Self-Supervised Surround-View Depth Estimation with Volumetric Feature Fusion
2023, Mar 18
- 논문 : https://openreview.net/forum?id=0PfIQs-ttQQ
- 발표 자료 : https://nips.cc/virtual/2022/poster/54283
- 이번 글에서는
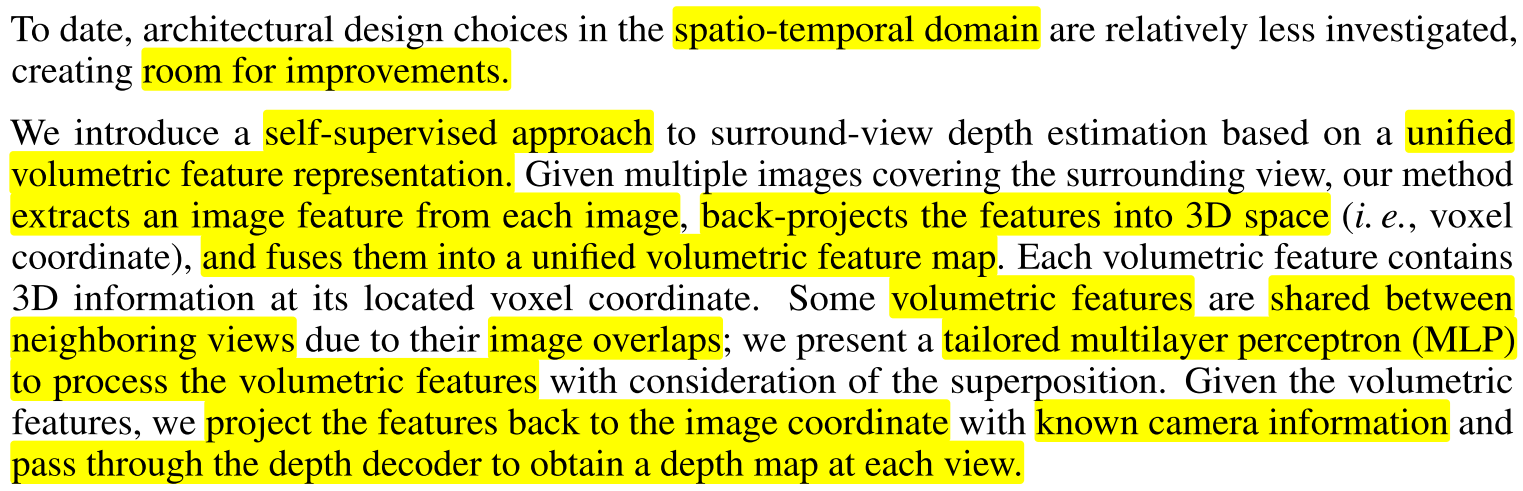
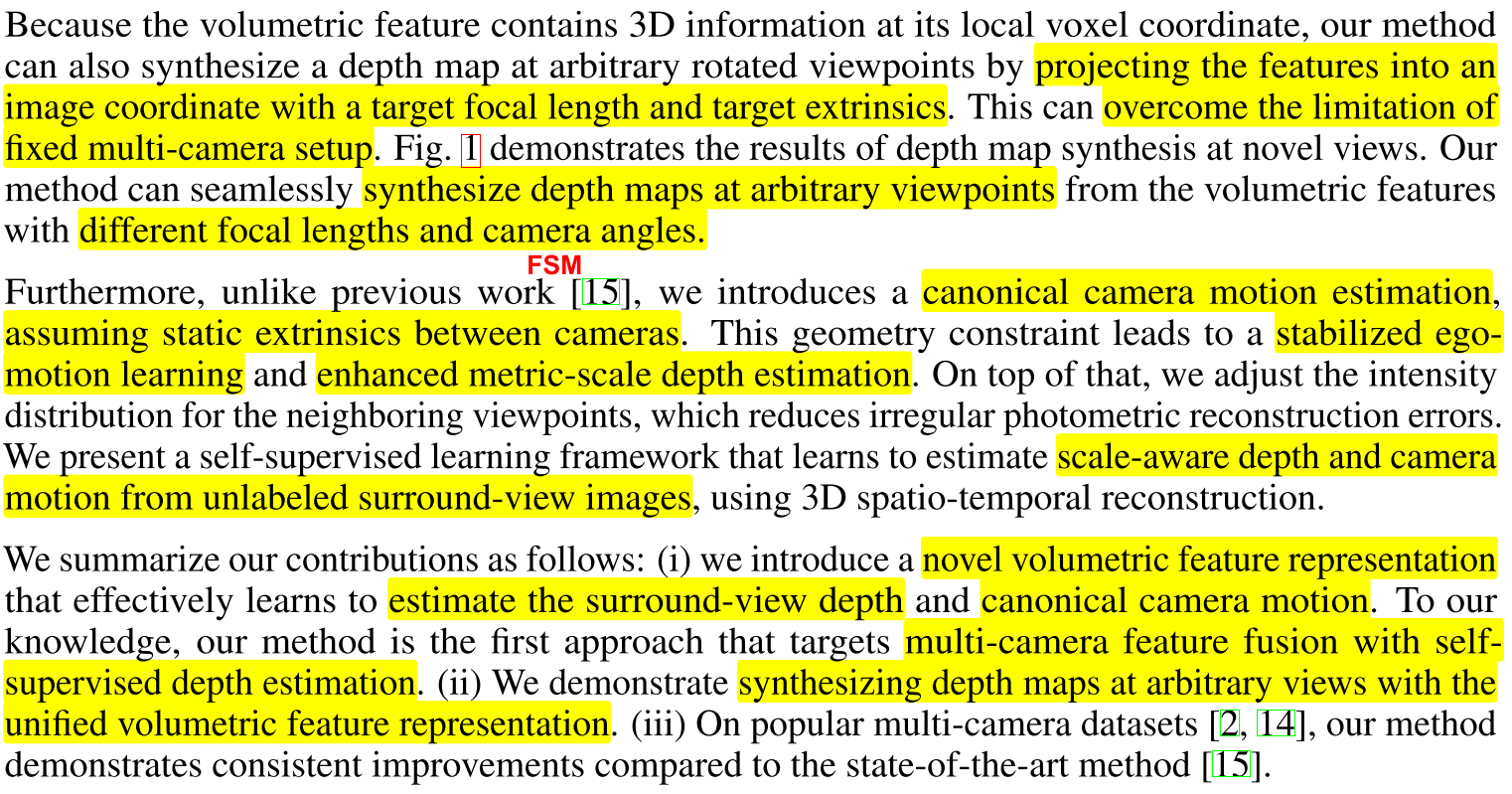
NIPS 2022에 발표된Self-Supervised Surround-View Depth Estimation with Volumetric Feature Fusion논문에 대한 내용 리뷰를 진행하겠습니다. - 논문에서 주목하고자 하는 부분은 멀티 카메라를 사용하였을 때 카메라 간 겹치는 영역이 발생하는데 그 영역에 대하여 어떻게 Fusion을 잘 할 지에 대한 방법과 그 효과를 보여줍니다. 이 방법을 논문에서는
Volumetric Feature Fusion이라고 명하였습니다.
목차
-
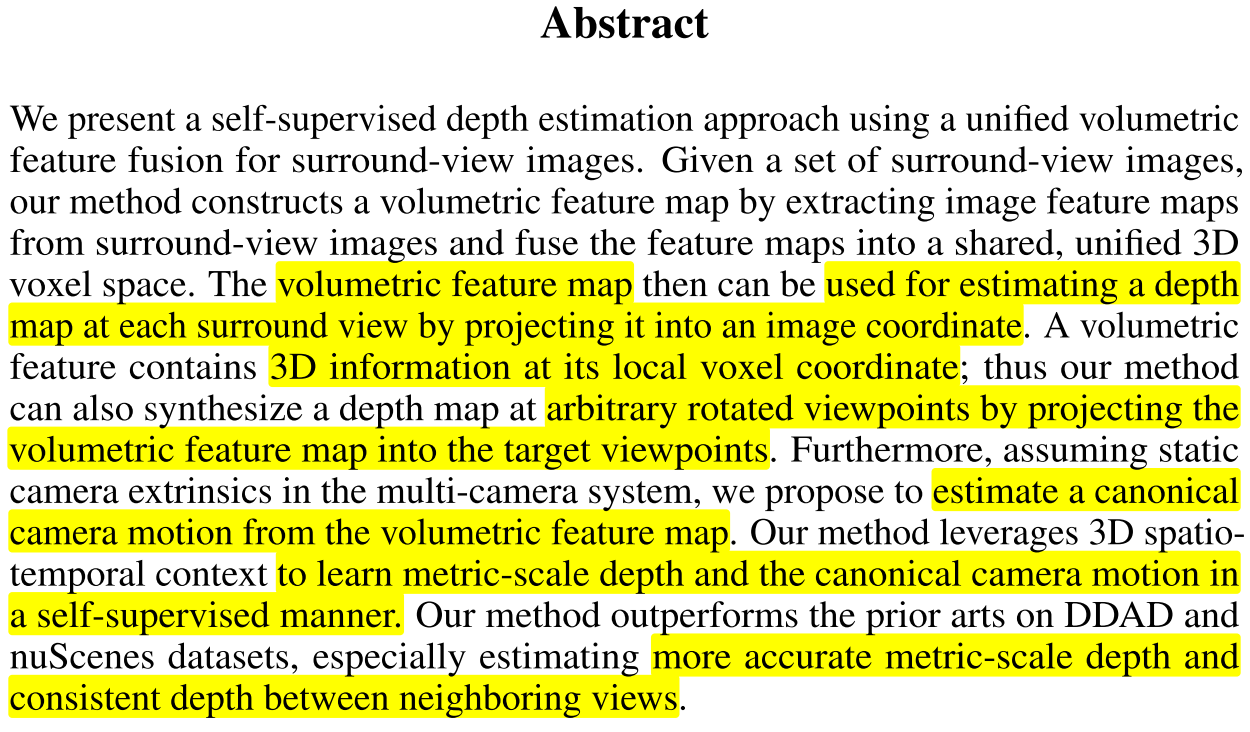
Abstract
-
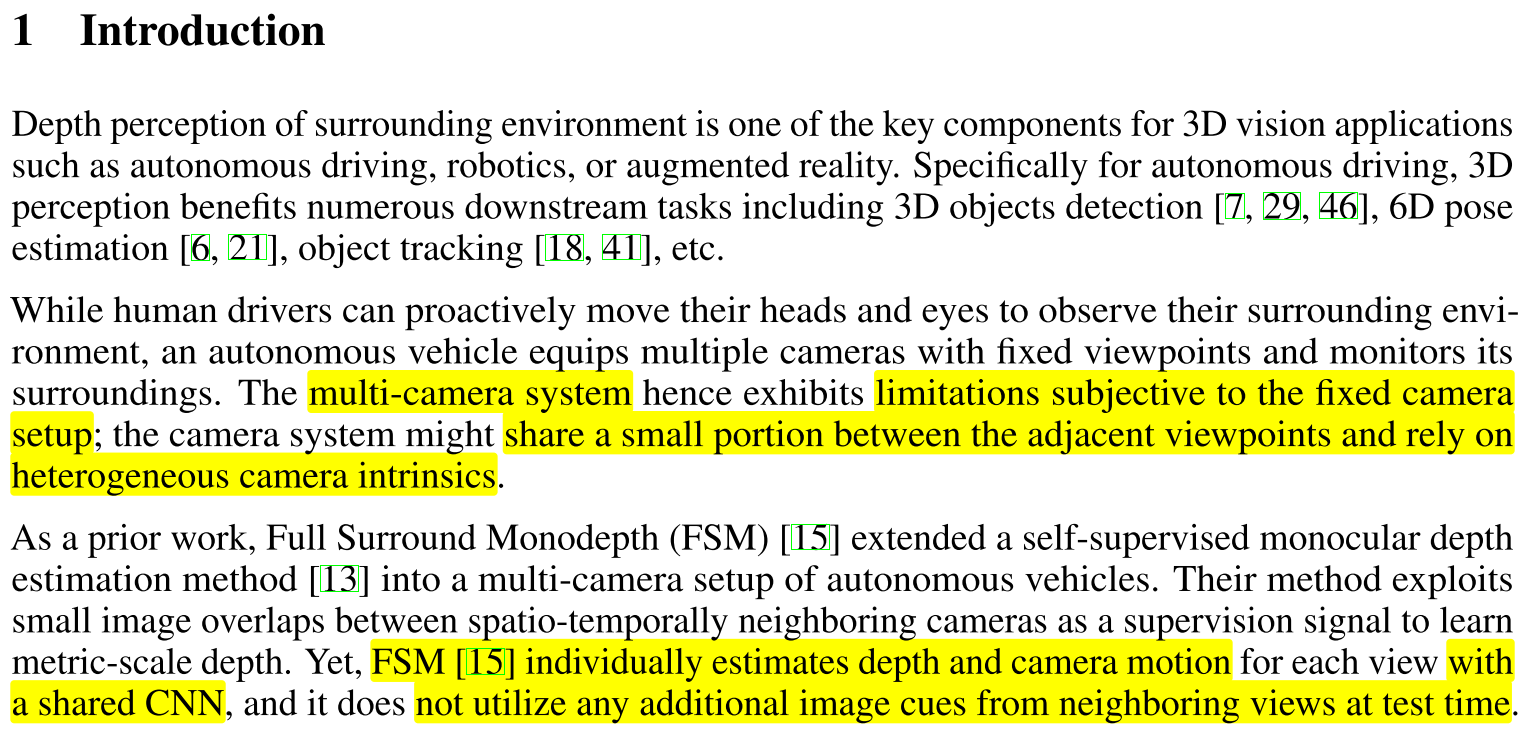
Introduction
-
Related Work
-
Surround-View Depth Estimation via Volumetric Feature Fusion
-
Experiments
-
Conclusions
-
Supplementary
-
42dot dataset
Abstract
Introduction
Related Work
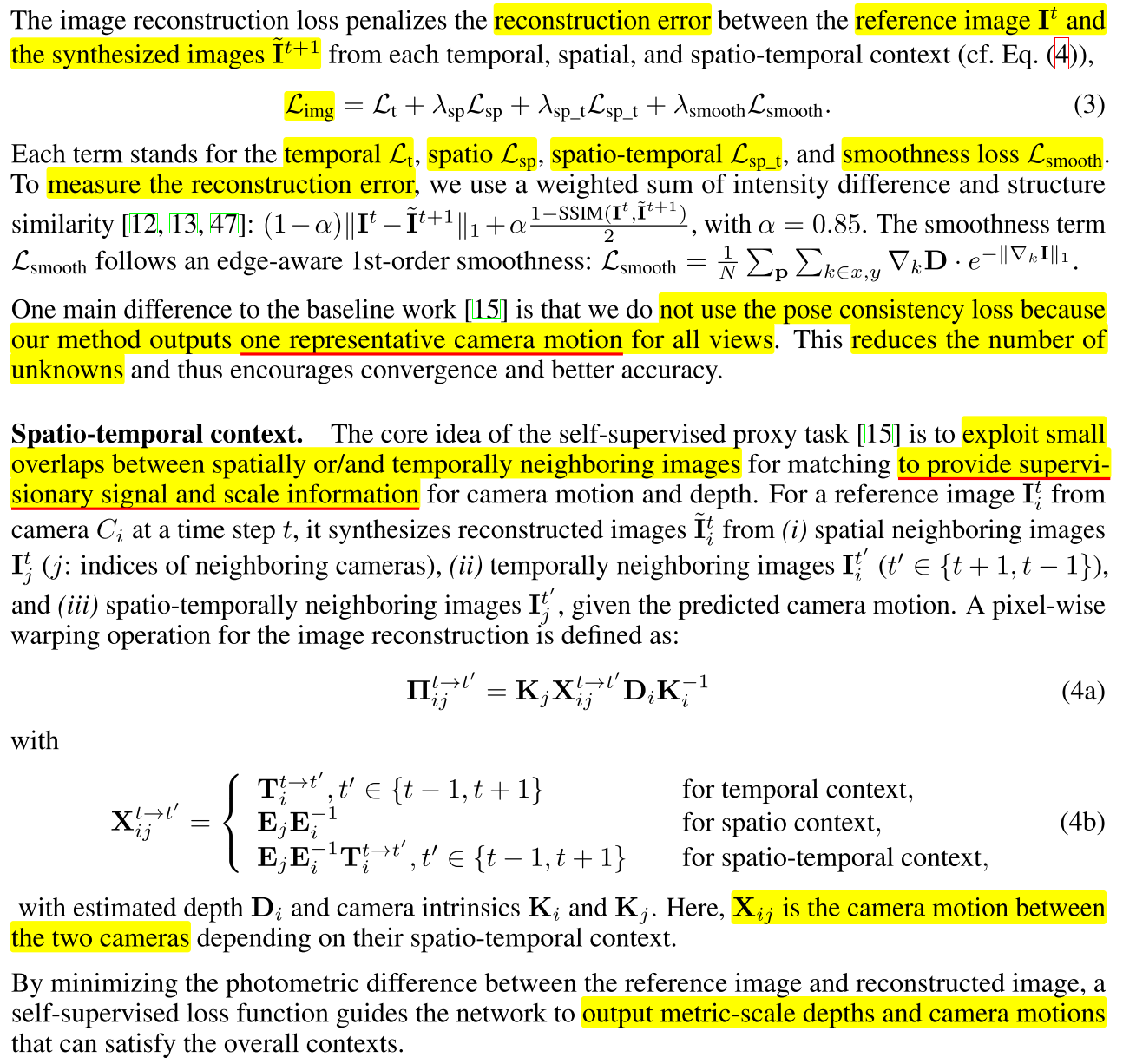
Surround-View Depth Estimation via Volumetric Feature Fusion
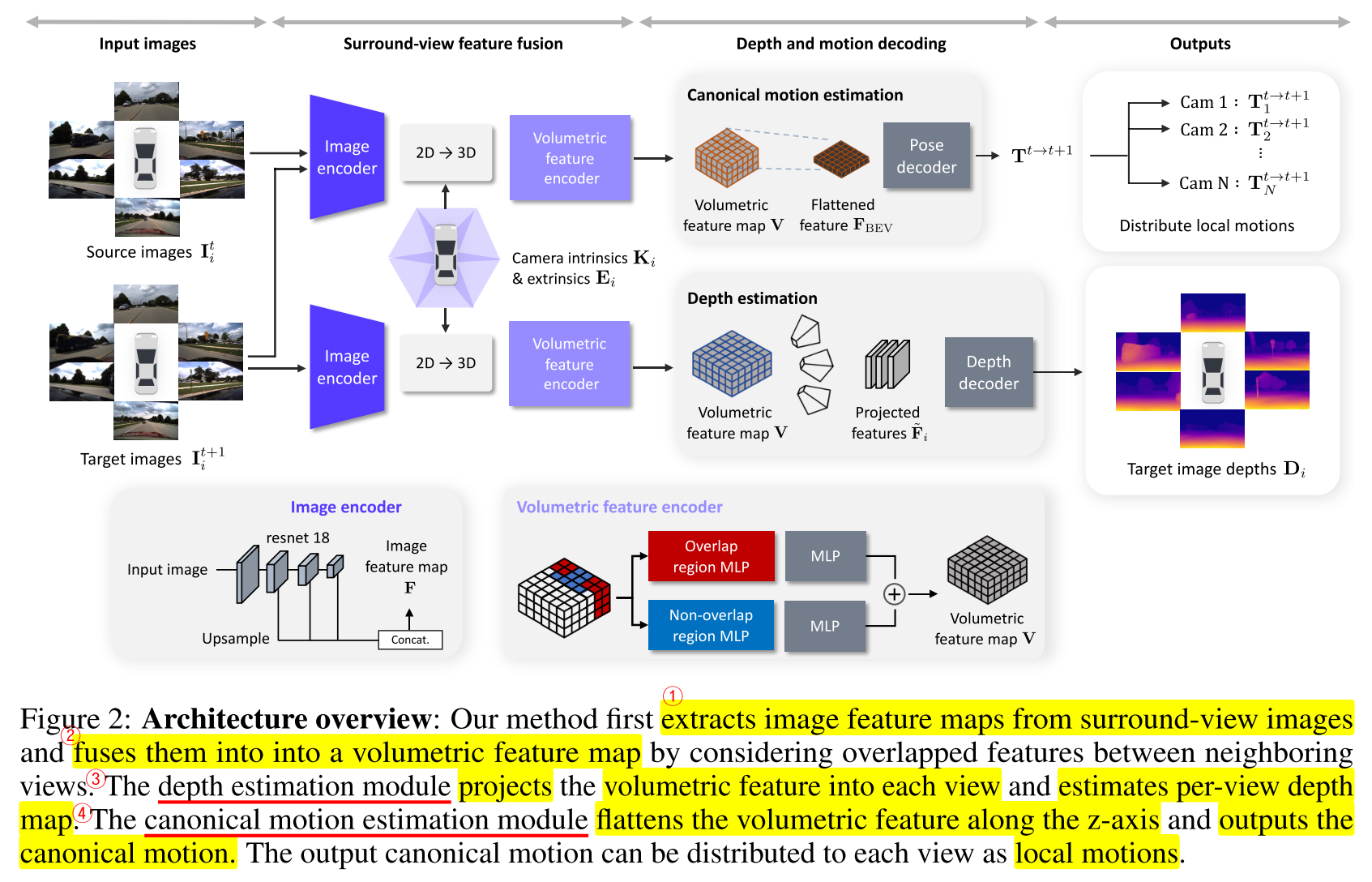
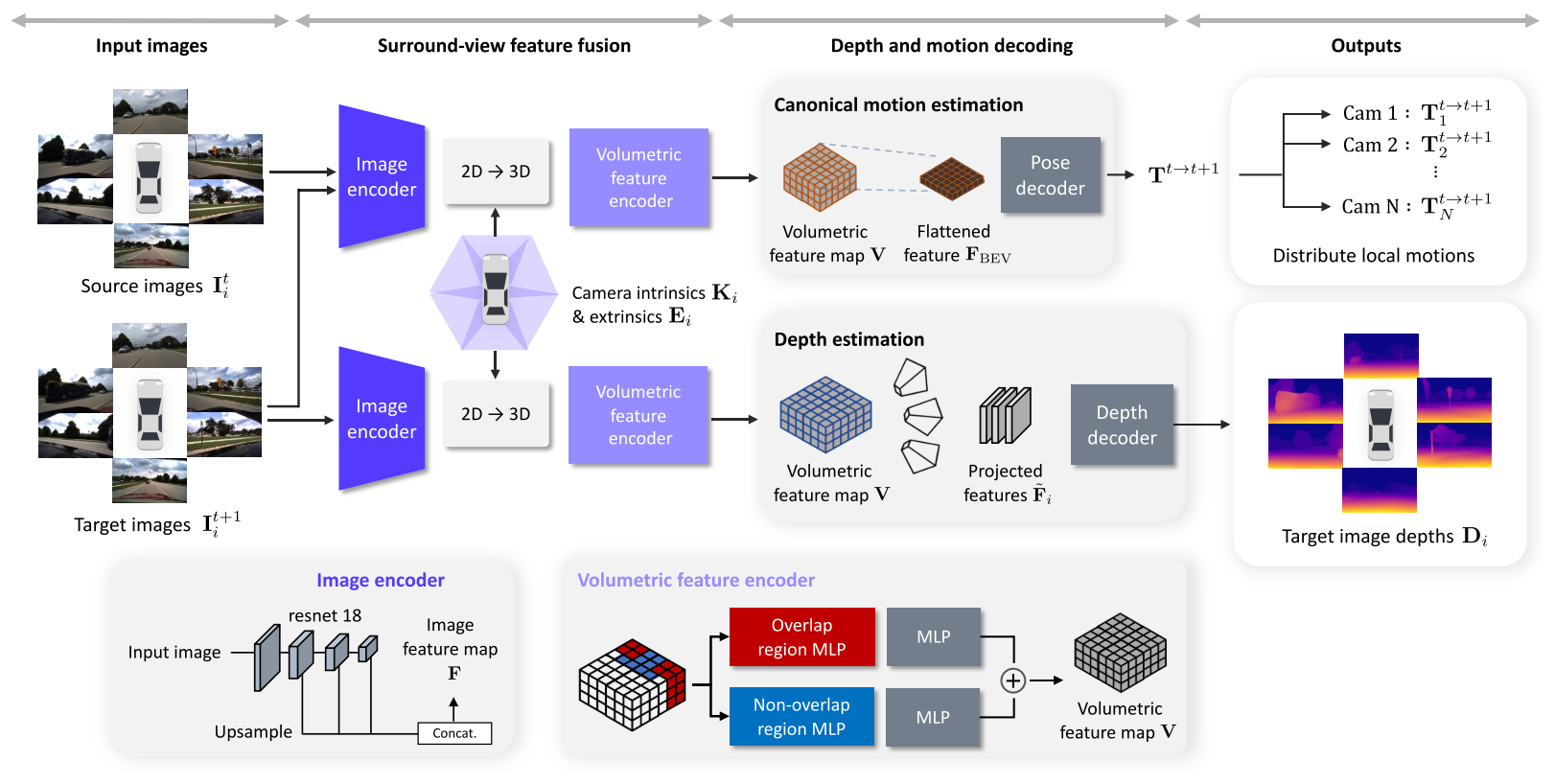
Architecture overview
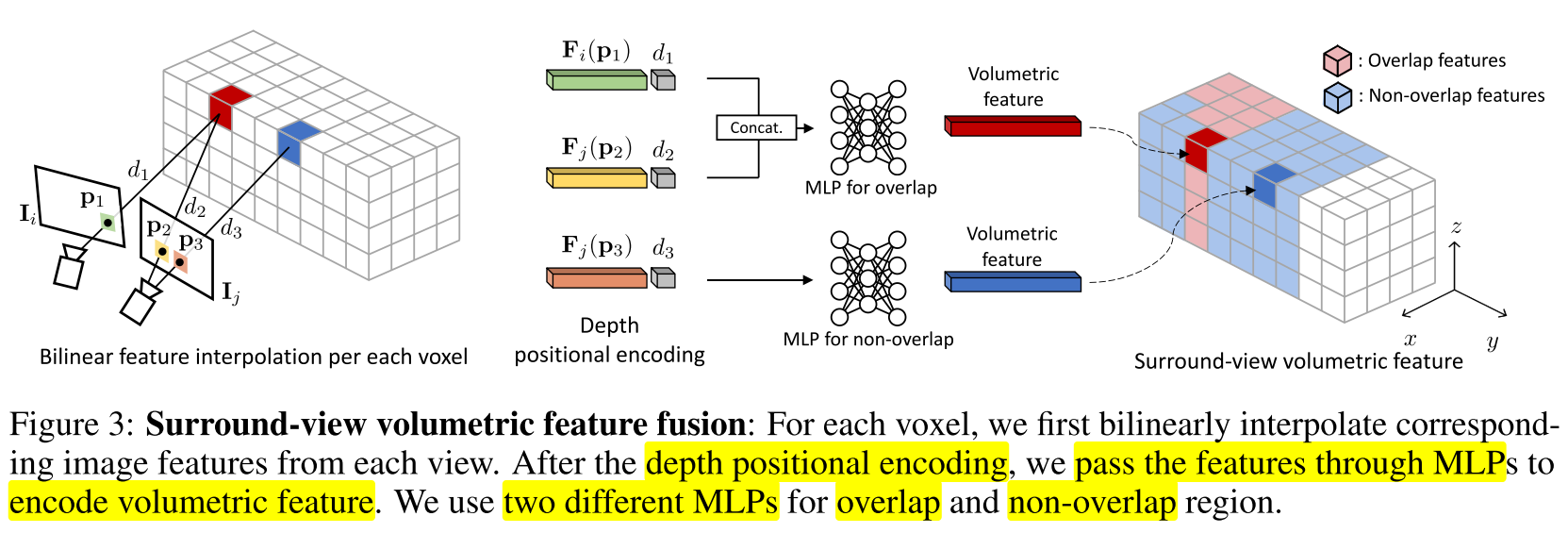
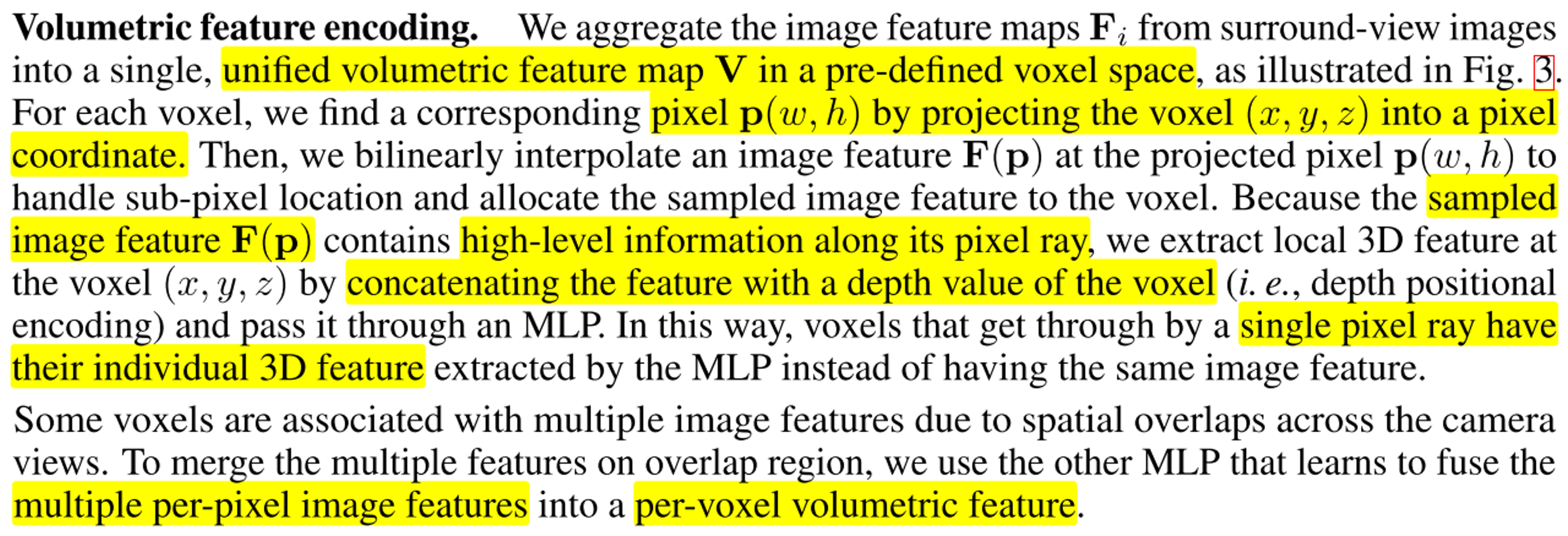
Surround-view volumetric feature fusion
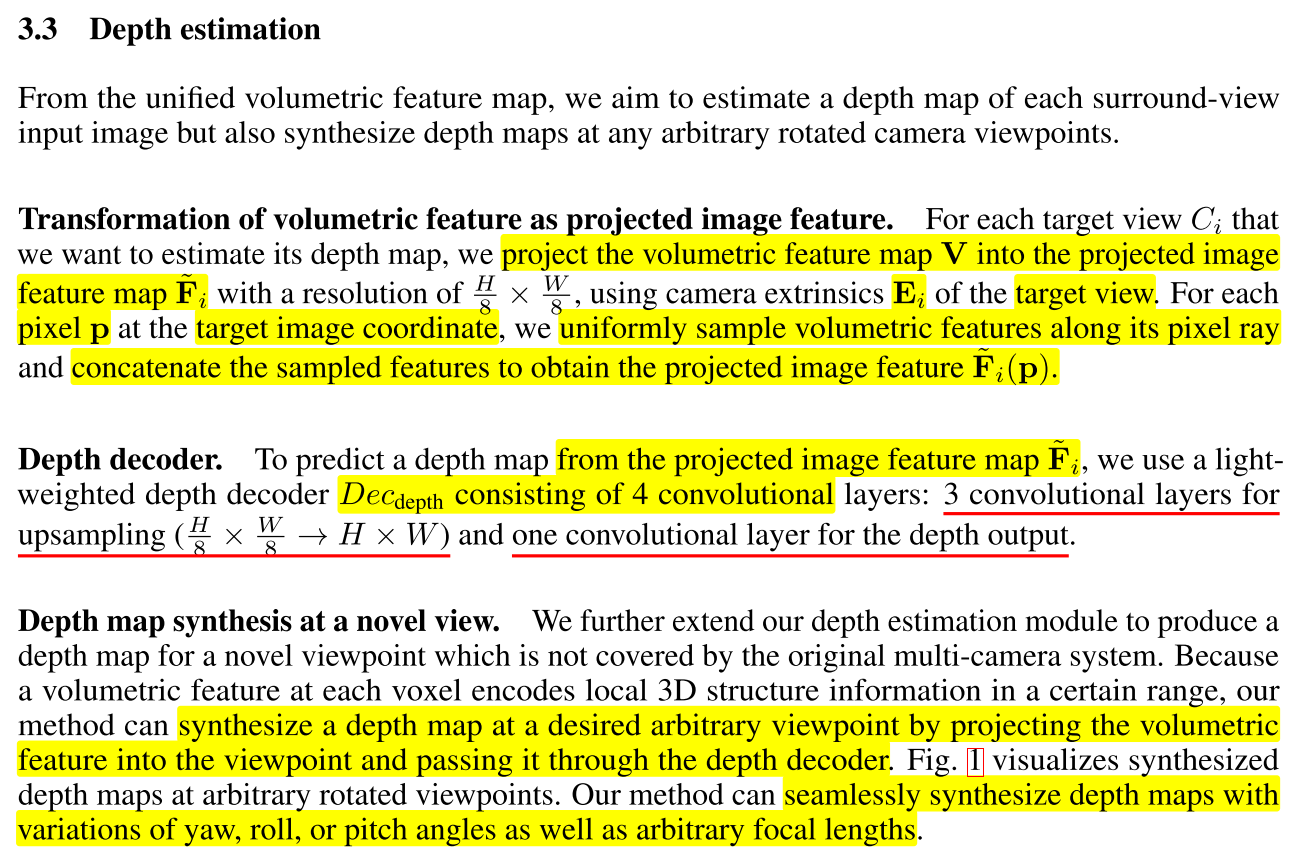
Depth Estimation
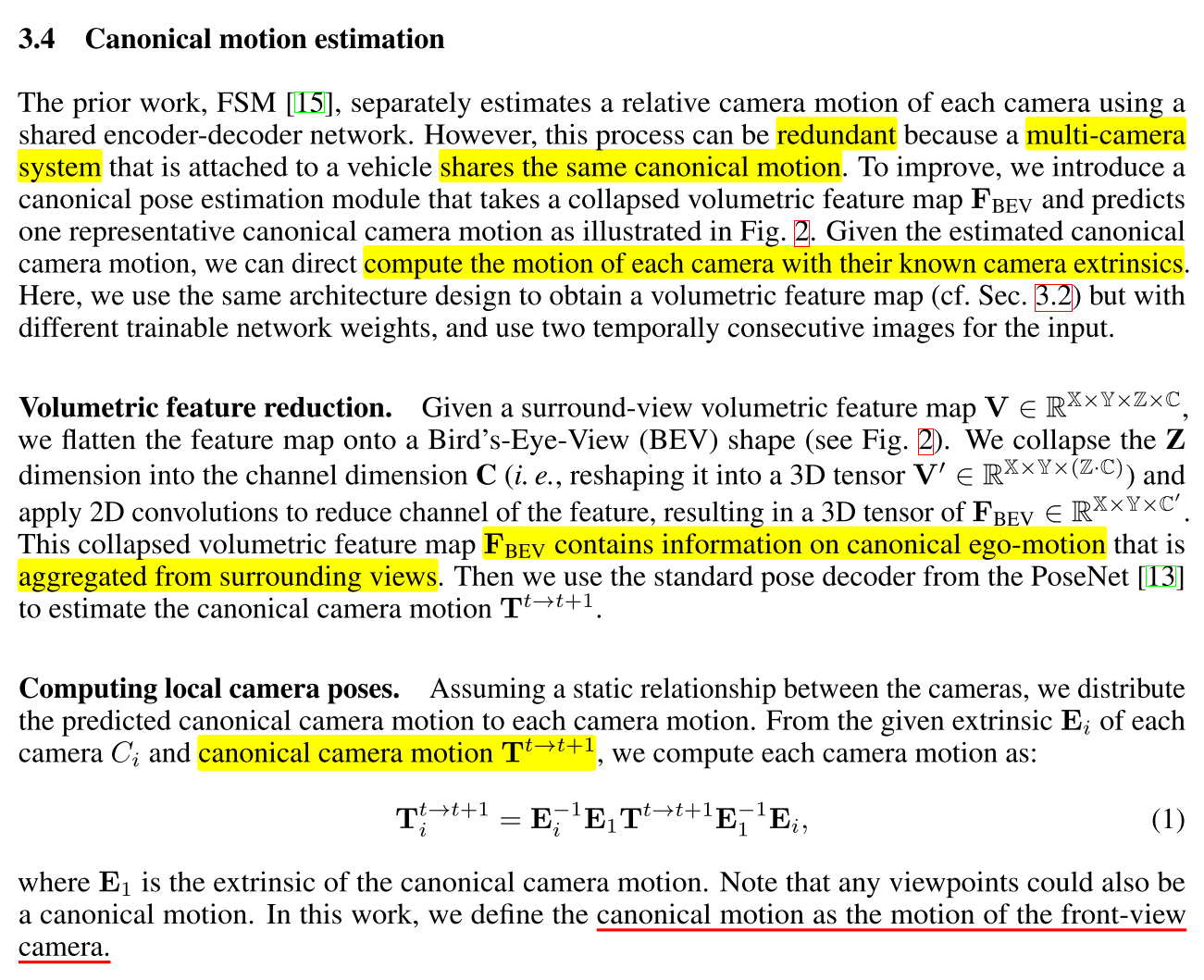
Canonical motion estimation
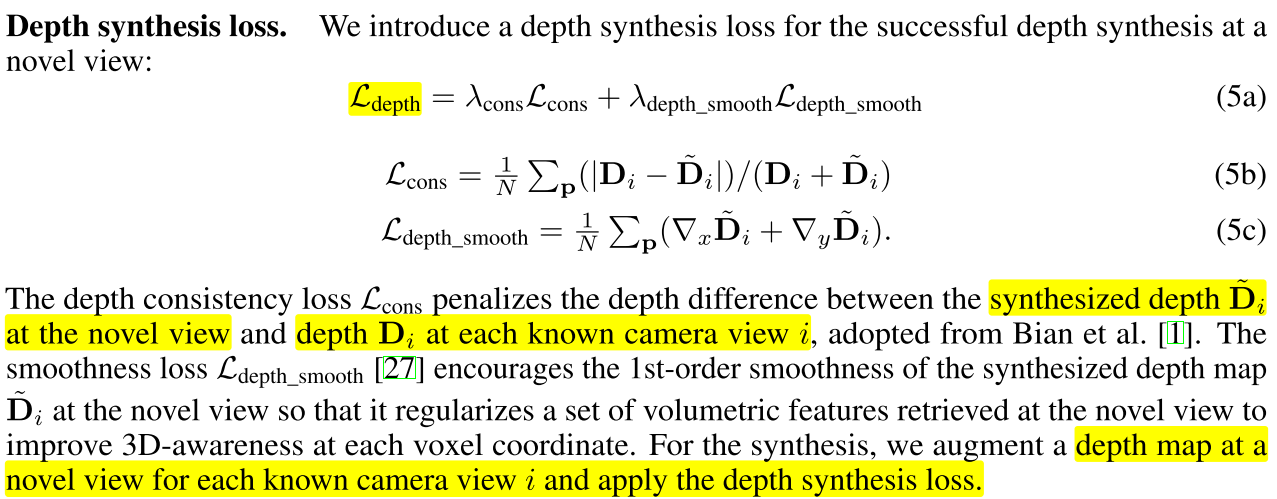
Self-supervised learning
Experiments
Conclusions
Supplementary
42dot dataset
- 아래 링크에서 42dot 데이터셋을 받아볼 수 있습니다.
- 링크 : https://www.42dot.ai/akit/dataset/mcmot
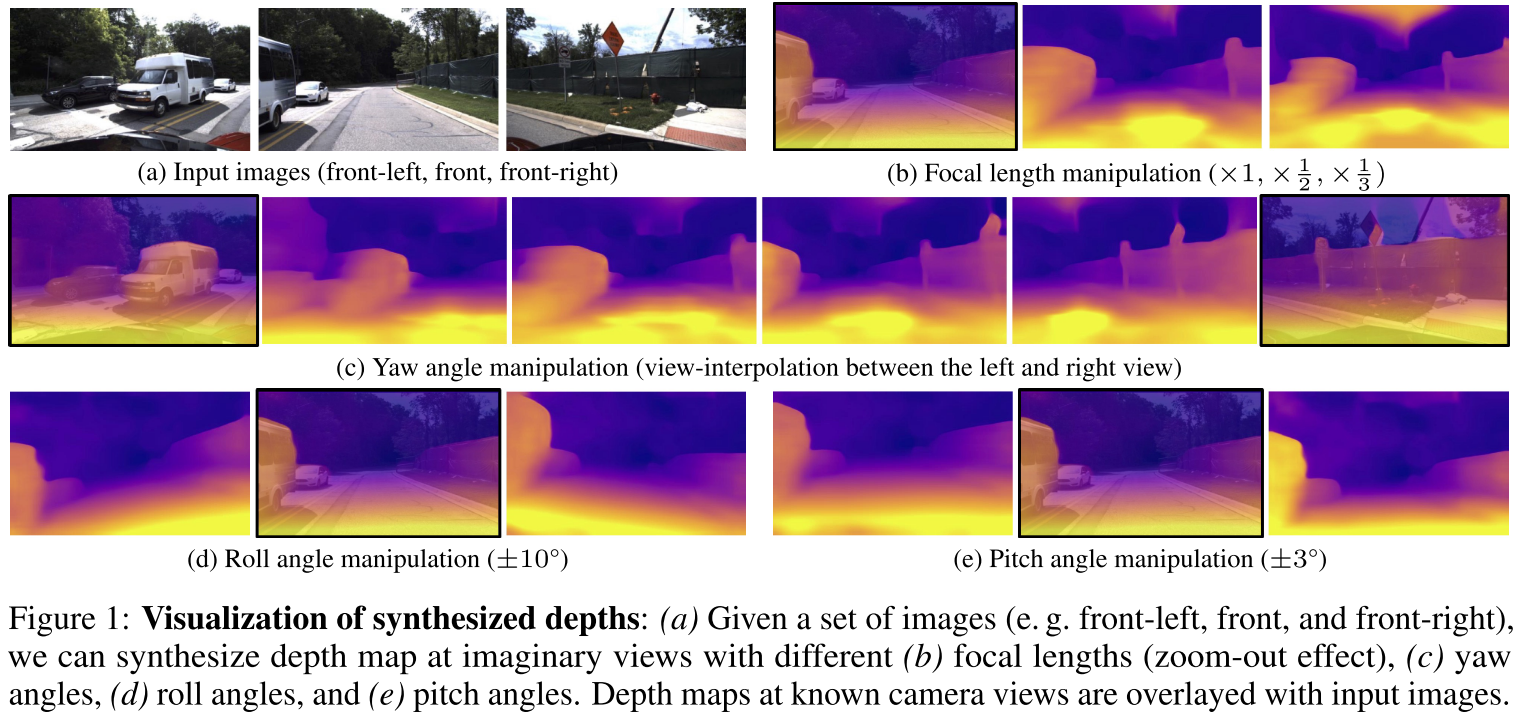
- 본 논문에서는
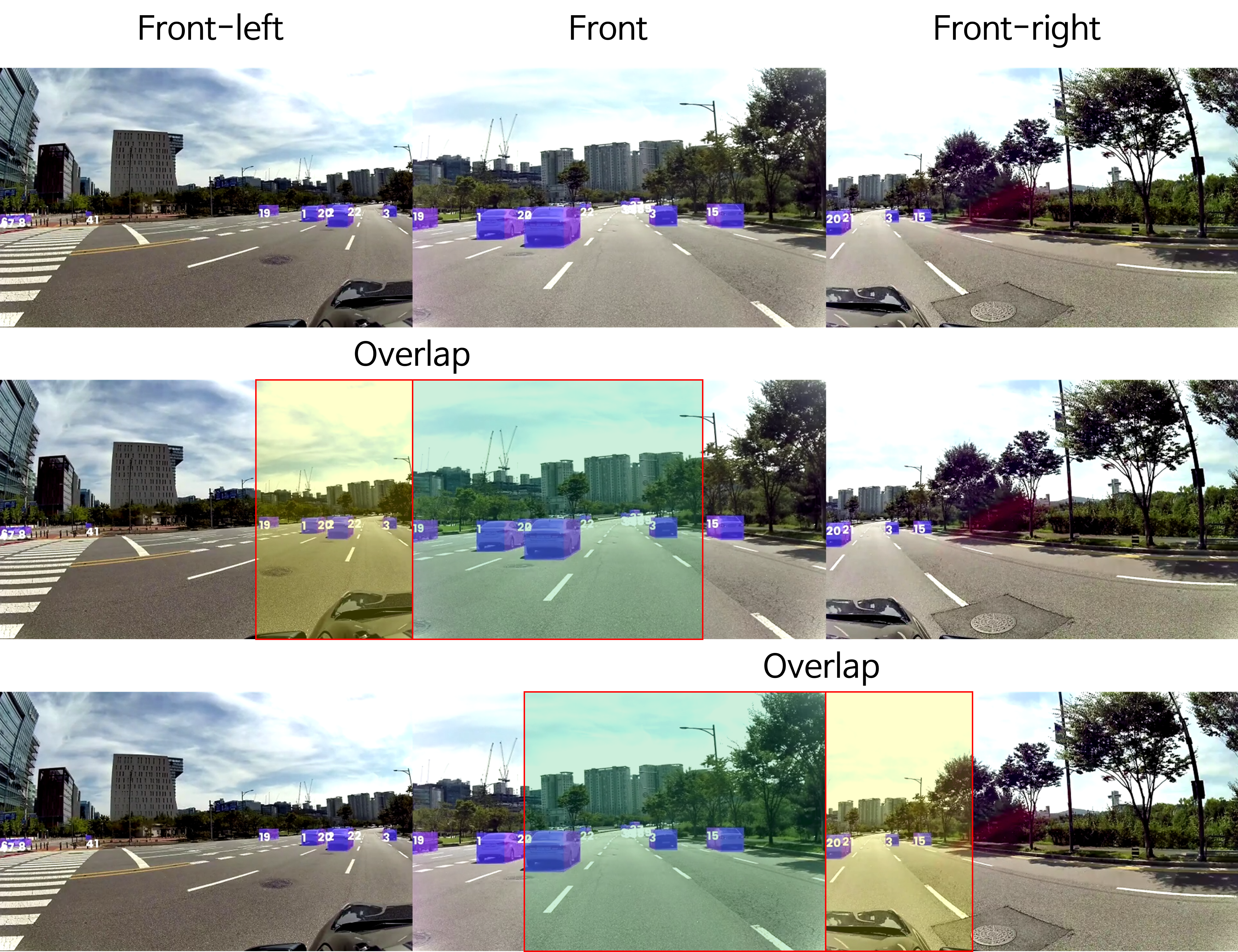
front,front-left,front-right에 대한 시각화 사례가 있었는데, 42dot 데이터셋을 보면front,front-left,front-right을 사용한 것을 볼 수 있습니다. 링크의 설명은 보면front는 60도 화각의 카메라이며front-left,front-right는 120도 화각의 카메라임을 알 수 있습니다. - 아래는
volumetric feature fusion을 한 영역으로 추정되는 영역을 표시하였습니다.