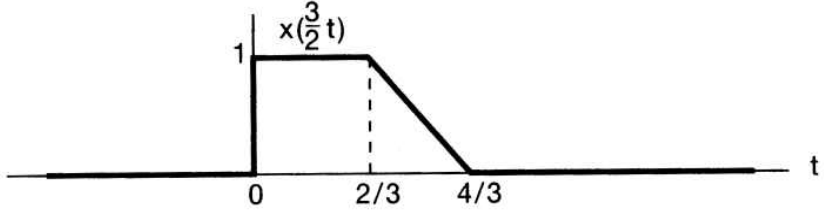
- 위 예제는 \(x(\frac{3}{2}t)\) 입니다.
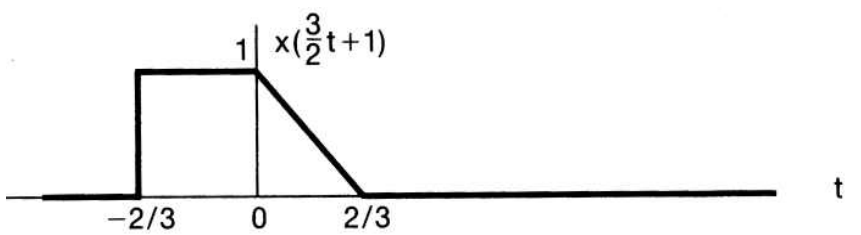
- 위 예제는 \(x(\frac{3}{2}t + 1)\) 입니다.
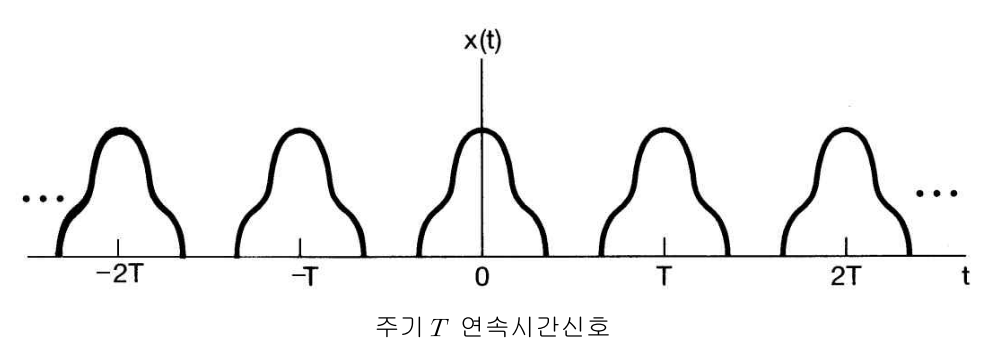
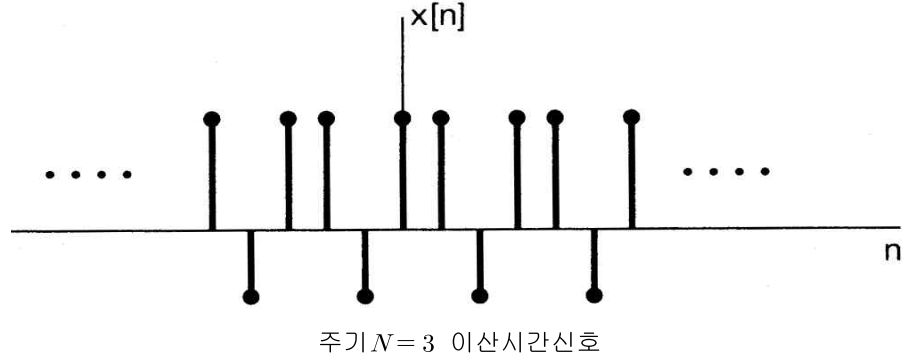
주기 신호(periodic signal): \(x(t) = x(t + T)\) (주기 \(T\)), \(x[n] = x[n + N]\) (주기 \(N\))
- 마지막으로 시간 축 \(t\)에 대하여
우함수(even function) 신호와기함수(odd function) 신호에 대하여 알아보도록 하겠습니다. 우함수(even function) 신호: \(x(t) = x(-t)\), \(x[n] = x[-n]\), 세로축(y축) 대칭인 함수기함수(odd function) 신호: \(x(t) = -x(-t)\), \(x[n] = -x[-n]\), 원점 대칭인 함수
- 임의의 신호 \(x(t)\)에 대하여 다음과 같이 계산을 적용하였을 때, 우함수와 기함수를 만들 수 있습니다.
우함수: \(x_{e}(t) = [x(t) + x(-t)] / 2\), 즉 원래 함수와 y축 대칭인 우함수를 더한 후 2로 나누면 우함수가 생성됩니다.기함수: \(x_{o}(t) = [x(t) - x(-t)] / 2\), 즉 원래 함수와 원점 대칭인 기함수를 더한 후 2로 나누면 기함수가 생성됩니다.
- \[x(t) = x_{e}(t) + x_{o}(t)\]
- \[x(-t) = x_{e}(t) - x_{o}(t)\]
- 위 식을 통하여 알 수 있는 점은 임의의 함수는 우함수와 기함수의 합으로 표현할 수 있다라는 점입니다.
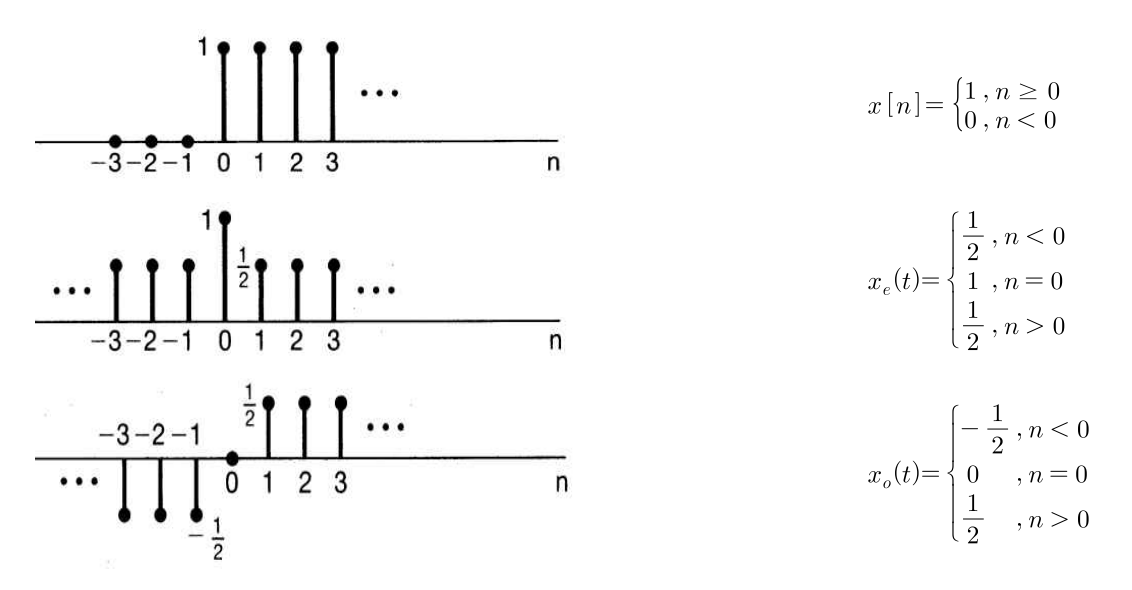
- 첫번째 신호가 원 함수의 신호이고 두번째 신호는
우함수(\(x(t) = x_{e}(t) + x_{o}(t)\)) 형태로 나타낸 것입니다. 세번째신호는기함수(\(x(-t) = x_{e}(t) - x_{o}(t)\))의 형태로 나타내었습니다. - 위 예제에서 우함수와 기함수 형태의 이산 시간 신호를 각 시간 단위 별로 더하면 기존의 \(x(t)\)로 나타내집니다. 즉, 임의의 함수를 우함수와 기함수의 합으로 표현한 것 입니다.
지수 신호와 정현파 신호
- 앞에서 신호의 정의에 대하여 살펴 보았습니다. 이번에는 신호의 기본이 되는
sin,cos정현파 신호와 이를 지수 형태로 나타내는 지수 신호에 대하여 다루어 보도록 하겠습니다.

- 위 식의
Re는 실수값을 의미하고Im는 허수값을 의미합니다. 즉, 지수 형식으로 표현된 값을 실수값을 취하면cos가 되고 허수값을 취하면sin이 됨을 뜻합니다. 왜냐하면 지수함수가sin,cos으로 분해가 되는오일러 공식을 따르기 때문입니다.

- 위 오일러 공식에 따라 지수 함수 \(e^{\pm j\theta} = \cos{\theta} \pm j\sin{\theta}\) 와 같이 전개되므로 이 원리를 이용하여 \(A\cos{w_{0}t + \phi} = A \ Re\{e^{j(w_{0}t + \phi)} \}\)와 \(A\sin{w_{0}t + \phi} = A \ Im\{e^{j(w_{0}t + \phi)} \}\)를 유도할 수 있습니다.
- 오일러 공식에 의한 주기 함수와 cos, sin 함수의 관계와 더불어
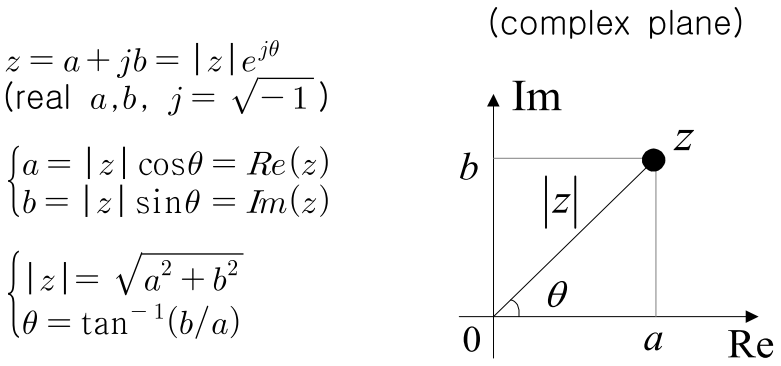
복소 평면상에서의 cos, sin 함수의 관계를 살펴 보겠습니다. - 위 그래프에서 가로축은 실수부이고 세로축은 허수부입니다. 이 때 \(z\)를 직각 좌표계와 극 좌표계로 나타낼 수 있습니다.
- \(z = a + jb = \vert z \vert e^{j\theta}\) (가운데 식이 직각 좌표계이고 지수 함수 형태의 식이 극 좌표계입니다.)
- 그리고 \(z\)의 크기인 절대값은 삼각형의 대각선인 \(\vert z \vert\)가 되는 것을 알 수 있습니다. 이 값을 이용하여 cos, sin 함수를 나타내 보겠습니다.
- \[a = \cos{\theta} \vert z \vert\]
- \[b = \sin{\theta} \vert z \vert\]
- \[z = a + jb = \cos{\theta} \vert z \vert + j(\sin{\theta} \vert z \vert) = \vert z \vert (\cos{\theta} + j \sin{\theta}) = \vert z \vert e^{j\theta} \ \ \because \text{euler formula}\]
- 이와 같은 방법으로 \(z\)를 직각 좌표계와 극 좌표계 방식으로 나타낼 수 있습니다.
- 다음으로 정현파 신호에 대한 성질을 살펴보도록 하겠습니다.
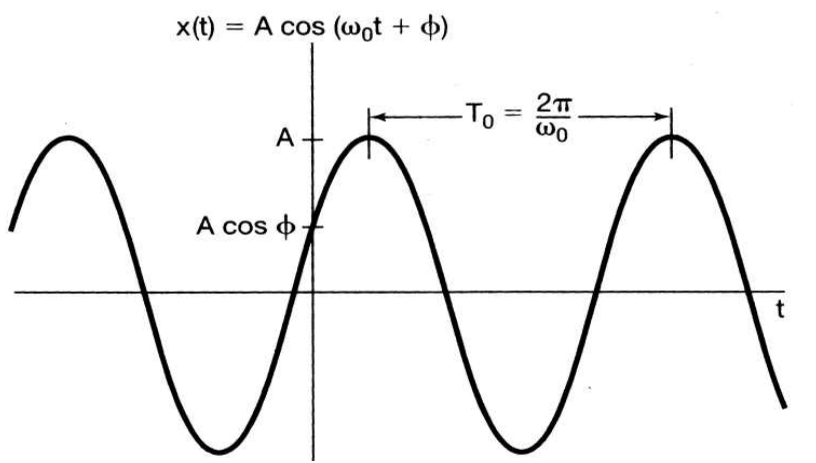
주기(period), 1 사이클 시간 (단위 : sec) : \(T_{0} = \frac{2 \pi}{w_{0}}\)주파수(frequency), 1 초 내 싸이클 수 (단위 : Hz) : \(f_{0} = \frac{1}{T_{0}}\)각 주파수(radian frequency): \(w_{0} = 2 \pi f_{0}\)진폭(amplitude), 또는 peak : \(A\)위상(phase)(단위 : radian) : \(\phi\)
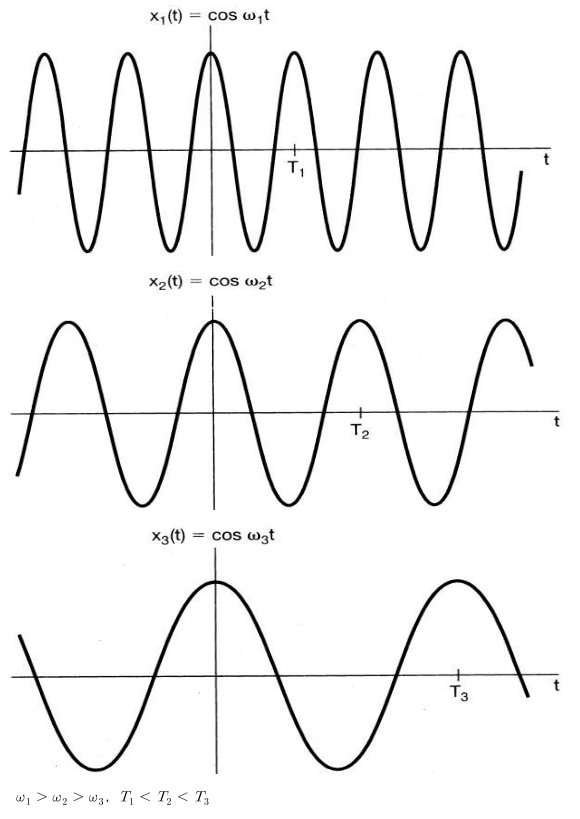
- 위 그래프를 살펴보면 \(T_{1} \lt T_{2} \le T_{3}\)이므로 주기는 점점 늘어나고 \(w_{1} \gt w_{2} \gt w_{3}\) 이므로 주파수는 점점 감소하는 것을 확인할 수 있습니다.
단위 임펄스 및 단위 계단 함수
- 이번에는 가장 기본적인 신호인
단위 임펄스 함수와단위 계단 함수에 대하여 알아보도록 하겠습니다. 이 함수도연속 시간과이산 시간각각의 표현 방법이 다르므로 이를 분리하여 배워보겠습니다.
- 먼저
이산 시간에 대한 두 함수의 의미를 살펴보겠습니다. - 이산 시간에서
단위 임펄스 (단위 샘플) 함수는 다음과 같습니다.
- \[\delta[n] = \begin{cases} 0, \ n \neq 0 \\ 1, \ n = 0 \end{cases}\]
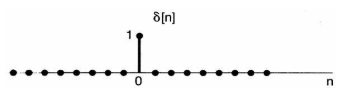
- 단위 임펄스 함수의 기본형은 위 식을 따르고 앞에서 다룬 독립 변수 시간의 변화에 따라서 다양하게 변형할 수 있습니다.
- 예를 들어 \(2 \delta[n], 2\delta[n-4], 2\delta[n+2]\) 등과 같이 시간 변위 및 배율을 줄 수 있습니다.
- 다음은 이산 시간에서의
단위 계단(Unit Step) 함수에 대하여 알아보도록 하겠습니다.
- \[u[n] = \begin{cases} 0, \ \ n \lt 0 \\ 1, \ \ n \ge 0 \end{cases}\]
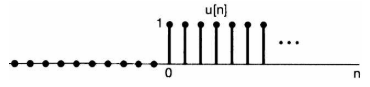
- 위 함수는 단위 임펄스 함수의 확장이라고 볼 수 있습니다. 따라서 두 함수는 다음 식과 같은 관계를 가집니다.

- 먼저 위 식은 단위 계단 함수를 이용하여 단위 임펄스 함수를 표현한 예시 입니다. \(u[n]\)과 \(u[n-1]\)을 이용하면 단위 임펄스 함수를 만들 수 있습니다.
- 이후에 이와 관련된 식을 다룰 예정이며 이를
차분 방정식이라고 합니다.

- 두번째 식은 단위 임펄스 함수의 성질을 이용한 것입니다. 즉, 하나의 값 이외에는 모두 0으로 만들어 버리는 성질을 이용한 것입니다.
- 임의의 함수 \(x[n]\)에 대하여 \(x[n_{0}]\) 이외의 값은 단위 임펄스 함수와 곱해지면 모두 0이 되어 버리기 때문에 단위 임펄스 함수의 형태로 나타나 집니다. 예를 들어 \(x[n]\delta[n - (-4)] = x[4]\delta[n - (-4)]\)가 됩니다.
- 이번에는
연속 시간에서의 임펄스 함수와 단위 계단 함수에 대하여 알아보도록 하겠습니다. - 먼저
임펄스 함수는 다음과 같은 식을 가집니다.

- 이산 시간 케이스와 다르게 \(t = 0\) 지점에서의 값은 무한대를 가지고 전체 범위에서 적분을 하였을 때, 면적의 넓이가 1이 되도록 위 식을 따릅니다.
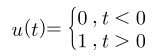
- 반면
계단 함수의 경우 \(t > 0\) 인 경우에는 함수값이 1이 됩니다.
- 이산 시간의 임펄스 함수와 계단 함수는 차분 방정식을 이용하여 두 신호의 관계를 나타내었습니다. 연속 시간에서의 두 함수는 미분 방정식을 이용하여 두 신호의 관계를 나타낼 수 있습니다.
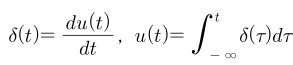
- 이 관계는 이산 시간 신호의 경우와 비교하면서 살펴보면 이해하기 수월합니다. 임펄스 함수는 계단 함수를 \(dt\)로 미분한 관계를 가지고 반대로 계단 함수는 임펄스 함수를 적분한 관계를 가집니다.

- 위 관계식 또한 임펄스 함수가 특정 시간 이외에는 모든 값이 0이 되는 점을 이용하여 정의되었습니다.
- 연속 시간 신호의 함수를 다른 관점에서 다시 한번 살펴보도록 하겠습니다.
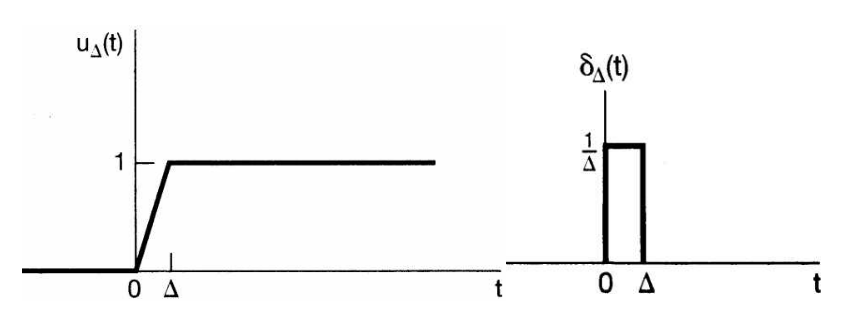
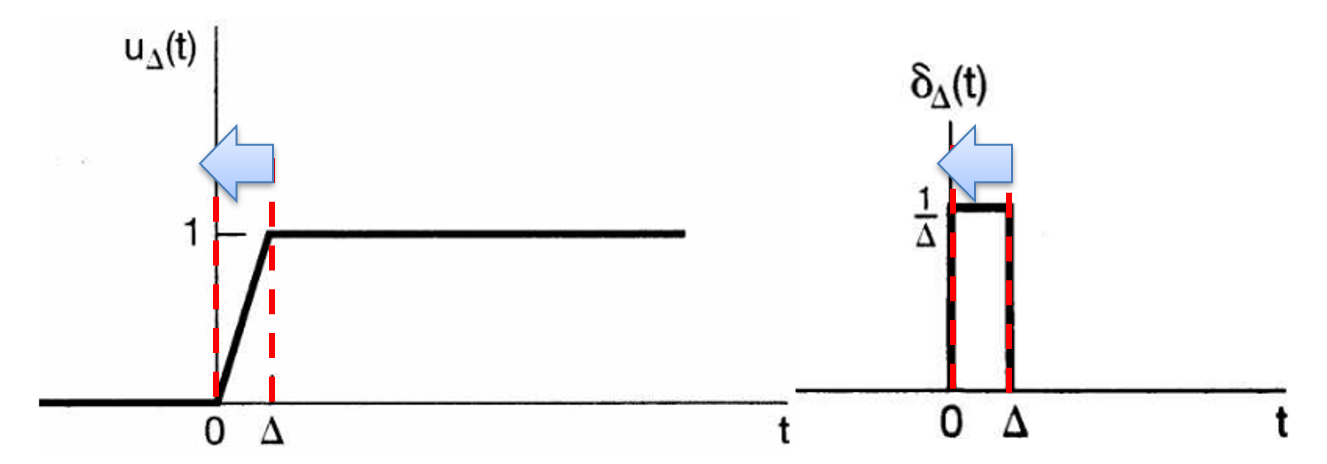
- 왼쪽 그림은 앞에서 살펴본 계단 함수에서 선형적으로 값을 증가하는 부분을 추가한 형태입니다.
- 이와 같은 계단 함수를 임펄스 함수에 대응하면 오른쪽 그림과 같이 나타나게 됩니다. 이 이유를 살펴보도록 하겠습니다.
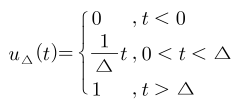
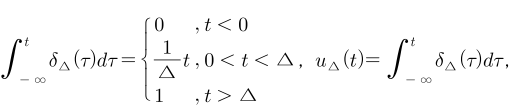
- 앞의 그림의 계단 함수를 구간 별 수식으로 나타내면 위 수식과 같습니다. 계단 함수 → 임펄스 함수로 변환하려면 미분을 이용하여 나타내었습니다. 이번에도 같은 방법으로 계단 함수를 임펄스 함수로 변환해 보도록 하겠습니다. 먼저 \(t < 0\) 때와 \(t > \Delta\)인 경우 상수값이므로 미분을 하면 0이 되고 \(0 < t < \Delta\) 범위의 값 \(\frac{1}{\Delta}t\)를 미분하면 \(\frac{1}{\Delta}\)가 됩니다. 이를 이용하면 임펄스 함수는 다음과 같습니다.
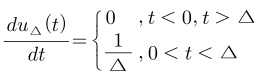
- 앞의 설명에 따라 임펄스 함수 \(\delta_{\Delta}(t)\)는 위 식과 같이 정의할 수 있습니다.
- 이번에는 반대로 임펄스 함수 → 계단 함수로 변환해 보도록 하겠습니다. 이산 시간 케이스에서 다룬 바와 같이 이번에는 적분을 통하여 변환하겠습니다.
- 이번에 살펴 본 \(\Delta\)를 추가한 계단 및 임펄스 함수에서 \(\Delta\)를 0으로 수렴시키면 어떻게 될까요?

- 위 그림과 수식같이 \(\Delta = 0\)이 되면서 처음 다룬 연속 시간 신호의 임펄스 함수와 계단 함수와 같은 형태로 변경됩니다.
연속 시간 및 이산 시간 시스템
- 앞에서
시스템이란 신호를 처리하는 소프트웨어나 하드웨어를 뜻한다고 설명하였습니다.
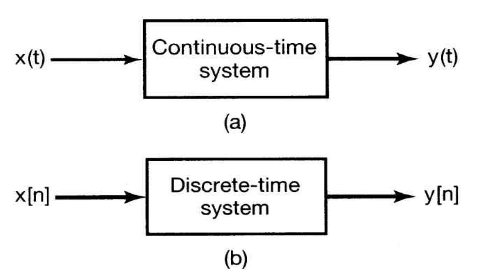
- 시스템의 가장 큰 범주로는 연속 시간 시스템 (Continuous Time System)과 이산 시간 시스템 (Discrete Time System)이 존재합니다.
- 그리고 각각의 시스템들을 연결하는 다양한 종류의 연결이 있습니다.

- 위 연결은 직렬 연결이라고 하며 시스템이 연속적으로 연달아 연결되어 있습니다.
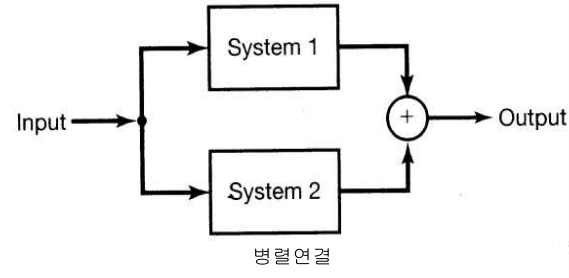
- 위 연결은 병렬 연결 입니다.
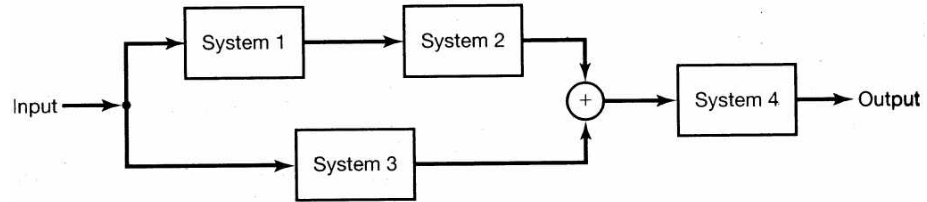
- 위 연결은 직렬과 병렬이 혼합되어 있는 방식입니다.
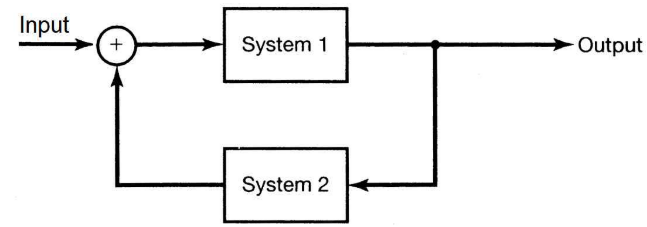
- 위 연결 방식은 피드백 방식으로 출력이 다시 입력으로 연결되는 방식입니다.
기본적인 시스템 특성
- 각 시스템은 연속 및 이산 시간 특성 뿐 아니라 다른 특성들에 의해서 구분되어 지기도 합니다.
- 먼저
메모리 없는 (memoryless)시스템은 어떤 시간의 출력이 동일한 그 시간의 입력에 의해서만 결정되는 시스템을 뜻합니다. 이를항등 시스템이라고도 합니다.

- 반면
메모리가 있는 시스템은 어떤 시간의 출력이 그 시간이나 과거 시간의 입력과 시스템 상태에 의해서 결정되는 시스템을 뜻합니다.
- 예를 들어 위 식과 같은
지연기가 있습니다.

- 또는 위 식과 같은
누산기가 있습니다.