가우시안 프로세스 (Gaussian Process) 내용 정리
2021, Jul 17
- 참조 : https://www.edwith.org/bayesiandeeplearning/
- 참조 : https://students.brown.edu/seeing-theory/
- 참조 : https://youtu.be/9NeDYW9BfpQ
- 이 글은 edwith의 베이지안 딥러닝 강의를 요약한 내용입니다.
- 이 글의 학습 목적은 베이지안 딥러닝과 딥러닝에서의 Uncertainty를 이해하기 위하여 배경 지식을 쌓기 위함입니다.
목차
-
Gaussian Process 퀵하게 알아보기
-
Gaussian Process
-
Weight Space View
-
Function Space View
-
Gaussian process latent variable model (GPLVM)
-
Gaussian process Application
-
Appendix : 배경지식 설명
Gaussian Process 퀵하게 알아보기
- classification이나 regression과 같은 supervised learning은
parametric 모델을 통해 해결되고 있습니다. 여기서 말하는parametric 모델은 모델 학습 동안 training data의 정보를 모델과 그 모델의 파라미터를 통해 표현하는 방법을 의미합니다. - 이러한 모델들은 설명 가능하다는 장점을 가지나 복잡한 데이터 셋에서는 제대로 작동하기 힘든 단점이 있습니다. 이러한 단점을 개선하기 위하여
SVM (Support Vector Machine)이나GP (Gaussian Process)와 같은kernel 기반 모델이 등장하게 되었습니다.
- 먼저
GP에 대하여 알아보면 임의의 집합 \(S\) 가 있을 떄,GP는 \(S\) 에 대하여jointly gaussian distribution을 따르는 random variable의 set을 의미합니다. 식으로 표현하면 다음과 같습니다.
- \[f \sim GP(m, k)\]
- \[m \text{ : mean function}, k \text{ : covariance function}\]
- 일반적인 가우시안 분포의 꼴은 다음과 같습니다.
- \[X \sim N(\mu, \sigma^{2})\]
- 가우시안 프로세스와 가우시안 분포의 차이를 보면 가이시안 프로세스는 평균과 분산에 function형태가 들어간 반면 가우시안 분포는 평균과 분산에 특정 값이 들어간다는 차이가 있습니다.
- 아래 내용은 예시를 들어
GP에 사용되는 파라미터 함수 \(m, k\) 사용하는 방법에 대하여 다루어 보겠습니다.
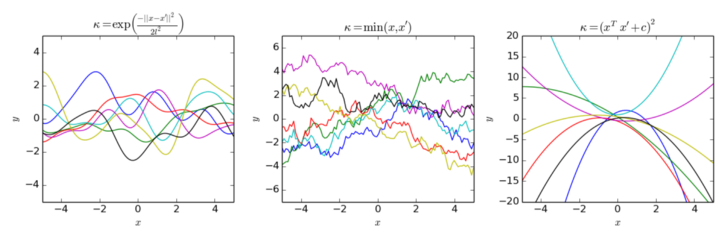
- \[f \sim GP(m, k)\]
- \[m(x) = \frac{1}{2} x^{2}\]
- \[k(x, x') = \exp{( -\frac{1}{2} (x - x')^{2} )}\]
- 이러한 경우 가우시안 분포 처럼 아래와 같이 표현할 수 있습니다.
- \[\mu_{i} = m(x_{i}) = \frac{1}{2} x_{i}^{2}, \ \ i = 1, 2, \cdots n\]
- \[\sigma_{ij} = k(x_{i}, x_{j}) = \exp{(-\frac{1}{2}(x_{i} - x_{j})^{2} )}, \ \ i,j = 1, 2, \cdots n\]
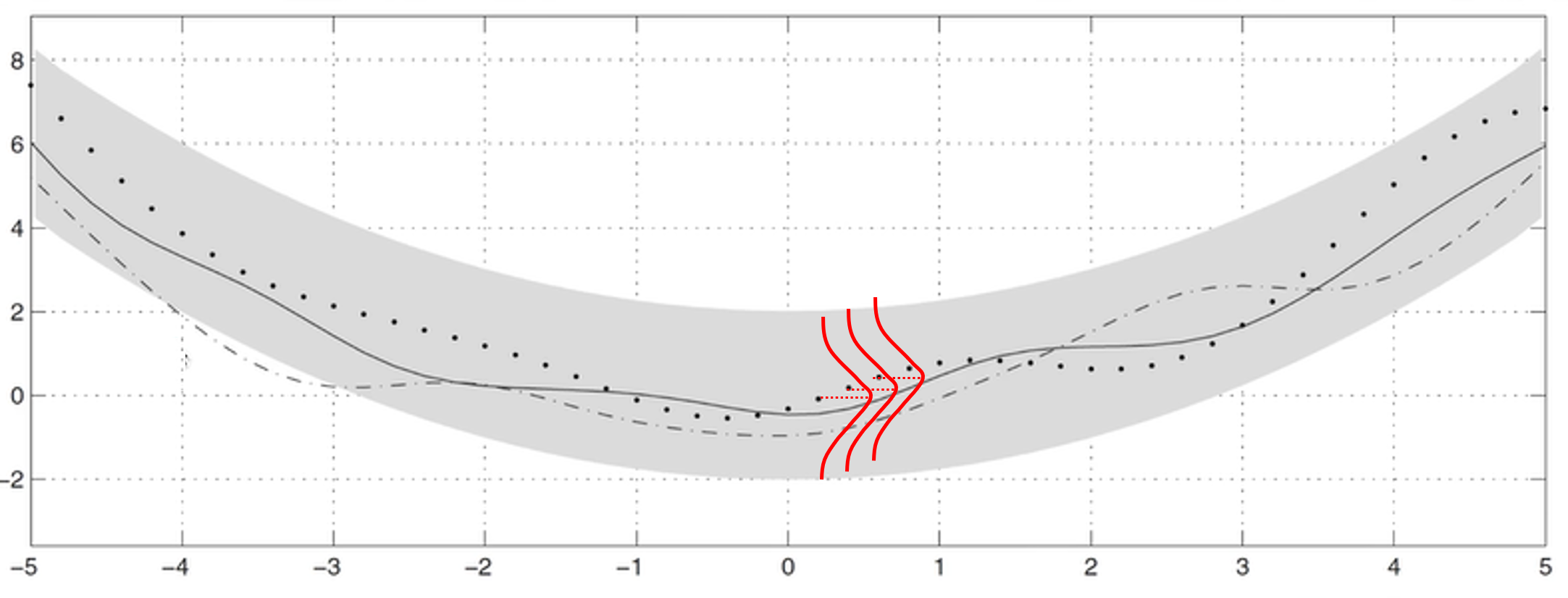
- 위 그림과 같이 함수 \(m, k\) 에 의해 각 점에서 가우시안 분포를 가지게 되면 음영으로 표시된 것과 같이 영역을 가지게 됩니다. 즉, 단순히 특정 데이터 하나가 아닌 확률 분포를 가지게됨을 알 수 있습니다.
- 이와 같은 가우시안 프로세스 과정은
베이지안 인퍼런스과정에서 사용될 수 있습니다. 먼저 베이즈 이론을 다시 간략하게 살펴보면 다음과 같습니다.
- \[\color{red}{P(\theta \vert x)} = \frac{\color{green}{P(x \vert \theta)} \color{blue}{P(\theta)}{P(x)}\]
- 위 식에서 빨간색이 베이즈 이론에서 구하고자 하는
posterior에 해당하고 초록색은likelihood그리고 파란색은prior에 해당합니다.prior가 \(\theta\) 라는 모수를 가지는 확률 분포라 하고 최종적으로 구하고자 하는posterior는 데이터 \(x\) 가 주어졌을 때, \(\theta\) 모수에 대한 확률 분포를 의미합니다. 반면likelihood는 \(\theta\) 모수가 주어졌을 때, 주어진 데이터 \(x\) 를 얼만큼 잘 표현하는 지 나타내는 수치를 의미합니다. 베이지안 인퍼런스과정에서는 앞에서 구한GP를prior로 사용하고likelihood는 데이터 \(x\) 가 있으면 구할 수 있기 때문에 최종 목적인posterior를 구할 수 있다는 컨셉입니다.
Gaussian Process
Weight Space View
Function Space View
Gaussian process latent variable model (GPLVM)
Gaussian process Application
Appendix : 배경지식 설명
- 아래는 이 글에서 설명할
Gaussian Process를 이해하기 위한 배경지식으로 스킵하셔도 됩니다. - 먼저 gaussian process에 대한 개념을 알아보기 이전에
random variable,random process등과 관련한 내용에 대하여 알아보도록 하겠습니다.
random variable
- 먼저
random variable에 대하여 알아보겠습니다. 많은 분들이 기존 통계학을 공부하실 때 이미 학습하신 내용입니다.
- 먼저
Random의 의미를 살펴보면sample space에서 한 개의 원소를 뽑는 것을 의미합니다. - 이 때,
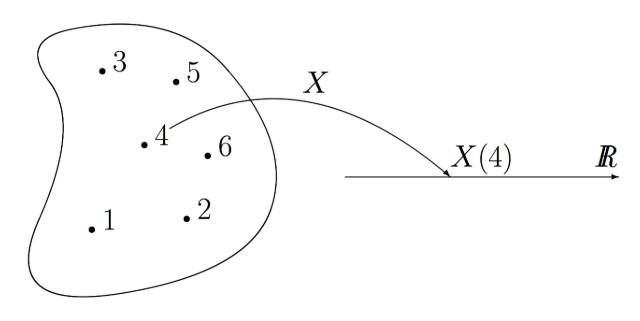
random variable은 임의의 프로그래밍 언어에서 랜덤값을 추출할 때, 그 랜덤 값이 어떤 방식으로 추출되는 지 모델링 되는 것을random variable이라고 말할 수 있습니다. - 위 그림에 빗대어 보면 sample space로 부터 실제 관측한 값을 뽑아 내는
함수가 random variable 입니다. 확률과 비교해 보면 확률은 sample space에서 영역(면적)을 만들어 낼 수 있는subset인 반면에 random variable은 sample space에서 어떻게 원소를 추출할 지 또는 어떤 subset으로 원소를 배정할 지 정의되어 있는함수라고 이해하면 됩니다. - 추가적으로
Random Experiment라는 용어는random variable을 이용하여 어떤 값을 추출하였을 때, 그 값을 실제 확인한 결과를 뜻합니다. - 이와 같이 가상의 sample space에서 random variable을 통하여 원소를 뽑고 확인하는 이 전체 과정을
realization또는sampling이라고 합니다.
- \[\sum P(X = x_{i}) = 1 (x_{i} : i = 1, 2, ...)\]
- 위 식과 같은 discrete random variable을 해석하면 \(X\) 라는 random variable이 있는데 그 결과 값이 \(x_{i}\)가 나올 면적의 크기라고 말할 수 있습니다.
- \[E[X] = \begin{cases} \sum_{x} x p(x) \ \ \ \ \text{discrete} X \\ \int_{-\infty}^{\infty} x f(x) dx \ \ \ \ \text{continuous} X \end{cases}\]
- random variable \(X\) 를 이용하여 위 식과 같이 정의하였을 때, 잘 알려진 바와 같이
expectation이라고 합니다. - 위 식의 직관적인 의미는 random variable \(X\) 를 여러번 sampling 하였을 때, 평균적인 기댓값 (expectation)을 뜻합니다. random variable의 의미와 연관지어 생각하면 의미를 다시 느껴볼 수 있습니다.
- 또 다른 식으로 \(E(X \vert Y)\) 즉,
conditional expectaion에 대하여 간단히 알아보겠습니다. - 이 식에서 전제 조건은 random variable \(X\) 의 expectation인 \(E(X)\) 가 \(E(X) = \int x f(x) dx\) 로 정의되고 이 값이 특정 분포(ex. 가우시안 분포)로 정해져 있다고 하면 \(X\)는 deterministic variable 이 된다라는 것입니다.
- 이 때, \(Y\) 가 random variable이라고 하면 \(E(X \vert Y )\) 또한 random variable이 된다는 점입니다.
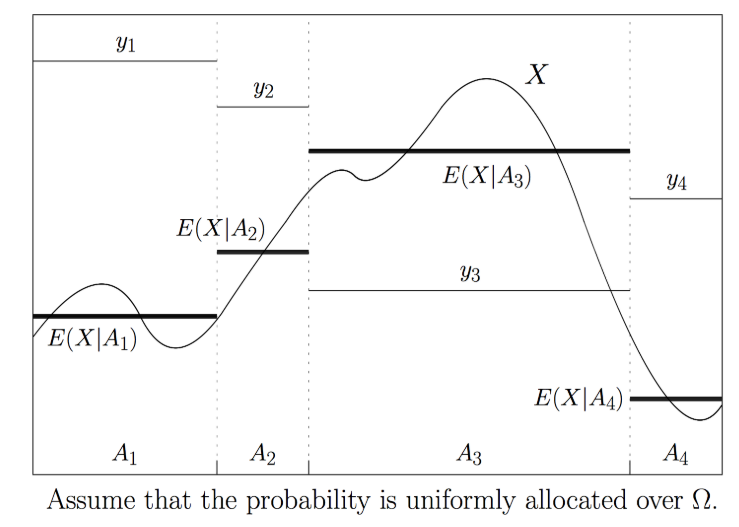
- 위 그래프에서 \(X\)는 위 그림과 같은 고정된 분포를 가지므로 deterministic variable이 됩니다.
- 이 때, random variable \(Y\) 는 4개의 값 \(y_{1}, y_{2}, y_{3}, y_{4}\) 로 추출될 수 있습니다. 즉, 확률 관점으로 보았을 때, sample space에 4개의 subset에 있고 4개의 subset의 확률 값을 모두 합하면 1이 됩니다.
- 이 각각의 \(Y\) 의 subset 내부에서 \(X\) 가 가지는 exectation을 계산하는 것이
conditional expectation이 됩니다. \(X\) 는 continuous 하여 많은 값을 가지게 되지만 \(Y\) 라는 random variable이 sample space를 굉장히 크게 나누어서 subset을 가졌기 때문에 \(X\) 도 영향을 받게 됩니다. (즉, conditional 하게 됩니다.)
moment
- 어떤 확률 분포를 나타낼 때 대표적인 값으로 기댓값 즉 평균값을 많이 사용합니다. 물론 평균값에 의해 왜곡되는 것이 많다는 것을 알고 있음에도 불구하고 대표적으로 사용하고 있습니다.
- 평균이라는 값은
n-th moment중 1차에 해당하며2-th moment는 흔히 아는variance이며 3차는skewness, 4차는kurtosis라고 합니다. - 어떤 두 분포가 비슷한 지 확인 할 때, 쉽게 비교할 수 있는 방법으로 두 분포의
n-th moment가 같은 지 확인하는 방법을 사용하곤 합니다. 이와 같은 방법을 이용하면 단순히 평균값을 통해 왜곡되는 문제를 보정하여 비교할 수 있습니다.