11. Detection and Segmentation
2018, Jan 11
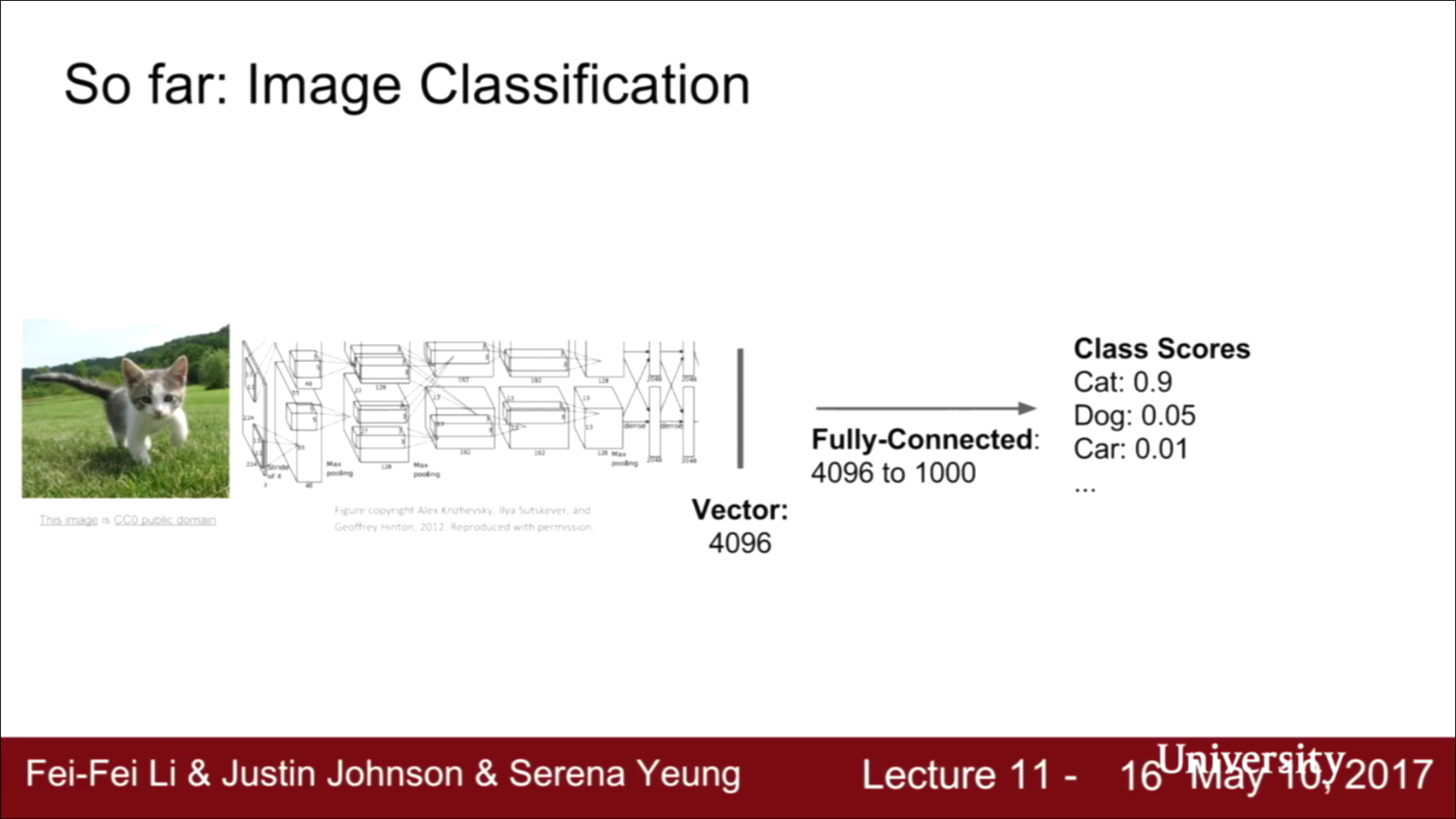
- 이 때까지의 수업에서는 주로 Image Classification 문제를 다루었습니다.
- 입력 이미지가 들어오면 Deep ConvNet을 통과하고 네트워크를 통과하면 Feature Vector가 나옵니다. AlexNet이나 VGG의 경우에는 4096차원의 Feature Vector가 생성되었습니다.
- 그리고 최종 Fully Connected Layer에서는 1000개의 클래스 스코어를 나타냅니다. 이 예제에서 1000개의 클래스는 ImageNet의 클래스를 의미합니다.
- 즉, 전체 구조는 입력 이미지가 들어오면 전체 이미지가 속하는 카테고리의 출력입니다.
- 이번 강의에는 Deep Learning을 이용한 이미지 처리의 다양한 Task들에 대하여 알아보도록 하겠습니다.
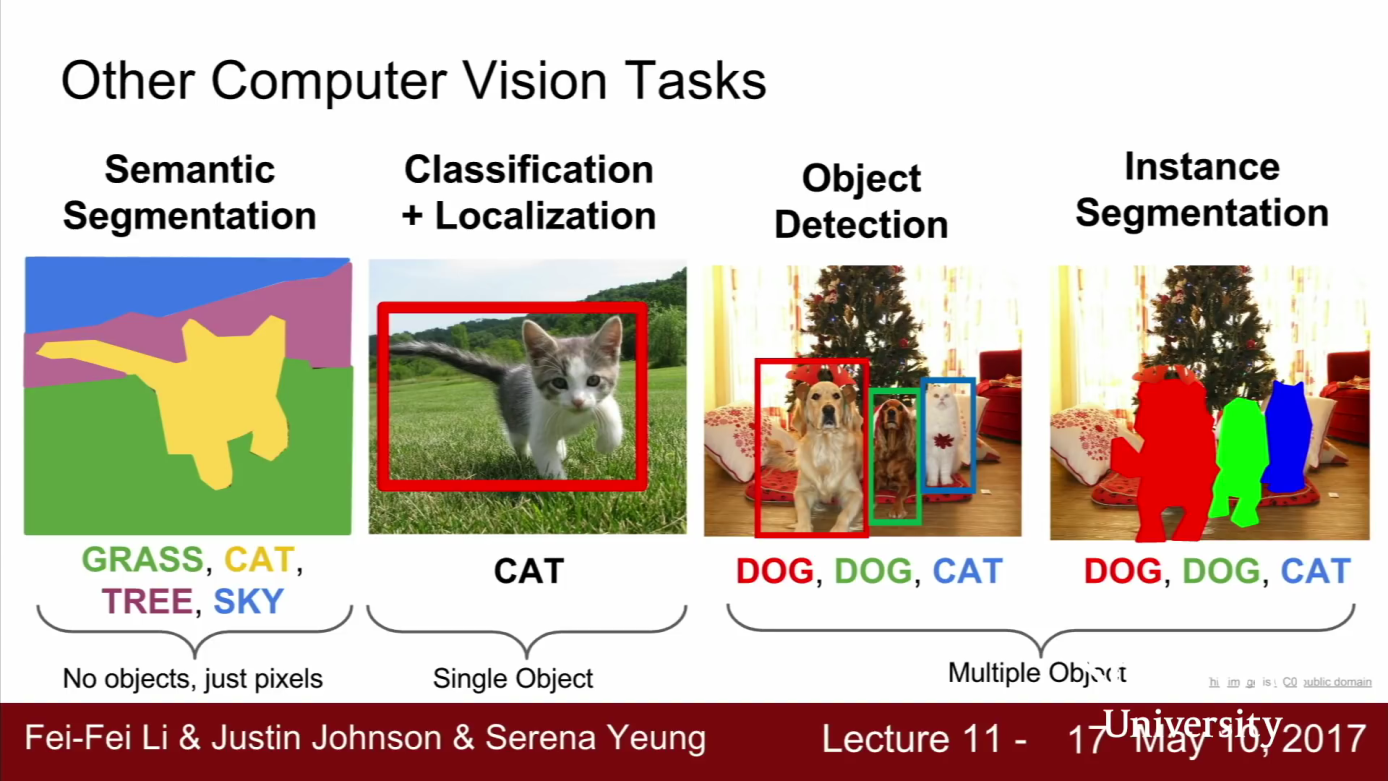
- 이번 강의에서 배울 내용은 크게 4가지 입니다.
- Semantic Segmentation
- Classification + Localization
- Object Dectection
- Instance Segmentation
Semantic Segmentation
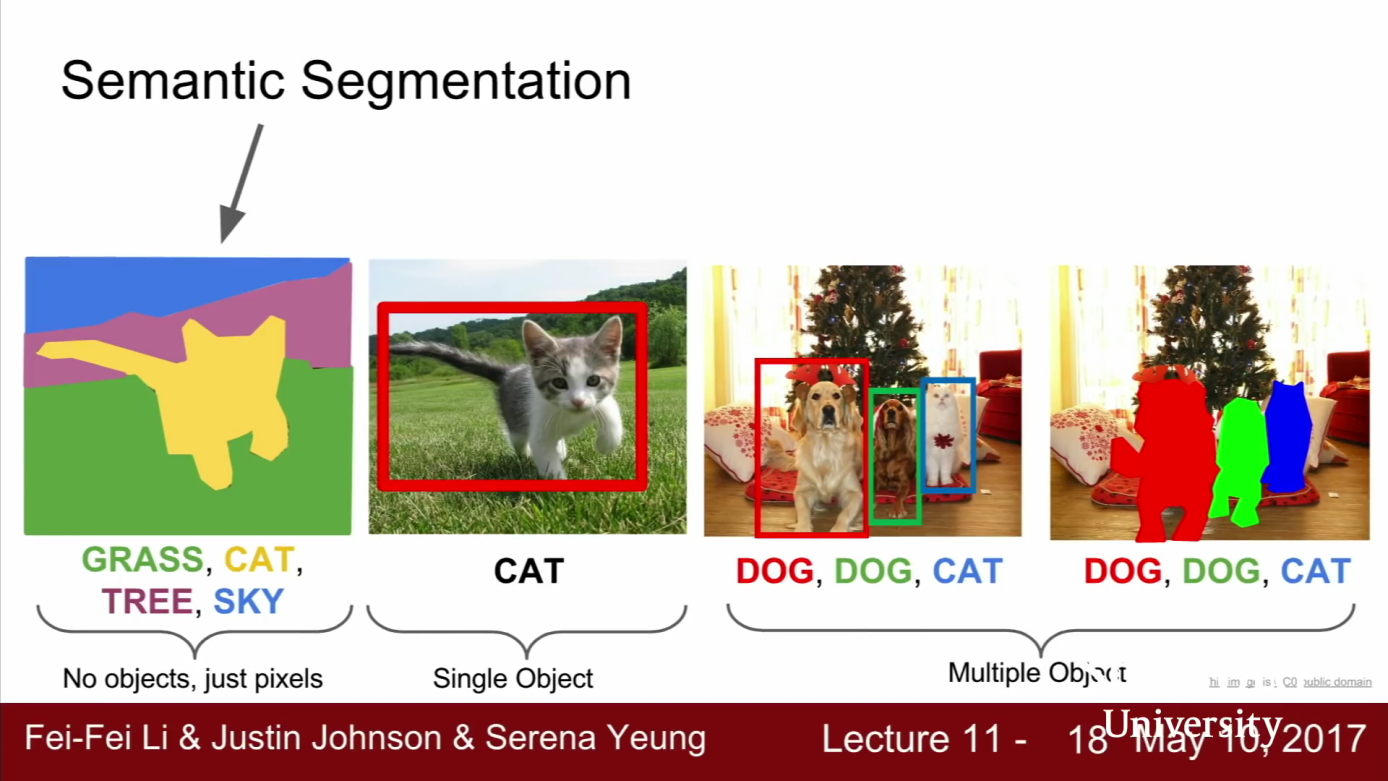
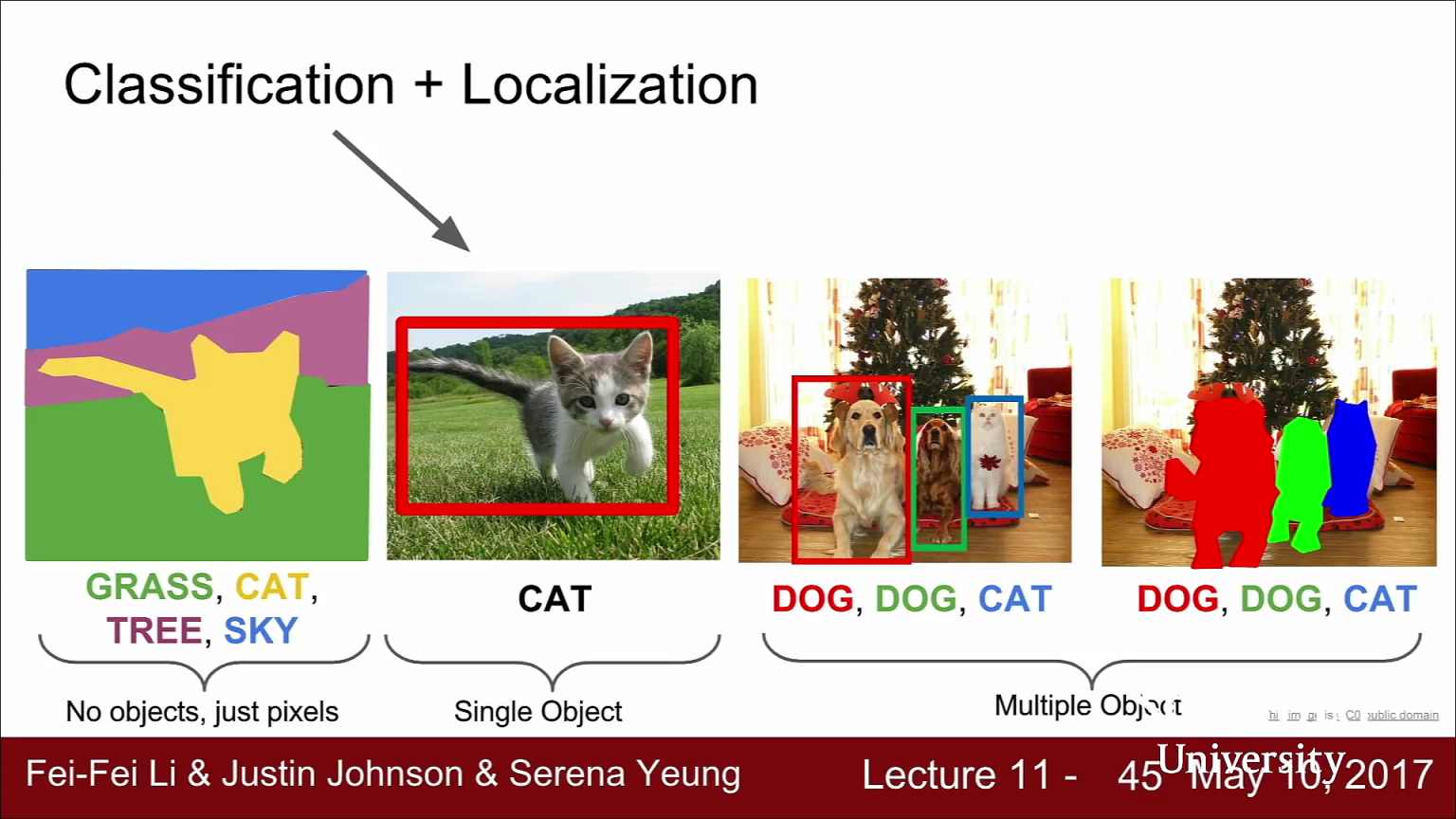
- Semantic Segmentation 문제에서는 입력은 이미지이고 출력으로 이미지의 모든 픽셀에 카테고리를 정합니다.
- 예를 들어 위 슬라이드의 예제를 보면 입력은 고양이 입니다.
- 출력은 모든 픽셀에 대하여 그 픽셀이 고양이, 잔디, 하늘, 나무, 배경인지를 결정합니다.
- Semantic Segmentation에서도 Classification 처럼 카테고리가 있습니다. 하지만 차이점은 Classification처럼 이미지 전체에 카테고리 하나가 아니라 모든 픽셀에 카테고리가 매겨집니다.
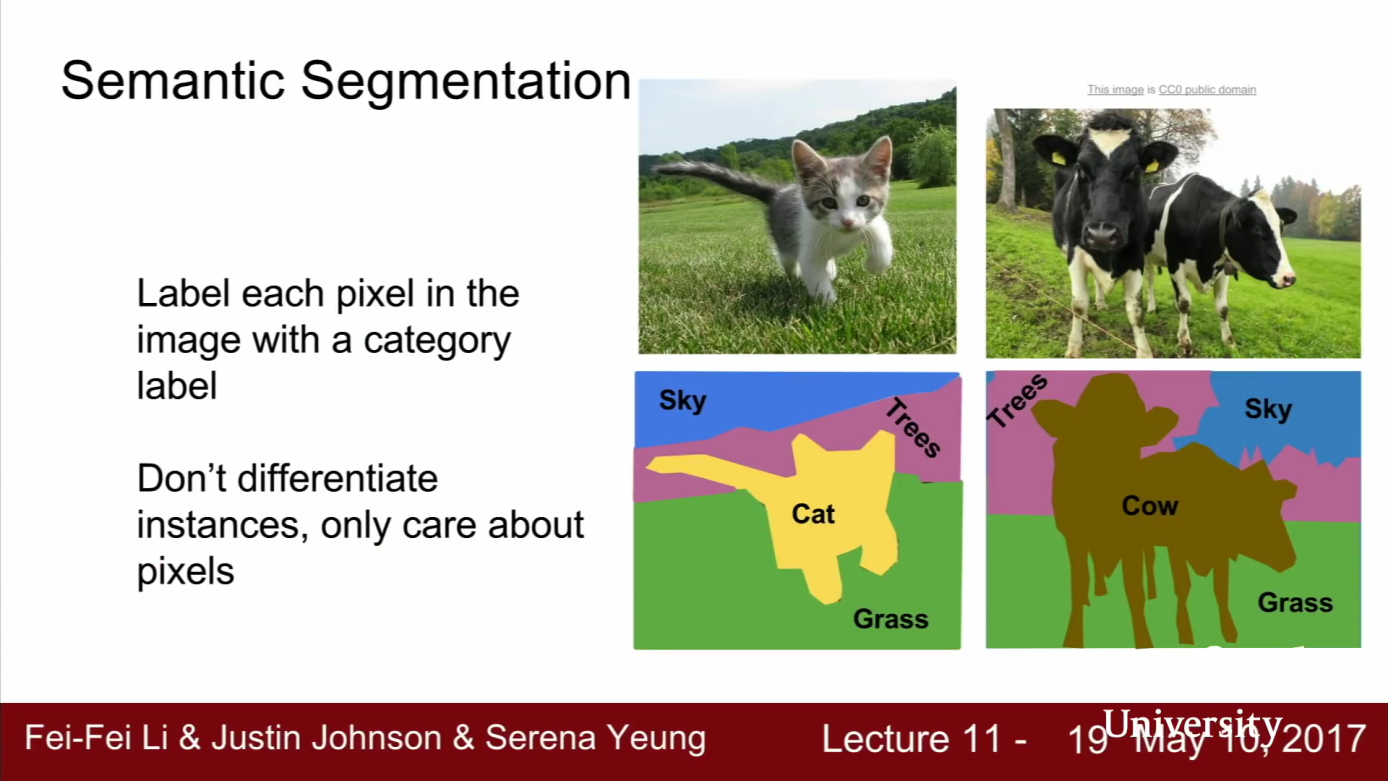
- Semantic Segmentation은 개별 객체를 구별하지 않습니다.
- 위 슬라이드의 Semantic Segmentation 결과를 보면 픽셀의 카테고리만 구분해 줍니다. 즉, 오른쪽 슬라이드의 결과를 보면 소 2마리가 있는데 2마리 각각을 구분할 수는 없습니다. 이것은 Semantic Segmentation의 단점이고 나중에 배울 Instance Segmentation에서 이 문제를 해결할 수 있습니다.
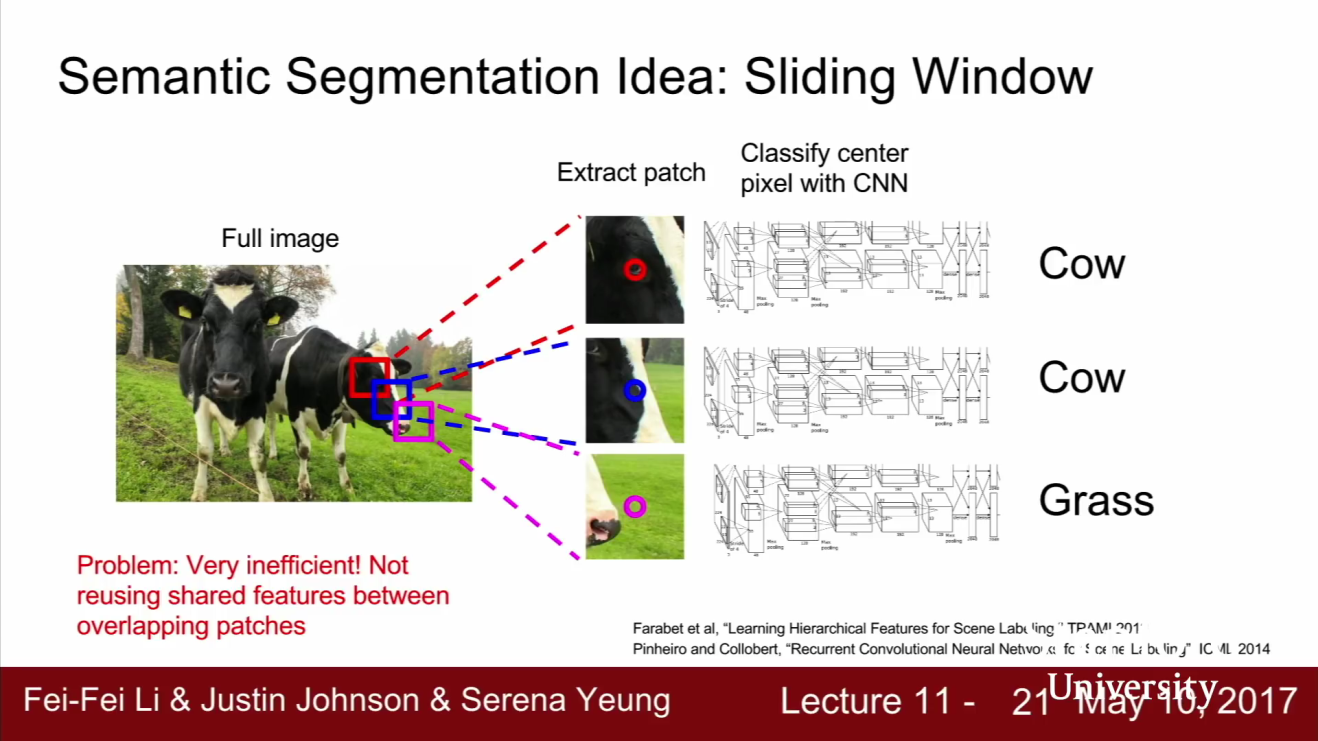
- Semantic Segmentation 문제에 접근해 볼 수 있는 방법 중 하나는 Classification을 통한 접근 방법입니다. Semantic Segmentation을 위해서 Classification 모델을
Sliding Window를 이용하여 적용해 볼 수 있습니다. - 먼저 입력 이미지를 아주 작은 단위로 쪼갭니다. 위 슬라이드의 예제에서는 소의 머리 주변에서 영역 세개를 추출하였습니다. 이 작은 영역만을 가지고 classification 문제를 푼다고 가정하여 해당 영역이 어떤 카테고리에 속하는지 알아볼 수 있습니다.
- 즉, 이미지 한장을 분류하기 위해서 만든 모델을 이용해서 이미지의 작은 영역을 분류하게 할 수 있습니다. 그러나 이 방법이 어느 정도는 동작할 지 모르겠지만 그렇게 좋은 방법은 아닙니다. 왜냐하면 계산 비용이 굉장히 많이 들기 때문입니다.
- 모든 픽셀에 대하여 작은 영역으로 쪼개고, 이 모든 영역을 forward/backward pass 하는 일은 상당히 비효율적입니다. 먼저 계산량 측면에서도 상당히 비효율적일 뿐 아니라 공간 상에서 공유하는 서로 다른 feature들을 공유해서 사용할 수도 없습니다.
- 그리고 서로 다른 영역이라도 인접해 있으면, 어느 정도 겹쳐져 있기 때문에 특징들을 공유할 수 있습니다. 이렇게 영역을 분할하는 경우에도 영역들끼리 공유할만한 특징들이 아주 많을 것입니다.
- 따라서 각 픽셀마다 개별적으로 classification을 적용하는 방법은 아주 나쁜 방법입니다. 하지만 semantic segmentation을 할 때 가장 쉽게 생각할 수 있는 아이디어 이기도 합니다.
- 슬라이딩 윈도우 방법보다 조금 더 개선된 방법으로
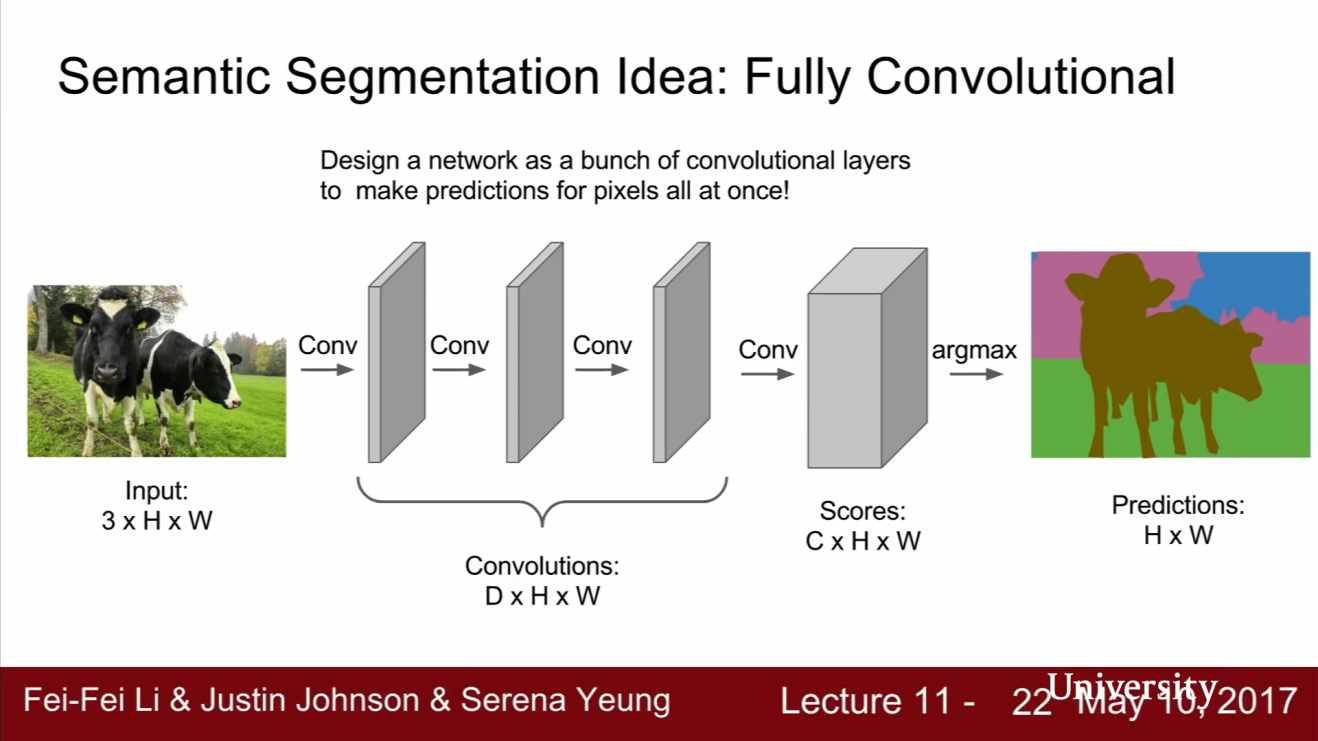
Fully Convolutional Network가 있습니다. - 이 방법은 이미지 영역을 패치 단위로 나누고 독립적으로 분류하는 방법과는 다릅니다. FC layer가 없고 Convolution layer로 구성된 네트워크크 형태입니다.
- 위 그림과 같이 3 x 3 zero padding을 수행하는 Convolution Layer들을 쌓아올리면 이미지의 공간 정보를 손실하지 않을 수 있습니다.
- 이 네트워크의 출력 Tensor는
C x H x W입니다. 여기서C는 카테고리의 수 입니다. - 이 출력 Tensor는 입력 이미지의 모든 픽셀 값에 대하여 classification score를 매긴 값입니다.
- 이 네트워크를 학습시키려면 먼저 모든 픽셀의
classification loss를 계산하고 평균 값을 취합니다. 그리고 기존처럼 back propagation을 수행하면 됩니다.
- 이러한 방법을 사용하려면 training data을 만들 때 각 픽셀마다 classification을 한 데이터가 있어야 합니다. 따라서 training data를 만들 때에도 상당히 큰 비용이 발생하게 됩니다. classification 문제는 한 장의 이미지에 1개의 label값이 필요하지만 segmentation 문제에서는 이미지의 해상도에 일치하는 label 값이 필요합니다. 예를 들어 100 x 100 크기의 이미지라면 10,000개의 label 값이 필요합니다.
- segmentaion 문제에서는 각 픽셀 마다 classification을 해야하므로 모든 픽셀 출력값에 대하여 Cross Entropy를 적용해야 합니다.
- 따라서 출력의 모든 픽셀에는 Ground Truth가 반드시 존재합니다. 출력의 모든 픽셀과 Ground Truth 간의 Cross Entropy를 계산하며 이 때 계산한 값들을 모두 더하거나 평균화시켜서
Loss를 계산할 수 있습니다. 또는 Mini-batch 단위로 계산할 수도 있습니다. - 따라서 모든 픽셀의 카테고리를 알고 있어야 데이터셋을 만들 수 있고 학습할 수도 있습니다.
- 이 모델은 하이퍼파라미터만 잘 조절해서 학습시켜주면 비교젹 잘 동작합니다.
- 하지만 위 그림과 같은 모델의 단점은 입력 이미지의 Spatial size를 계속 유지시켜주어야 합니다. 위 그림을 보면 입력의 height, width 사이즈와 중간 레이어의 height, width 사이즈 그리고 출력의 height, width 사이즈 까지 모두 같습니다.
- 만약 이 네트워크에 고해상도 이미지가 입력으로 들어오게 되면 계산량과 메모리가 상당히 커져서 감당하기 어려운 계산량이 될 수 있습니다.
- 왜냐하면 height, width의 크기도 큰 반면 중간 레이어 들의 채널 수가 늘어나는 구조이기 때문에 기하급수 적으로 계산량이 늘어나기 때문입니다.
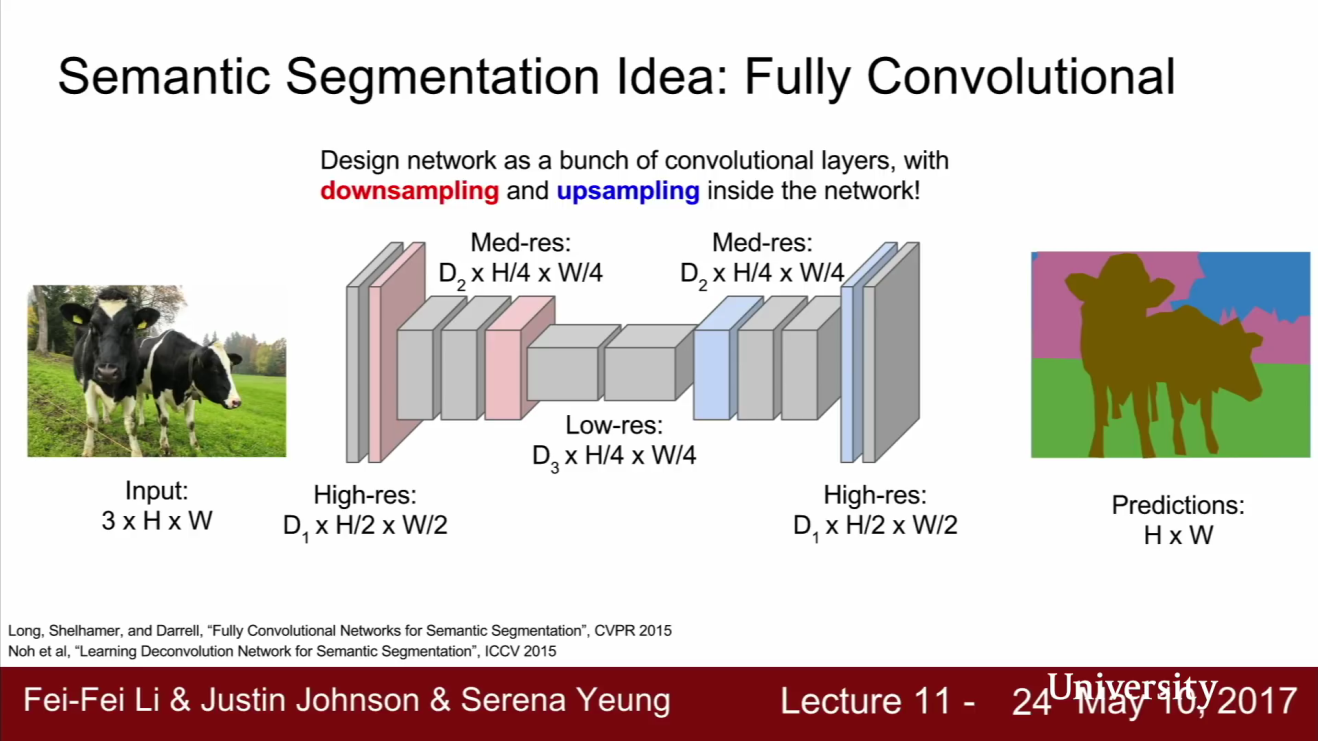
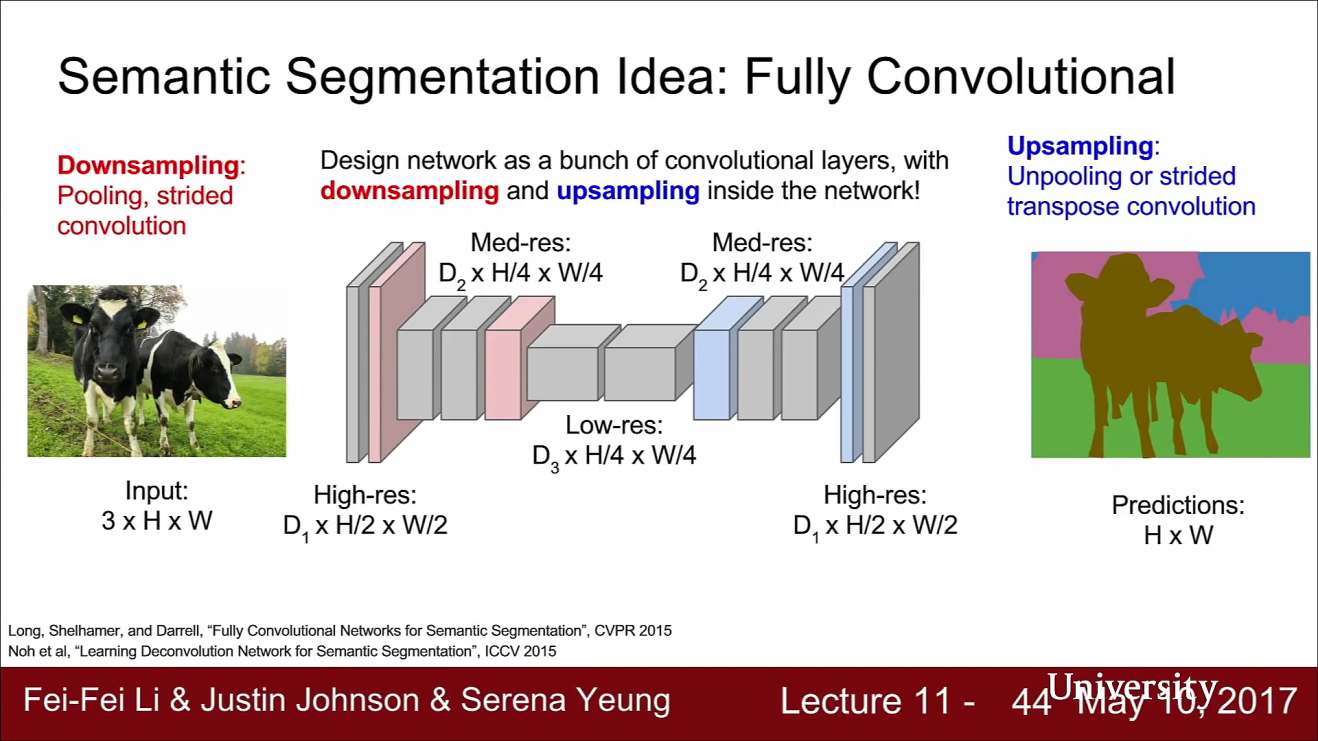
- 따라서 spatial size를 유지해야 하는 구조 대신에 위 슬라이드와 같은
downsampling/upsampling구조를 사용하는 것이 대부분입니다. - 위 슬라이드를 보면 feature map을 downsampling/upsampling 을 합니다.
- 즉, spatial resolution 전체를 가지고 Convolution을 수행하기 보다는 original resolution에서는 conv layer는 소량만 사용합니다. 그리고
max pooling,stride convolution등으로 feature map을 downsample 합니다. - 위 구조는 classification network와 구조가 유사하게 보입니다. 하지만 차이점이 있습니다. classification에서는 FC layer가 있었습니다. 하지만 위 슬라이드 방법은 Spatial resolution을 다시 입력 이미지의 크기로 키우기 때문에 FC layer가 삭제되었습니다.
- 입력 - 중간 - 출력 레이어의 해상도를 유지하는 구조 대신에 위 그림과 같은 구조를 사용하면 출력의 해상도는 입력의 해상도와 같아지면서 기존 방식보다
계산 효율이 좋아지는 장점을 갖습니다. 계산 효율이 좋아진 덕분에 더 깊은 레이어 구조를 만드는 데에도 도움이 됩니다.
- 이전 강의에서 다루었던 내용을 살펴보면 Convolutional Networks에서의
Downsampling에 대해서 다루어 본 적이 있을 것입니다. 예를 들어 이미지의 Spatial Size를 줄이기 위한stride conv또는 다양한 pooling들을 다루어 본 적이 있을 것입니다.
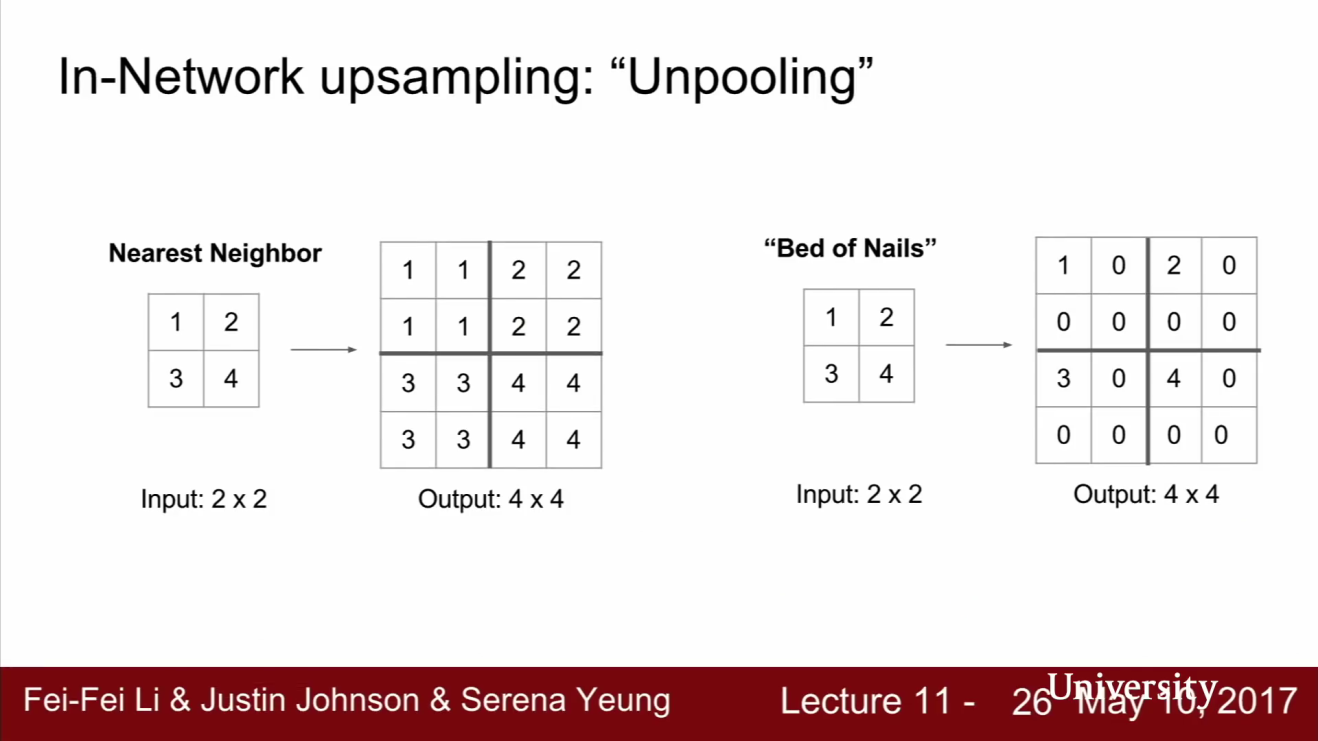
- Upsampling의 방법 중 하나는
unpooling입니다. - unpooling 방법 중에는 슬라이드 왼쪽과 같이
nearest neighborunpooling 방법이 있습니다. - 왼쪽의 nearest neighbor unpooling 예제를 보면 입력은 2 x 2 그리드이고 출력은 4 x 4 그리드입니다. 2x2 stride nearest neighbor unpooling은 해당하는 receptive field 값을 그냥 복사합니다.
- 또 다른 방법으로는
bed of nailsunpooling 이라는 것이 있습니다. 이 방법은 unpooling region에만 값을 복사하고 다른 곳에는 모두 0을 채워넣습니다. - 이 경우 하나의 요소를 제외하고 모두 0으로 만듭니다. 이 예제에서는 왼쪽 위에만 값이 있고 나머지는 0입니다. bed of nails 라는 표현의 유래는 zero region은 평평하고 non-zero region은 바늘처럼 뾰족하게 값이 튀기 때문입니다.
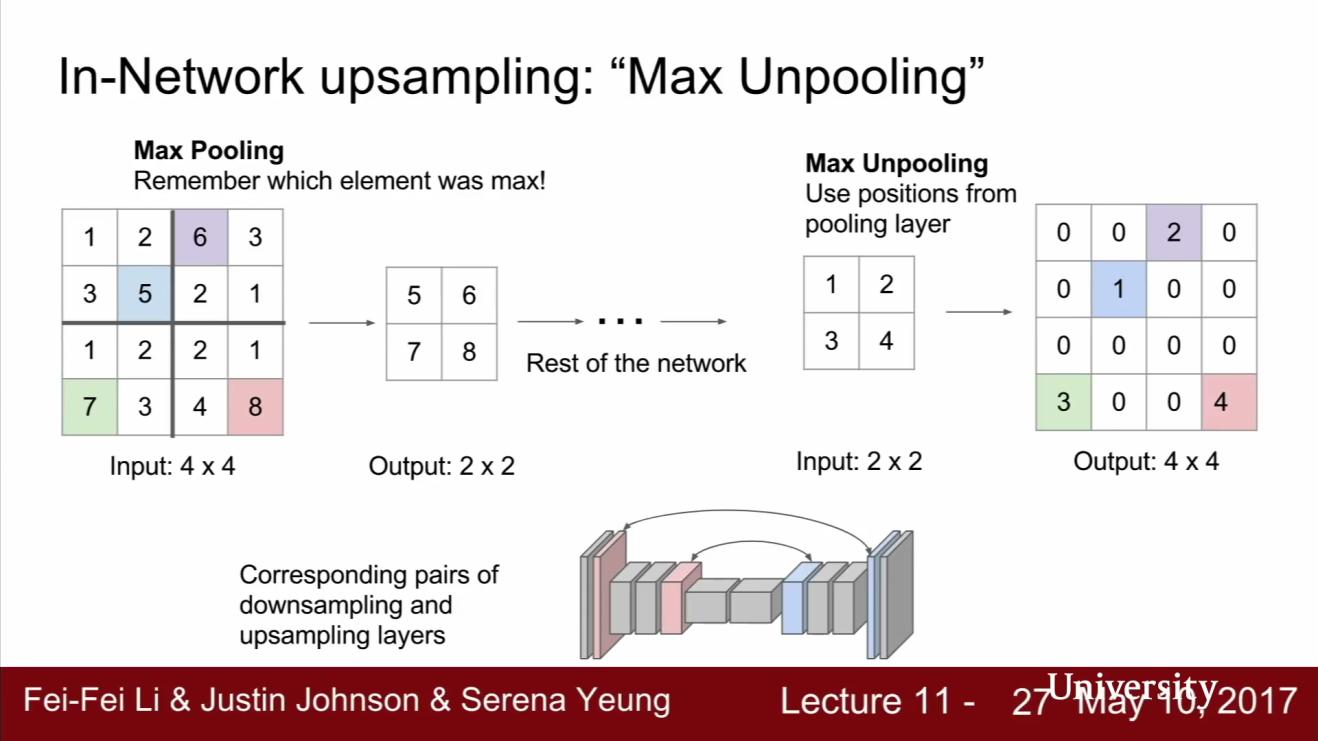
- 또 다른 Upsampling 방법에는
Max unpooling이 있습니다. - 대부분의 네트워크는 대칭적인 경향이 있습니다. 예를 들어 Downsampling/Upsampling의 비율이 대칭적입니다. Max unpooling은 이런 대칭적인 구조에서 사용되는 upsampling 방법입니다.
- 먼저 downsampling 시에는 Max pooling에 사용했던 요소들을 잘 기억하고 있어야 합니다. 다음으로 upsampling 시에는 bed of nails upsampling과 유사하지만 같은 자리에 값들을 넣는게 아니라 이전 maxpooling에서 선택된 위치에 맞게 넣어줍니다. max unpooling을 하고 빈자리에는 0으로 채워줍니다.
- 정리하면 Low Resolution feature map을 High resolution feature map으로 만들어 주는 것인데, 이 때 Low resolution의 값들을 Max pooling에서 선택된 위치로 넣어주는 것입니다.
- 이 방법의 장점은 무엇일까요? semantic segmentation에서는 모든 픽셀들의 클래스를 모두 잘 분류해야 합니다.
- 따라서 예측한 segmentation 결과에서 객체들간의 디테일한 경계가 명확할수록 좋습니다.
- 하지만 Maxpooling을 하게 되면 feature map이 비균일해 집니다. 즉, 공간 정보를 잃게 되어 픽셀 값들이 어디서 부터 왔는지 알 수 없어 집니다.
- 즉, Maxpooling 후의 feature map만 봐서는 이 값들이 receptive field 중 어디에서 왔는 지 알 수 없습니다.
- 따라서 unpooling 시에 기존 max pooling 에서 뽑아온 자리로 값을 넣어주면, 공간 정보를 조금은 더 디테일하게 다룰 수 있습니다.
- 지금 까지 배운 unpooling의 방법인 bed of nails, nearest neighbor, max unpooling은 고정된 값을 사용하고 별도로 값을 학습하진 않습니다.
- 반면 uppooling 시 고정값이 아닌 학습가능한 값으로 upsampling 하는 방법이 있습니다. 그 방법이
Transpose convolution입니다. - 즉, feature map을 upsampling 할 때, 어떤 방식으로 할 지를 학습할 수 있습니다.
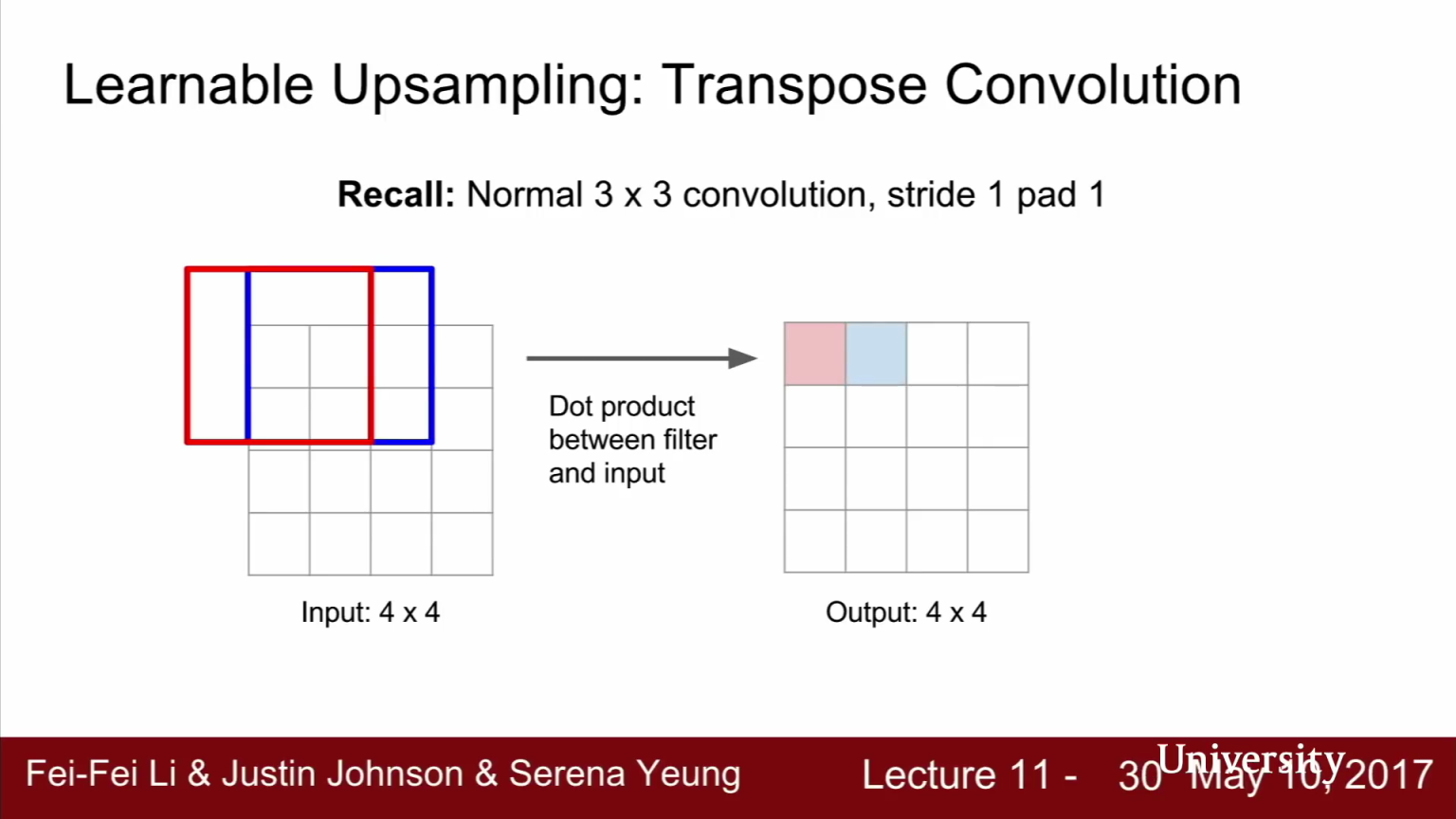
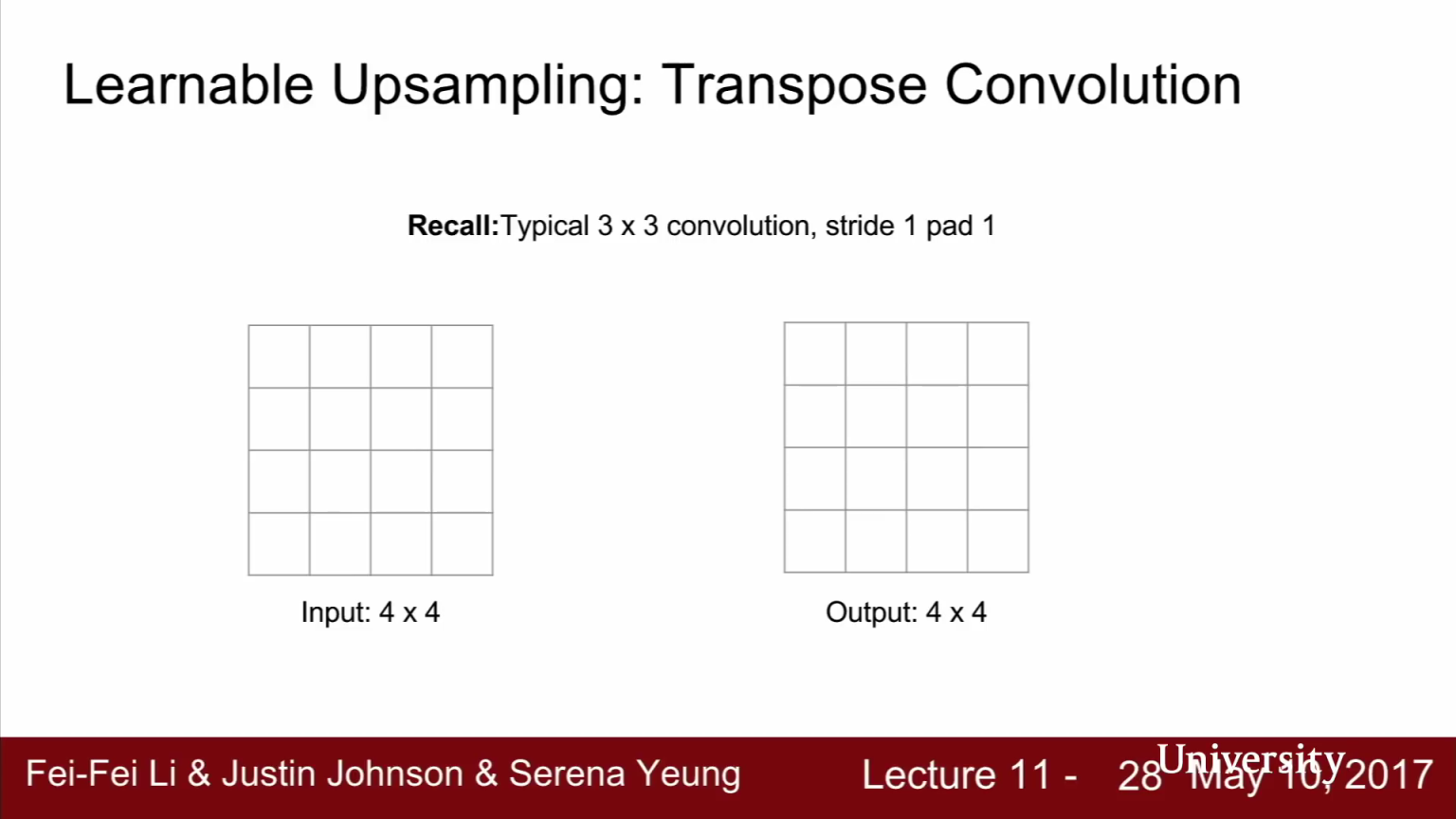
- 먼저 일반적인 3x3(stride = 1, padding = 1)의
convolution filter가 동작하는 방식을 다시 한번 살펴보겠습니다. 위 그림과 같이 입력이 4 x 4이고 출력 또한 4 x 4 인 경우로 예를 들어보겠습니다. - 먼저 3x3 convolution 필터가 있고 이미지와 내적을 수행합니다. 우선 이미지의 좌 상단 구석부터 시작합니다.
- 현재 사용하는 필터가 3 x3 convolution에 stride = 1, padding = 1이므로 각 영역에 대하여 convolution한 결과는 그대로 4 x 4 의 크기를 가지게 됩니다.
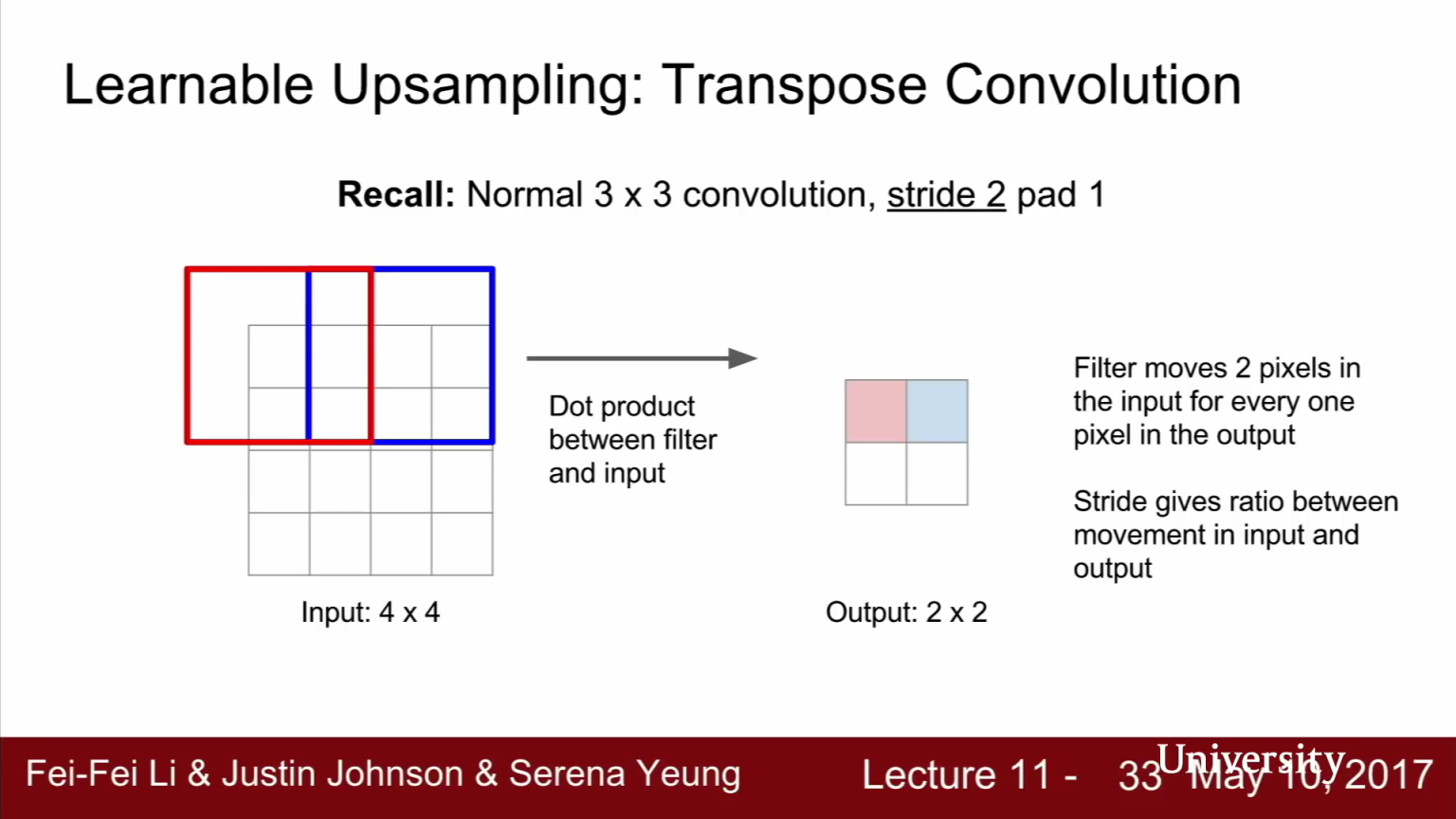
- 이번에는
strided convolution에 대하여 살펴보겠습니다. - strided convolution은 한 픽셀씩 이동하면서 계산하지 않습니다. 출력에서 한 픽셀 씩 움직이려면 입력에서는 두 픽셀 씩 움직여야 합니다. 즉, stdied는 입력/출력에서의 움직이는 거리 사이의 비율이라고 해석할 수 있습니다.
- 따라서 stride=2인 strided convolution은 학습 가능한 방법으로 2배
downsampling하는 것을 의미합니다.
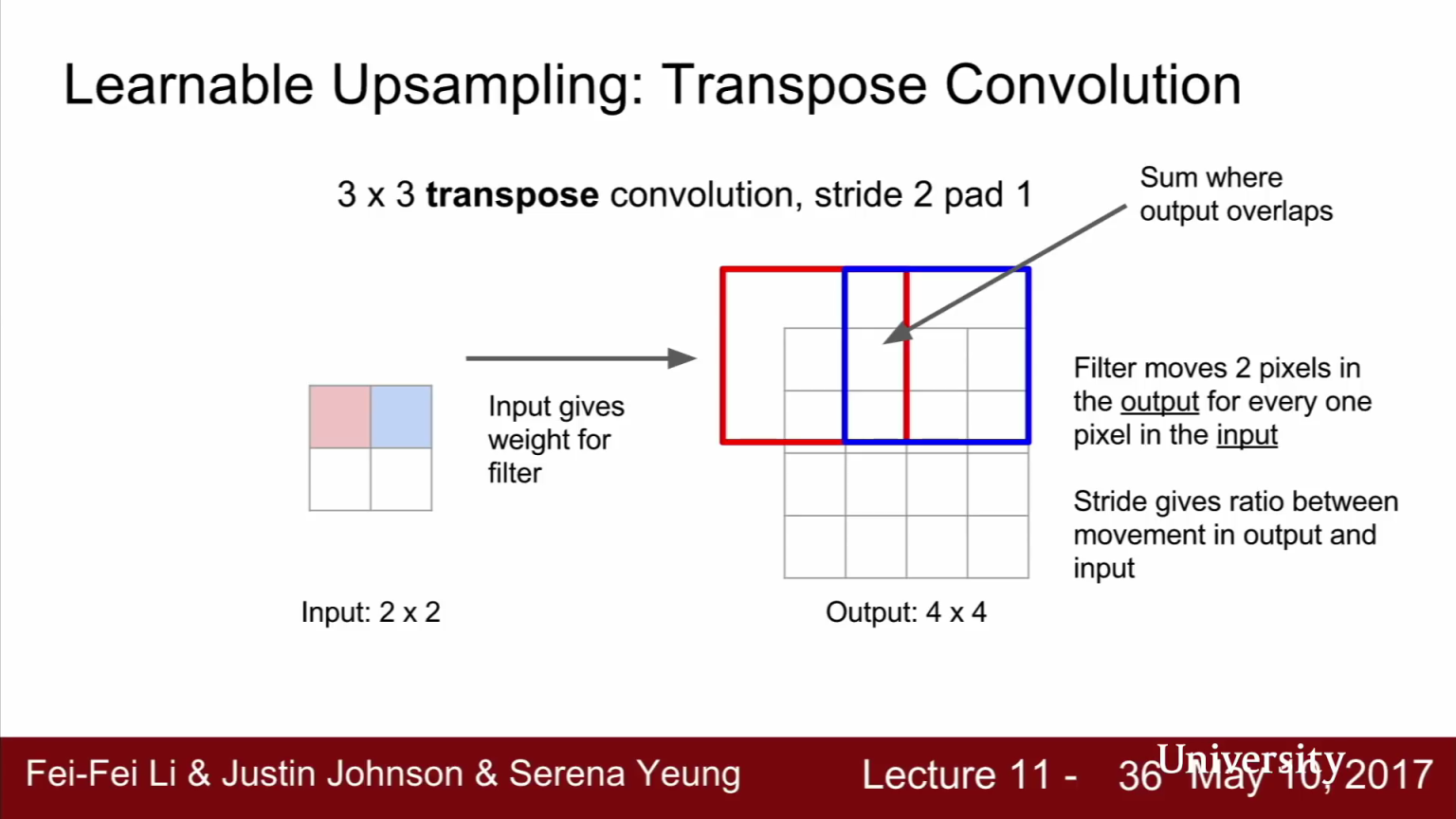
- 반면
Transpose convolution은 stride convolution과 반대의 경우입니다. 입력이 2x2이고 출력이 4x4 입니다. 출력의 크기가 더 커졌습니다. 그러면 과정을 한번 살펴보도록 하겠습니다. - 먼저 입력 feature map에서 값을 하나 선택합니다.
- 선택된 스칼라 값을 3x3 필터와 곱합니다. 그리고 출력의 3x3 영역에 그 값을 넣습니다. (위 오른쪽 그림의 빨간색, 파란색의 3 x 3 영역에 해당합니다.)
- 즉, Transpose convolution에서는 필터와 입력의 내적을 계산하는 것이 아니라 입력 값이 필터에 곱해지는 가중치의 역할을 합니다. 따라서
출력 값은 필터 * 입력 (가중치) 입니다. - 그리고 현재 적용한 Transpose convolution에 stride = 2가 적용 되었기 때문에 Upsampling 시에는 입력에서 한 칸씩 움직이는 동안 출력에서는 두 칸씩 움직입니다.
- 이렇게 가중치가 곱해진 필터 값을 출력 값에 넣어줍니다. 그러면
출력에서는 Transpose convolution 간에 Receptive field가 겹칠 수 있습니다. - 이런 경우에는 간단하게 두 값을 더해줍니다. 이 과정을 반복해서 끝마치면 학습 가능한 upsampling을 수행한 것입니다.
- 앞에서 다룬 다른 방법과 비교하면 Transpose convolution은 Spatial size를 키워주기 위해서 학습된 필터 가중치를 이용한 것입니다.
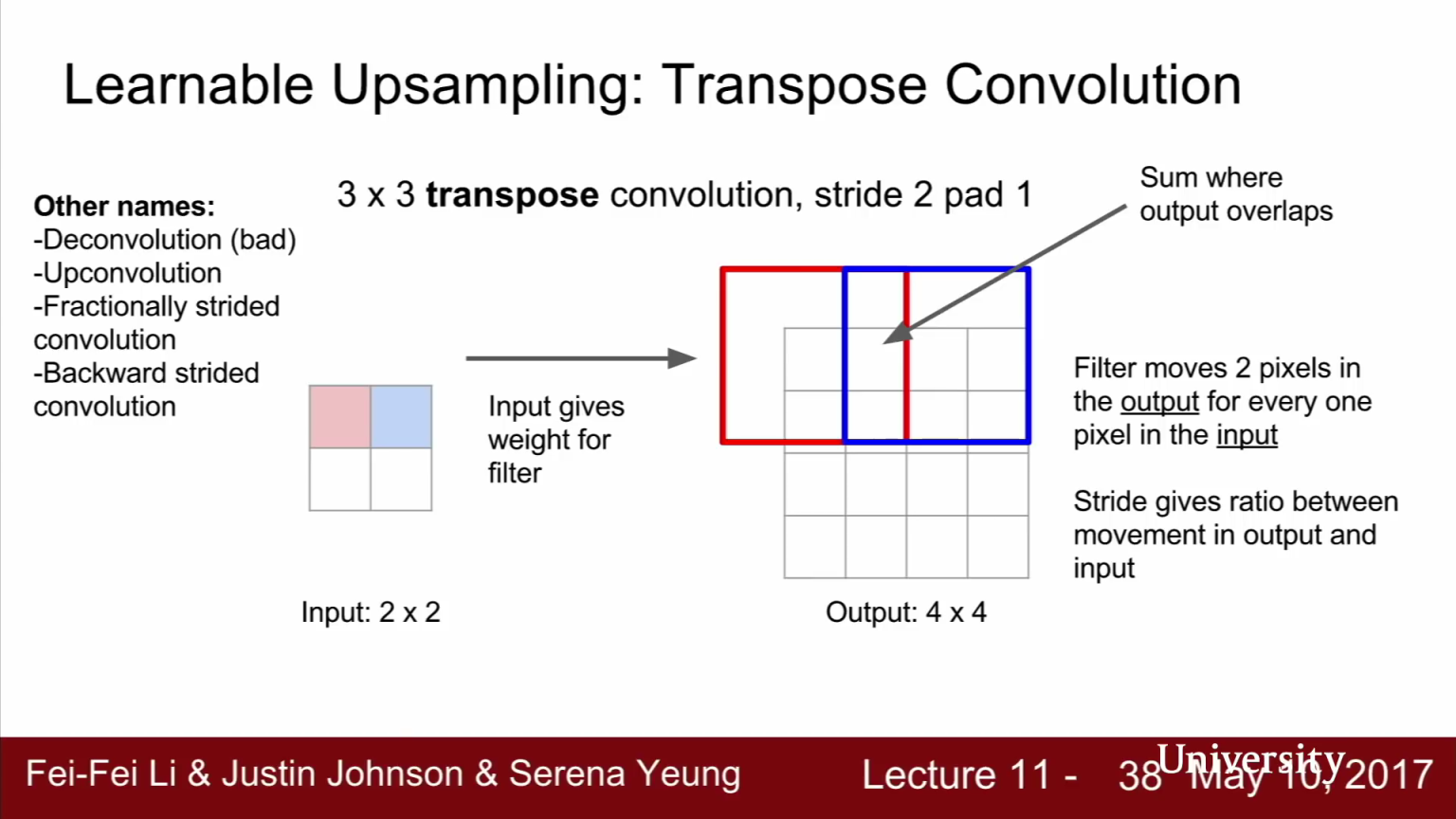
- 이 방법은(Transpose convolution)은 문헌에 따라서 부르는 이름이 다양합니다.
- 간혹 deconvolution이라고 하는데 이 용어는 신호처리 관점에서는 convolution의 역연산을 뜻하므로 혼돈을 주기에 적합하지 않습니다.
Upconvolution이라는 용어도 있고Fractionally strided convolution이라는 용어도 있습니다.- stride를 input/output 간의 크기의 비율로 생각하면 이 예제는 stride 1/2 convolution이라고 볼 수 있습니다. 왜냐하면 input : output = 1 : 2이기 때문입니다.
- 또는
Backward strided convolution이라는 용어로도 불립니다. 왜냐하면 transpose conv의 forward pass를 수학적으로 계산해 보면 일반 Convolution의 backward pass와 수식이 동일하기 때문입니다.
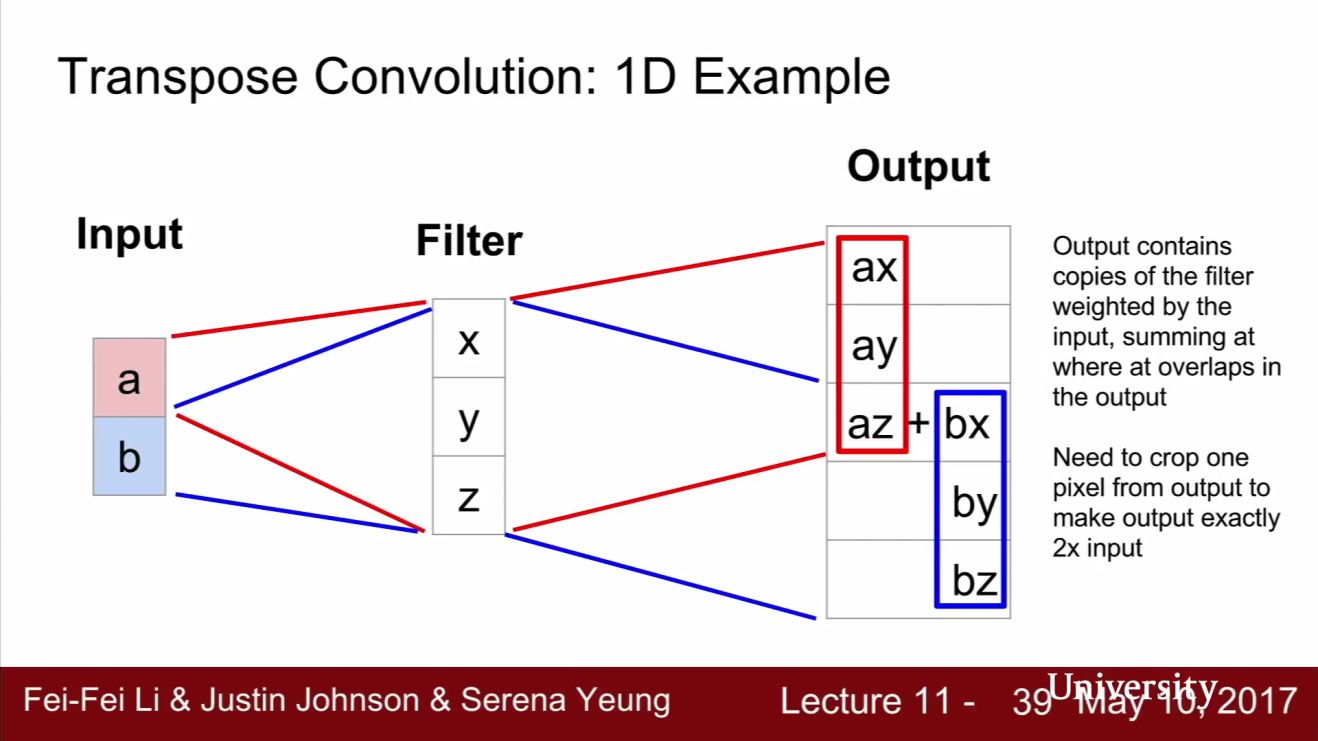
- Transpose Convolution의 구체적인 예시를 살펴보겠습니다. 이해를 돕기 위해서 1D example에 대하여 살펴보겠습니다.
- 이 예제에서는 1차원에서 3x1 Transpose convolution을 수행합니다.
- 필터에는 세 개의 숫자가 있습니다 : x, y, z
- 입력은 두 개의 숫자가 있습니다 : a, b
- 출력값을 계산해 보면 입력이 가중치로 쓰이고 필터에 곱해집니다. 그리고 이 값을 출력에 넣습니다.
- 그리고 Receptive Field가 겹치는 부분은 그냥 더해줍니다.
- 이 연산을 하다 보면 왜 이 연산이 Transposed Conv 라는 이름이 붙었는지 궁금하실 수 있습니다.
- Transposed 라는 이름의 유래는 Convolution 연산 자체를 해석해보면 알 수 있습니다.
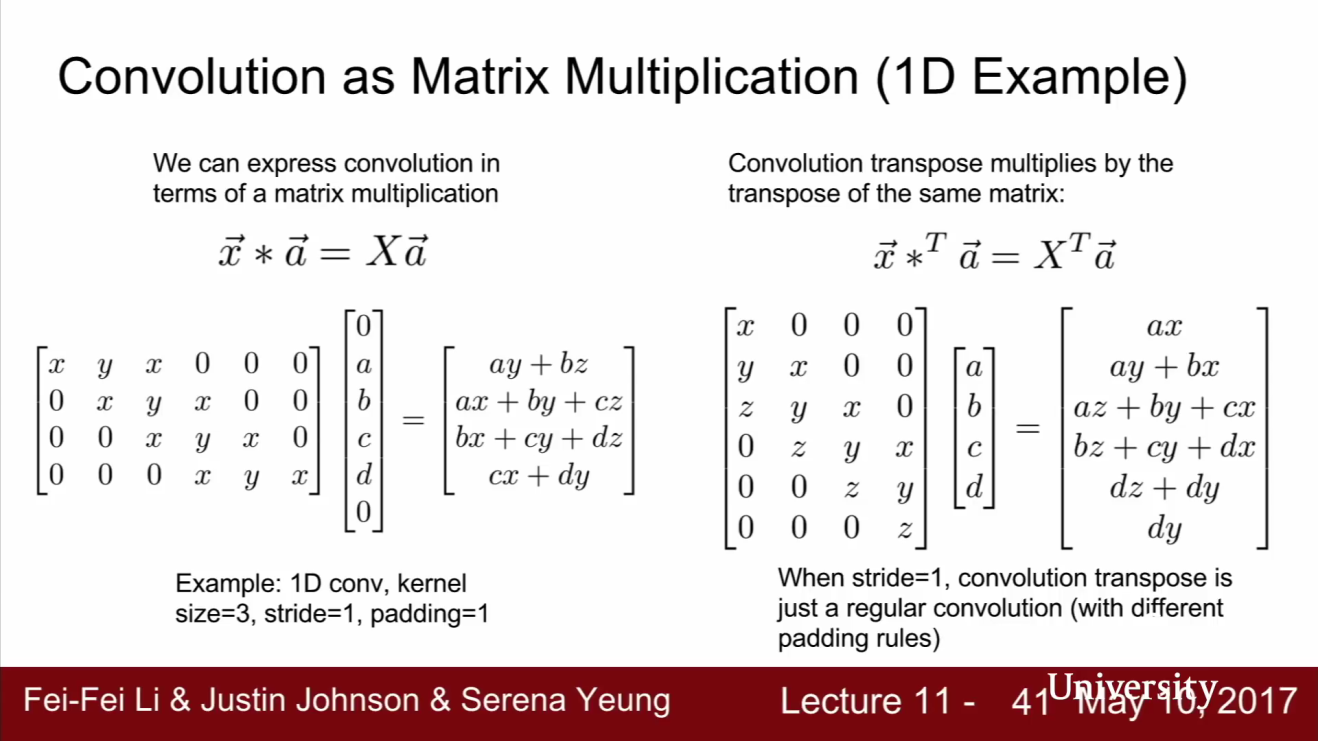
- Convolution 연산은 언제든지
행렬 곱연산으로 나타낼 수 있습니다. - 위 슬라이드의 왼쪽을 보면 간단한 1차원 예제를 볼 수 있습니다. 4 x 6 행렬을 보면 \((x, y, z)\) 벡터가 위치를 이동하면서 채워져 있는 것을 볼 수 있습니다.
- 슬라이드에서는 오타가 있는데 x, y, x가 아니라 x, y, z 입니다. x, y, z 이외의 자리에는 0으로 채워집니다.
- 위 예는 1D Conv이고 size=3, stride=1, padding=1 입니다.
- convolution 필터인 \(\vec{x}\)는 3개의 원소(\(x, y, z\))를 가지고 있습니다. 그리고 입력 벡터인 \(\vec{a}\)는 4개의 원소(\(a, b, c, d\))를 가지고 있습니다.
- 여기서 3x1 filter & stride=1 convolution 연산을 수행한 행렬곱을 표현하면 위의 슬라이드와 같습니다.
- convolution 계산할 벡터를 행렬식으로 표현한 뒤 \(X\) 라고 표현할 수 있습니다.
- 이렇게 만든 가중치 행렬 \(X\)를 가지고 \(X \cdot a\) 연산을 수행하면 convolution과 결과가 동일합니다.
- 이번에는 슬라이드의 오른쪽과 같이 \(X^{T}\)를 곱하는 형태를 만들어 보겠습니다.
- Transpose Convolution은 Convolution 때와 같은 행렬을 사용해서 행렬곱을 하되 곱할 행렬을 Transpose한 것입니다.
- 즉, 왼쪽의 행렬은 stride 1 convolution이고 오른쪽 행렬은 stride 1 transpose convolution 입니다.
stride=1일 때에는 convolution과 transpose convolution의 연산이 굉장히 비슷해 보입니다.
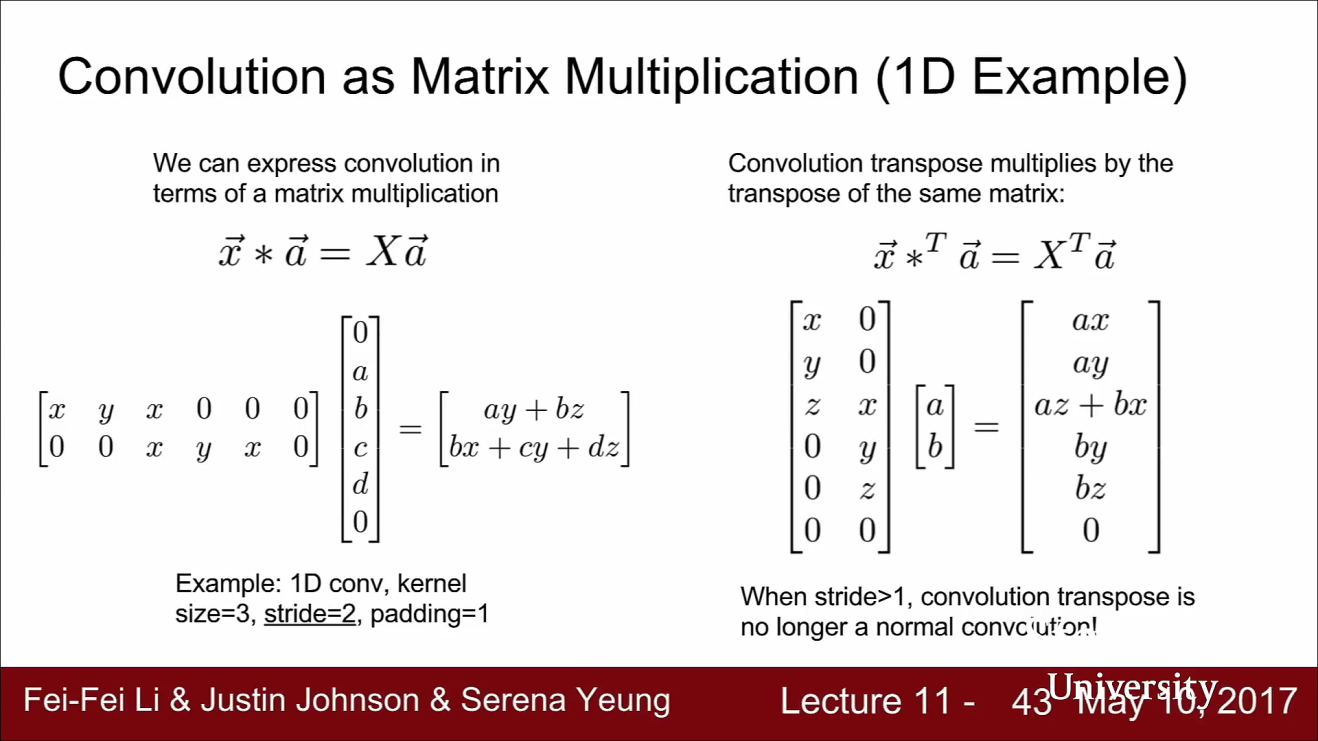
- 하지만
stride > 1인 경우에는 convolution과 transpose convolution의 연산 결과가 많이 달라지는 것을 알 수 있습니다.
- 기본적인 transpose convolution에서는 receptive field가 겹치는 부분은 덧셈을 해주고 있습니다. transpose convolution의 정의에 따라서 receptive filed의 겹치는 부분을 합칠 때 다른 연산이 없이 덧셈을 하였었습니다.
- 하지만 Receptive field가 겹치는 부분을 그냥 sum을 하는 것은 문제가 될 수 있습니다.
- 예를 들어 3x3 stride 2 transpose convolution을 사용하면 checkerboard artifacts가 발생하곤 합니다.
- 관련 논문에서는 4x4 stride 2 또는 2x2 stride 2 transpose convolution을 사용하면 조금 완화된다고는 합니다.
- 다시 Semantic segmentation 으로 돌아가 보겠습니다. 위에서 보이는 Semantic segmentation 구조는 상당히 일반적입니다.
- 네트워크 내부에 downsampling/upsampling을 하는 거대한 convolution network가 있습니다.
- 여기서
downsampling은 strided convolution 또는 pooling을 사용합니다. - 그리고
upsampling은 transpose convolution 또는 다양한 종류의 unpooling/upsampling을 사용합니다. 간단하게 interpolation(bilinear) + convolution 하는 방법도 많이 사용됩니다. - 이러한 네트워크 구조를 만든 다음에
모든 픽셀에 대하여 cross entropy를 계산하면 네트워크 전체를 end-to-end로 학습시킬 수 있습니다. - 기본적인 segmentation 문제는 classification 문제를 확장시킨 문제와 유사한 것을 확인해 보았습니다.
Classification + Localization
- 그 다음 다루어 볼 Task는
Classification + Localization입니다. - 이미지 분석을 하다 보면 이미지가 어떤 카테고리에 속하는지 뿐만 아니라 실제 객체가 어디에 있는지를 알고 싶을 수 있습니다. 이 작업은 이미지를 “cat”에 분류하는 것 뿐만 아니라 이미지 내에 cat이 어디에 있는지 네모 박스를 그리는 것입니다.
- Classification + Localization 문제는 Object Detection 문제와는 구분이 됩니다. 왜냐하면 Localization 문제에서는 이미지 내에서 관심있는 객체는 오직 하나라고 가정하기 때문입니다. 기본적으로 이미지 내에 객체 하나만 찾아서 레이블을 매기고 위치를 찾는 문제 입니다.
- 이 문제를 풀때에도 기존의 image classification에서 사용하던 기법들을 고스란히 녹일 수 있습니다.
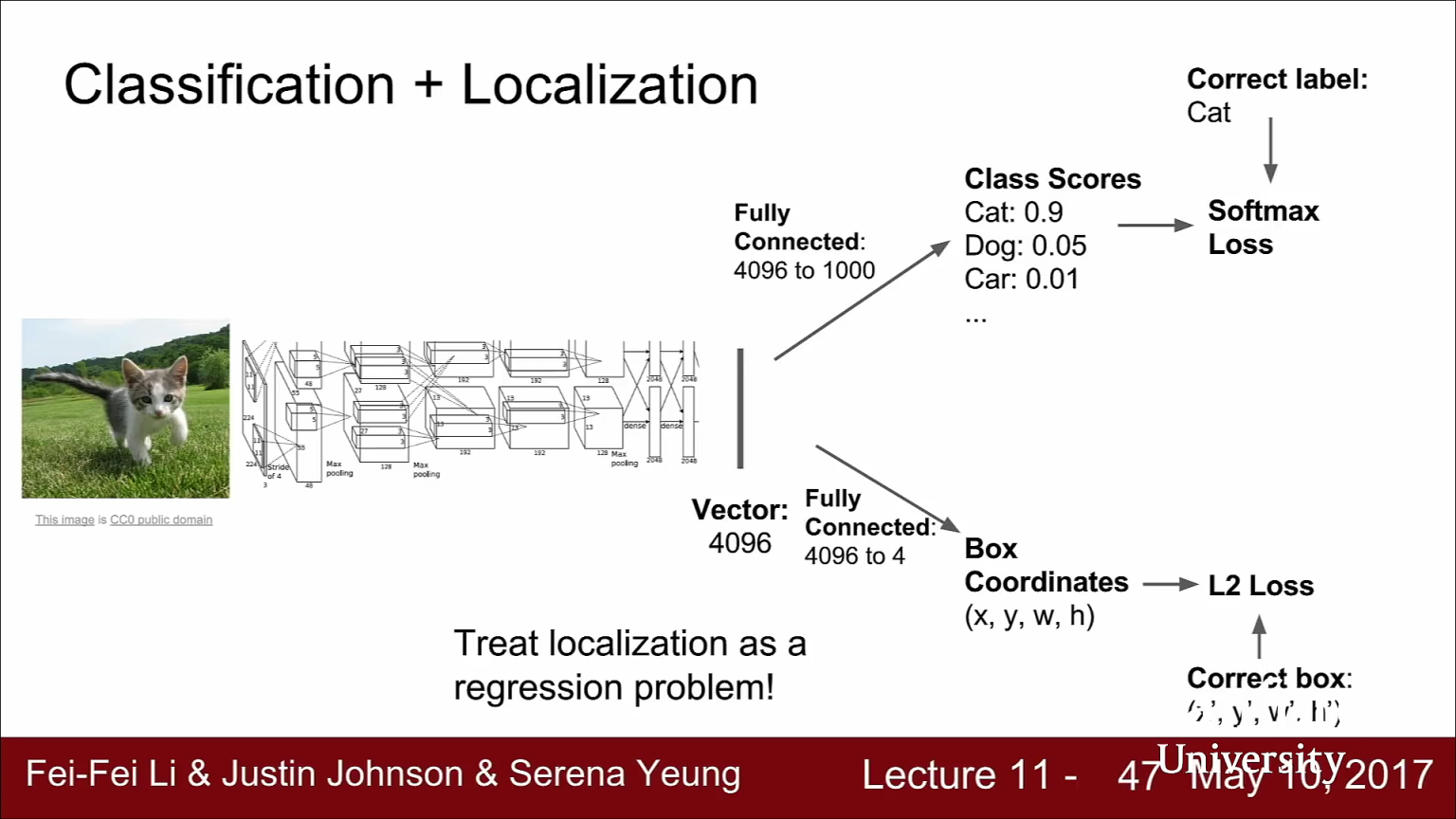
- 아키텍쳐의 기본 구조는 위 슬라이드와 같습니다. 위 슬라이드에서는 예제로 AlexNet을 사용하였습니다.
- 네트워크는 입력 이미지를 받아서 출력을 내보내는 구조는 Classification과 같습니다. 출력 레이어 직전의 FC layer는 Class score로 연결되어서 카테고리를 결정합니다.
- 하지만 여기에서는 FC layer가 하나 더 있습니다. 이는 4개의 원소를 가진 vector와 연결되어 있습니다. 이 4개의 출력 값은 width/height/x/y로 bounding box의 위치를 나타냅니다.
- 이런 방법으로 네트워크는 2가지 출력값을 반환합니다. ① class socre 와 ② 입력 영상 내의 객체 위치의 bounding box 좌표입니다.
- 그리고 이 문제에서는 학습 방법이
fully supervised setting을 가정합니다. 즉, 학습 이미지에는카테고리 레이블과 해당 객체의bounding box의 Ground Truth를 동시에 가지고 있어야 합니다. - 따라서 이 문제에는 두 가지의 Loss function이 있습니다.
- ① 먼저 Class score를 예측하기 위한 softmax loss가 있습니다.
- ② GT(Ground Truth) Bounding Box와 예측한 Bounding Box 좌표 사이의 차이를 측정하는 Loss도 있습니다. 이 Loss는 예측한 box의 좌표와 GT box 좌표간의 차이에 대한
regression loss입니다.
- Localization 문제를 풀면서 오분류한 케이스에 대하여 Bounding box를 학습하는 것에 대한 우려가 있을 수 있습니다.
- 일반적으로 이 문제 또한 학습하면서 정정되기 때문에 괜찮습니다. Classification과 Localization이 동시에 학습되기 때문입니다.
- 하지만 성능을 높이기 위하여 classification이 잘 된 경우에 한해서만 bounding box를 학습 하는 방법을 사용할 수도 있습니다.
- 또 생각할 수 있는 의문점은 Class score의 Loss와 Bounding box에 대한 Loss의 단위가 다를 수 있는데 gradient 시에 같이 계산된다면 문제가 되지 않을 까 입니다.
- 이렇게 두 개의 Loss를 합친 Loss를
Multi-task Loss라고 합니다. - 먼저 gradient를 구하려면 네트워크 가중치들의 각각의 미분값(scalar)을 계산해야 합니다.
- 이제는 Loss가 두 개이니 미분값도 두개이고 이 두개를 모두 최소화 시켜야 합니다.
- 학습을 설정할 때 두 Loss의 가중치를 조절하는 하이퍼파라미터가 있습니다. 두 Loss의 가중치 합이 최종 Loss 입니다. 이 때 사용하는 하이퍼파라미터는 사용자가 설정해 주어야 하는 값으로 적절한 값을 설정하기가 상당히 까다롭습니다.
- 그리고 이 두 Loss의 가중 합에 대한 gradient를 계산하는 것입니다.
- 물론 Localization 문제를 풀 때에도 Transfer Learning을 하는 것은 아주 좋은 방법입니다.
- Transfer Learning의 관점에서 보면 fine tuning을 하면 항상 성능이 좋아지기 때문입니다.
- ImageNet으로 학습시킨 모델을 가지고 데이터셋에 작용한다면 적절한 Fine tuning이 성능 향상에 도움이 될것입니다.
- 실제로 많은 사람들이 사용하는 방법 중 하나는 우선 네트워크를 Freeze하고 Class score와 Bounding box 관련된 두 FC layer를 학습시킵니다.
- 그리고 두 FC layer가 수렴하면 다시 합쳐서 전체 시스템을 Fine tuning 하는 것입니다.
- 지난 시간에는 ImageNet을 예로 들어서 Pre-Trained Network를 소개한 적이 있습니다.
- Bounding Box와 같이 이미지 내의 어떤 위치를 예측한다는 아이디어는 Classification + Localization 문제 이외에도 아주 다양한 문제에도 적용할 수 있습니다.
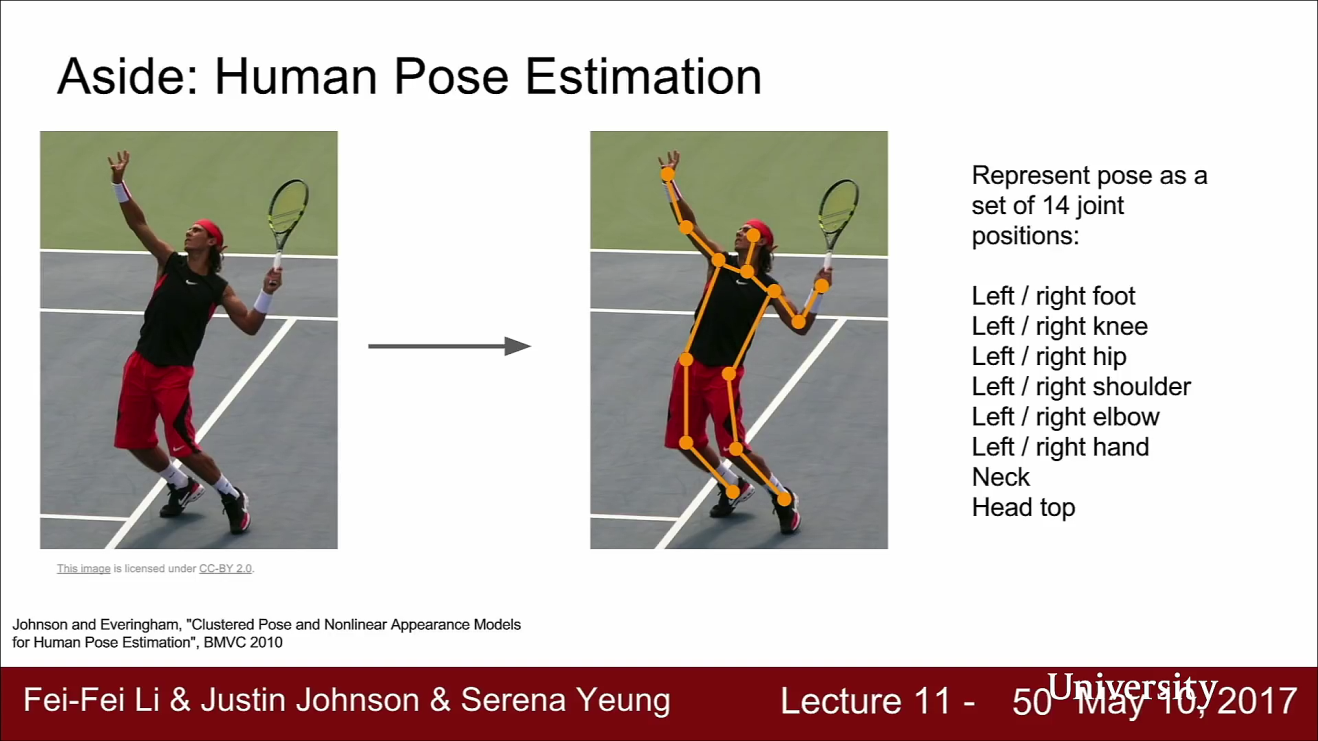
- 그 중 하나는 위의 슬라이드와 같이 human pose estimation 입니다.
- human pose estimation에서는 사람 이미지가 입력으로 들어갑니다. 출력은 이 사람의 각 관절의 위치입니다. 이 네트워크는 사람의 포즈를 예측합니다. 즉, 이 사람의 팔 다리가 어디에 있는지를 예측합니다.
- 보통 이런 문제를 풀 때에는 관절의 갯수를 14개로 간략화 하고 사람의 포즈를 정의합니다.
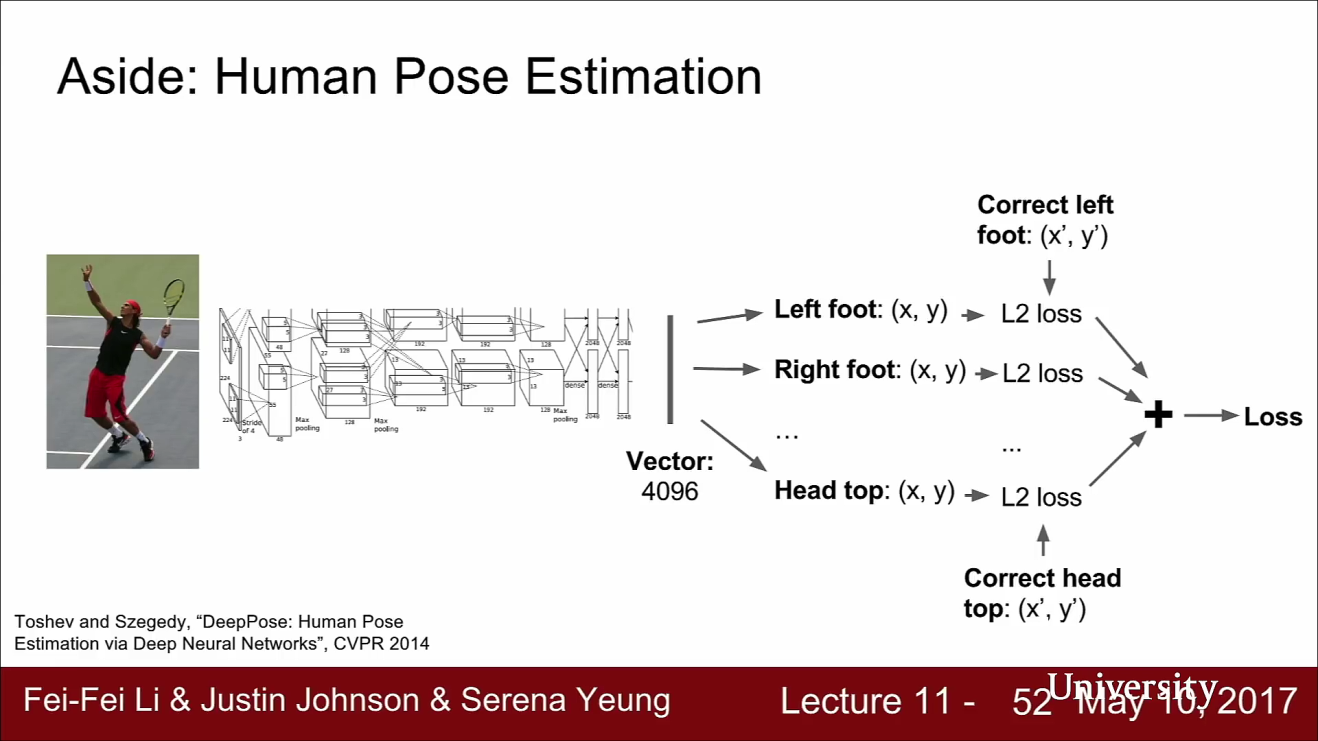
- 그리고 네트워크의 출력은 각 관절에 해당하는 14개의 좌표값입니다.
- 예측된 14개의 점에 대해서 regression으로 loss를 계산하고 backprop으로 학습시킵니다.
- Pose estimation에서는 관절의 갯수와 관절의 순서를 미리 정하고 학습을 시켜야 합니다.
- 이와 유사하게 Regression output이 고정된 갯수라면 Pose estimation과 같은 다양한 문제를 풀 수 있습니다.
Object detection
- 다음으로 다룰 문제는 object detection 입니다. object detection은 computer vision에서 중요한 문제 중 하나입니다.
- object detection은 연구된 역사가 길어서 다룰 수 있는 내용은 상당히 많지만 이번 강의에서는 deep learning과 연관된 object detection의 내용만 살펴볼 예정입니다.
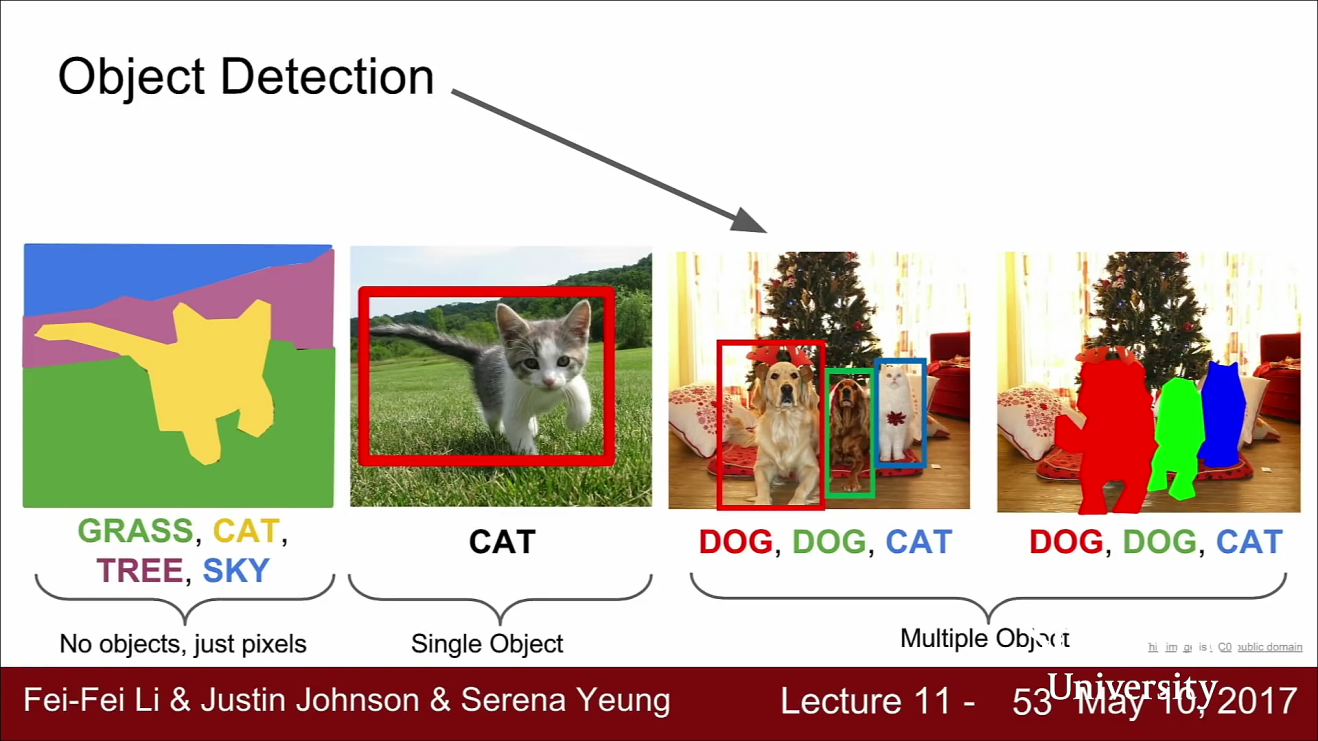
- object detection의 task는 입력 이미지가 주어지면 이미지에 나타나는 객체들의 bounding box와 해당하는 카테고리를 예측합니다. 즉, 앞에서 다룬 classification + localization과는 조금 다릅니다.
- 이렇게 하는 이유는 예측하야 하는 Bbox의 수가 입력 이미지에 따라 달라지기 때문입니다. 각 이미지에 객체가 몇 개나 있을 지는 미지수입니다.
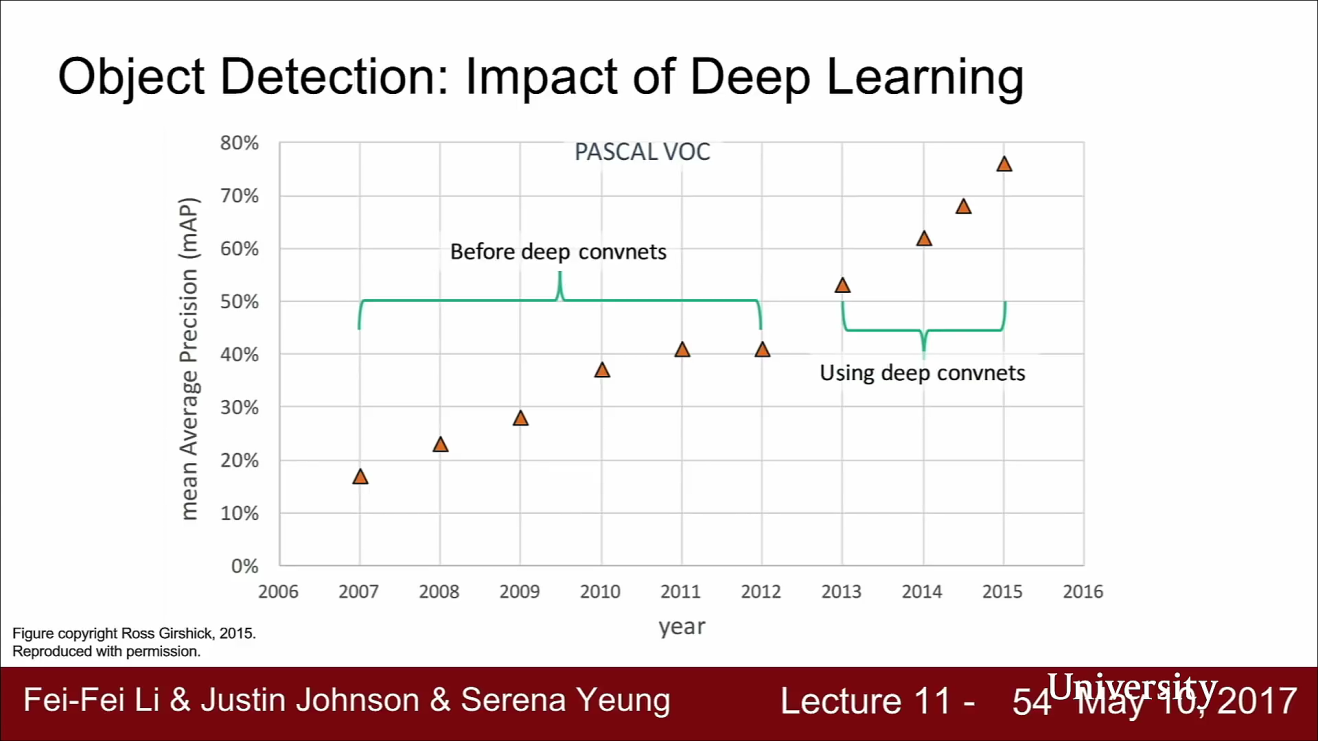
- 위 슬라이드는 PASCAL VOC Dataset을 이용한 모델들의 성능이 발전하는 과정을 보여줍니다. PASCAL VOC는 Detection에서 아주 오래전부터 사용되었습니다.
- 데이터를 보면 Deep learning이 도입된 이후 부터 성능이 아주 좋아진 것을 볼 수 있습니다.
- 그리고 2015년 이후의 데이터는 없는데요, 그 이유는 이미 성능이 너무 좋아져서 State of the art에 대한 논의가 무의미해 졌기 때문입니다.
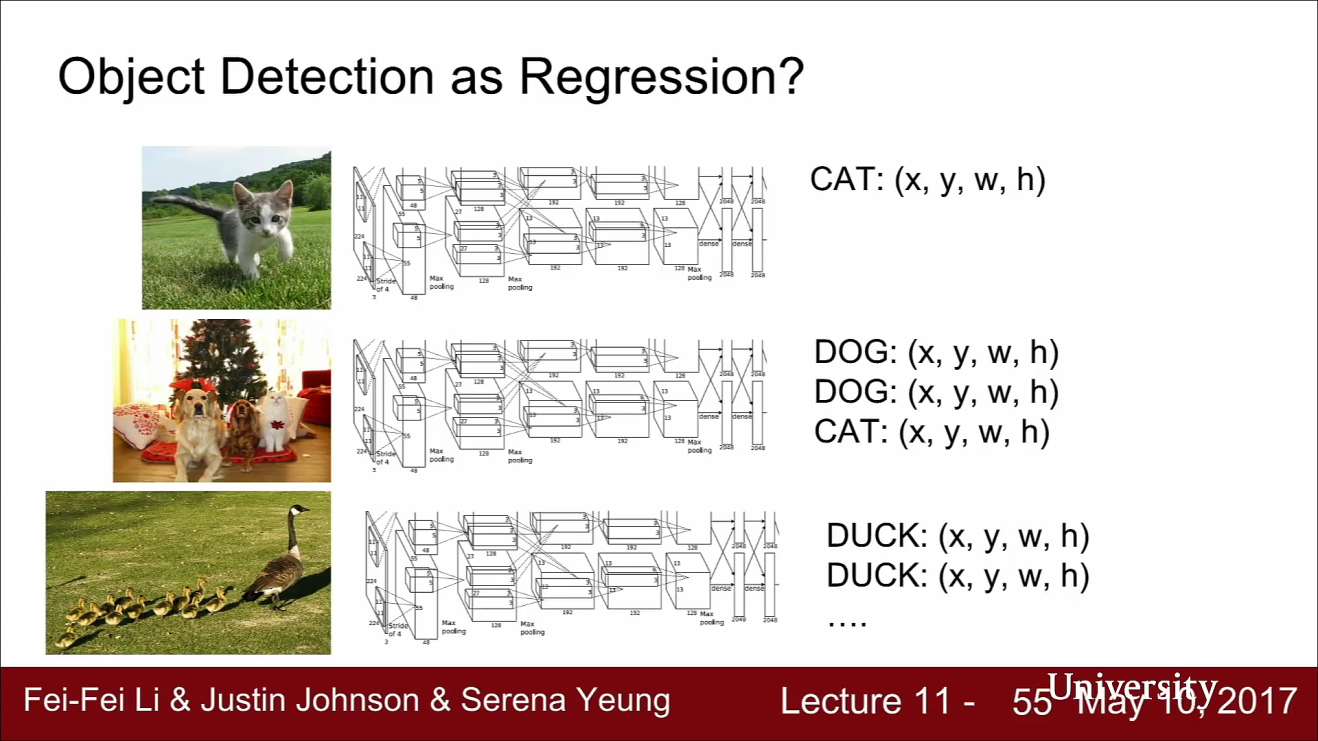
- 위 슬라이드를 보면 첫 번째 사진에는 고양이 한마리에 대한 Bbox의 정보가 있어야 하고 두 번째 사진은 개 2마리, 고양이 1마리에 대한 Bbox 정보가 있어야 합니다.
- 마지막 사진에는 오리 여러 마리에 대한 Bbox가 있어야 합니다.
- 따라서 object detection을 하기 위해서는 새로운 아이디어가 필요합니다. 먼저 가장 간단한 sliding window 아이디어 부터 알아보겠습니다.
- 앞선 semantic segmentation에서 작은 영역으로 쪼갰던 아이디어와 비슷한 방법을 사용합니다.
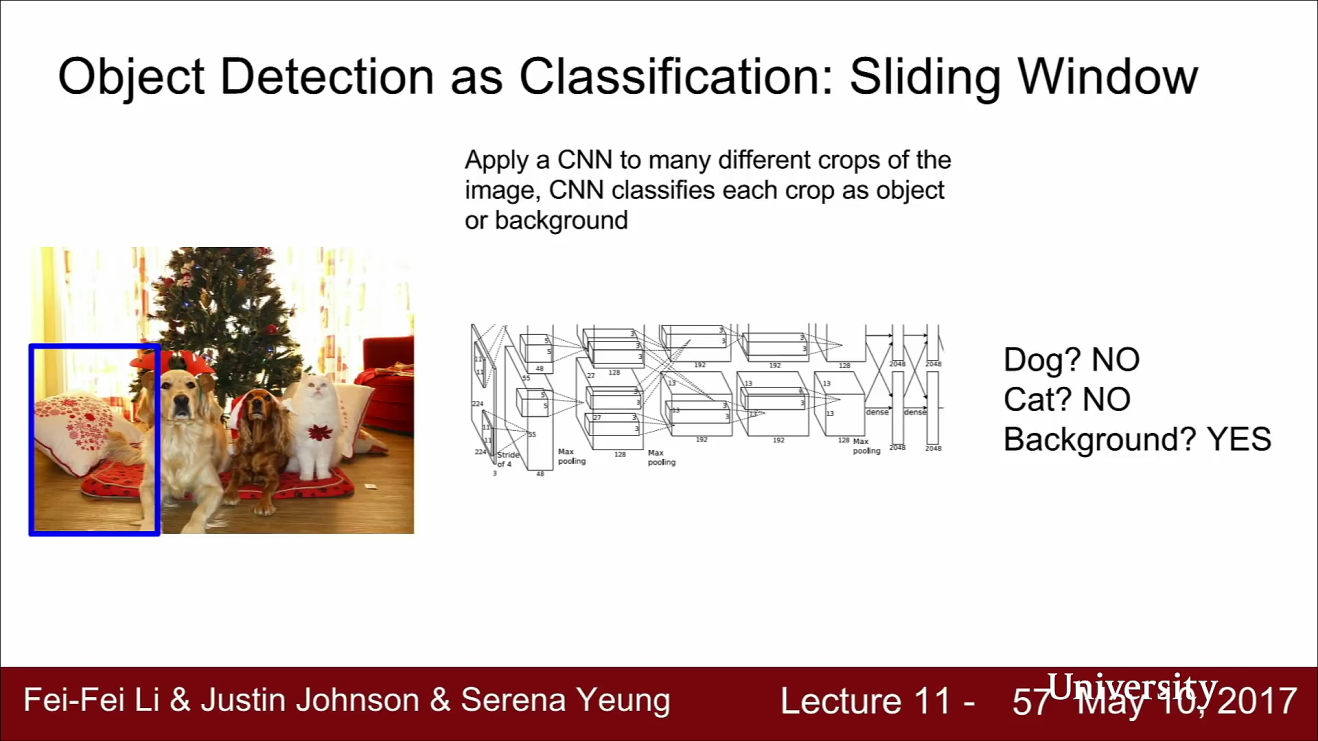
- Sliding Window를 이용하려면 입력 이미지로부터 다양한 영역을 나눠서 전처리 합니다.
- CNN은 이 작은 영역에 대하여 classification을 수행합니다. 이 때 위 파란색 박스 영역에는 어떤 object도 없고 background 카테고리임을 인식할 것입니다.
- 즉 object가 없는 경우를 대비하여 background 카테고리를 입력해 주어야 합니다.
- 네트워크가 배경이라고 예측했다면, 이 곳은 어떤 카테고리에도 속하지 않는다는 것을 의미합니다.
- 이미지의 왼쪽 밑 영역에는 아무것도 없으므로 네트워크는 배경이라고 예측할 것이므로 아무것도 없다는 뜻입니다.
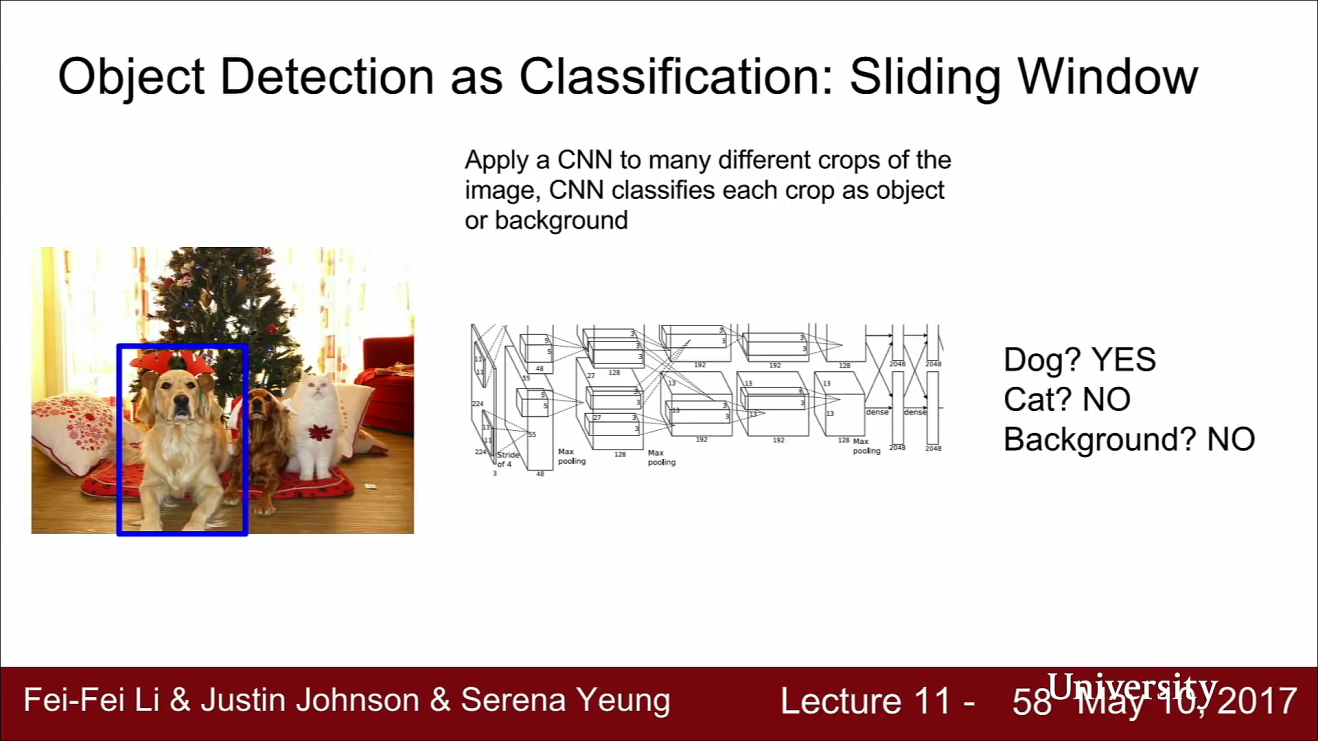
- 다른 영역을 추출해 보겠습니다. 여기에는 개는 있고, 고양이는 없고, 배경은 아닌 상태입니다.
- 이렇게 sliding window를 통하여 문제를 해결할 수 있지만, 이 방법에는 몇가지 문제가 있습니다.
- 먼저 어떻게 영역을 추출할 지가 문제가 될 수 있습니다.
- 이미지 안에서 어떤 크기의 object가 어디에 위치가 될 지 모르니 window의 사이즈 자체를 설정하는 것에 문제가 있습니다.
- 따라서 이런 brute force 방식의 sliding window를 하려면 너무나 많은 경우의 수가 존재합니다.
- 또한 계산량의 문제가 있습니다.
- 작은 영역 하나 하나마다 거대한 CNN을 통과시키려면 이 때의 계산량은 다를 수 없는 양입니다.
- 따라서 Object detection문제를 풀기 위하여 brute force sliding window를 하는 일은 절대 없습니다.
- 대신에 Regional Proposals 라는 방법이 있습니다. 이 방법은 Deep learning을 사용하는 방법은 아닙니다.
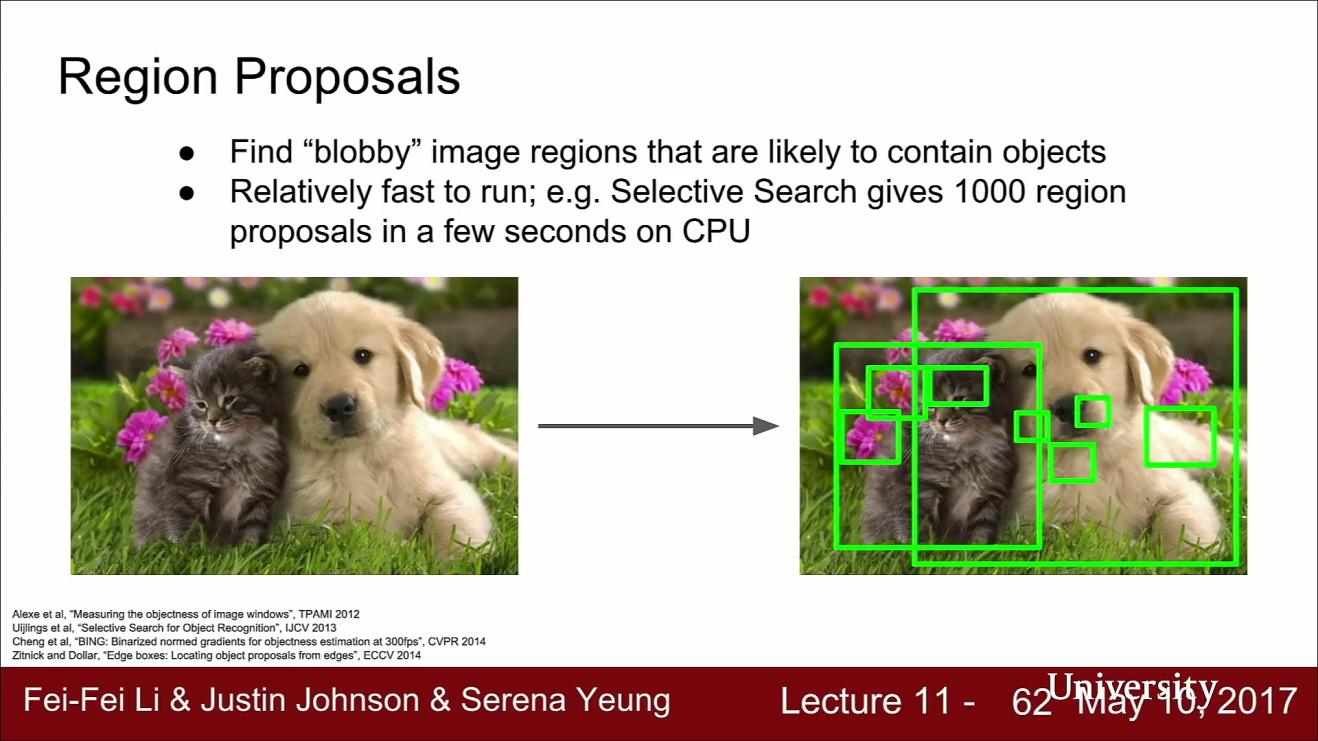
- Regional Proposal Network는 전통적인 신호처리의 기법을 사용합니다. Regional Proposal Network는 Object가 있을 법한 Bbox를 제공해 줍니다. 예를 들어 1000 ~ 2000 개 정도의 region을 제공해 준다고 가정해 봅시다.
- 이미지 내에서 객체가 있을 법한 후보 region proposal을 찾아내는 다양한 방법이 있습니다. 예를 들어 Regional Proposal Network는 이미지 내의 뭉텅이가 진 곳(blobby)한 곳을 찾아냅니다.
- 이 지역들은 객체가 있을지도 모르는 후보 영역들입니다. 이런 알고리즘은 비교적 빨리 작동합니다.
- Region Proposal의 방법 중 유명한 알고리즘에는
Selective Search가 있습니다. - 이 방법은 노이즈가 심하여 대부분은 실제 객체가 아니지만 Recall은 아주 높습니다. 따라서 이미지내에 객체가 존재한다면 Selective Search의 Region Proposal 안에 속할 가능성이 높습니다.
- 따라서 Sliding window와 같이 굉장히 비효율적인 방법보다 Selective Search를 이용하여 가능성 있는 부분을 선택한 다음에 CNN의 입력으로 이용하면 좀 더 효율적입니다.
R-CNN
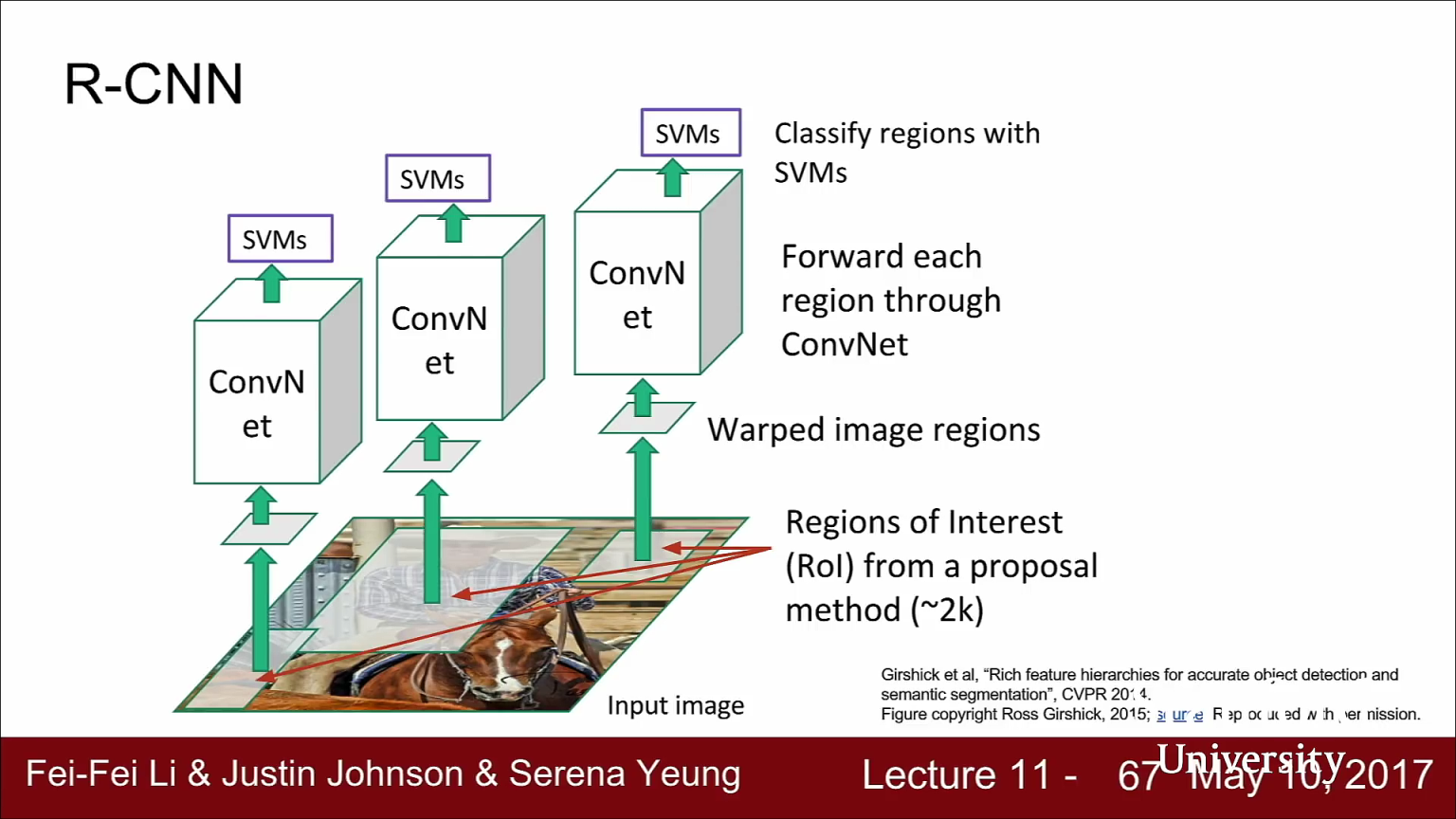
- 위에서 소개한 Selective Search의 개념이 R-CNN에서 소개됩니다. 위 그림의 과정이
R-CNN의 전체 과정입니다.
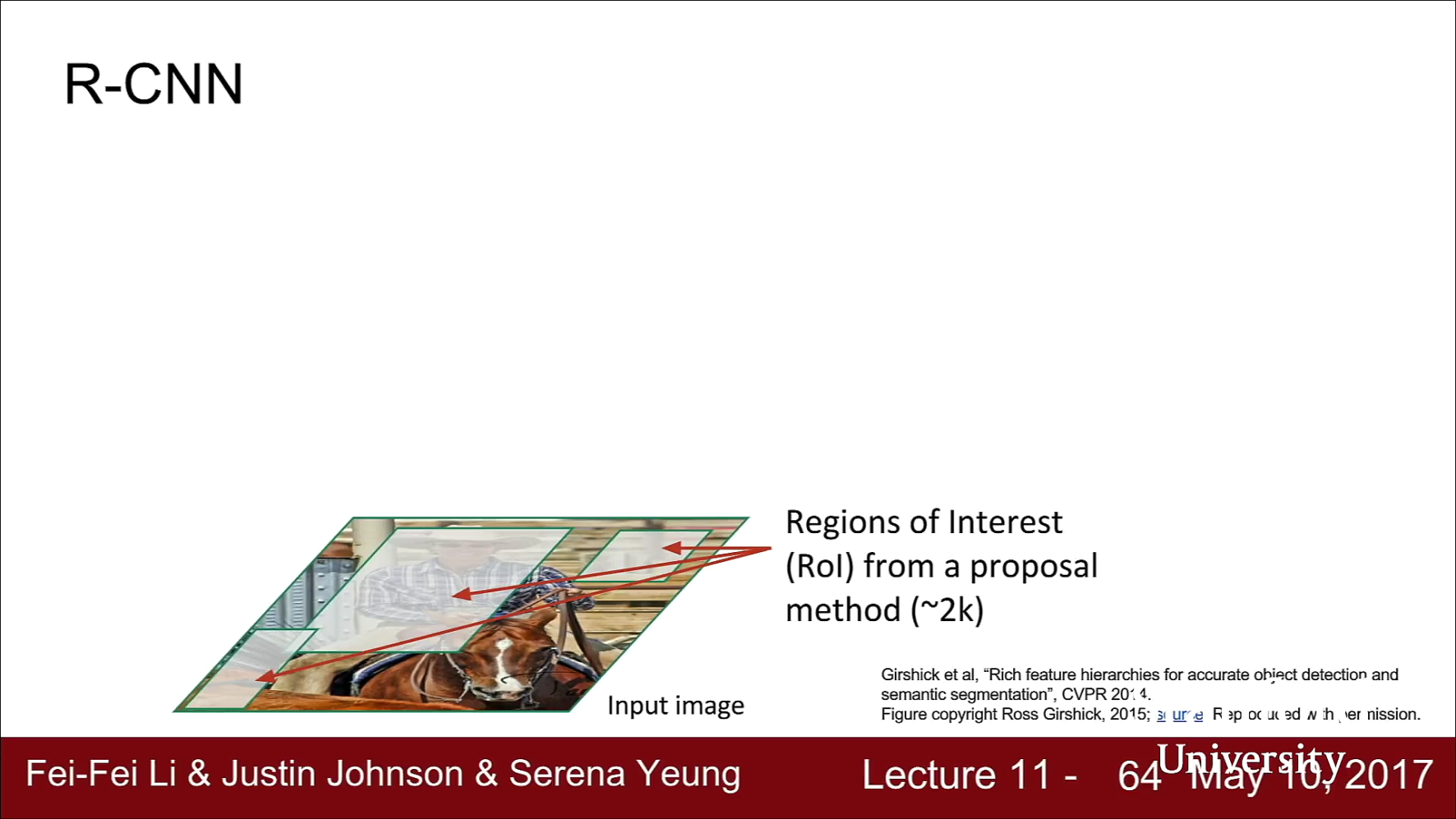
- 먼저 이미지가 주어지면 Region Proposals을 얻기 위해 Region Proposal Network를 수행합니다.
- Region Proposal은 Region of Interest(ROI)라고도 합니다. Selective Search를 통하여 2000여개의 ROI를 얻어냅니다. 위 그림의 회색 영역을 Selective Search를 통하여
- 하지만 여기에서는 각 ROI의 사이즈가 각양각색이라는 문제가 생길 수 있습니다.
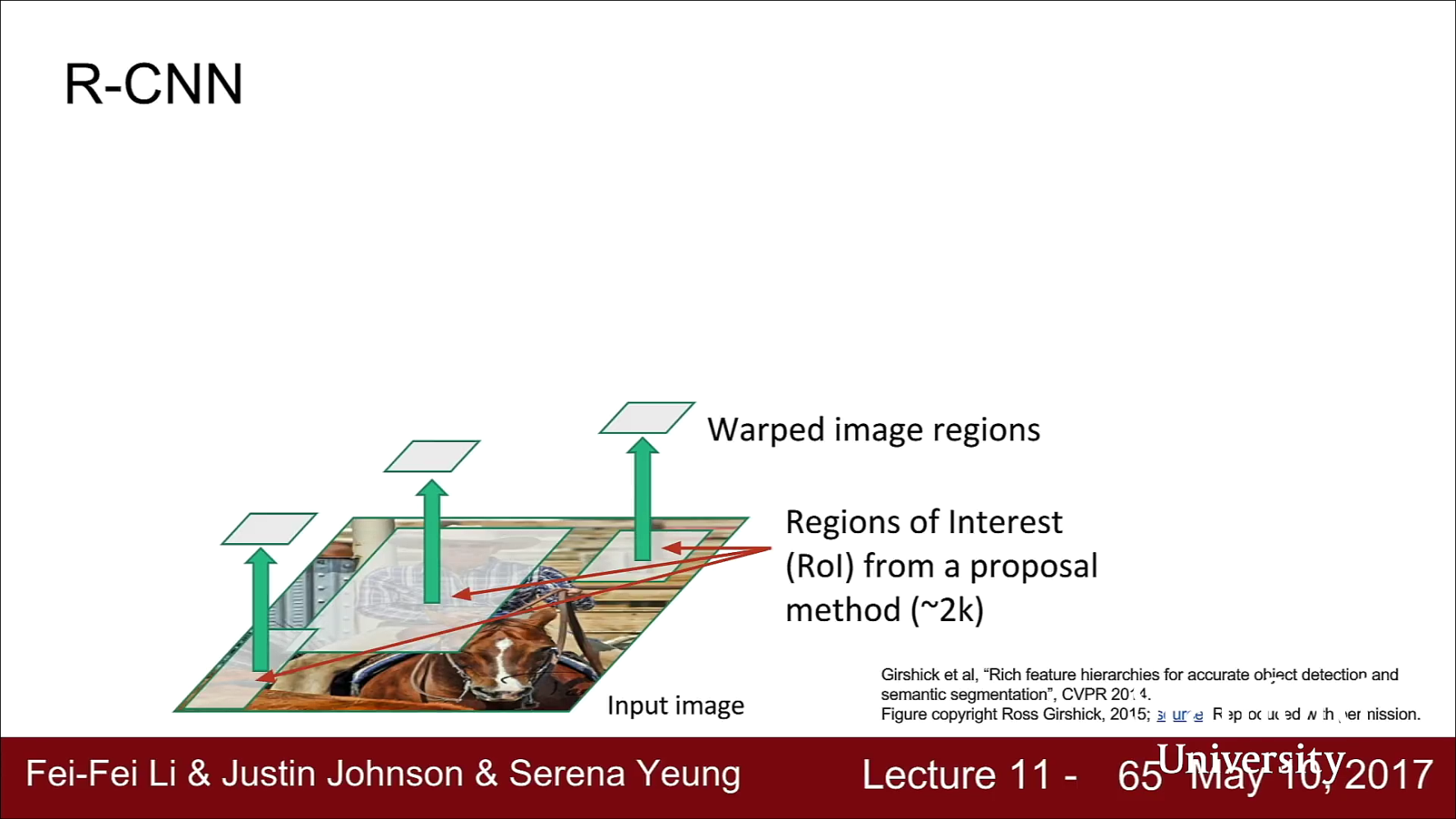
- 추출된 ROI로 CNN classification을 수행하려면 FC layer 등으로 같은 입력사이즈로 맞추어 줘야 하기 때문에 ROI의 크기가 같아야 합니다.
- 따라서 Region Proposal을 추출하면 CNN의 입력으로 사용하기 위하여 동일한 고정된 크기로 변형해야 합니다. 즉, Regional Propose를 추출하면 고정된 사이즈로 크기를 바꿉니다. 위 그림의 warped image region이 이 부분에 해당합니다.
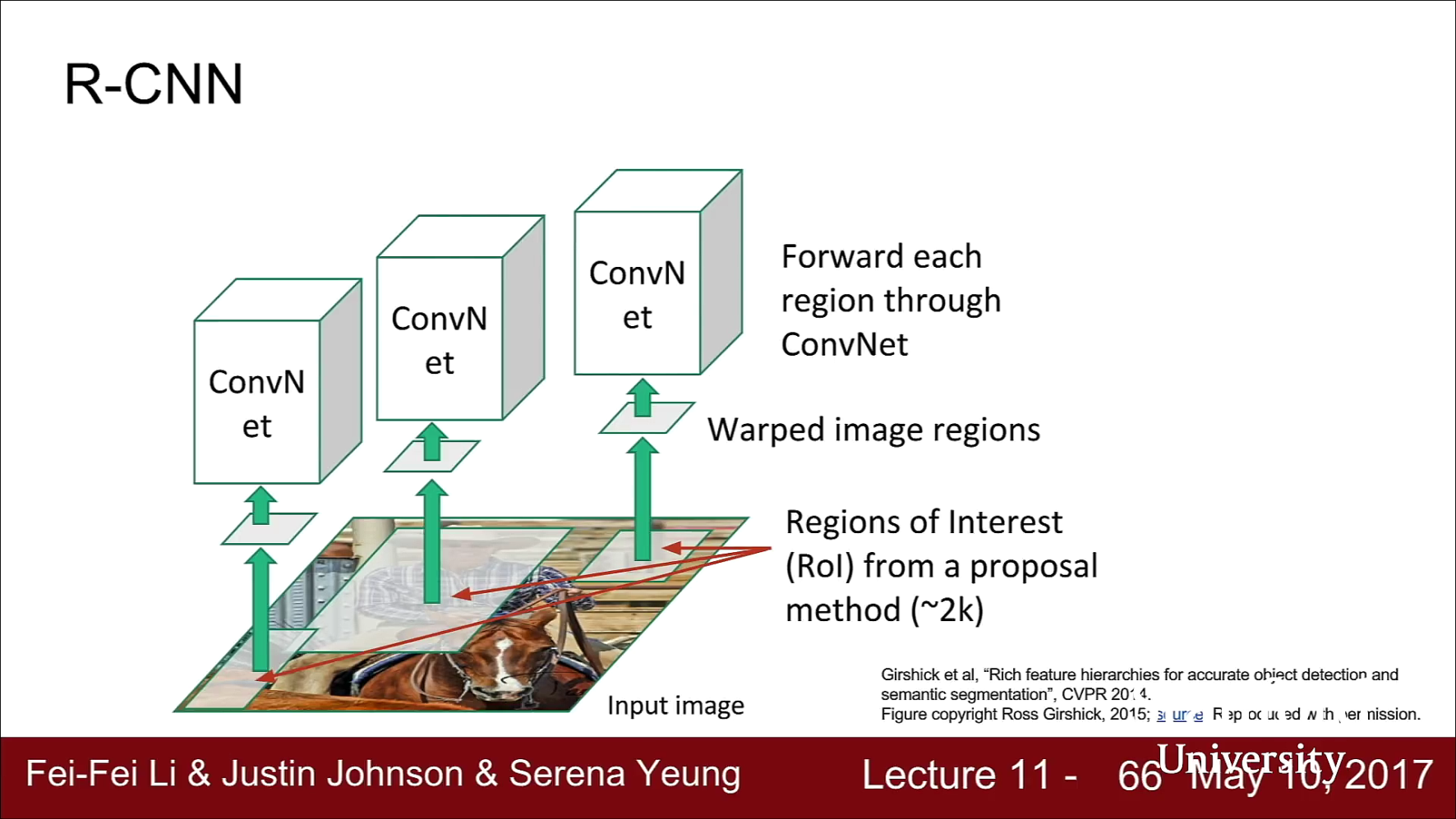
- 추출된 ROI의 크기를 고정된 사이즈로 바꾼 뒤 그 영역을 CNN에 통과시킵니다.
- 마지막으로 R-CNN의 경우에는 ROI들의 최종 classification에는
SVM을 사용하였습니다. - 여기 슬라이드에는 빠져있지만 R-CNN은 Region Proposal을 보정하기 위한 regression 과정도 거칩니다. Selective Search의 Region Proposal이 대게는 정확하지만 그렇지 못한 경우도 있기 때문입니다.
- RCNN은 BBox의 카테고리도 예측하지만 BBox를 보정해 줄 수 있는 offset값 4개도 예측합니다. 이를 Multi-task loss로 두고 한번에 학습합니다.
- 예를 들어 Region Proposal이 사람을 잡았는데 머리를 빼먹었다고 가정하면, 네트워크는 이 object가 사람인 것을 알고 사람은 머리가 있어야 함을 예측하여 offset은 Bbox를 조금 더 위로 올립니다.
- RCNN은 정리하자면 Region Proposal(Selective Search)라는 전통적인 방식을 사용합니다. 즉, RCNN에서는 Region Proposal을 하기 위하여 학습을 하지 않습니다.
- RCNN을 사용하려면 어떻게 학습 데이터를 마련해야 할까요? RCNN은 Fully Supervised 입니다. 따라서 학습 데이터에 대하여 이미지 내의 모든 객체에 대한 BBox가 있어야 합니다. 즉, 이미지에 대하여 BBox와 그 BBox의 class가 주어져야 합니다.
- 자세한 내용은 R-CNN 논문을 참조하시기 바랍니다.
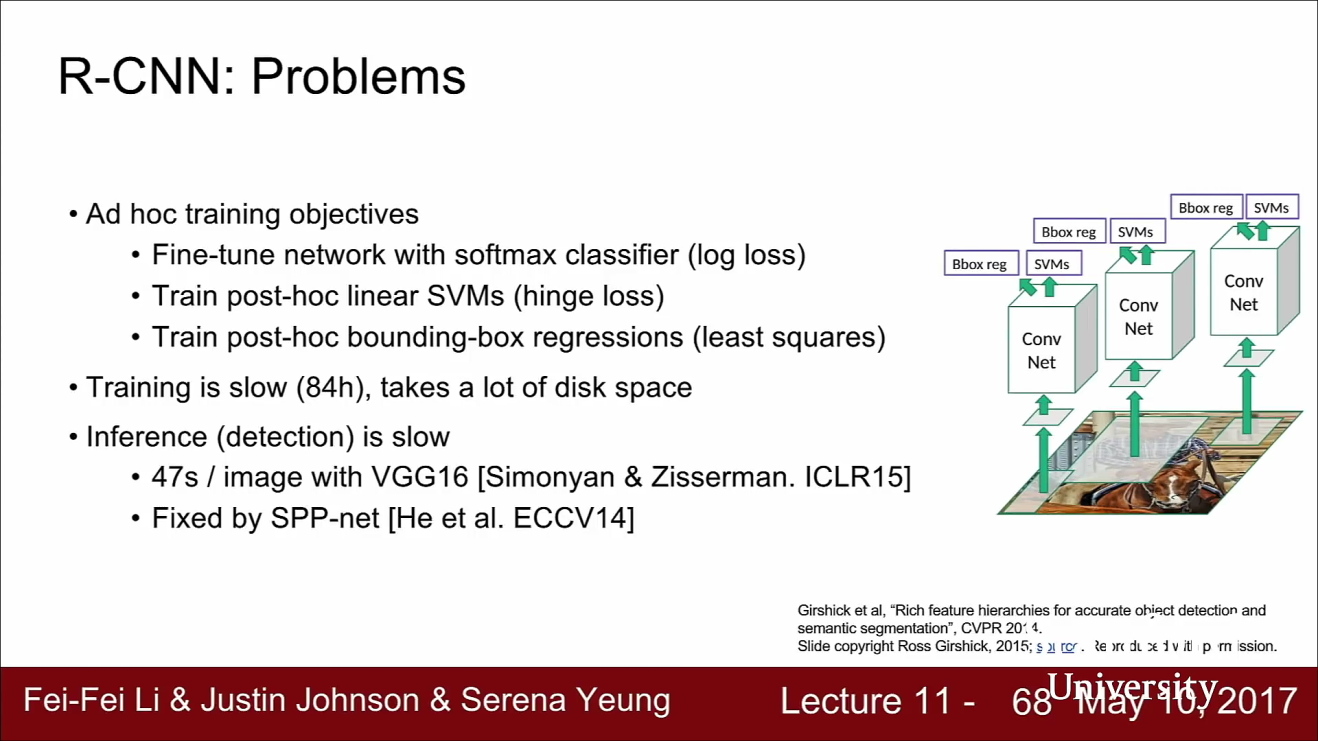
- RCNN에 대하여 살펴보면 알 수 있겠지만 RCNN에는 문제점 들이 있습니다. RCNN은 여전히 계산 비용이 큽니다.
- RCNN은 2000개의 Region Proposal이 있고 각각이 독립적으로 CNN의 입력으로 들어갑니다. 너무 많은 양입니다.
- RCNN의 구현을 살펴보면 CNN에서 나온 Feature를 디스크에 덤핑 하는데 이 용량 또한 어마어마 합니다.
- 그리고 RCNN은 학습과정 자체가 상당히 오래 걸립니다. 이미지당 2000개의 ROI를 Forward/Backward pass를 수행해야 합니다. 논문에는 81시간 정도 학습이 되어있다고 합니다.
- Test time도 아주 느립니다. 이미지 한 장당 대략 30초가 걸립니다. 각 Region proposal 마다 CNN을 수행해야 하므로 수천 번의 forward pass가 요구됩니다. 아주 느린 과정입니다.
R-CNN은 결론적으로 모든 과정이 비효율적입니다. 학습, 추론 과정이 느리고 학습에 필요한 메모리량도 많이 필요하여 비효율적인 문제가 있습니다.
Fast R-CNN
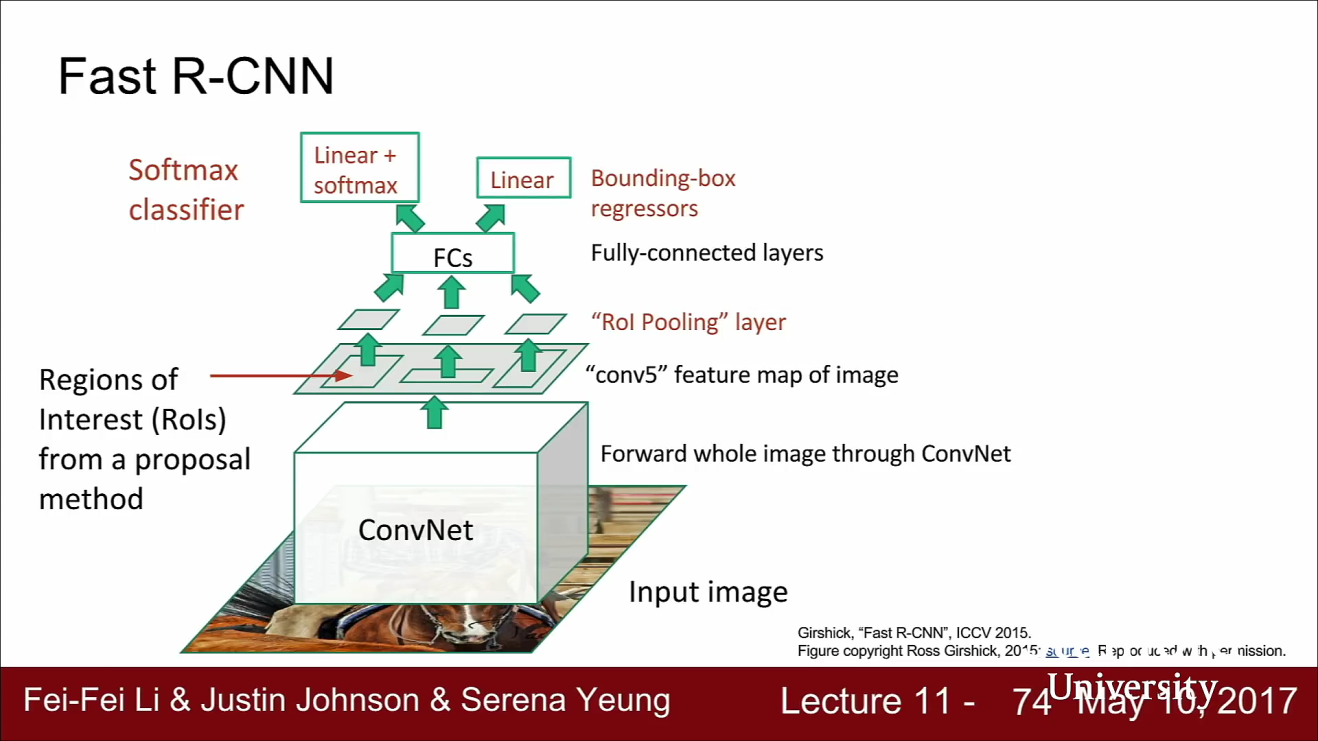
- Fast RCNN은 RCNN의 계산 비용 문제를 다소 해결하였습니다.
- Fast RCNN도 RCNN과 시작은 같습니다. 하지만 Fast RCNN에서는 각 ROI마다 각각 CNN을 수행하지는 않습니다. 대신 전체 이미지에 CNN을 수행합니다.
- 그 결과 전체 이미지에 대한 고해상도 Feature Map을 얻을 수 있습니다.
- Fast RCNN에서도 여전히 Selective Search 같은 방법으로 Region proposal을 계산합니다.
- 하지만 여기서는 ROI를 각각을 가져오지는 않습니다.
- CNN Feature map에 ROI를 Projection 시키고 전체 이미지가 아닌 Feature map에서 가져옵니다.
- 이제는 CNN의 Feature를 여러 ROI가 서로 공유할 수 있습니다.
- 그 다음 FC layer가 있습니다. FC layer는 고정된 크기의 입력을 받습니다. 따라서 CNN의 Feature map에서 가져온 ROI는 FC layer의 입력에 맞게 크기를 조정해 줘야 합니다.
- 학습이 가능하도록 미분가능한 방법을 사용해야 합니다. 이 방법이 ROI Pooling layer 입니다.
- Feature map에서 가져온 ROI의 크기를 조정하고 나면 FC layer의 입력으로 넣어서 Classification Score와 Linear Regression offset을 계산할 수 있습니다.
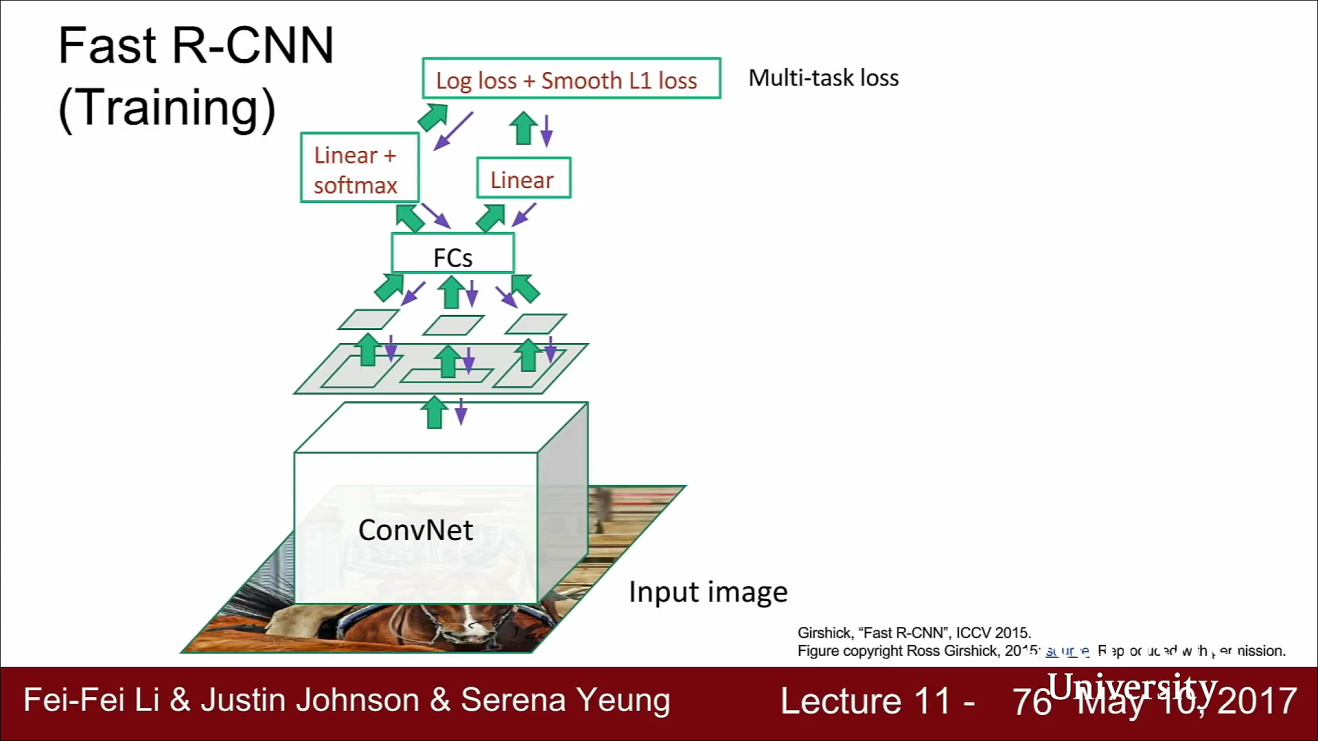
- Fass RCNN을 학습할 때에는 두 Loss를 합쳐서 Multi-task Loss로 Backprop을 진행합니다.
- 이 방법을 통하여 전체 네트워크를 합쳐서(jointly) 동시에 학습시킬 수 있습니다.
- 위 방법은 ROI Pooling에 대한 방법입니다. 이 방법은 이번 코스에서 다루진 않겠습니다. 내용은 논문을 참조하시기 바랍니다.
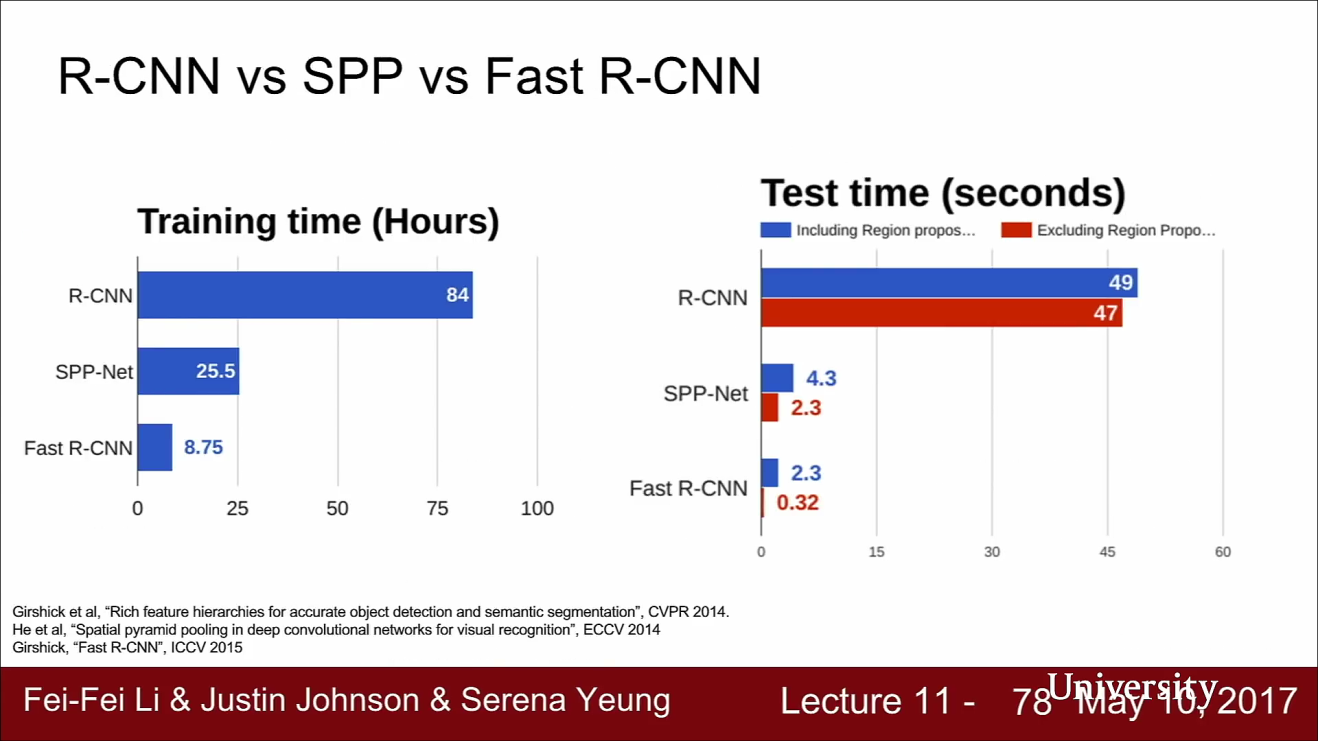
- RCNN과 Fast RCNN에 대하여 비교해 보면 위 슬라이드의 결과와 같습니다.(비교를 위해 SPPNet이란 것도 포함시켰습니다.)
- Train time을 살펴보면 Fast RCNN이 RCNN보다 10배 정도 빠릅니다.
- Faster RCNN의 속도가 더 빠른 이유는 Feature map을 공유하고 있기 때문입니다.
- Test time을 살펴보아도 Fast RCNN의 Test time은 정말 빠릅니다.
- Test time을 보면 Regional Proposal 하는 시간이 대부분을 차지하고 있음을 알 수 있습니다.
- Fast RCNN을 보면 Region Proposal을 한 이후 CNN을 거치는 과정에서는 모든 Region Proposal을 공유하기 때문에 1초도 안걸리는 것을 알 수 있습니다.
- 따라서 Fast RCNN에서 Region Proposal은 계산과정 중의 병목임을 알 수 있습니다.
Faster R-CNN
- RCNN의 문제는 엄청난 계산량이 필요하다는 것이었고 Fast RCNN에서는 Feature map을 공유하는 방법을 통하여 계산 속도 문제를 일부 해결하였습니다.
- Fast RCNN에서의 문제점 또한 여전히 계산 속도에 있었고 Fast RCNN의 계산 병목현상인 Regional Proposal 문제를 해결하는 것이 Faster RCNN입니다.
- 지금까지의 문제는 region proposal을 계산하는 과정이 병목이라는 점이었습니다.
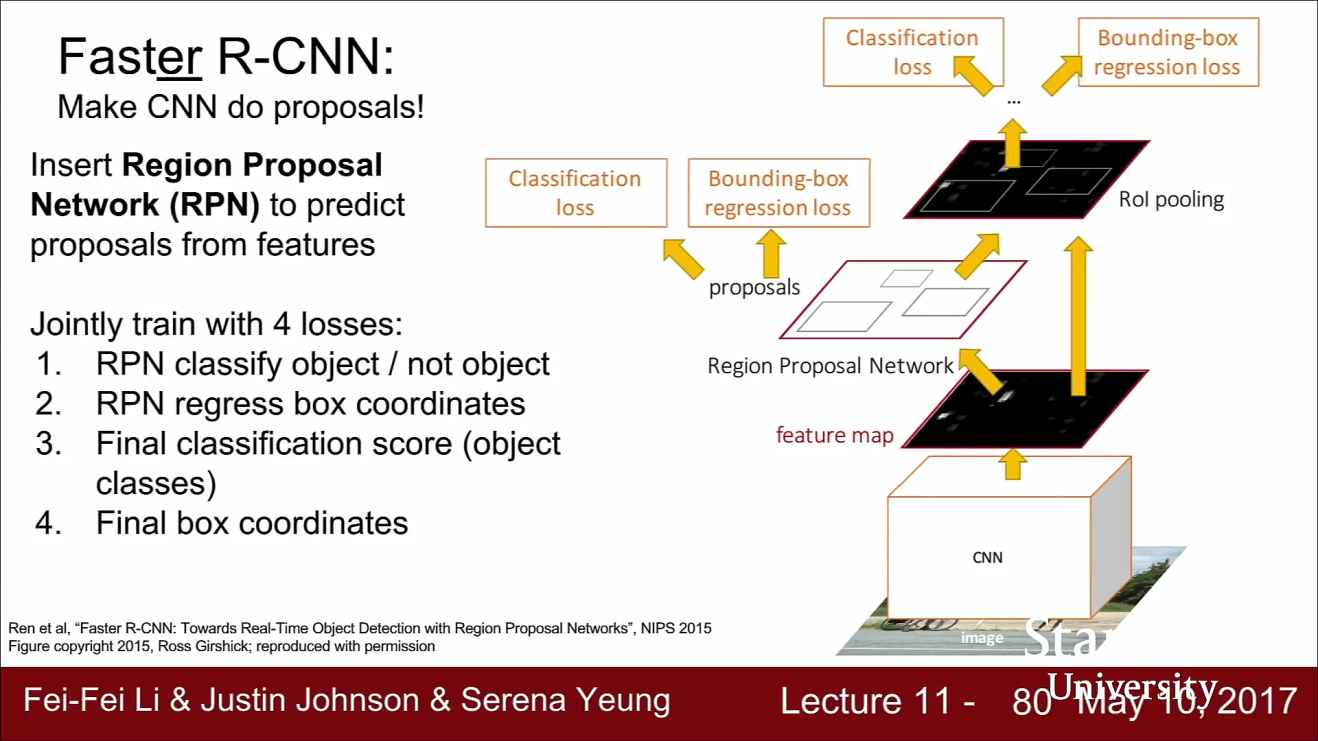
- Faster RCNN에서는 네트워크가 region proposal을 직접 만들 수 있습니다.
- Faster RCNN에서는 입력 이미지가 있고 입력 이미지 전체가 네트워크로 들어가서 Feature map을 만듭니다.
- Faster RCNN은 별도의 (RPN)Region Proposal Network가 있습니다. RPN은 네트워크가 Feature map을 가지고 Region Proposal을 계산하도록 합니다.
- RPN을 거쳐서 Region Proposal을 예측하고 나면 나머지 동작은 Fast RCNN과 동일합니다.
- Feature map에서 Region proposal을 가져오고 이들을 나머지 네트워크에 통과시킵니다.
- 그리고 multi-task loss를 이용해서 여러가지 Loss를 한번에 계산합니다. Faster RCNN은 4개의 Loss를 한 번에 학습합니다.
- RPN에는 2가지 Loss가 있습니다.
- 먼저 한가지는 이곳에 객체가 있는지 없는지를 예측합니다.
- 나머지 Loss는 예측한 Bbox에 관한 것입니다.
- Faster RCNN에서는 최종단에서도 두 개의 Loss가 있습니다.
- 하나는 Region Proposal의 Classification을 결정합니다.
- 나머지는 Bbox Regression 입니다. 앞서 만든 Regression Proposal을 보정해 주는 역할을 합니다.