영상의 edge detection (Sobel, Canny Edge) 원리와 사용법
2021, Feb 17
- 이번 글에서는 컴퓨터 비전에서 중요한 특징 추출의 방법을
edge detection에 대한 내용을 다루어 보도록 하겠습니다. - 이 글의 최종 목적은
auto canny edge detection을 사용하기 위함이며 이 방식에는 어떤 파라미터도 포함되지 않는 것에 장점이 있습니다.
목차
영상의 미분과 sobel filter
- 영상에서의
edge란 영상에서 픽셀의 밝기 값이 급격하게 변하는 부분을 의미합니다. 일반적으로 배경과 객체 또는 객체와 객체의 경계를 의미합니다.
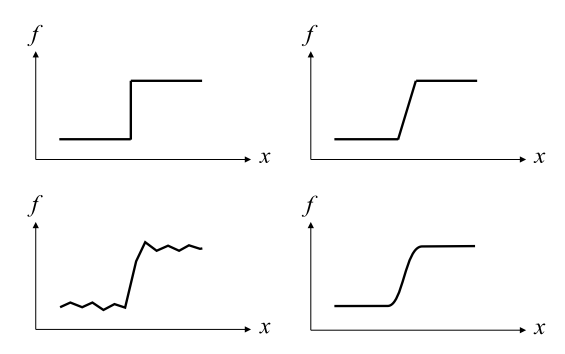
- 위 그림과 같이 f 축의 픽셀의 값이 갑자기 변화가 발생하는 지점에서
edge가 검출됩니다. - 왼쪽 상단의 형태는 급격한 형태로 표현한 것이며 실제 영상에서 값이 급격하게 바뀌더라도 우측 상단의 그래프와 같이 어느 정도는 부드럽게 값이 바뀌게 됩니다.
- 좀 더 현실적으로 보면 왼쪽 하단과 같이 어느 정도 노이즈가 섞여 있기 때문에 지글지글한 형태의 그래프를 확인할 수 있습니다. 이와 같은 경우 gaussian blur 등을 이용하면 최종적으로 우측 하단과 같이 부드럽게 값이 바뀌면서 노이즈도 적은 형태의 그래프를 얻을 수 있습니다.
- 만약 픽셀 값이 감소하게 되면 반대 형상의 그래프를 얻을 수 있습니다.
- 기본적인
edge 검출 방법은 영상을 (x, y) 변수의 함수로 간주하였을 때, 함수의 1차 미분 값이 크게 나타나는 부분을 검출합니다. - 미분을 이용하면 앞의 그래프의 예시와 같이 값이 급격하게 바뀌는 부분 즉,
변화율을 찾을 수 있기 때문입니다.
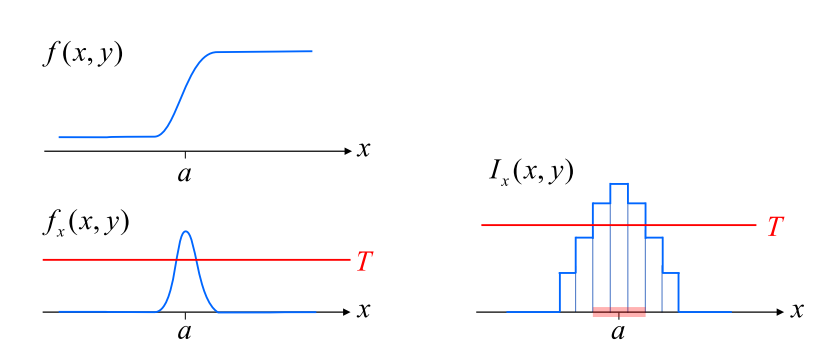
- 왼쪽 상단의 그래프가 \(f(x, y)\) 의 함수 중 \(x\) 축만을 고려하여 값의 변화를 살펴본 그래프라고 하면 왼쪽 하단의 그래프는 \(x\) 축에 대하여 미분을 하여 변화율을 살펴본 그래프입니다.
- 그래프의 양 끝 지점에서는 변화가 없기 때문에 변화율은 0이고 \(a\) 부근에서만 변화가 발생하기 때문에 \(a\) 부근에서만 변화율이 있는 것을 확인할 수 있습니다.
- 단, 디지털 영상에서 이러한 미분 값을 처리할 때에는 연속적인 값이 아닌 이산적인 값이기 때문에 최종적으로 오른쪽 하단과 같은 형태의 이산적인 값을 처리하게 됩니다.
- 위 그래프에서 가로선 방향의 \(T\) 값이 있는데 이 값을
threshold라고 적용하며 이 값을 기준으로edge를 검출할 수 있습니다. 위 오른쪽 하단 그래프의 예시에서 제공한 \(T\) 값을 초과한 값은 3개이며 edge라고 검출된 픽셀이 3개라고 볼 수 있습니다. 따라서 \(T\) 값을 크게 설정하거나 작게 설정하는 것에 따라 엣지 검출의 결과가 달라지게 됩니다.
- 1차 미분을 하는 방법은 흔히 알려져 있는 방식을 사용합니다. 아래는 1차 미분을 근사화 하는 방법이며 기본적으로 3가지 방식이 알려져 있습니다.
- \[\text{Forward Difference : } \frac{\partial I}{\partial x} = \frac{I(x + h) - I(x)}{h}\]
- \[\text{Backward Difference : } \frac{\partial I}{\partial x} = \frac{I(x) - I(x - h)}{h}\]
- \[\text{Centered Difference : } \frac{\partial I}{\partial x} = \frac{I(x + h) - I(x - h)}{2h}\]
- 위 3가지 방식 중 마지막의 중앙 차분이 가장 근사화가 잘되는 것으로 알려져 있으므로 edge detection을 위한 방법 또한 중앙 차분을 사용합니다.
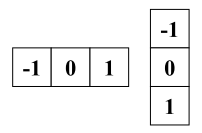
- 따라서 edge detection을 위하여 위 그림과 같은
미분 마스크를 사용하게 됩니다. - 미분 마스크의 -1 부분의 픽셀 값의 위치가 가장 작고 0, 1 방향으로 픽셀 값의 위치가 커집니다. 따라서 미분 마스크를 이용하여 각 픽셀의 영역과 곱한 뒤 모두 더하는 연산을 하면 미분을 근사화 할 수 있습니다.
- \[(x_{-1} * -1 + x_{0} * 0 + x_{1} * 1)\]
- 중앙 차분의 분모 \(2h\) 는 모든 픽셀에 동일하게 곱해지므로 변화율을 계산하기 때문에 생략해도 무관합니다.
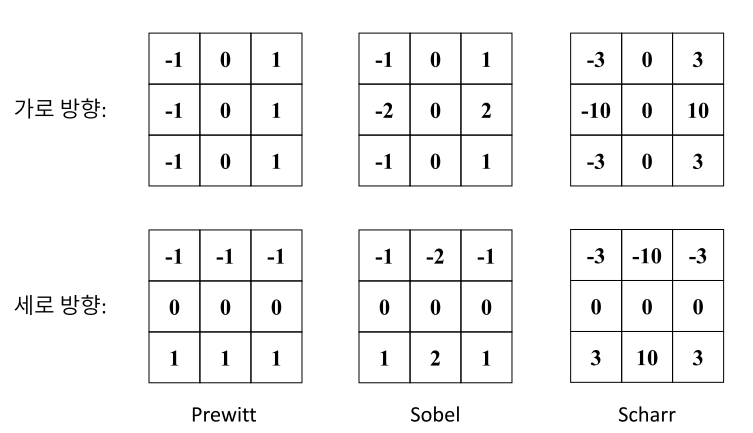
- 흔히 사용하는 마스크의 형태는 위 그림과 같이 \(x, y\) 방향 계산에 적용하는 정사각형 형태의 마스크를 사용합니다.
- 위 그림과 같이 정사각형 형태의 마스크를 통해 \(x, y\) 방향 모두에 평균값을 적용하여 마스크를 사용하면 노이즈에 좀 더 강건해지는 효과가 있으며 가로 방향과 세로 방향 각각 마스크를 적용함으로써 가로 방향과 세로 방향의 edge를 모두 검출할 수 있습니다.
- 뿐만 아니라 단순히 -1, 0, 1 형태가 아닌 다른 값을 사용하기도 하며 변화율을 어떤 크기로 반영하여 나타낼 지에 따라서 마스크의 값이 달라질 뿐 성격은 모두 동일합니다.
prewitt필터는 단순히 평균값을 사용하는 필터이지만sobel이나scharr는 기준 픽셀에 좀 더 큰 가중치를 주는 방식이며 이와 같은 방식을 사용할 때 효과가 더 좋다고 알려져 있습니다. (sobel은 1:2:1 의 가중치로 기준 픽셀에 더 큰 가중치가 있습니다.) scharr필터는 3:10:3 의 가중치 비율을 가지며 이와 같은 방식이 좀 더 가우시안 분포에 가깝게 필터링 할 수 있다고 제안합니다. 하지만 성능 차이가 크지 않기 때문에 간단한sobel을 많이 사용하는 것이 추세입니다.
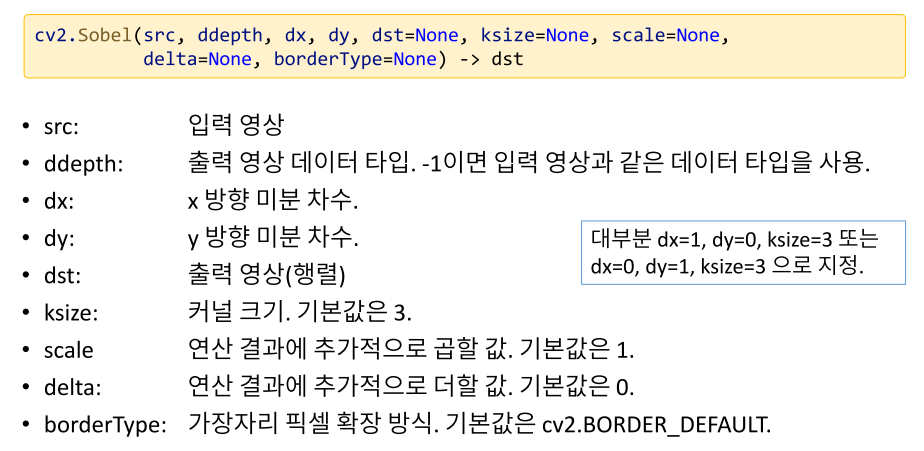
- 위 함수는
sobel필터를 사용하는 방법입니다. dx,dy을 하나는 1, 다른 하나는 0 그리고ksize는 3을 주면 앞에서 살펴본 형태의 3x3 필터를 사용할 수 있습니다.dx=1, dy=0를 사용하면 x방향의 편미분이고dx=0, dy=1을 사용하면 y방향의 편미분을 의미합니다.scale과delta는 최종 결과에 곱하거나 더하는 값을 의미합니다. 이와 같이 값을 변경하는 이유는 시각화하여 볼 때, 보기 어려운 문제가 있기 때문에 사람이 볼 수 있는 영역으로 바꾸기 위함입니다.
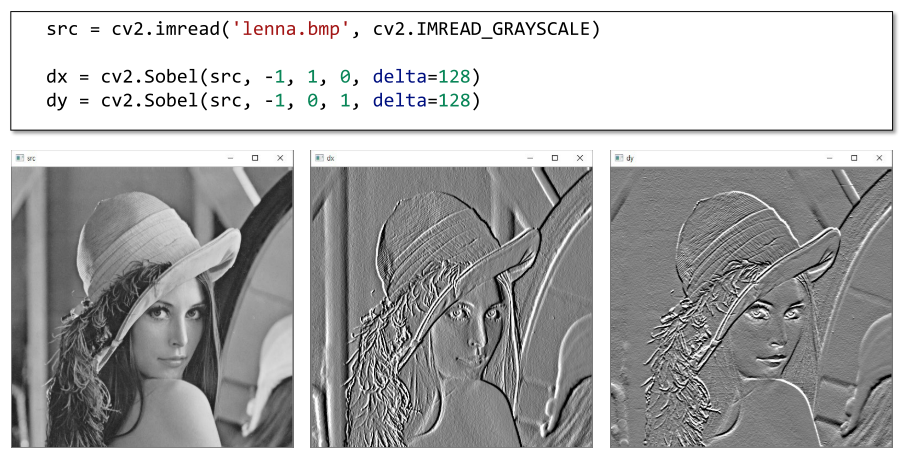
- 가운데 영상은 x 방향의 미분을 적용한 것이고 오른쪽 영상은 y방향의 미분을 적용한 것입니다. 시각화 하기 위하여 그레이스케일 값에서 변화량이 없는 값은 128로 두고 음의 변화량을 가질수록 작은 값 (어두움)을 가지고 양의 변화량을 가질수록 큰 값 (밝음)을 가지도록 시각화 하였습니다.
- 두 결과에서 배경 부분의 기둥을 살펴보면 x 방향에서는 edge가 있는 반면 y 방향에서는 edge가 없는 것을 확인할 수 있습니다. 즉, 기둥은 x 방향에서 변화량이 크기 때문에 x 방향의 그림에서만 edge가 나타난 것입니다.
- 따라서 실제 edge를 검출할 때에는 x, y 방향 모두 적용한 결과를 이용해야 합니다. 각 x, y 방향의 미분 성분을 이용하여 어떻게
edge detection을 하는 지 살펴보도록 하겠습니다.
gradient와 edge detection
canny edge detection
- 이번 글에서 다루고자 하는 알고리즘은
canny edge알고리즘이며 많은 사람들이 기본적으로 사용하는edge detection알고리즘입니다. - 앞에서 다룬
sobel edge detection은 두꺼운 형태로 edge를 검출하는 단점을 보입니다. 즉, edge를 정확하게 검출하는 데 한계가 있습니다. - 좋은
edge detection의 조건은 ①정확한 검출②정확한 위치, ③단일 edge조건을 만족해야 합니다. 즉, edge가 아닌 점을 edge로 찾거나 또는 edge인데 edge로 찾지 못하는 확률을 최소화 해야 하며 실제 edge의 중심을 검출하고 하나의 edge는 하나의 점으로 표현해야 합니다. - ①
정확한 검출관련 예시로 조명값이 변화하면 같은 영역이라도 edge 였던 부분이 edge가 아닌 부분이 되기도 합니다. 이런 경우 threshold 값에 민감해집니다. 따라서 이러한 환경에 강건할 수 있도록 알고리즘이 개선되어야 합니다. - ②
정확한 위치와 ③단일 edge관련 예시로sobel filter를 이용한 edge detection은 edge의 두께가 두껍기 때문에 정확한 edge 위치를 알 기 어렵습니다. 따라서 하나의 edge는 하나의 점으로 표현하는 점이 중요함을 뜻합니다.
canny edge detection은 총 4가지 단계를 거치게 됩니다.- ①
가우시안 필터링과정을 거칩니다. 목적은 노이즈 제거입니다. 따라서 아래 식의 필터를 이미지 전체에 적용합니다.
- \[G_{\sigma}(x, y) = \frac{1}{2\pi \sigma^{2}} \exp{(-\frac{x^{2} + y^{2}}{2\sigma})}\]
- ②
gradient계산 (크기 & 방향) sobel filter를 이용하면 \(x, y\) 방향으로 미분값을 구하고 이 값을 통해gradient의 크기와 방향을 구할 수 있음을 앞에서 확인하였습니다. 크기와 방향 성분은 앞에서 다룬 식과 같습니다.
- \[\text{magnitude : } \Vert f \Vert = \sqrt{f_{x}^{2} + f_{y}^{2}}\]
- \[\text{phase : } \theta = \tan^{-1}{(\frac{f_{y}}{f_{x}})}\]
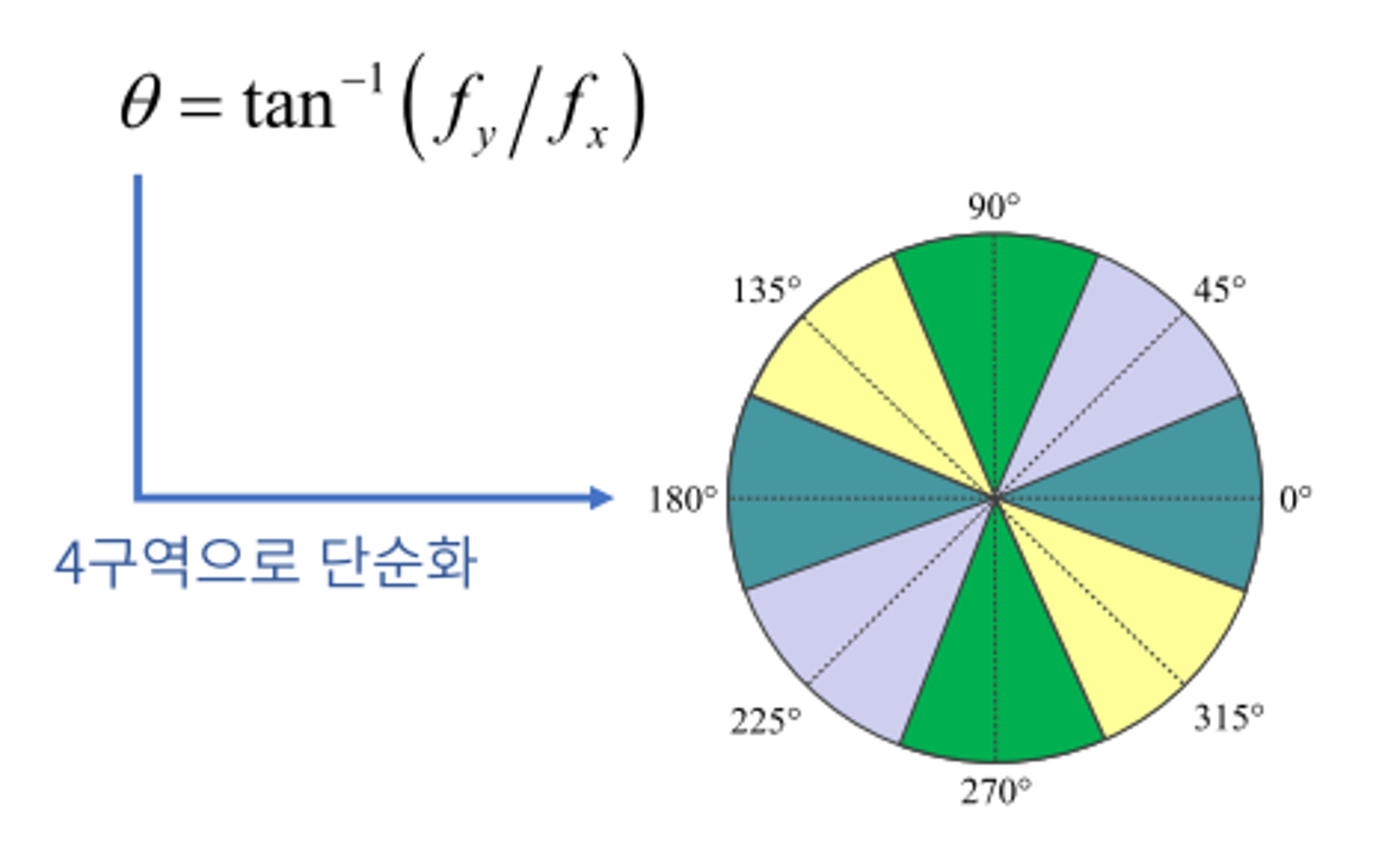
- 이미지의 각 픽셀이 사각형으로 구분되어 졌기 때문에 픽셀의 0도, 45도, 90도, 135도와 대칭되는 영역 까지 그룹으로 묶으면 위 그림과 같이 4가지 색으로 표현하여 구역 구분을 단순화 할 수 있습니다.
- 이 과정을 통해
gradient의 크기와 방향 (magnitude와 phase)를 구합니다.
- ③
NMS (Non-maximum suppression) - 하나의 edge가 여러 개의 픽셀로 표현되는 현상을 없애기 위하여
gradient크기가local maximum인 픽셀만을 edge 픽셀로 설정합니다. - 따라서
gradient방향에 위치한 두 개의 픽셀을 조사하여local maximum인 지 확인합니다.
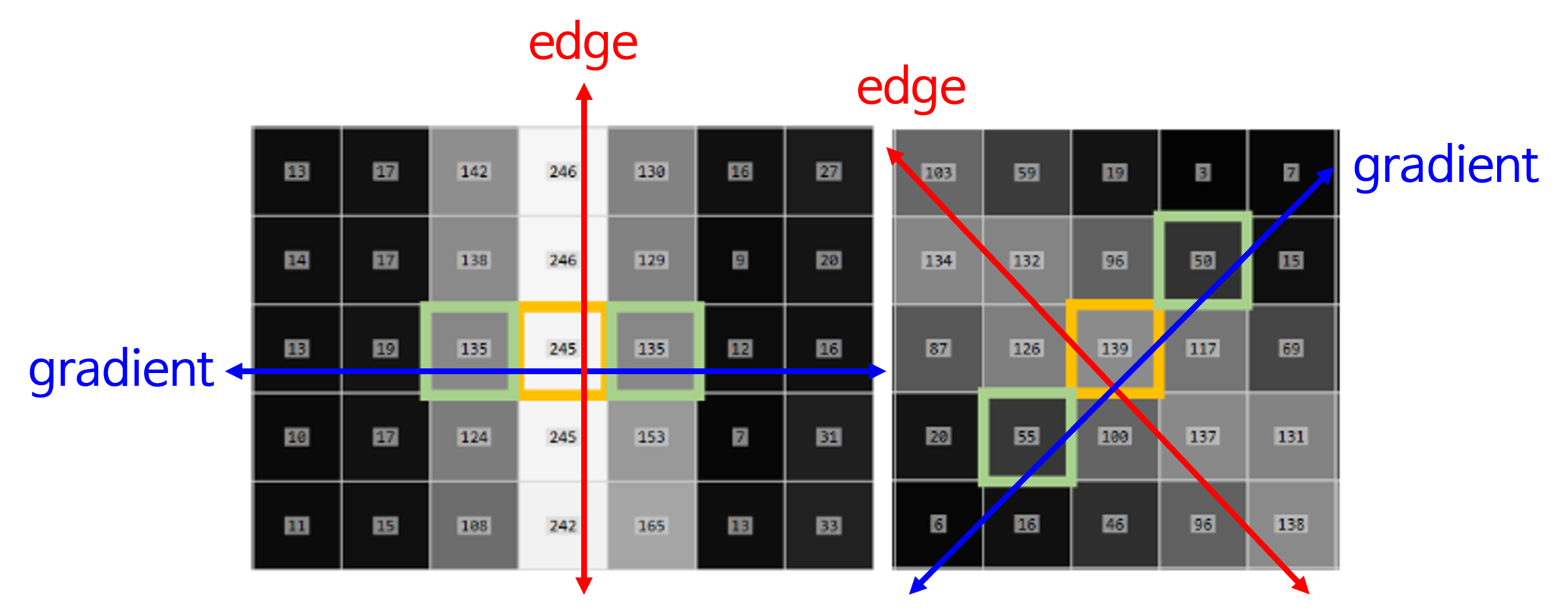
- 위 그림과 같이
edge와gradient는 직교입니다. 따라서gradient의 방향을 기준으로NMS를 적용하기 때문에 단일edge를 선택할 수 있습니다. 즉,sobel만을 이용하였을 때 나타나는 두꺼운 edge 문제를 개선할 수 있습니다.
- ④
Hysteresis edge tracking - 마지막으로 사용되는 방법에서
cany edge방식의 파라미터가 추가 됩니다.threshold low,threshold high인 두가지 임계값입니다.
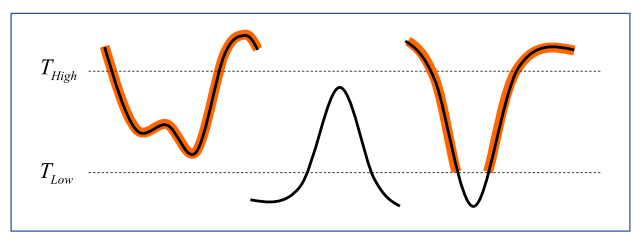
- 위 그림과 같이 두 개의 임계값을 사용하며 edge로 판별할 수 있는 기준이 두가지 영역으로 구분됩니다.
- 먼저 \(T_{High}\) 이상의
gradient를 가지는 픽셀은 edge로 판별 됩니다. \(T_{High}\) 이상의gradient를 가지는 edge를strong edge라고 합니다. - 반면 \(T_{Low}\) 이하의
gradient를 가지는 픽셀은 edge가 아닌 것으로 판별합니다. - 마지막으로 \(T_{Low}\) 와 \(T_{High}\) 사이 (hysterisis 구간)의
gradient를 가지는 픽셀들을 계속 이어 갔을 때, \(T_{High}\) 이상의gradient의 값을 가지는 픽셀과 연결이 된다면hysterisis 구간의 픽셀을 모두 edge로 판별합니다. 이 값들을weak edge라고 합니다. - 이와 같은 방식을 사용하는 이유는 앞에서 말한 예시와 같이 조명 등의 환경에 따라서 엣지의 검출 조건이 바뀔 수 있으며 엣지의 특성 상 갑자기 나타나지 않고 엣지는 연결되어 있다는 것을 이용하여 기존 문제를 개선하기 위한 아이디어 입니다.
- 따라서 위 그림의 가장 왼쪽 예시는 hysterisis 구간의 픽셀들이 연속적으로
strong edge들과 연결되어 있으므로weak edge로 판별합니다. 반면 가운데 예시에서는 hysterisis 구간의 픽셀들이strong edge들과 연결되지 못하므로 edge로 판별하지 않습니다. 가장 오른쪽 예시에서는 hysterisis 구간의 픽셀들이 양쪽 끝에 연결되어weak edge로 판별이 났으나 hysterisis 구간을 벗어나 gradient가 작아진 부분은 edge가 아님을 확인할 수 있습니다.
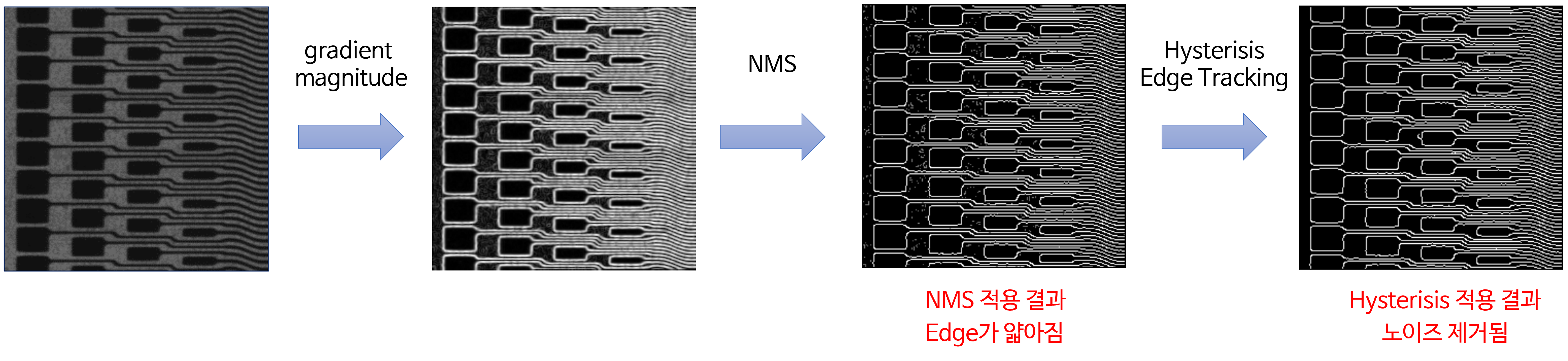
- 이 영상 예시를 보면 입력 값에 ① sobel을 적용하고 ② NMS를 적용 후 ③ Hysterisis Edge Tracking을 적용한 결과입니다.
NMS를 적용하면서 edge의 굵기가 얇아졌고Hysterisis Edge Tracking을 적용하면서 노이즈 들이 사라진 것을 볼 수 있습니다.
- 실제
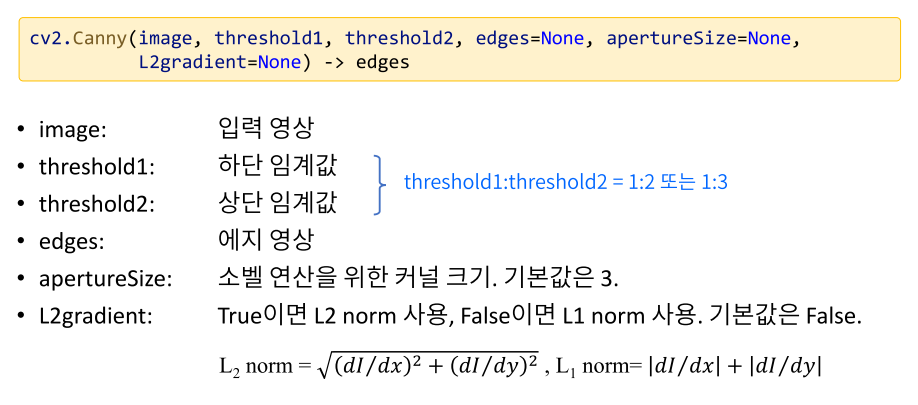
canny edge detection을 적용하기 위한 함수 사용법은 위 그림과 같습니다.threshold1, threshold2각각은 비율을 1:2 또는 1:3을 가지도록 설정하면 적당한 수준입니다. 이미지에 따라서 원하는 edge를 얻으려면 어느 수준으로 정해야 하는 지 직접 살펴보는 것이 좋습니다.
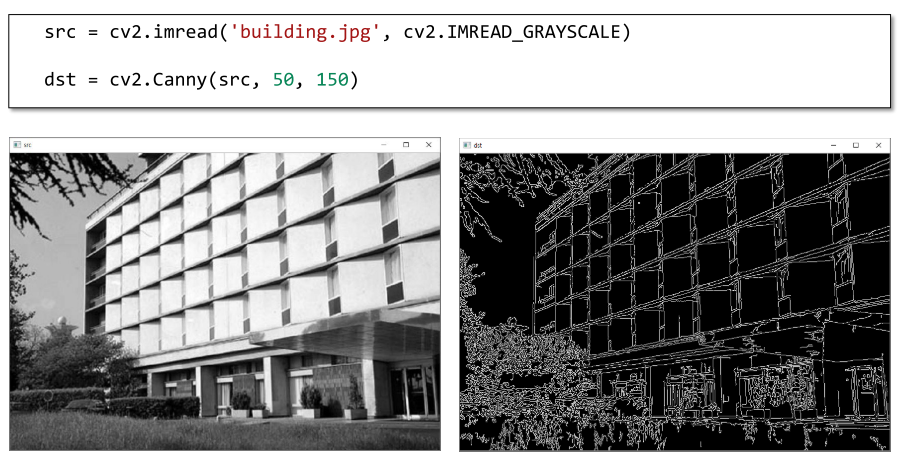
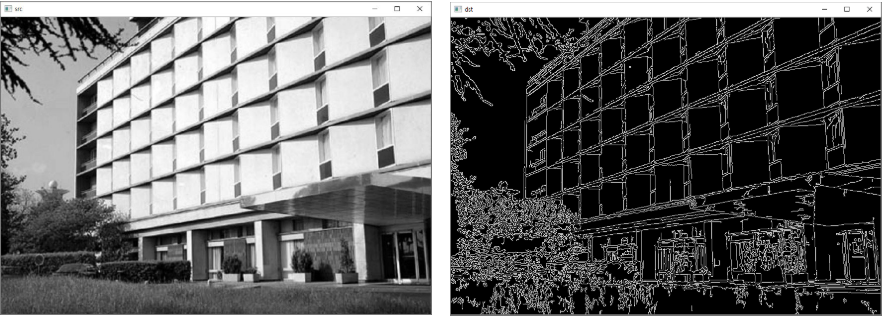
- 위 예시와 같이 간단하게
canny edge detection을 적용할 수 있습니다. - 노이즈를 더 깔끔하게 제거하고 싶으면 입력 영상에 가우시안 필터를 적용하면 효과가 좋습니다.
auto canny edge edtection
canny edge detection의 성능은 좋지만threshold1, threshold2를 정해야 한다는 단점이 있습니다. 다양한 환경의 사진을 매번 보면서 매뉴얼한 방식으로 두 값을 정해야 하는 것은 비효율적입니다.- 따라서 이미지 픽셀 값을 이용하여 효과적으로 두 값을 정하는 방식을 통해 이미지를 매번 확인하지 않고
edge detection을 하고자 합니다. - 방법은 간단히 중앙값을 기준으로 1 sigma 구간의 hysterisis를 적용하는 것입니다. 따라서 중앙값 기준 -1 sigma가 하한값이 되고 +1 sigma가 상한값이 됩니다.
- 1 sigma의 크기는 중앙값 대비 0.33의 편차 (즉, 0.67, 1.33)이기 때문에 하한값과 상한값은 약 2배 차이가 나며 자동적으로 하한값의 크기도 결정됩니다.
- 아래는 위 설명을 코드로 구현한 것이며 입력 이미지에 가우시안 블러 또한 적용하였습니다.
def auto_canny(image, sigma=0.33):
image = cv2.GaussianBlur(image, (3, 3), 0)
# compute the median of the single channel pixel intensities
v = np.median(image)
# apply automatic Canny edge detection using the computed median
lower = int(max(0, (1.0 - sigma) * v))
upper = int(min(255, (1.0 + sigma) * v))
edged = cv2.Canny(image, lower, upper)
# return the edged image
return edged
image = cv2.imread("test.png", cv2.IMREAD_GRAYSCALE)
edge = auto_canny(image)