Monocular 3D Object Detection 에서의 Orientation Estimation (방향 추정)
2021, Aug 10
- 참조 : https://towardsdatascience.com/orientation-estimation-in-monocular-3d-object-detection-f850ace91411
- 이번 글에서는 단안 카메라에서의 3D Object Detection에서의 방향 추정을 하는 방법에 대하여 알아보도록 하겠습니다.
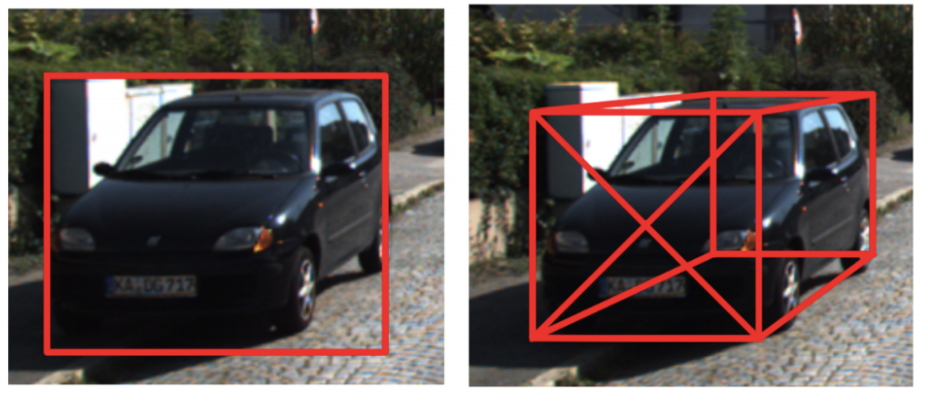
- Monocular 3D Object Detection은 2D RGB 이미지에서 객체 주변에 3D 방향의 Bounding Box를 그리는 Task를 의미합니다.
- 단일 2D 이미지 입력으로 3D를 추론하는 작업은 어려우며 차량 방향 추정은 이 중요한 작업을 위한 중요한 단계 중 하나압니다.
- Monocular 3D object detection에서 orientation 관련 개념으로 언급되는 개념이
allocentric orientation과egocentric orientation입니다. 이번 글에서는 자율주행차 관점에서의 2가지 orientation에 대하여 다루어보도록 하겠습니다.
Egocentric과 Allocentric
egocentric orientation에서egocentric의 사전적 의미는자기 중심적인입니다. 자율주행차량 관점에서의 의미는 자차의 카메라를 기준으로 한 방향을 의미합니다. 반면allocentric orientation의allocentric의 사전적 의미는타인 중심의이며 자율주행차량 관점에서는 자차 이외의 차량을 기준으로 한 방향을 의미합니다.egocentric orientation은 차량들의global orientation이라고도 하며 자차의 카마레 좌표계에allocentric orientation은local orientation또는observation angle이라고도 하며egocentric과는 다르게 참조하는 frame이 관심 대상에 따라 변합니다. 각각의 차량에 따라 개별적인 좌표계를
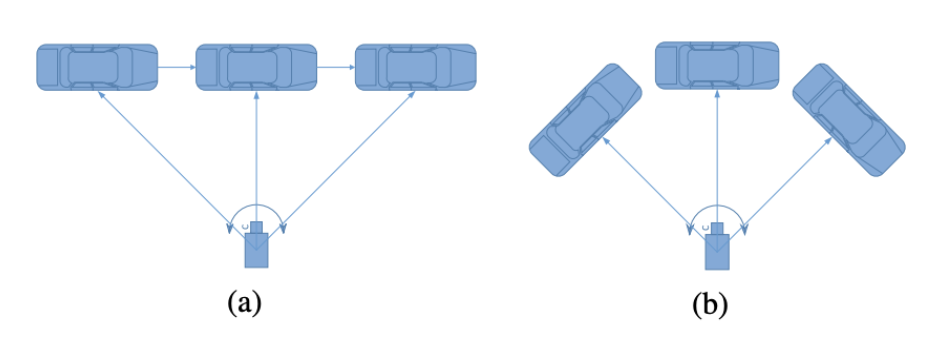
- 위 그림의 (a)를 살펴보면 차들이 왼쪽에서 오른쪽으로 이동하고 있는 상태 입니다. 차들의 입장에서는 같은 방향을 바라보고 있지만 차와 카메라의 방향은 왼쪽에서 오른쪽으로 이동하면서 계속 바뀌는 것을 확인할 수 있습니다.
- 반면 그림 (b)에서는 차들의 방향은 서로 다릅니다. 하지만 차들과 카메라의 방향은 모두 같은 것을 알 수 있습니다.
- 위 그림을 통해 확인할 수 있는 내용은 단안 카메라의 이미지는
local orientation을 따르며 추정해야 하는 것 또한local orientation임을 알 수 있습니다.

- 위 그림에서 왼쪽 crop 된 차들의 이미지를 보면 crop된 이미지 상에서 차의 방향은 계속 변합니다. 하지만 전체 이미지를 보면 차의 방향은 변화하지 않고 같은 방향의 직선 구간을 주행하고 있습니다.
- 따라서 왼쪽의 crop된 패치만을 이용해서는 차의
global orientation을 추정하기는 어렵습니다. 따라서 이미지 전체에서 차의 의미를 파악하여 global orientation을 추정하는 것이 중요합니다. 반면에,local orientation는 이미지 패치 하나만으로도 구할 수 있습니다.
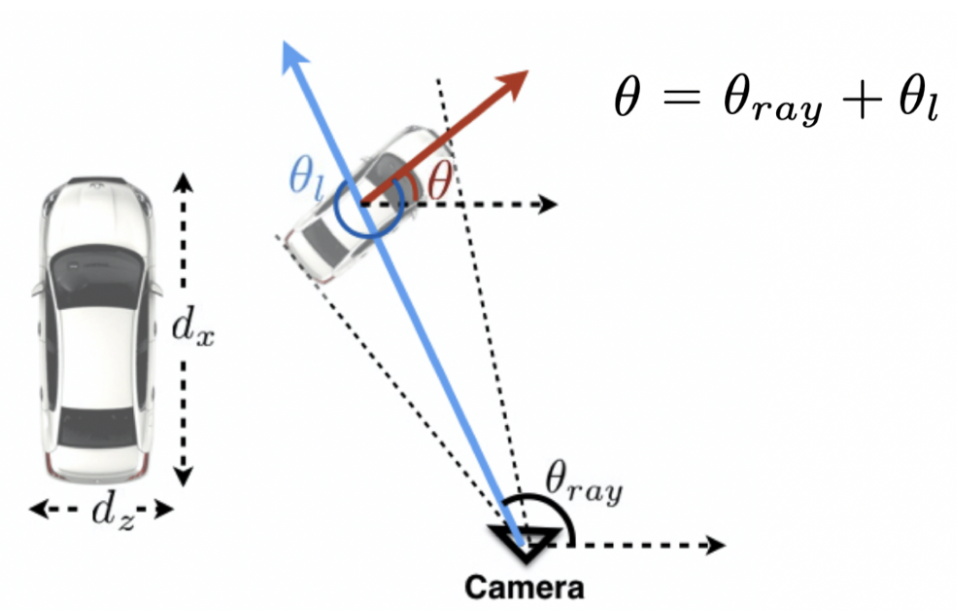
- KITTI 데이터셋에서는 roll과 pitch를 0으로 둡니다. 이와 같은 방법을 사용하면 orientation은 단순히
yaw값으로 축소시킬 수 있습니다. 따라서 위 그림의 2가지 방향을global yaw와local yaw2가지로 나타낼 수 있습니다.