CCW(counter clockwise)
2019, Nov 01
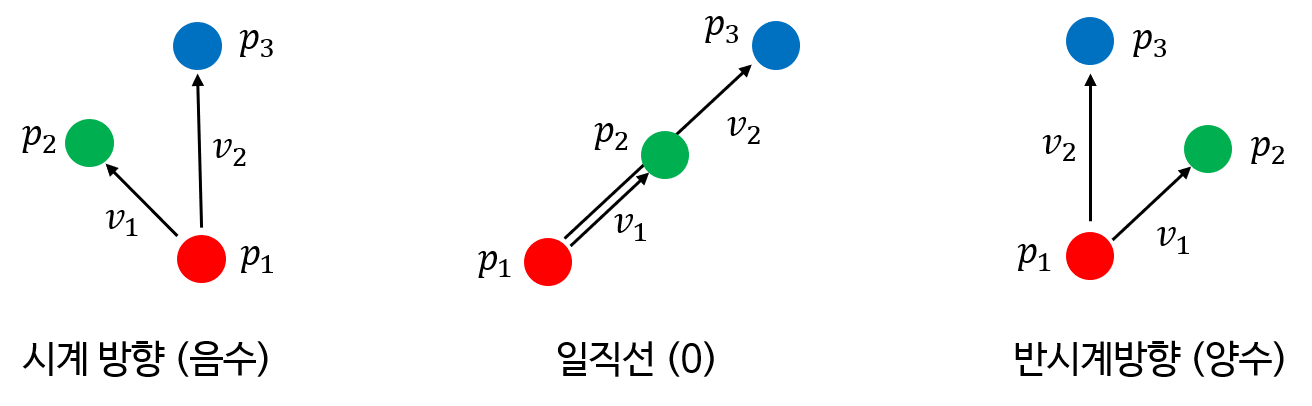
- 어떤 두 벡터의 방향 관계성을 보기 위해서는 어떤 벡터 \(v_{1}\)에서 또 다른 벡터 \(v_{2}\)로 회전 시 시계 방향(clockwise)으로 회전 하는 지 , 반시계 방향(counter clockwise)으로 회전 하는 지 를 통하여 알 수 있습니다.
- 또는 세 점의 방향 관계성이라고 생각할 수도 있는 것이 세 점 \(p_{1}, p_{2}, p_{3}\)이 있다고 하였을 때, \(v_{1}\)이 \(p_{1}, p_{2}\)를 이은 벡터이고 \(v_{2}\)가 \(p_{2}, p_{3}\)를 이은 벡터라고 생각하면 세 점이 어떤 방향으로 위치해 있는 지 알 수 있습니다.
- 이 관계는
벡터의 외적을 통하여방향성을 확인 할 수 있는데 외적에 관한 자세한 내용은 다음 링크를 확인하시기 바랍니다.- 참조 : https://gaussian37.github.io/math-la-cross-product/
- 벡터의 외적은 3차원 좌표계에서 계산할 수 있습니다. 즉, 반드시 한 개의 벡터에 3차원의 정보가 있어야 한다는 뜻입니다.
- 예를 들어 두 벡터가 3차원에 존재한다면 \(\bar{v}_{1} = (x_{1}, y_{1}, z_{1})\)과 \(\bar{v}_{2} = (x_{2}, y_{2}, z_{2})\)가 있고 이 두 벡터의 외적을 통하여 \(v_{1}\)이 \(v_{2}\)에 대하여 시계방향에 있는지 반시계방향에 있는지 확인할 수 있습니다.
- 만약 2차원에 존재하는 점이라면 z축의 값을 0으로 두면 됩니다. 즉, \(\bar{v}_{1} = (x_{1}, y_{1}, 0)\)과 \(\bar{v}_{2} = (x_{2}, y_{2}, 0)\)로 하여 한 축을 무시해 버리면 2차원 좌표에서도 벡터의 외적을 적용할 수 있습니다.
- 그러면 외적의 값에 따라서 어떻게 방향을 구분할 수 있을까요?
- 외적의 결과값이
음수이면 시계방향이고양수이면 반시계방향입니다.0이면 일직선 방향입니다. 현재 알고리즘의 이름이 CCW(반시계방향)이므로 양수이면 반시계방향이라는 것만 일단 숙지하시면 도움이 됩니다.
- 두 벡터 \(v_{1}\)과 \(v_{2}\)의 벡터곱(외적)을 구해보겠습니다.
- 외적을 구할 때 다음을 이용하겠습니다.
- \[p_{1} \times p_{2} = \text{det} \begin{pmatrix} x_{1} & x_{2} \\ y_{1} & y_{2} \end{pmatrix} = x_{1}y_{2} - x_{2}y_{1} = -p_{2} \times p_{1}\]
- \[v_{1} \times v_{2} = (x_{2} - x_{1})(y_{3} - y_{1}) - (x_{3} - x_{1})(y_{2} - y_{1})\]
- 위 코드의
ccw함수는 세 점 \(p_{1}, p_{2}, p_{3}\)의 좌표값을 입력으로 넣으면 출력으로 1, 0, -1을 반환해 줍니다. - 결과값은 \(p_{1}, p_{2}\)가 이루는 벡터를 기준으로 \(p_{1}, p_{3}\)가 이루는 벡터의 위치를 나타내고 1은 반시계 방향(counter clockwise), 0은 겹치는 방향 (collinear), -1은 시계 방향(clockwise)이 됩니다.
- 아래 코드는 점 3개를 입력으로 받지 않고 2개의 벡터를 입력으로 받는 코드입니다.