
SSIM (Structural Similarity Index)
2022, Feb 17
- 참조 : https://en.wikipedia.org/wiki/Structural_similarity
- 참조 : https://medium.com/srm-mic/all-about-structural-similarity-index-ssim-theory-code-in-pytorch-6551b455541e
- 참조 : https://bskyvision.com/878
- 참조 : https://walkaroundthedevelop.tistory.com/m/56
- 참조 : https://nate9389.tistory.com/2067
- 참조 : https://medium.com/@sanari85/image-reconstruction-%EC%97%90%EC%84%9C-ssim-index%EC%9D%98-%EC%9E%AC%EC%A1%B0%EB%AA%85-b3ca26434fb1
- 이번 글에서는 두 이미지를 비교하는 지표인
SSIM에 대하여 다루어 보도록 하겠습니다. SSIM은Structural Similarity Index의 약어로 사용되며 주어진 2개의 이미지의similarity(유사도)를 계산하는 측도로 사용됩니다.SSIM은 두 이미지의 단순 유사도를 측정하는데 사용하기도 하지만 풀고자 하는 문제가 두 이미지가 유사해지도록 만들어야 되는 문제일 때SSIM을 Loss Function 형태로 사용하기도 합니다. 왜냐하면SSIM이 gradient-based로 구현되어 있기 때문입니다.- 딥러닝에서 두 이미지를 유사하게 만드는 문제나 depth estimation시 disparity를 구하기 위하여 이미지를 복원할 때, 두 이미지 또는 두 패치의 유사도를 측정하여 Loss Function을 사용하는 방법이 많이 사용됩니다.
- 따라서 이번 챕터에서는
SSIM의 원리에 대하여 먼저 알아보고 Pytorch의 구현 방법을 통하여 학습에 사용하는 방법과 skimage를 이용하여 단순히 이미지의 유사도를 측정하는 방법에 대하여 살펴보도록 하겠습니다.
목차
SSIM의 정의
SSIM은 Structural Similarity Index Measure의 약어로 두 이미지의 유사도를luminance,contrast,structure3가지 요소를 이용하여 비교하는 방법을 의미합니다. 이와 같은 요소를 이용하여 이미지를 비교하는 이유는 실제 인간의 시각 기관도 이와 같은 방법으로 인식하기 때문입니다.SSIM의 최종 결과는 0 ~ 1 사이이며 1에 가까울수록 두 이미지가 유사함을 의미합니다. 그러면luminance,contrast,structure가 각각 어떻게 계산되어서 하나로 합쳐지는 지 살펴보도록 하곘습니다. 입력값의 범위에 따라서 -1 ~ 1 사이의 값을 가질수도 있으며 1에 가까울수록 두 이미지가 유사한 것은 동일합니다.
Luminance
luminance는 한글로 휘도라고 하며 빛의 밝기를 나타내는 양입니다. SSIM에서 계산할 때, 별도 빛의 밝기 성분을 추출해서 사용하지는 않고 이미지의 픽셀값을 이용합니다. (픽셀 값이 클수록 밝음을 이용함) grayscale 이미지에서는 각 픽셀의 값을 의미하며 RGB 이미지에서는 R, G, B 각 채널 별 픽셀 값을 의미합니다.
- \[\mu_{x} = \frac{1}{N}\sum_{i=1}^{N} x_{i}\]
-
\(x_{i}\) : 각 픽셀의 값 (밝기 값을 의미함)
-
\(N\) : 전체 픽셀의 갯수
- \(\mu_{x}\) : 이미지의 평균
luminance
- 두 이미지의
luminance가 얼마나 다른 지 비교하기 위해 \(\mu_{x}\) 값을 이용합니다. 두 이미지를 \(x, y\) 라고 할 때 두 이미지의luminance를 비교하기 위한 식은 다음과 같습니다.
- \[l(x, y) = \frac{2\mu_{x}\mu_{y} + C_{1}}{\mu_{x}^{2}+ \mu_{y}^{2} + C_{1}} \tag{1}\]
- 식 (1)의 \(C_{1}\) 을 제외하고 살펴보면 \(\frac{2\mu_{x}\mu_{y}}{\mu_{x}^{2} + \mu_{y}^{2}}\) 가 되며 \(\mu_{x}, \mu_{y}\) 각 같으면 1이 되고 두 값이 차이가 많이 날수록 0에 가까워 집니다. 이와 같은 성질을 이용하여 두 값의 차이에 따른 값의 범위를 0 ~ 1로 계산될 수 있도록 합니다.
- 식 (1)에서 \(C_{1}\) 의 사용 용도는 분모에 0이 되는 것을 방지하기 위하여 안정성을 위해 추가하였고 값의 정의 방법은 아래 식을 따르는 것으로 알려져 있습니다. (하지만 크게 중요하지 않으니 적당한 상수값을 사용하여도 무관합니다.)
- \[C_{1} = (K_{1}L)^{2}\]
- 위 식에서 \(K_{1}\) 는 일반 상수이며 보통 0.01을 많이 사용합니다. \(L\) 은 픽셀값의 범위를 입력하며 일반적으로 8비트 값을 사용하여 0 ~ 255의 픽셀 값을 사용하므로 255를 \(L\) 로 사용합니다.
- 따라서 \(C_{1} = (0.01 \times 255)^{2} = 6.5025\) 를 사용합니다.
Contrast
contrast는 한글로 대조라고 하며 이미지 내에서 빛의 밝기가 바뀌는 정도를 나타내는 양입니다. 이 값은 픽셀 간의 값이 얼마나 차이가 나는 지 통하여 정량화 할 수 있으므로 표준 편차를 사용합니다.
- \[\sigma_{x} = \left( \frac{1}{N-1} \sum_{i=1}^{N} (x_{i} - \mu_{x})^{2} \right)^{1/2}\]
-
\(N - 1\) : 표본의 표준 편차를 구하기 때문에 표본의 표준편차가 모표준 편차가 될 수 있도록 하기 위해 \(N - 1\)을 사용합니다.
- \(\sigma_{x}\) : 이미지의 픽셀 간 표준편차로
contrast를 의미합니다.
- 두 이미지의
contrast성분을 비교하기 위해서는 \(\sigma_{x}\) 를 사용합니다. 상세식은luminance의 \(l(x, y)\) 와 동일합니다.
- \[c(x, y) = \frac{2\sigma_{x}\sigma_{y} + C_{2}}{\sigma_{x}^{2} + \sigma_{y}^{2} + C_{2}} \tag{2}\]
- 위 식에서도
luminance의 경우와 동일하게 두 이미지의contrast성분이 같을 수록 1에 가깝고 다를수록 0에 가까워집니다. - 식 (2)의 \(C_{2}\) 의 경우 \(C_{2} = (K_{2}L)^{2}\) 로 구하며 \(K_{2} = 0.03\) 을 주로 사용하여 다음과 같은 값을 가집니다.
- \[C_{2} = (K_{2}L)^{2} = (0.03 \times 255)^{2} = 58.5225\]
Structure
- 마지막으로
structure는 픽셀값의 구조적인 차이점을 나타내며 정성적으로 성분을 확인 시, edge를 나타냅니다.sturucture를 구하기 위하여luminance을 평균,contrast를 표준 편차로 이용하여 Normalized된 픽셀 값의 분포에서 픽셀 값을 다시 정의합니다.
- \[(X - \mu_{x}) / \sigma_{x}\]
- \(X\) : 입력 이미지
- 두 이미지의
structure성분의 유사성을 확인하는 것은 두 이미지의correlation을 이용하것과 같은 의미를 지닙니다.
- \[\text{corr}(X, Y) = \frac{\sigma_{xy}}{\sigma_{x}\sigma_{y}} = \frac{E[(x - \mu_{x})(y - \mu_{y})]}{\sigma_{x}\sigma_{y}} = E \left[\frac{(x - \mu_{x})(y - \mu_{y})}{\sigma_{x}\sigma_{y}}\right]\]
- \[= E \left[\frac{(x - \mu_{x})}{\sigma_{x}} \frac{(y - \mu_{y})}{\sigma_{y}}\right]\]
- 따라서 두 이미지의 correlation을 구하는 것은 각 이미지의
structure성분의 곱의 평균을 구하는 것과 같고structure성분이 같은 방향으로 커지면 1에 가까워지는 성질을 이용하여 앞선luminance,contrast와 동일하게 이용할 수 있습니다. - 따라서 두 이미지의
structure를 비교하는 함수를 다음과 같이 정의할 수 있습니다.
- \[s(x, y) = \frac{\sigma_{xy} + C_{3}}{\sigma_{x}\sigma_{y} + C_{3}} \tag{3}\]
- \[\sigma_{xy} = \frac{1}{N-1} \sum_{i=1}^{N}(x_{i} - \mu_{x})(y_{i} - \mu_{y})\]
- 이 때, \(C_{3}\) 는 식의 편의상 \(C_{2} / 2\) 로 사용합니다. 그 이유는
SSIM은 \(l(x, y), c(x, y), s(x, y)\) 의 곱으로 정의되는 데 \(C_{3} = C_{2} / 2\) 로 정의하면 식을 간편화 할 수 있습니다. 이는 이후 식을 전개하면서 보여드리겠습니다.
- 이와 같이
luminance,contrast,strucrue를 모두 반영한 이미지의 유사도를 결정하는SSIM은 다음과 같이 정의됩니다.
- \[\text{SSIM}(x, y) = l(x, y)^{\alpha} \cdot c(x, y)^{\beta} \cdot s(x, y)^{\gamma} \tag{4}\]
- 식 (4)에서 \(\alpha, \beta, \gamma > 0\) 이면
luminance,contrast,structure에 상대적인 중요도를 설정할 수 있습니다. - 앞에서 설명한 대로 식을 간소화 하기 위하여 \(\alpha = \beta = \gamma = 1\) 로 두고 \(C_{3} = C_{2} / 2\) 로 하여 식을 전개해 보겠습니다.
- \[\text{SSIM}(x, y) = l(x, y) \cdot c(x, y) \cdot s(x, y) = \frac{2\mu_{x}\mu_{y} + C_{1}}{\mu_{x}^{2} + \mu_{y}^{2} + C_{1}} \frac{2\sigma_{x}\sigma_{y} + C_{2}}{\sigma_{x}^{2} + \sigma_{y}^{2} + C_{2}} \frac{\sigma_{xy} + C_{2}/2}{\sigma_{x}\sigma_{y} + C_{2}/2} \tag{5}\]
- \[= \frac{(2\mu_{x}\mu_{y} + C_{1}) (2\sigma_{xy} + C_{2})}{(\mu_{x}^{2} + \mu_{y}^{2} + C_{1})(\sigma_{x}^{2} + \sigma_{y}^{2} + C_{2})} \tag{6}\]
SSIM은 symmetry 성질은 만족하여 x, y 이미지의 순서를 바꿔도 됩니다. 하지만 triangle inequality ( \(\vert a + b \vert \le \vert a \vert + \vert b \vert\) ) 를 만족하지 않아서 distance를 구하기 위한 함수로는 사용할 수 없습니다.SSIM을 좀 더 효과적으로 사용하기 위해서는 이미지 전체를 한번에 비교하기 보다는 N x N 윈도우를 이용하여 (ex. 8 X 8, 11 X 11) 지역적으로 비교하여 사용하는 것이 효과적입니다. 왜냐하면 이미지의 왜곡이나 통계적 특성이 이미지 전반에 걸쳐서 나타나는 경우보다 지역적으로 나타나는 경우가 많고 지역적으로 더 다양한 특성을 분석할 수 있기 때문입니다.- 이와 같은 방법으로 지역적으로
SSIM을 구하려면 윈도우를 이용하여 슬라이딩 윈도우를 적용하여 각 부분의 값을 구해야 합니다. 이와 관련된 구현 내용으로 아래SSIM의 Pytorch에서의 사용법 (locally)을 참조해 주시기 바랍니다.
- 만약
SSIM을 Loss로 사용하려면 아래와 같이 식을 변경해서 사용하면 됩니다.
- \[L_{\text{SSIM}} = 1 - \text{SSIM}(x, y) \tag{7}\]
SSIM은 미분 가능하므로 Loss로 사용 가능하며 0 ~ 1 사이의 스코어 값을 1에서 빼주면 두 이미지의 유사도가 낮을수록 값이 커지기 때문에 Loss로 사용할 수 있습니다.
- 만약 RGB 이미지에서 SSIM을 적용해야 한다면 각 채널 별로 SSIM을 구한 후 모두 합해주면 됩니다. 식으로 나타내면 아래와 같습니다.
- \[\text{SSIM}_{\text{rgb}} = w_{r}\text{SSIM}_{r}(I_{1}, I_{2}) + w_{g}\text{SSIM}_{g}(I_{1}, I_{2}) + w_{b}\text{SSIM}_{b}(I_{1}, I_{2}) \tag{8}\]
- 특정 채널에 대하여 더 가중치를 줄 수도 있으며 일반적으로
RGB에 1/3 씩 균등하게 가중치를 주어서 사용합니다. YCrCb에서는Y에 0.8,Cr,Cb에 각각 0.1을 주어서 사용하기도 합니다. (링크 참조)
SSIM의 Pytorch에서의 사용법 (globally)
- 먼저 이미지 전체에서 한번에
SSIM을 구하는 방법을 Pytorch을 이용해서 구해보도록 하곘습니다. 이와 같은 방법으로SSIM을 구하면 간단하게 전체 이미지에 대하여SSIM의 Score 또는SSIM을 이용한Loss를 구할 수 있습니다.
class SSIM(nn.Module):
"""Layer to compute the SSIM loss between a pair of images
"""
def __init__(self):
super(SSIM, self).__init__()
self.mu_x_pool = nn.AvgPool2d(3, 1)
self.mu_y_pool = nn.AvgPool2d(3, 1)
self.sig_x_pool = nn.AvgPool2d(3, 1)
self.sig_y_pool = nn.AvgPool2d(3, 1)
self.sig_xy_pool = nn.AvgPool2d(3, 1)
# 입력 경계의 반사를 사용하여 상/하/좌/우에 입력 텐서를 추가로 채웁니다.
self.refl = nn.ReflectionPad2d(1)
self.C1 = 0.01 ** 2
self.C2 = 0.03 ** 2
def forward(self, x, y):
# shape : (xh, xw) -> (xh + 2, xw + 2)
x = self.refl(x)
# shape : (yh, yw) -> (yh + 2, yw + 2)
y = self.refl(y)
mu_x = self.mu_x_pool(x)
mu_y = self.mu_y_pool(y)
sigma_x = self.sig_x_pool(x ** 2) - mu_x ** 2
sigma_y = self.sig_y_pool(y ** 2) - mu_y ** 2
sigma_xy = self.sig_xy_pool(x * y) - mu_x * mu_y
SSIM_n = (2 * mu_x * mu_y + self.C1) * (2 * sigma_xy + self.C2)
SSIM_d = (mu_x ** 2 + mu_y ** 2 + self.C1) * (sigma_x + sigma_y + self.C2)
# SSIM score
return torch.clamp((SSIM_n / SSIM_d) / 2, 0, 1)
# Loss function
# return torch.clamp((1 - SSIM_n / SSIM_d) / 2, 0, 1)
SSIM의 Pytorch에서의 사용법 (locally)
- 이번에는
convolution연산을 이용하여 로컬한 영역에서SSIM을 구하는 방법에 대하여 Pytorch 코드를 통해 알아보도록 하겠습니다. - 앞에서 설명 드렸듯이, 이미지의 특성상 이미지 전체를 한번에 계산하는 것 보다 local한 영역을 기준으로 계산하는 것이 이미지의 각 부분 별 특성을 비교할 수 있습니다.
import torch
import torch.nn.functional as F
import numpy as np
import math
import cv2
def gaussian(window_size, sigma):
"""
Generates a list of Tensor values drawn from a gaussian distribution with standard
diviation = sigma and sum of all elements = 1.
Length of list = window_size
"""
gauss = torch.Tensor([math.exp(-(x - window_size//2)**2/float(2*sigma**2)) for x in range(window_size)])
return gauss/gauss.sum()
def create_window(window_size, channel=1):
# Generate an 1D tensor containing values sampled from a gaussian distribution
# _1d_window : (window_size, 1)
# sum of _1d_window = 1
_1d_window = gaussian(window_size=window_size, sigma=1.5).unsqueeze(1)
# Converting to 2D : _1d_window (window_size, 1) @ _1d_window.T (1, window_size)
# _2d_window : (window_size, window_size)
# sum of _2d_window = 1
_2d_window = _1d_window.mm(_1d_window.t()).float().unsqueeze(0).unsqueeze(0)
# expand _2d_window to window size
# window : (channel, 1, window_size, window_size)
window = torch.Tensor(_2d_window.expand(channel, 1, window_size, window_size).contiguous())
return window
def ssim(img1, img2, window_size=11, val_range=255, window=None, size_average=True, full=False):
# L is the dynamic range of the pixel values (255 for 8-bit grayscale images),
L = val_range
try:
_, channels, height, width = img1.size()
except:
channels, height, width = img1.size()
# if window is not provided, init one
if window is None:
# window should be at least 11x11
real_size = min(window_size, height, width)
window = create_window(real_size, channel=channels).to(img1.device)
# calculating the mu parameter (locally) for both images using a gaussian filter
# calculates the luminosity params
pad = window_size//2
mu1 = F.conv2d(img1, window, padding=pad, groups=channels)
mu2 = F.conv2d(img2, window, padding=pad, groups=channels)
mu1_sq = mu1 ** 2
mu2_sq = mu2 ** 2
mu12 = mu1 * mu2
# now we calculate the sigma square parameter
# Sigma deals with the contrast component
sigma1_sq = F.conv2d(img1 * img1, window, padding=pad, groups=channels) - mu1_sq
sigma2_sq = F.conv2d(img2 * img2, window, padding=pad, groups=channels) - mu2_sq
sigma12 = F.conv2d(img1 * img2, window, padding=pad, groups=channels) - mu12
# Some constants for stability
C1 = (0.01 ) ** 2 # NOTE: Removed L from here (ref PT implementation)
C2 = (0.03 ) ** 2
contrast_metric = (2.0 * sigma12 + C2) / (sigma1_sq + sigma2_sq + C2)
contrast_metric = torch.mean(contrast_metric)
numerator1 = 2 * mu12 + C1
numerator2 = 2 * sigma12 + C2
denominator1 = mu1_sq + mu2_sq + C1
denominator2 = sigma1_sq + sigma2_sq + C2
ssim_score = (numerator1 * numerator2) / (denominator1 * denominator2)
if size_average:
ret = ssim_score.mean()
else:
ret = ssim_score.mean(1).mean(1).mean(1)
if full:
return ret, contrast_metric
return ret
- 위 코드에서
gaussian함수는 가우시안 분포를 출력합니다. 다음과 같습니다.
gauss_dis = gaussian(11, 1.5)
print("Distribution: ", gauss_dis)
# Distribution: tensor([0.0010, 0.0076, 0.0360, 0.1094, 0.2130, 0.2660, 0.2130, 0.1094, 0.0360, 0.0076, 0.0010])
print("Sum of Gauss Distribution:", torch.sum(gauss_dis))
# Sum of Gauss Distribution: tensor(1.)
- 위 가우시안 분포를 이용하여 이미지의 local 영역을 순회하는
window를 생성해야 합니다. 이 때,create_window함수를 사용합니다. create_window함수를 보면 동일한 값의 1D gaussian distribution (N) 을 cross product하여 (N, N) 크기의 2D로 window로 만들고 channel 수 만큼 복사하여 확장합니다.- 아래 코드에서는 (11, 11) 크기의 window 를 channel 방향으로 3 만큼 복사합니다.
window = create_window(11, 3)
print(window.shape)
# torch.Size([3, 1, 11, 11])
F.conv2d연산을 보면 생성된 window를 순회하면서 local 영역의 평균과 표준편차를 구하도록 되어있습니다.F.conv2d의 첫번째 인자는 입력으로(B, C, H, W)의 크기를 가지고 두번째 인자는 convolution 연산을 위한 weight로(#num_filter, channel, H, W)의 크기를 가집니다.window = create_window(11, 3)으로 window를 생성하면 사이즈가torch.Size([3, 1, 11, 11])가 되므로 (channel=1, H=11, W=11) 크기의 필터가 3개 있다는 뜻입니다.- 이와 같은 입력과 필터의 연산으로 평균과 표준편차를 local 영역 단위로 구하여 전체 SSIM을 구하게 됩니다.
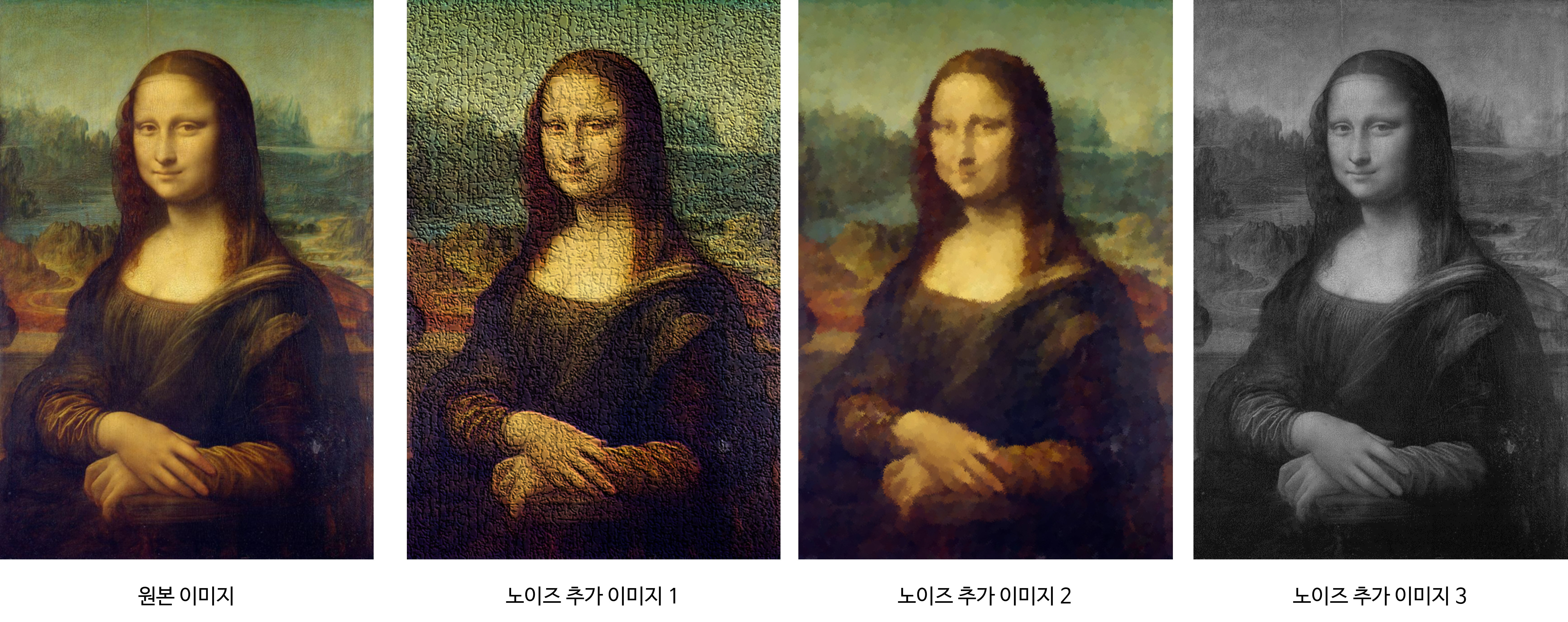
- 위 이미지의 가장 왼쪽부터 첫번째 이미지가 원본이고 2 ~ 4번째 이미지는 원본 이미지에 노이즈를 추가한 케이스 입니다.
- 위 코드를 이용하여 (원본, 두번째 이미지), (원본, 세번째 이미지), (원본, 네번째 이미지) 간의 SSIM을 구하면 아래와 같습니다.
load_images = lambda path, h, w: cv2.resize(cv2.cvtColor(cv2.imread(path, cv2.IMREAD_UNCHANGED), cv2.COLOR_BGR2RGB), ((w, h)))
tensorify = lambda x: torch.Tensor(x.transpose((2, 0, 1))).unsqueeze(0).float().div(255.0)
img_tensor = tensorify(load_images("origin.png", 400, 300))
noise1_tensor = tensorify(load_images("noise1.png", 400, 300))
noise2_tensor = tensorify(load_images("noise2.png", 400, 300))
noise3_tensor = tensorify(load_images("noise3.png", 400, 300))
print(ssim(img_tensor, noise1_tensor), ssim(img_tensor, noise2_tensor), ssim(img_tensor, noise3_tensor))
# tensor(0.2894) tensor(0.7756) tensor(0.8177)
- 위 코드 결과 원본 이미지와 가장 마지막 이미지가 SSIM 기준으로 가장 유사한 것을 확인할 수 있습니다.
SSIM의 skimage에서의 사용법
- 참조 : https://scikit-image.org/docs/stable/api/skimage.metrics.html#skimage.metrics.structural_similarity
- 마지막으로
skimage를 이용하여 구하는 방법에 대하여 알아보도록 하겠습니다. 학습에 사용이 아니라 단순히SSIM스코어를 구하는 데 사용하려면 아래 코드와 같이 간단히 사용해도 무방합니다.
- 위 그림과 같이 4개의 이미지가 있고 가장 왼쪽이 원본 이미지인
origin, 그리고 그 다음 이미지 부터는 노이즈가 섞여있는 이미지로 각각 noise1, noise2, noise3 이라고 해보겠습니다. - 아래 코드에서
ssim함수에서channel_axis는 RGB와 같이 채널이 여러개 존재할 때, 그 채널의 axis 인덱스를 명시하는 것이며full은 SSIM 스코어 뿐 아니라 평균을 구하기 이전의 픽셀 단위의 계산 결과도 모두 포함하여 출력하도록 합니다. 이 중간 출력 결과를 통해 두 이미지에 어떤 차이가 있는 지 시각화 해서 볼 수 있습니다. win_size옵션을 추가로 입력하면 로컬 영역에서 SSIM을 구하도록 할 수 있습니다.
import cv2
import matplotlib.pyplot as plt
from skimage.metrics import structural_similarity as ssim
origin = cv2.cvtColor(cv2.imread("origin.png"), cv2.COLOR_BGR2RGB)
noise1 = cv2.cvtColor(cv2.imread("noise1.png"), cv2.COLOR_BGR2RGB)
noise2 = cv2.cvtColor(cv2.imread("noise2.png"), cv2.COLOR_BGR2RGB)
noise3 = cv2.cvtColor(cv2.imread("noise3.png"), cv2.COLOR_BGR2RGB)
ssim_1, diff1 = ssim(origin, noise1, channel_axis=2, full=True)
diff1 = (diff1 * 255).astype("uint8")
# plt.imshow(diff1)
ssim_2, diff2 = ssim(origin, noise2, channel_axis=2, full=True)
diff2 = (diff2 * 255).astype("uint8")
ssim_3, diff3 = ssim(origin, noise3, channel_axis=2, full=True)
diff3 = (diff3 * 255).astype("uint8")
print(ssim_1, ssim_2, ssim_3)
# 0.21075336301148573 0.6888119020545118 0.7808179172891382
ssim_1, diff1 = ssim(origin, noise1, channel_axis=2, win_size=11, full=True)
diff1 = (diff1 * 255).astype("uint8")
ssim_2, diff2 = ssim(origin, noise2, channel_axis=2, win_size=11, full=True)
diff2 = (diff2 * 255).astype("uint8")
ssim_3, diff3 = ssim(origin, noise3, channel_axis=2, win_size=11, full=True)
diff3 = (diff3 * 255).astype("uint8")
print(ssim_1, ssim_2, ssim_3)
# 0.23226598957553168 0.7078116166774144 0.7831195478428952
- 위 SSIM의 결과를 보면 원본 이미지와 노이즈 추가 이미지3의 SSIM이 0.78로 가장 유사하며 원본 이미지와 노이즈 추가 이미지1의 SSIm이 0.21(0.23)으로 가장 차이가 있는 것을 확인할 수 있습니다.