depthmap 시각화 방법
2020, Sep 07
- 이번 글에서는 이미지의 각 픽셀 별 (또는 일부 픽셀) 소수 단위 (ex. 10.34 m)의 깊이 정보를 나타내는 방법과 컬러로 시각화 하는 방법에 대하여 간단하게 살펴보도록 하겠습니다.
목차
정수 형태로 depthmap 저장하는 방법
- 3D 공간에서의 거리 정보를 2D 이미지에 사영하였을 때, 이미지의 각 픽셀 별 값은 깊이 방향의 값을 저장하게 되고 이 데이터를
depthmap이라고 부릅니다. depthmap을 이미지 형태로 저장하여 관리하는데 깊이 값은 소수를 포함한 값이므로 소수값을 그대로 이미지 형태로 저장할 수 없습니다. 따라서 소수값을 정수로 변환한 다음 정수값을 이용하여 이미지로 저장해야 합니다.- 일반적으로 사용하는
uint8을 이용하면 0 ~ 255 범위를 표현할 수 있기 때문에 소수값의 대부분의 정보를 잃어버립니다. 따라서uint16을 이용하여 0 ~ 65,535의 범위를 이용하면 다양한 소수값도 표현할 수 있습니다. - 표현하고 싶은 깊이 정보의 범위가 0 ~ 100 m 라고 가정하겠습니다. 그러면 0 m는 0의 값에 대응되고 100m는 65,535 값에 대응되도록 하면 됩니다. 따라서
int(depth/max_range * 65535)를 이용하여 모든 깊이 값을 표현하면 됩니다. - 예를 들어 90.256 m 를 표현하고 싶으면
int(90.256 / 100 * 65535) = 59149로 픽셀의 값을 저장하면 됩니다. 저장할 때에는img.astype(np.uint16)형태로 타입을uint16으로 바꾸어서cv2.imwrite("파일명", img)로 저장하면uint16으로 저장됩니다. - 저장된
depthmap을 읽을 때에는cv2.imread("파일명", cv2.IMREAD_UNCHANGED)와 같은 방식으로 원본을 그대로 읽어오도록 하면uint16타입으로 읽어와집니다. - 이 때 픽셀을
depth * max_range / 65535를 이용하면 원래 깊이 값을 복원할 수 있습니다. 예를 들어 위 예제의 59149 값과 max_range=100을 이용하면59149 * 100 / 65535 = 90.255588...가 됩니다.
- 위 과정을 정리하면 다음과 같습니다.
- ① depthmap의 float 타입의 깊이(depth) 값을
int(depth/max_range * 65535)형태의uint16값으로 변환합니다. - ② depthmap의 타입을 다음과 같이
uint16으로 변환합니다.img = img.asypte(np.uint16)
- ③ depthmap을 다음과 같이 저장합니다.
cv2.imwrite("파일명", img)
- ④ 실제 사용할 때에는 다음과 같이 불러옵니다.
img = cv2.imread("파일명", cv2.IMREAD_UNCHANGED)
- ⑤ 깊이 값을 복원할 때에는 저장할 때 사용한 방식을 역산하여 다음과 같이 사용합니다.
depth * max_range / 65535
- ①, ⑤에 사용한 깊이의 표현 방법은 단순히
depth * 255와 같은 형태로 사용하기도 합니다. (NYU v2 데이터에서도 사용)
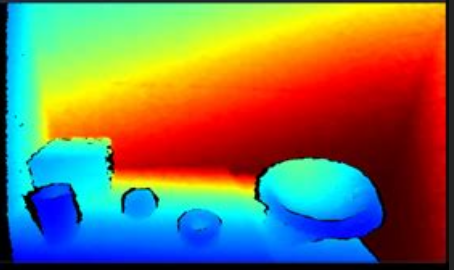
컬러 형태로 depthmap 시각화 하는 방법
dense depthmap(모든 픽셀에 depth가 있음) 또는sparse depthmap(일부 픽셀에 depth가 있음)은grayscale형태로 되어 있어 시각화 하였을 때, 음영의 차이가 있어서 시각적으로 확인은 가능하지만 색상으로 확인할 때 보다는 뚜렷하지 않습니다.- 따라서
depthmap을 컬러 형태로 변환하는 방법에 대하여 살펴보겠습니다. - 샘플 데이터 : https://drive.google.com/file/d/1d3AsyUkunvC5zOpwBAG4caSoidjvNgUx/view?usp=share_link
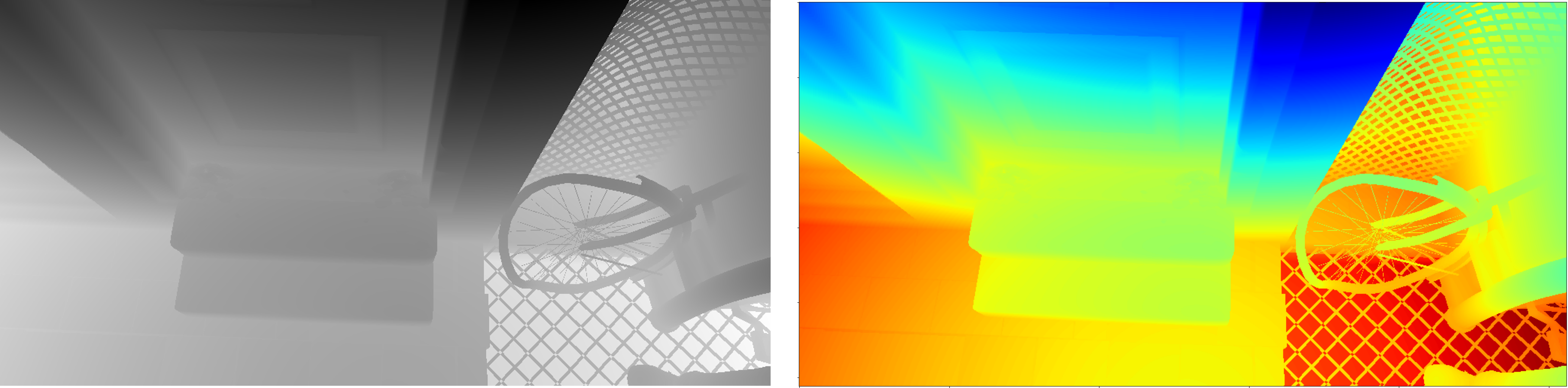
- 샘플 데이터로 아래 코드를 따라하면 다음과 같은 결과를 얻을 수 있습니다. 왼쪽은 원본이고 오른쪽은 컬러로 시각화한 결과입니다.
import cv2
import matplotlib.pyplot as plt
import numpy as np
depthmap_path = "../path/to/depthmap.png"
max_range = 255
depthmap = cv2.imread(depthmap_path, cv2.IMREAD_UNCHANGED)
# 실제 depthmap이 저장된 방식에 맞게 depth 복원하여 사용하면 됩니다.
# depthmap = depthmap.astype(np.float32) / 255.0
# depthmap = depthmap.astype(np.float32) * max_range / 65535
def get_color_depthmap(depthmap, max_range):
# 256 단계의 color map을 생성합니다.
cmap = plt.cm.get_cmap("jet", 256)
cmap = np.array([cmap(i) for i in range(256)])[:, :3] * 255
# sparse depthmap인 경우 depth가 있는 곳만 추출합니다.
depth_pixel_v_s, depth_pixel_u_s = np.where(depthmap > 0)
H, W = depthmap.shape
color_depthmap = np.zeros((H, W, 3)).astype(np.uint8)
for depth_pixel_v, depth_pixel_u in zip(depth_pixel_v_s, depth_pixel_u_s):
depth = depthmap[depth_pixel_v, depth_pixel_u]
color_index = int(255 * min(depth, max_range) / max_range)
color = cmap[color_index, :]
cv2.circle(color_depthmap, (depth_pixel_u, depth_pixel_v), 1, color=tuple(color), thickness=-1)
return color_depthmap
plt.imshow(color_depthmap)
plt.show()