Direct Linear Transformation
2021, Feb 15
- 참조 : http://www.cs.cmu.edu/~16385/s17/Slides/10.2_2D_Alignment__DLT.pdf
- 참조 : https://gaussian37.github.io/vision-concept-image_transformation/
목차
DLT (Direct Linear Transformation) 개념
- 이번 글에서는
Homography적용 시 4개의 점을 이용하여 3 X 3 Homography 행렬을 만드는 방법에 대하여 다루어 보도록 하겠습니다.

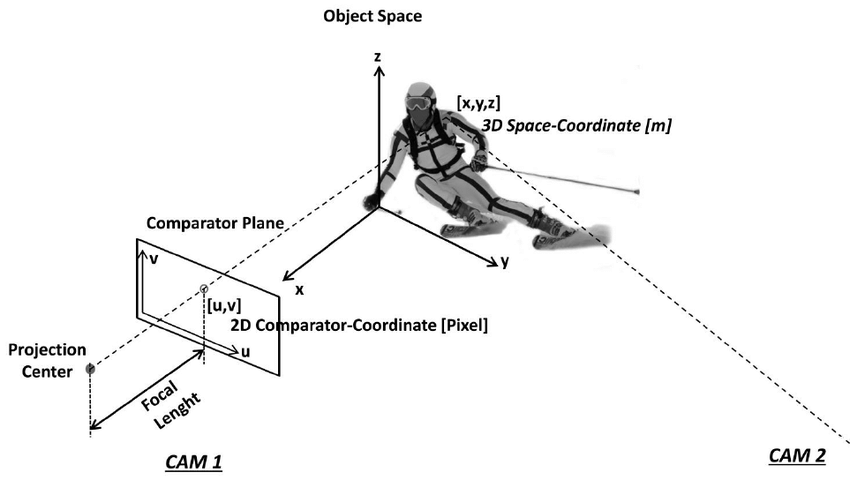
- 이미지 변환을 할 때, 위 그림과 같이 왼쪽의 이미지를 오른쪽 이미지와 같이 기하학적 변환을 적용하곤 합니다.
- 이 때, 동일 평면 (coplanar) 상의 점들을 3차원 변환을 하기 위하여
Homography(또는 Perspective Transformation, Projective Transformation)방법을 사용합니다. - 이번 글에서는
Homography에 대한 자세한 개념 보다는 두 이미지에서 대응되는 4개의 점을 이용하여 3 X 3 Homography를 구하는 방법에 대하여 다루어 보겠습니다. Homography에 대한 개념은 아래 링크에서 확인하시기 바랍니다.
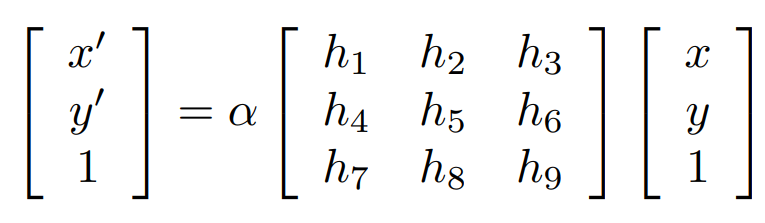
- \[\begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} = \alpha H \begin{bmatrix} x \\ y \\ 1 \end{bmatrix}\]
- \[H = \begin{bmatrix} h_{1} & h_{2} & h_{3} \\ h_{4} & h_{5} & h_{6} \\ h_{7} & h_{8} & h_{9} \end{bmatrix}\]
- 먼저 행렬
H를 Homography 행렬이라고 합니다. 위 식의 좌변과 우변의 \(x, y\) 쌍을 대응해 주기 때문입니다. H에서 \(h _{9}\)는 스케일과 관련된 값으로 1 또는 사용할 스케일 값을 사용합니다. 즉, \(h_{i}\)해를 구할 때, 크게 고려하지 않아도 됩니다.- 따라서 8개의 파라미터 \(h_{1}, h_{2}, \cdots h_{8}\)을 구하기 위하여 8개의 식이 필요합니다. 즉, \((x, y)\)로 이루어진 4개 점을 통하여 8개의 식을 얻고 8개의 식을 이용하여 파라미터 8개를 연립방정식을 통하여 구할 수 있습니다.
- 먼저 Homography의 파라미터를 구하기 위하여 위 식을 homogeneous linear equation 형태로 변형한 뒤 해를 구하는 방법을 사용하도록 하겠습니다.
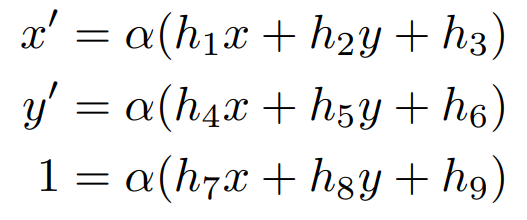
- 우변의 행렬을 전개하여 위 식과 같이 3개의 식으로 풀어 보겠습니다. 그 다음, 좌변이 1인 세번째 식을 첫번째, 두번째 식에 나누어 보겠습니다.

- 세번째 식으로 나눈 식에서 분모가 없도록 정리를 하면 위 식과 같이 2개의 식으로 정리할 수 있습니다.
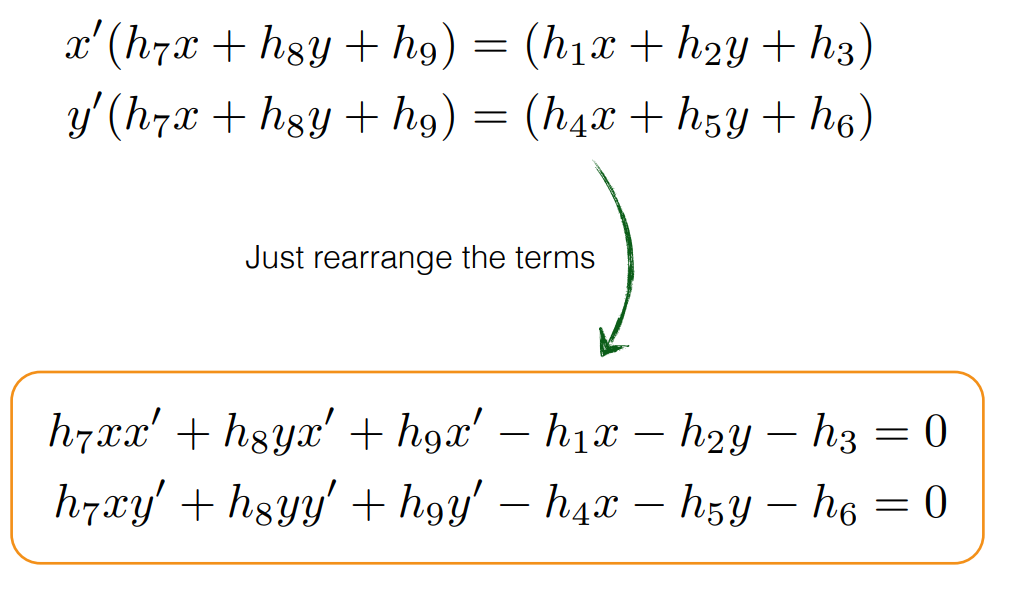
- 이 때, 우변이 0이 되도록 좌변과 우변을 정리하면 위 식과 같이 정리할 수 있습니다. 이제 우변을 0으로 만들었으므로 homogeneous 형태의 식을 만들 수 있습니다.
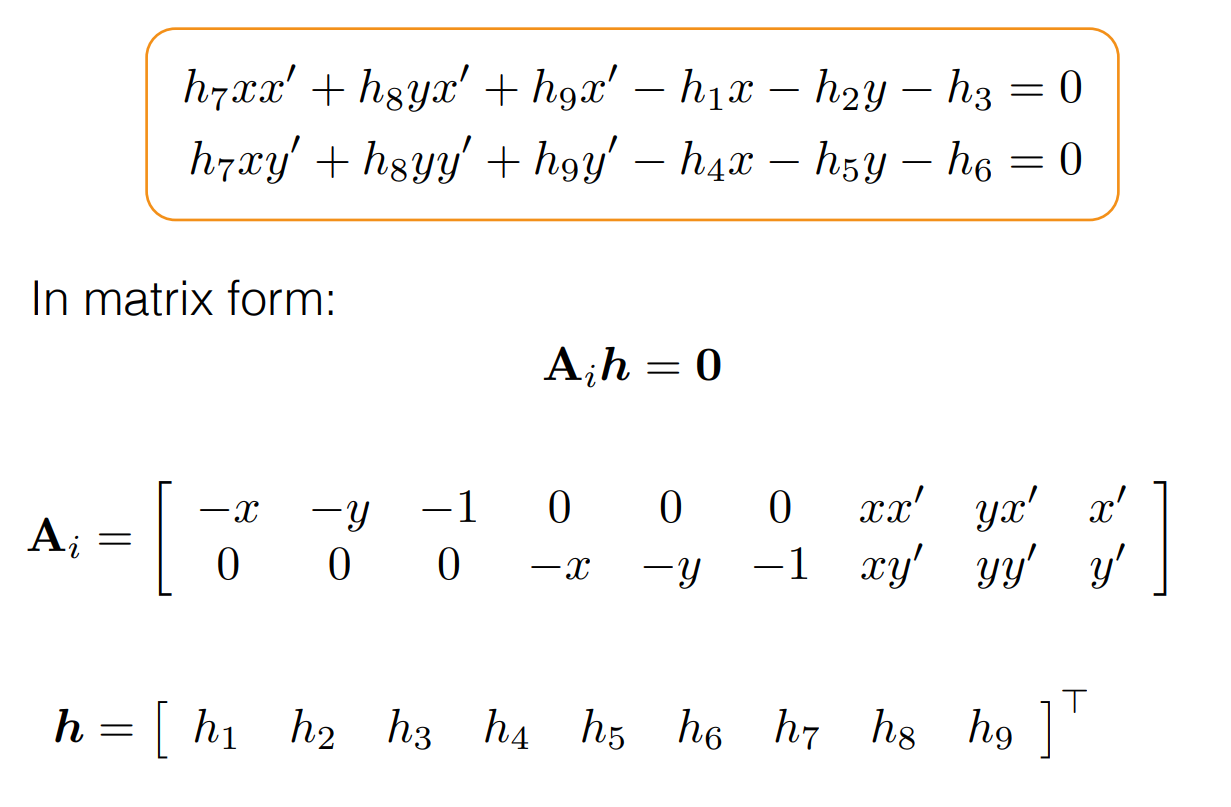
- 위 식에서 \(A_{i}\)는 (2 X 9) 크기의 행렬이고 \(h\)는 (9 X 1) 크기의 행렬이므로 연산 결과 (2 X 1) 크기의 영행렬을 얻을 수 있습니다.
- 이를 확장하여 4개의 좌표 쌍을 사용한다면 \(A_{1}, A_{2}, A_{3}, A_{4}\)를 사용하여 (8 X 9) 크기의 행렬 \(A\)를 만들 수 있고 \(h\)는 (9 X 1) 크기의 행렬이므로 우변은 (8 X 1) 크기의 행렬을 만들 수 있습니다.
- \[Ah = 0\]
- \[\begin{bmatrix} -x_{1} & -y_{1} & -1 & 0 & 0 & 0 & x_{1}x_{1}' & y_{1}x_{1}' & x_{1}' \\ 0 & 0 & 0 & -x_{1} & -y_{1} & -1 & x_{1}y_{1}' & y_{1}y_{1}' & y_{1}' \\ -x_{2} & -y_{2} & -1 & 0 & 0 & 0 & x_{2}x_{2}' & y_{2}x_{2}' & x_{2}' \\ 0 & 0 & 0 & -x_{2} & -y_{2} & -1 & x_{2}y_{2}' & y_{2}y_{2}' & y_{2}' \\ -x_{3} & -y_{3} & -1 & 0 & 0 & 0 & x_{3}x_{3}' & y_{3}x_{3}' & x_{3}' \\ 0 & 0 & 0 & -x_{3} & -y_{3} & -1 & x_{3}y_{3}' & y_{3}y_{3}' & y_{3}' \\ -x_{4} & -y_{4} & -1 & 0 & 0 & 0 & x_{4}x_{4}' & y_{4}x_{4}' & x_{4}' \\ 0 & 0 & 0 & -x_{4} & -y_{4} & -1 & x_{4}y_{4}' & y_{4}y_{4}' & y_{4}' \end{bmatrix} \begin{bmatrix} h_{1} \\ h_{2} \\ h_{3} \\ h_{4} \\ h_{5} \\ h_{6} \\ h_{7} \\ h_{8} \\ h_{9}\end{bmatrix} = \begin{bmatrix}0 \\ 0 \\ 0 \\ 0 \\ 0 \\ 0 \\ 0 \\ 0 \end{bmatrix}\]
- 위 식에서 \((x_{i}, y_{i})\)와 \((x_{i}', y_{i}')\)는 변환 전, 변환 후에 대응되는 좌표값으로 실제 값이 입력됩니다.
- 즉, 구해야 하는 미지수는 \(h_{i}\) 값이 됩니다.
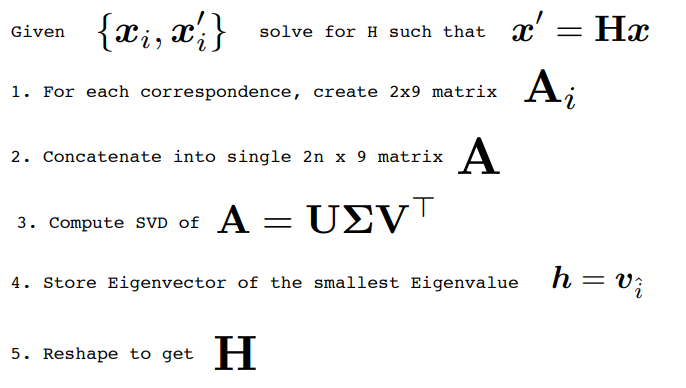
- 따라서 이 문제는
Homogeneous Linear Least Squares문제가 되며SVD(Singular Value Decomposition)을 이용하여 풀 수 있습니다.
- \[A = U \Sigma V^{T}\]
- 행렬 A를
SVD를 이용하여 분해하였을 때,Singular Value가 최소가 되는Right Singular Vector를 \(V\) 행렬에서 선택하면 \(Ah = 0\) 에 가장 근사하는 \(h\) 를 구할 수 있습니다. SVD를 하였을 때,Singular Value중 가장 작은 값이 0이면 \(Ah = 0\) 문제를 푸는 것이고 \(h\) 는 가장 작은Singular Value에 해당하는Right Singular Vector가 됩니다.- 반면
Singular Value중 가장 작은 값이 0이 아닌 양수이더라도 해는 가장 작은Singular Value에 해당하는Right Singular Vector가 되지만 \(Ah = 0 \to Ah = \delta \gt 0\) 의 문제로 바뀌게 되며 근사값을 찾게 됩니다. ( \(\delta\) 는 0에 가까운 작은 값입니다.) - 이와 같은 방법은 아래 링크에 자세하게 설명 되어 있으니 참조하시면 됩니다.
- 위 방법을 통하여 \(h\) 를 구하였으면 처음에 구하고자 한 형식에 맞게 \(H\) 행렬 (3 x 3) 으로 모양을 바꿔주면
homography를 최종적으로 구할 수 있습니다.
- 지금까지 살펴본
Direct Linear Transformation의 순서를 다시 정리하면 위 절차와 같습니다.
Python 실습
- 앞에서 살펴본
DLT내용을 파이썬 코드로 실습해 보면 다음과 같습니다. 아래 코드에서compute_homography함수가SVD를 이용하여Homography를 구하는 연산이고apply_homography함수는Transformation을 적용하는 함수입니다.
import numpy as np
from numpy.linalg import svd
np.set_printoptions(suppress=True)
def compute_homography(points1, points2):
# Ensure the points are in homogeneous coordinates
points1 = np.array(points1)
points2 = np.array(points2)
assert points1.shape == points2.shape
assert points1.shape[0] >= 4 # Need at least 4 points
# Construct matrix A
A = []
for i in range(len(points1)):
x, y = points1[i][0], points1[i][1]
x_prime, y_prime = points2[i][0], points2[i][1]
A.append([-x, -y, -1, 0, 0, 0, x_prime * x, x_prime * y, x_prime])
A.append([0, 0, 0, -x, -y, -1, y_prime * x, y_prime * y, y_prime])
A = np.array(A)
# Perform SVD
U, S, Vt = svd(A)
# The homography is the last row of V (or the last column of V transpose)
H = Vt[-1].reshape(3, 3)
# Normalize H
H = H / H[2, 2]
return H
def apply_homography(H, point):
"""Apply the homography matrix H to a point."""
point_homogeneous = np.array([point[0], point[1], 1]).T
transformed_point = H @ point_homogeneous
# Convert from homogeneous to 2D coordinates
transformed_point /= transformed_point[2]
return transformed_point[:2]
src_points = [
(100, 100), (150, 100), (200, 100), (250, 100), (300, 100), (350, 100), (400, 100),
(100, 150), (150, 150), (200, 150), (250, 150), (300, 150), (350, 150), (400, 150),
(100, 200), (150, 200), (200, 200), (250, 200), (300, 200), (350, 200), (400, 200)
]
dest_points = [
(120, 110), (170, 110), (220, 110), (270, 110), (320, 110), (370, 110), (420, 110),
(120, 160), (170, 160), (220, 160), (270, 160), (320, 160), (370, 160), (420, 160),
(120, 210), (170, 210), (220, 210), (270, 210), (320, 210), (370, 210), (420, 210)
]
# Compute homography
H = compute_homography(src_points, dest_points)
print(f"Computed Homography Matrix: \n{H}\n")
# Apply homography to each point in points1
transformed_points = [apply_homography(H, pt) for pt in src_points]
# Compare the transformed points with the original points2
for i, (transformed_point, dest_point) in enumerate(zip(transformed_points, dest_points)):
print(f"Point {i + 1}: Transformed Point = {transformed_point}, Destination Point = {dest_point}, Difference: {np.round(np.abs(transformed_point - dest_point), 4)}")
# Computed Homography Matrix:
# [[ 1. 0. 20.]
# [-0. 1. 10.]
# [ 0. -0. 1.]]
# Point 1: Transformed Point = [120. 110.], Destination Point = (120, 110), Difference: [0. 0.]
# Point 2: Transformed Point = [170. 110.], Destination Point = (170, 110), Difference: [0. 0.]
# Point 3: Transformed Point = [220. 110.], Destination Point = (220, 110), Difference: [0. 0.]
# Point 4: Transformed Point = [270. 110.], Destination Point = (270, 110), Difference: [0. 0.]
# Point 5: Transformed Point = [320. 110.], Destination Point = (320, 110), Difference: [0. 0.]
# Point 6: Transformed Point = [370. 110.], Destination Point = (370, 110), Difference: [0. 0.]
# Point 7: Transformed Point = [420. 110.], Destination Point = (420, 110), Difference: [0. 0.]
# Point 8: Transformed Point = [120. 160.], Destination Point = (120, 160), Difference: [0. 0.]
# Point 9: Transformed Point = [170. 160.], Destination Point = (170, 160), Difference: [0. 0.]
# Point 10: Transformed Point = [220. 160.], Destination Point = (220, 160), Difference: [0. 0.]
# Point 11: Transformed Point = [270. 160.], Destination Point = (270, 160), Difference: [0. 0.]
# Point 12: Transformed Point = [320. 160.], Destination Point = (320, 160), Difference: [0. 0.]
# Point 13: Transformed Point = [370. 160.], Destination Point = (370, 160), Difference: [0. 0.]
# Point 14: Transformed Point = [420. 160.], Destination Point = (420, 160), Difference: [0. 0.]
# Point 15: Transformed Point = [120. 210.], Destination Point = (120, 210), Difference: [0. 0.]
# Point 16: Transformed Point = [170. 210.], Destination Point = (170, 210), Difference: [0. 0.]
# Point 17: Transformed Point = [220. 210.], Destination Point = (220, 210), Difference: [0. 0.]
# Point 18: Transformed Point = [270. 210.], Destination Point = (270, 210), Difference: [0. 0.]
# Point 19: Transformed Point = [320. 210.], Destination Point = (320, 210), Difference: [0. 0.]
# Point 20: Transformed Point = [370. 210.], Destination Point = (370, 210), Difference: [0. 0.]
# Point 21: Transformed Point = [420. 210.], Destination Point = (420, 210), Difference: [0. 0.]
- 위 결과와 같이
Transformed Points와Dest Points가 같으므로 정상정으로Homography를 구한 것을 알 수 있습니다. 위 예제는 매우 간단하고 노이즈가 없는 예제이므로Transformed Points와Dest Points의 차이가 없습니다. - 아래 예제는 점들에 노이즈가 추가되어 조금 어렵게 형성된 예제입니다.
src_points = [
(154.2, 247.8), (191.3, 110.5), (213.7, 313.9), (341.1, 134.2), (432.5, 275.7),
(287.4, 189.2), (345.3, 248.8), (290.8, 379.4), (132.1, 354.6), (178.5, 298.2),
(341.5, 210.7), (254.3, 245.9), (310.9, 157.4), (420.7, 193.5), (387.2, 245.3),
(187.4, 184.5), (342.9, 300.3), (238.7, 172.5), (179.8, 349.4), (230.1, 300.2),
(415.6, 129.4)
]
dest_points = [
(162.7, 258.3), (198.1, 120.4), (220.8, 323.5), (352.1, 144.6), (441.2, 285.9),
(295.3, 200.8), (356.9, 259.7), (300.2, 388.1), (140.4, 364.7), (189.2, 308.3),
(352.7, 221.5), (264.1, 255.7), (320.3, 168.2), (431.6, 203.7), (398.5, 254.8),
(197.3, 195.2), (354.6, 311.7), (249.2, 183.8), (190.6, 360.1), (240.3, 310.5),
(426.8, 140.6)
]
# Compute homography
H = compute_homography(src_points, dest_points)
print(f"Computed Homography Matrix: \n{H}\n")
# Apply homography to each point in points1
transformed_points = [apply_homography(H, pt) for pt in src_points]
# Compare the transformed points with the original points2
for i, (transformed_point, dest_point) in enumerate(zip(transformed_points, dest_points)):
print(f"Point {i + 1}: Transformed Point = {transformed_point}, Destination Point = {dest_point}, Difference: {np.round(np.abs(transformed_point - dest_point), 4)}")
# Computed Homography Matrix:
# [[ 0.62948896 -0.13996937 77.26706373]
# [-0.11301842 0.64689205 66.98207917]
# [-0.00043868 -0.000458 1. ]]
# Point 1: Transformed Point = [170.54145084 256.27588536], Destination Point = (162.7, 258.3), Difference: [7.8415 2.0241]
# Point 2: Transformed Point = [210.54638186 135.00544025], Destination Point = (198.1, 120.4), Difference: [12.4464 14.6054]
# Point 3: Transformed Point = [220.13844963 322.48393338], Destination Point = (220.8, 323.5), Difference: [0.6616 1.0161]
# Point 4: Transformed Point = [346.30683226 146.08219468], Destination Point = (352.1, 144.6), Difference: [5.7932 1.4822]
# Point 5: Transformed Point = [454.57957033 287.20811344], Destination Point = (441.2, 285.9), Difference: [13.3796 1.3081]
# Point 6: Transformed Point = [294.30884688 199.28732076], Destination Point = (295.3, 200.8), Difference: [0.9912 1.5127]
# Point 7: Transformed Point = [353.68274796 257.16161861], Destination Point = (356.9, 259.7), Difference: [3.2173 2.5384]
# Point 8: Transformed Point = [296.59180241 400.11663673], Destination Point = (300.2, 388.1), Difference: [ 3.6082 12.0166]
# Point 9: Transformed Point = [142.10299935 360.98670428], Destination Point = (140.4, 364.7), Difference: [1.703 3.7133]
# Point 10: Transformed Point = [188.36905383 305.31898979], Destination Point = (189.2, 308.3), Difference: [0.8309 2.981 ]
# Point 11: Transformed Point = [348.61359007 218.50735649], Destination Point = (352.7, 221.5), Difference: [4.0864 2.9926]
# Point 12: Transformed Point = [261.5654585 254.32745519], Destination Point = (264.1, 255.7), Difference: [2.5345 1.3725]
# Point 13: Transformed Point = [317.03916619 168.87108922], Destination Point = (320.3, 168.2), Difference: [3.2608 0.6711]
# Point 14: Transformed Point = [433.40576589 198.96037183], Destination Point = (431.6, 203.7), Difference: [1.8058 4.7396]
# Point 15: Transformed Point = [399.37763163 253.42100193], Destination Point = (398.5, 254.8), Difference: [0.8776 1.379 ]
# Point 16: Transformed Point = [203.30153802 198.19534621], Destination Point = (197.3, 195.2), Difference: [6.0015 2.9953]
# Point 17: Transformed Point = [352.63059622 312.4693712 ], Destination Point = (354.6, 311.7), Difference: [1.9694 0.7694]
# Point 18: Transformed Point = [249.15616129 185.71242178], Destination Point = (249.2, 183.8), Difference: [0.0438 1.9124]
# Point 19: Transformed Point = [185.97323943 358.27897753], Destination Point = (190.6, 360.1), Difference: [4.6268 1.821 ]
# Point 20: Transformed Point = [236.47802522 308.80249163], Destination Point = (240.3, 310.5), Difference: [3.822 1.6975]
# Point 21: Transformed Point = [422.9471876 136.75769408], Destination Point = (426.8, 140.6), Difference: [3.8528 3.8423]
- 위 예제와 같이
Homography를 이상적으로 구할 수 없는 상황이라면Transformed Points와Dest Points간의 차이가 있지만, 차이를 최소화하는 방향으로Homography를 구하게 됩니다. - 가장 좋은 방법은 노이즈가 포함된 점들은 계산에 악영향을 끼치므로 제거하는 것이 좋습니다. 따라서
Homography를 구할 때,RANSAC과 같은 노이즈 제거 방법을 통하여 좀 더 강건한Homography를 구할 수 있습니다.RANSAC의 내용은 아래 링크를 참조하시면 됩니다.- RANSAC (RANdom SAmple Consensus) 개념 및 실습 : https://gaussian37.github.io/vision-concept-ransac/