KITTI 데이터셋
2018, Dec 31
- 참조 : https://github.com/lkk688/3DDepth
- 이번 글에서는 컴퓨터 비전 Task로 많이 사용되는 KITTI 데이터셋에 대한 내용을 다루도록 하겠습니다.
Kitti data format
- KITTI 데이터 센서셋 구성 : http://www.cvlibs.net/datasets/kitti/setup.php
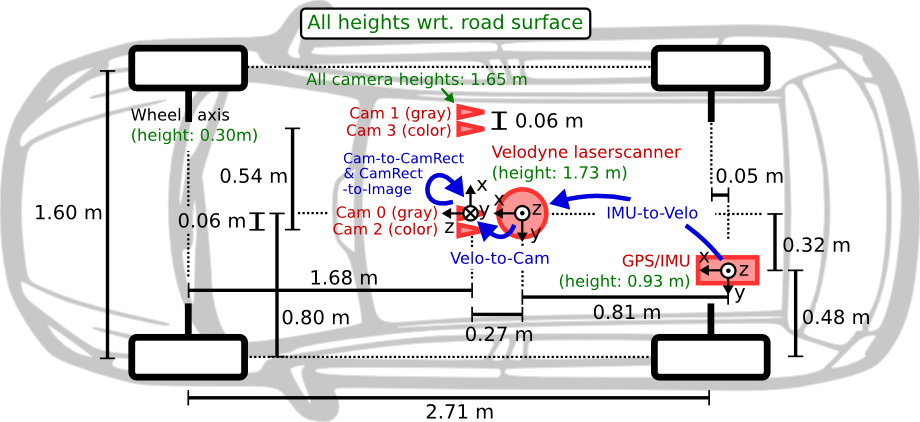
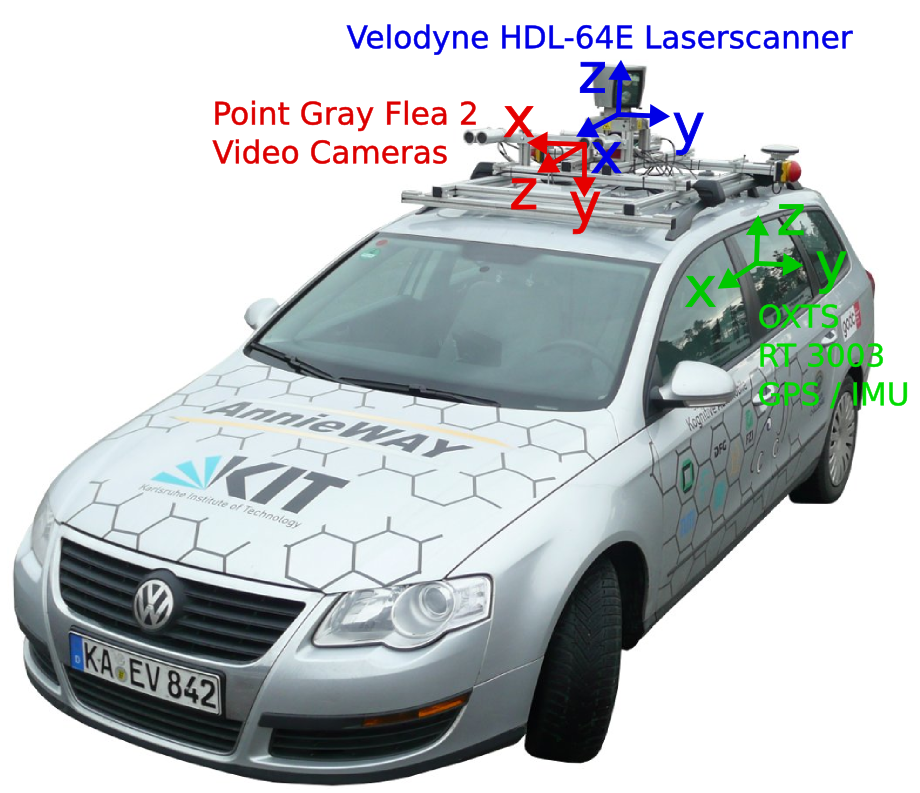
- KITTI 데이터셋를 취득하기 위한 차량의 셋업은 아래와 같습니다.

- 위 그림 중 유심히 볼 부분은 라이다와 카메라의 좌표축입니다. 라이다는 오른손 좌표계를 기준으로 엄지손가락이 Z축, 검지 손가락이 X축, 중지 손가락이 Y축에 해당합니다.
- 반면 카메라 좌표계에서는 이미지 좌표계와 동일한 방향으로 X, Y 축을 가지고 깊이 방향으로 Z 축을 가집니다.
- 따라서 위 그림과 같은 좌표축을 가지게 됨을 알 수 있습니다.
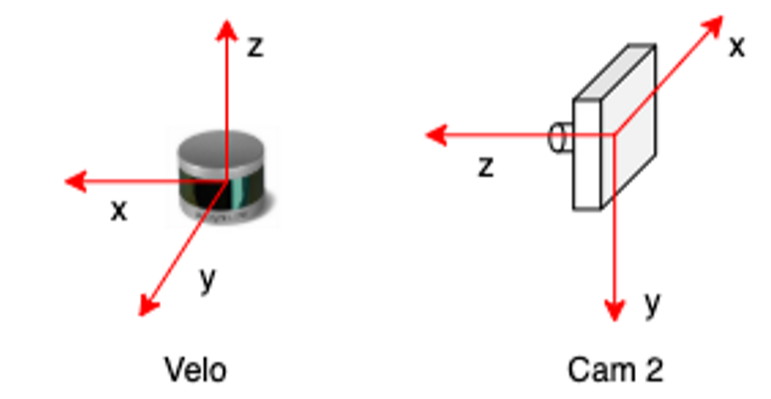
- 라이다와 카메라만 따로 떼어서 보면 위 그림과 같습니다.
- KITTI 데이터셋의 폴더 구조는 다음과 같습니다.
- {training,testing}/image_2/id.png
- {training,testing}/image_3/id.png
- {training,testing}/label_2/id.txt
- {training,testing}/velodyne/id.bin
- {training,testing}/calib/id.txt
- 센서의 좌표축을 정리하면 다음과 같습니다.
Camera: x = right, y = down, z = forwardVelodyne: x = forward, y = left, z = upGPS/IMU: x = forward, y = left, z = up
- 카메라는 접지면과 거의 수평으로 장착됩니다. 카메라 이미지는
1382 x 512픽셀 크기로 잘립니다. 보정 (rectification) 후 이미지가 약간 작아집니다. 카메라는 라디아의 레이저 스캐너가 앞을 향할 때초당 10 프레임으로 트리거됩니다.