
옵티컬 플로우 (Optical Flow) 알아보기 (Luckas-Kanade w/ Pyramid, Horn-Schunck, FlowNet 등)
2019, Dec 26
- 참조 : 컴퓨터 비전 (오일석 저)
- 참조 : https://powerofsummary.tistory.com/35
- 참조 : https://learnopencv.com/optical-flow-in-opencv/
- 참조 : Introduction to Computer Vision
- 참조 : http://www.cse.psu.edu/~rtc12/CSE486/lecture30.pdf
- 참조 : https://www.ri.cmu.edu/pub_files/pub3/baker_simon_2002_3/baker_simon_2002_3.pdf
- 참조 : http://www.cs.cmu.edu/~16385/s17/Slides/14.3_OF__HornSchunck.pdf
- 이번 글에서는 object의 움직임과 관련된 개념 중 하나인
optical flow에 대하여 알아보도록 하겠습니다.
목차
-
연속 영상에 관한 지식
-
Optical flow의 의미와 추정 원리
-
Lucas-Kanade 알고리즘
-
Hierarchical Lucas-Kanade 알고리즘
-
Horn-Schunck 알고리즘
-
Optical flow 알고리즘 성능 동향
-
Optical flow의 활용
-
OpenCV를 이용한 Optical flow 예제
-
딥러닝을 이용한 Optical Flow 구하기
연속 영상에 관한 지식
- 먼저 연속된 영상이 입력될 때 사용되는 용어로
Frame이 있습니다. Frame은 연속 영상 (동영상)을 구성하는 각각의 영상을 뜻하며 시간 축 \(t\)를 가지게 됩니다.
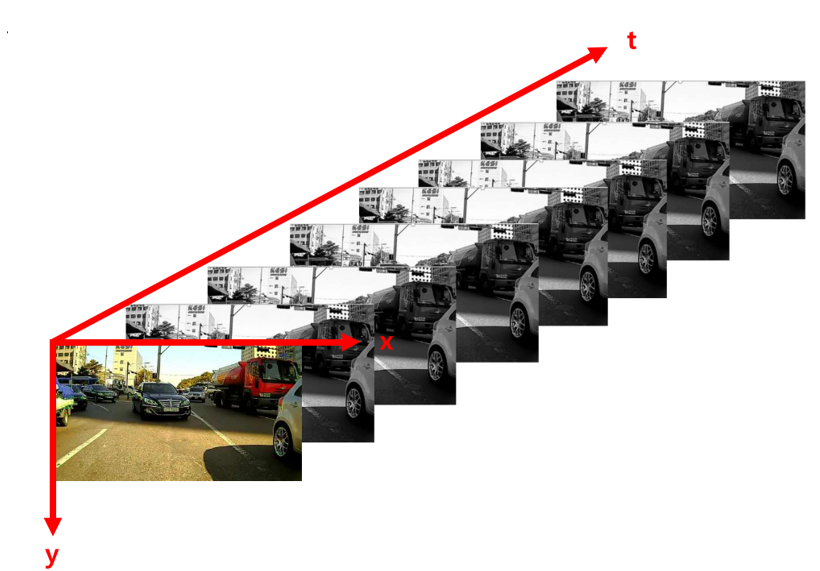
- 위 그림과 같이 기존에 이미지 좌표계인 \(y, x\) 이외의 \(t\) 축이 더 추가되며 1 초당 몇 번의 Frame을 다루는 지에 따라서
FPS(Frame Per Second)라는 단위를 사용합니다. 예를 들어 30 fps는 30 frame / sec 즉, 1초당 30개의 이미지를 다룬다는 뜻입니다. - 동영상에서 다루는 fps는 어떤 영상을 다루는 지에 따라서 다르게 설정됩니다. 예를 들어 일반 웹캡이나 감시 카메라 등은 일반적으로 10 ~ 30 fps를 사용합니다.
- 일반적으로 연속된 Frame이 들어올 떄, 영상은
영상 일관성(coherence)이라는 성질을 가집니다.

- 예를 들어 어떤 픽셀 (y, x)의 색이 빨간색이라면, 주변 픽셀의도 유사한 색을 띌 가능성이 높다는 것입니다.
- 연속된 Frame에서의 또 다른 성질 중 하나는
시간 일관성입니다.
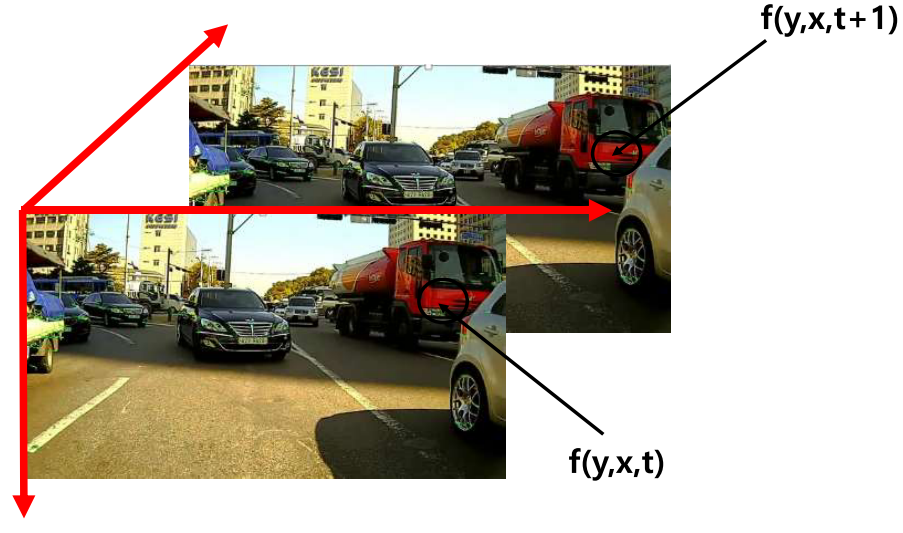
- 즉, \(t\) 순간의 픽셀 값 \(f(y, x, t)\)는 다음 순간 \(f(y, x, t + 1)\)과 비슷할 가능성이 높습니다. 만약 픽셀값의 변경량이 거의 없다면 그 만큼 이동량이 작다고 직관적으로 생각할 수 있습니다.
- 보통 가장 직관적인 방법으로 두 Frame 간의 픽셀값의 차이를 통하여 변화를 확인하는 방법이 있습니다.
- 예를 들어 \(r\)번째 Frame과 \(t\) 번째 Frame의 픽셀 값의 차이를 계산한다고 가정해 보겠습니다.
- \[f(n) = \begin{cases} 1, & \vert f(y, x, t) - f(y, x, r) \vert > \tau \\[2ex] 0, & \text{else} \end{cases}\]

- 위 식을 이용하여 영상 간의 차이를 구하면 영상에서의 움직임을 구할 수 있습니다. 이 경우는 굉장히 간단하지만 한계점도 명확히 있습니다.
- 먼저, 위치가 고정된 카메라에서만 적용 가능하고 배경과 물체의 색상이나 명암에 큰 변화가 있는 경우 사용할 수 없습니다.
- 따라서 두 영상의 차이를 구하는 한계를 개선하기 위하여 실제 영상에서 움직이는 물체를 찾을 필요가 있습니다.
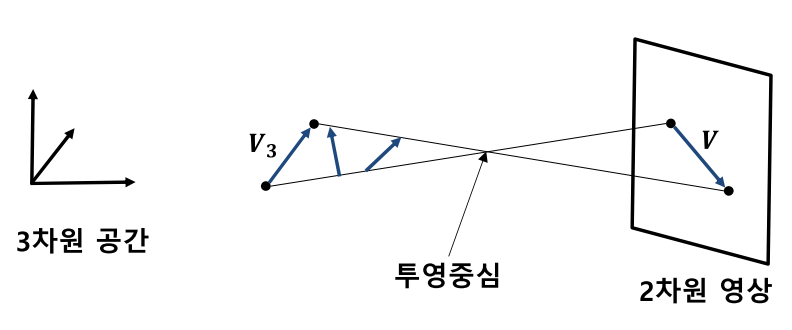
- 물체의 이동이 발생할 때, 3차원 실제 공간에서 일어나는 물체의 움직임은 2차원 영상 공간에 투영됩니다. 이 때, 차원이 축소되면서 투영되기 때문에 3차원 공간의 무수히 많은 벡터가 2차원 영상 공간 상의 벡터로 투영될 수 있습니다.
- 여기서
motion field라는 개념이 필요합니다.
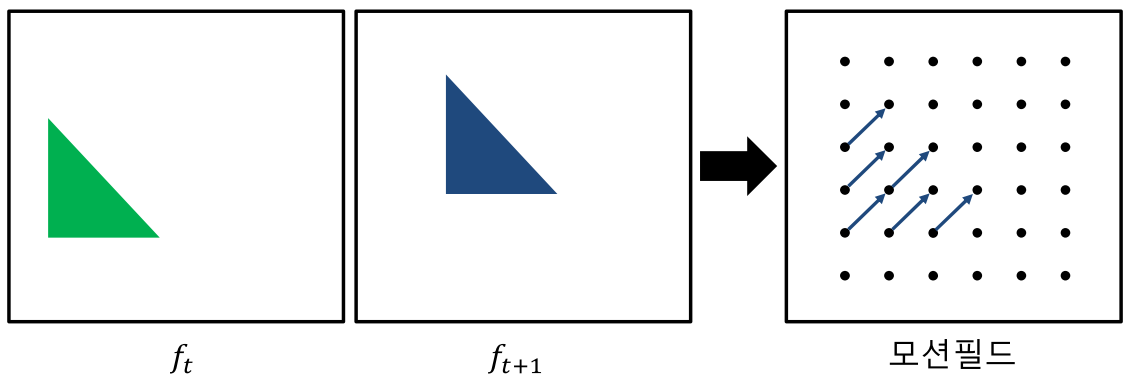
motion field는 움직임이 발생한 모든 점의 모션 벡터로 얻어낸 2차원 모션맵을 뜻합니다.- 위 그림을 보면 초록색 삼각형( \(t\) )이 파란색 삼각형(\(t+1\))과 같이 이동하였을 떄, 픽셀들이 일관성 있게 이동한 것을 확인할 수 있습니다. 따라서 위 그림과 같은 상황에서는 이상적으로 motion field를 구할 수 있습니다.

motion field를 구하여 분석하면 위 그림과 같이 움직인 픽셀에 대한 정보를 추정할 수 있습니다.
- 물론 근본적으로 현실 이미지에서는 위 그림 예시들과 같은 motion field를 정확하게 구하기는 어려울 수 있습니다. 대표적으로
구체 회전과광원 회전과 같은 어려움이 있습니다.
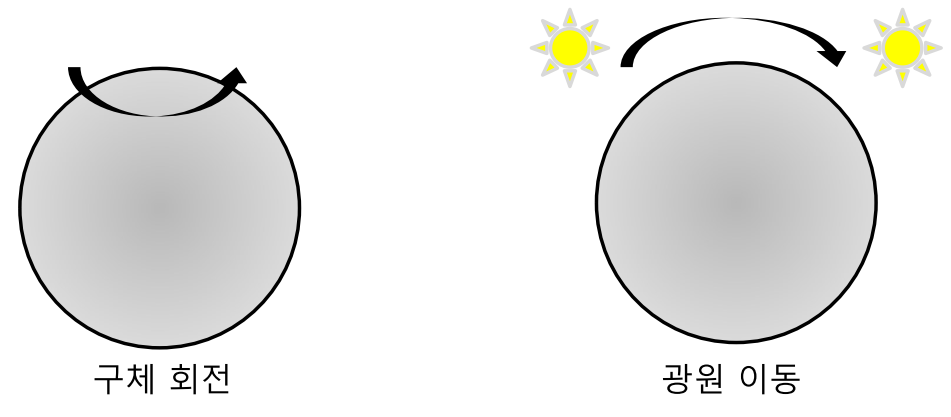
- 구의 texture가 단조로운 상태에서 회전이 발생한다면 모션 벡터가 발생함에도 불구하고 영상에는 아무런 변화가 발생하지 않습니다.
- 반면 구가 회전하지 않지만 광원이 움직이는 경우에는 모션 벡터가 0이어야 하지만 영상에는 변화가 발생합니다.
- 즉, 실질적으로 움직였지만 모션 벡터가 발생하지 않는 경우와 움직임이 발생하지 않았지만 모션 벡터가 발생하는 오인식 경우가 문제가 되곤 합니다.
- 따라서
Temporal Feature를 구하는 것이 중요합니다. 이는 시간의 흐름에 따라 변하는 특징을 나타내며 움직이는 물체의 경우 잘 나타납니다.
- 앞에서 설명하였듯이, 픽셀의 움직임을
motion이라고 합니다. motion을 나타낼 떄에는 대표적으로 ① motion의 크기, ② X방향, Y방향의 모션, ③ Dominant Motion등을 나타냅니다.
Optical flow의 의미와 추정 원리
- 앞에서 설명한
Motion field를Optical field라고도 합니다. Optical Field는 수식으로 나타낼 수 있고 이 내용은 글의 뒷부분에서 다룰 예정입니다. - Optical flow는 Optical field를 구하기 위하여 이전 프레임과 현재 프레임의 차이를 이용하고 픽셀값과 주변 픽셀들과의 관계를 통해 각 픽셀의 이동(motion)을 계산하여 추출합니다. 이를 통하여 움직임을 구별해 낼 수 있습니다.
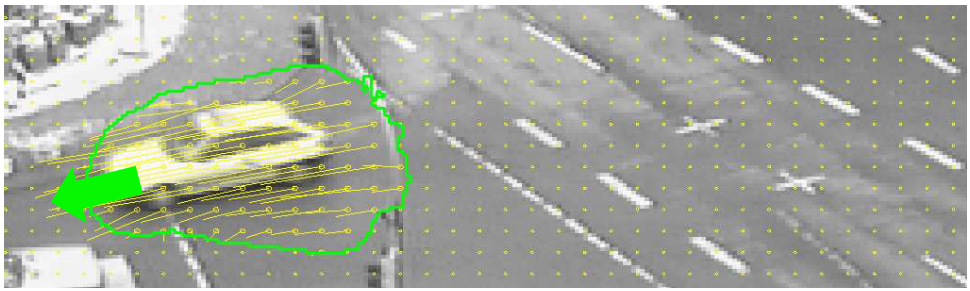
- Optical flow를 사용하면 위 그림 예시와 같이 차량의 움직임을 나타낼 수 있습니다. 그 결과 Optical flow가 좌측으로 발생하게 되는 것을 확인할 수 있습니다.
- 따라서 Optical flow 문제를 정의하면 위 그림과 같이 각 픽셀 별로 \(I(x, y, t) \to I(x, y, t+1)\) 를 어떻게 추정하는 지 구하는 문제가 됩니다.
- 지금부터 살펴 볼 optical flow는 인접한 두 장의 영상에 나타나는
명암 변화만을 고려합니다. optical flow 추정의 단계에서는 물체를 검출하거나 검출한 물체의 움직임을 반영하려는 시도를 하지 않게 때문에 물체와는 독립적인 추정 방식입니다. - optical flow는 계산 과정에서 개별 물체의 움직임을 명시적으로 반영하지는 않지만 물체가 움직이면 그에 따른 명암 변화가 발생하므로 암시적으로 물체의 움직임인
motion field를 반영한다고 말할 수 있습니다. (물론 구체 회전이나 광원 이동과 같은 한계 상황에서는 여전히 어려움이 있습니다.)
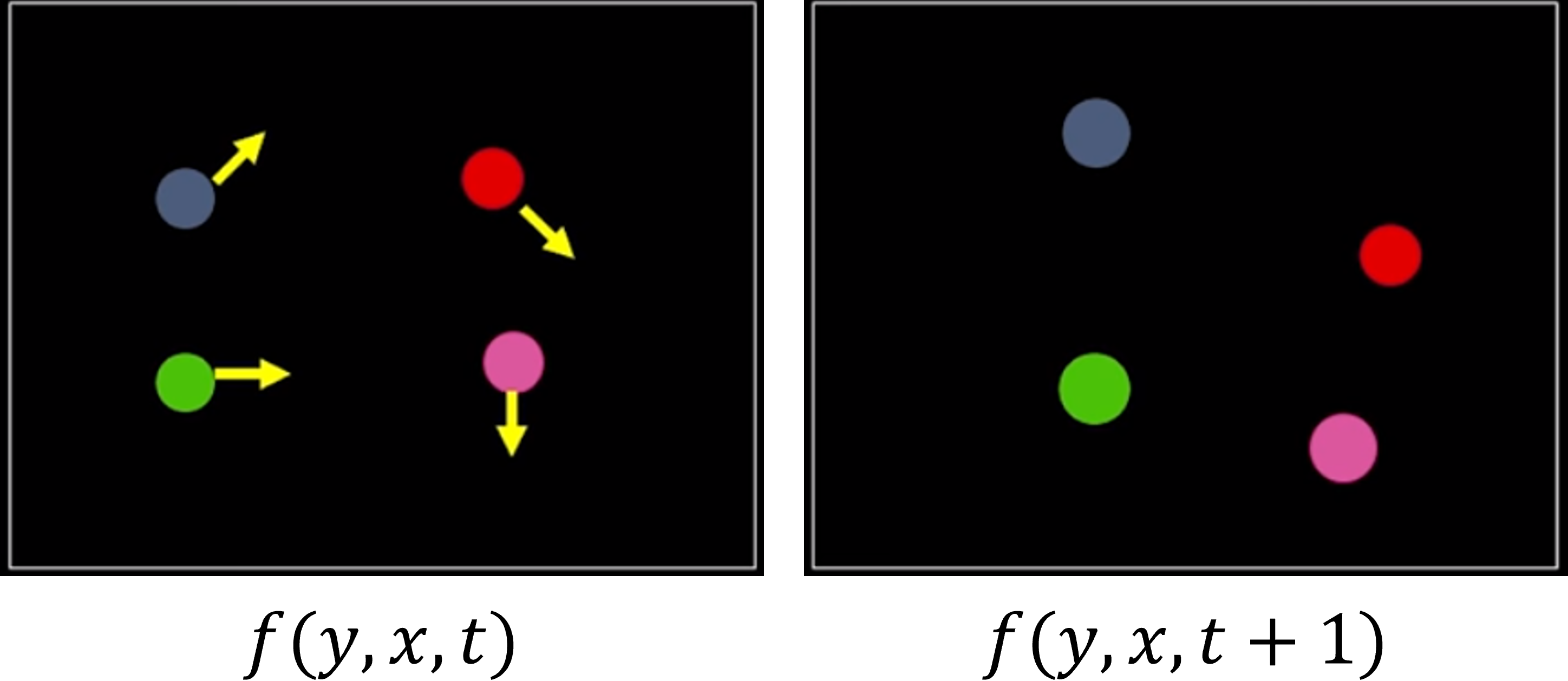
- 이와 같이 optical flow는 인접한 두 영상의 명암 변화를 분석하여 움직임 정보를 추정합니다. \(t\)라는 순간의 영상 \(f(y, x, t)\)와 짧은 시간이 흐른 후의 인접 영상 \(f(y, x, t+1)\)이 주어졌다고 가정해 보겠습니다.
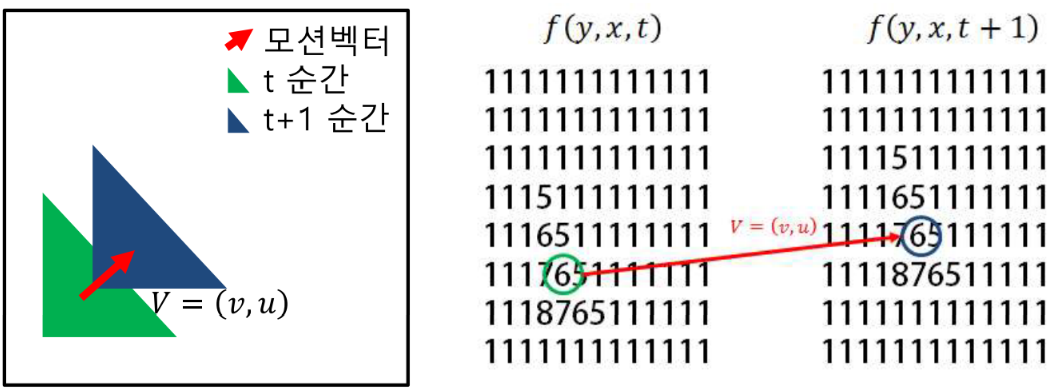
- 위 그림과 같이 optical flow 알고리즘이 추정해야 할 motion vector인 \(\vec{v} = (v, u)\)는 위 그림과 같습니다. 여기에서 \(v, u\)는 각각 \(y, x\)방향의 이동량에 해당합니다.
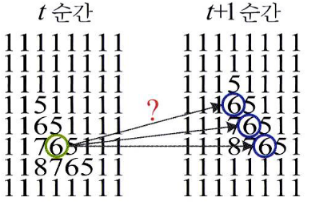
- 초록색의 \(t\) 순간의 삼각형이 파란색의 \(t+1\) 순간의 삼각형으로 이동하면서 영상에서의 그에 대응하는 픽셀도 이동하게 됩니다. 그 내용을 위 오른쪽 그림에서 살펴볼 수 있습니다. 하지만 \(t\) Frame의 어떤 픽셀이 \(t + 1\)의 어떤 픽셀과 대응이 되는 지 알아야 motion vector를 구할 수 있습니다. 이 문제가
optical flow 추정의 핵심입니다. - optical flow 추정 알고리즘은 카메라가 고정되지 않는 상황에서도 적용할 수 있어야 합니다.
- 만약 카메라가 고정되어 있는 상황이라면 optical flow에 등장하는 움직임은 모두 물체의 움직임으로 봐야 하고, 물체가 고정된 상황이라면 optical flow를 카메라 움직임으로 해석해야 합니다.
- optical flow를 추정하기 위해서는 현실을 훼손하지 않는 범위 내에서 적절하게
가정을 세웁니다. optical flow의 전제 조건 2가지는 다음과 같습니다.- ①
color/brightness constancy: 어떤 픽셀과 그 픽셀의 주변 픽셀의 색/밝기는 같음을 가정으로 세웁니다. - ②
small motion: Frame 간 움직임이 작아서 어떤 픽셀 점은 멀리 움직이지 않는 것을 가정으로 세웁니다.
- ①
- 앞의 그림을 다시 살펴 보면 \(f(y, x, t)\) 와 \(f(y, x, t+1)\) 의 4가지 픽셀은 \(t \to t+1\) 로 변경되더라도 색/밝기 항상성은 유지된다는 것과 움직임 또한 크지 않고 근처에 있음을 알 수 있습니다.
- 이 중 첫번째 전제 조건인
밝기 항상성은 optical flow의 가장 중요한 가정입니다. 연속한 두 영상에 나타난 물체의 같은 점은 명암값이 같거나 비슷하다는 뜻입니다.
- 위 이미지에서 \(t\) 순간의 영상에서 동그라미로 표시된 픽셀은 6이라는 명암을 가지므로 \(t + 1\) 순간의 영상에서도 이 픽셀은 6 또는 6과 아주 유사한 값을 가져야 한다는 조건입니다.
밝기 항상성에는 조명의 변화가 없어야 한다는 전제가 내표되어 있습니다. 또한 물체 표면과 광원이 이루는 각에 따라 변하는 명암 차이를 무시한다는 사실도 포함됩니다. - 현실적으로 밝기 항상성은 실제 세계에 정확히 들어맞지는 않습니다. 외부 환경도 변할 뿐 아니라 물체의 법선 벡터와 광원이 이루는 각에 따라 명암값이 변하기 때문입니다. 하지만 이 가정이 없이는 알고리즘을 설계하기가 매우 어렵습니다. 다행인 점은 실제 실험 결과를 살펴보면 이 가정이 받아들일 수 있는 정도의 오차 이내에 들어 맞는다은 사실을 확인할 수 있습니다. 이러한 이유로 ① 전제 조건인
밝기 항상성이라는 전제 조건을 사용합니다.
- 다시 한번 식으로 나타내면 다음과 같습니다. 함수 식으로 나타내기 위하여 \(f\)로 사용하겠습니다.
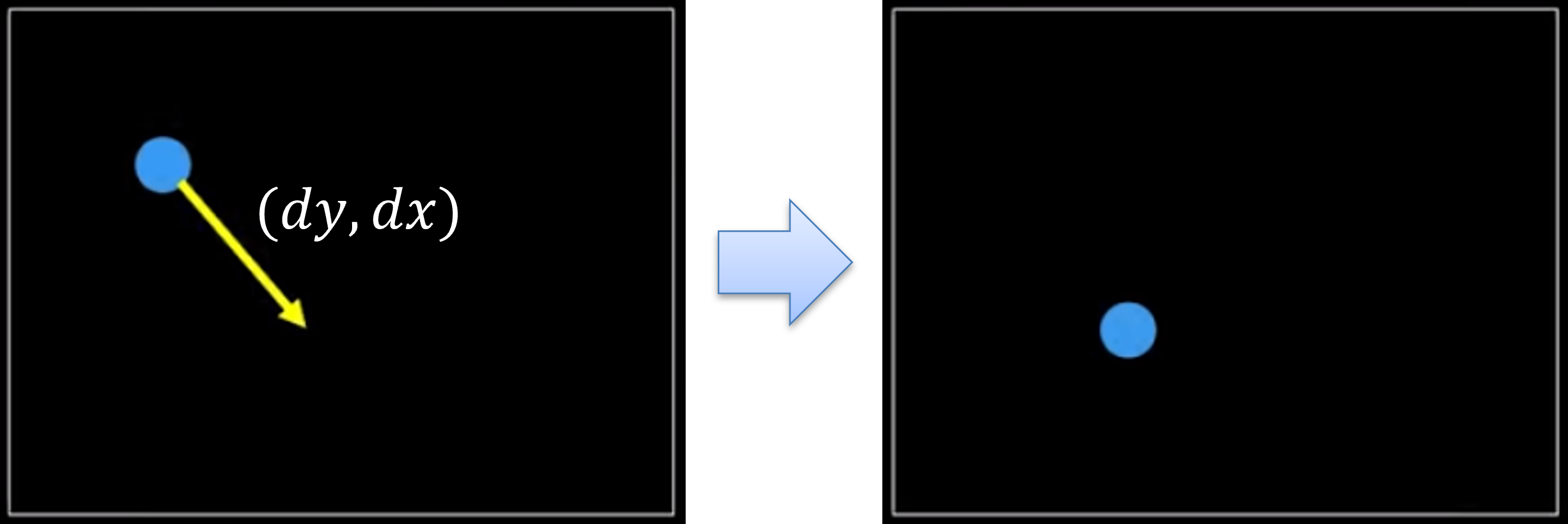
- \[f(y, x, t) = f(y + dy, x + dx, t + dt)\]
- \[f(y + dy, x + dx, t + dt) - f(y, x, t) = 0\]
- 위 식에서 ② 전제 조건인
small motion을 적용해 보겠습니다. 즉, \(dy, dx\) 가 굉장히 작은 값을 가진다는 것이small motion을 의미합니다. 인접한 두 영상의 시간 차이 \(dt\)가 충분히 작아서small motion조건을 만족한다면 테일러 급수에 따라 다음과 같이 식을 정리할 수 있습니다.
- \[f(y + dy, x + dx, t + dt) = f(y, x, t) + \frac{\partial f}{\partial y}dy + \frac{\partial f}{\partial x}dx + \frac{\partial f}{\partial t}dt + \cdots\]
- 테일러 급수의 생략된 항은 2차 이상의 항이며 이 값은 1차 항에 비하여 영향이 작기 때문에 생략하였습니다.
- 위 식에서 \(dt\)는 fps에 따라 다르며 초당 30 프레임을 획득하는 fps=30인 비디오 영상의 경우 \(dt = 1/30\)이 됩니다. \(dt\)가 충분히 작다는 말은 시간이 짧아야 한다는 뜻이 아니라 물체 이동 거리를 몇 개 픽셀 정도로 작게 유지할 수 있을 정도의 시간을 뜻합니다. 즉, 이동 거리량이 작아야 된다는 뜻입니다.
- 따라서 \(dt\)가 작다는 가정에 따라, 물체의 움직임을 나타내는 \(dy, dx\)도 작으므로 2차 이상의 항을 무시해도 큰 오차가 발생하지는 않습니다.
밝기 항상성 가정에 따르면 \(dt\)라는 시간 동안 \((dy, dx)\)만큼 움직여 형성된 새로운 점의 \(f(y + dy, x + dx, t + dt)\)는 원래 점의 \(f(y, x, t)\)와 같습니다. 따라서 테일러 급수에 해당하는 term을밝기 항상성가정에 의해 0으로 둘 수 있습니다.
- \[\frac{\partial f}{\partial y}dy + \frac{\partial f}{\partial x}dx + \frac{\partial f}{\partial t}dt = 0\]
- 위 식에서 양변을 \(dt\)로 나누어 보겠습니다.
- \[\frac{\partial f}{\partial y}\frac{dy}{dt} + \frac{\partial f}{\partial x}\frac{dx}{dt} + \frac{\partial f}{\partial t} = 0\]
- 위 식에서 \(\frac{\partial f}{\partial y}, \frac{\partial f}{\partial x}, \frac{\partial f}{\partial t}\)의 의미를 살펴보겠습니다.
- 이 값들은 영상 \(f(y, x, t)\)를 각각 매개변수 \(y, x, t\)로 편미분한 값입니다.
- 먼저 \(\biggl( \frac{\partial f}{\partial y}, \frac{\partial f}{\partial x} \biggr)\)는
gradient vector를 의미합니다. 반면 \(\frac{dy}{dt}, \frac{dx}{dt}\)는 시간 \(dt\) 동안 \(y\)와 \(x\) 방향으로의 이동량을 뜻하므로 motion vector에 해당합니다. 따라서 \(\frac{dy}{dt} = v, \frac{dx}{dt} = u\)를 뜻하며 최종적으로 다음과 같이 정리할 수 있습니다.
- \[\frac{\partial f}{\partial y}v + \frac{\partial f}{\partial x}u + \frac{\partial f}{\partial t} = 0\]
-
이 식은 미분 방정식으로
optical flow constraint equation또는gradient constraint equation이라고 부릅니다. 미분을 이용하는 대부분의 optical flow 추정 알고리즘은 이 방정식을 풀어 motion vector를 구합니다. 앞으로 살펴 볼 Lucas-Kanade 알고리즘과 Horn-Schunck 알고리즘이 이 식을 사용합니다. - 이 식을 살펴보면 gradient를 구성하는 세 개의 값 \(\frac{\partial f}{\partial y}, \frac{\partial f}{\partial y}, \frac{\partial f}{\partial t}\)를 모두 구했다 하더라도 \(v, u\) 즉, motion vector를 유일한 값으로 결정할 수 없음을 알 수 있습니다. 방정식은 하나인데 구해야 할 값은 \(v, u\) 두개 이기 때문입니다.
- 바로 뒤에서 살펴 볼 2가지 알고리즘 (Lucas-Kanade, Horn-Shunck) 각각에서는 조건을 추가하여 방정식의 해를 찾아 motion vector \(v, u\)를 구합니다.
optical flow constraint equation의 의미를 구체적인 예시를 통하여 좀 더 자세하게 알아보도록 하겠습니다. 먼저 위에서 정의한 식만을 이용해서 optical flow를 추정해 보겠습니다.
- 위 이미지에서 편도 함수 값은 다음과 같이 이웃한 점과의 차이로 구한다고 가정해 보겠습니다.
- \[\frac{\partial f}{\partial y} = f(y + 1, x, t) - f(y, x, t)\]
- \[\frac{\partial f}{\partial x} = f(y, x + 1, t) - f(y, x, t)\]
- \[\frac{\partial f}{\partial t} = f(y, x, t + 1) - f(y, x, t)\]
- 위 그림의 초록색 동그리미로 표시한 픽셀의 좌표가 \((5, 3, t)\)이고 이 값에 대하여 편도 함수 값을 계산해 보면 다음과 같습니다.
- \[\frac{\partial f}{\partial y} = f(5 + 1, 3, t) - f(5, 3, t) = 7 - 6 = 1\]
- \[\frac{\partial f}{\partial x} = f(5, 3 + 1, t) - f(5, 3, t) = 5 - 6 = -1\]
- \[\frac{\partial f}{\partial t} = f(5, 3, t + 1) - f(5, 3, t) = 8 - 6 = 2\]
- 계산한 값을 \(\frac{\partial f}{\partial y}v + \frac{\partial f}{\partial x}u + \frac{\partial f}{\partial t} = 0\)에 적용하면 다음과 같은 방정식을 얻습니다.
- \[v - u + 2 = 0\]
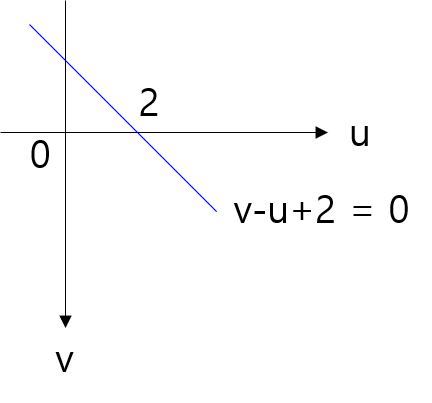
- 구한 식을 그래프로 나타내면 위 그래프와 같습니다. 이 식을 해석해 보면 구하려면 motion vector \((v, u)\)는 이 직선 상에 놓여야 하는데 유일한 점으로 결정한 수는 없는 상태입니다. 따라서 앞으로 알아볼 optical flow 추정 방법을 통하여
밝기 항상성이외에 또 다른 가정을 추가하여 유일한 해를 찾아보도록 하곘습니다.
Lucas-Kanade 알고리즘
- 먼저
지역적 방법으로 optical flow의 유일한 해를 찾는 방법으로Lucas-Kanade 알고리즘이 있습니다. 이 알고리즘은 픽셀 \((y, x)\)를 중심으로 하는 윈도우 영역 \(N(y, x)\)의 optical flow는 같다라고 가정합니다. 따라서Lucas-Kanade 알고리즘의 전제조건은 다음 3가지입니다.- ① 밝기 향상성 (brightness constancy)
- ② Frame 간 움직임이 작다.
- ③ 픽셀 \((y, x)\)를 중심으로 하는 윈도우 영역 \(N(y, x)\)의 optical flow는 같다
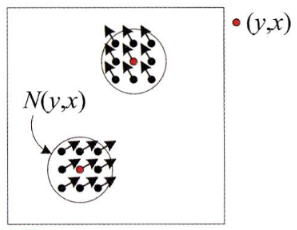
- 이 의미를 그림으로 살펴보면 위와 같습니다. 이웃 영역에 속하는 모든 픽셀 \((y_{i}, x_{i}), i=1, 2, \cdots, n\)은 같은 motion vector \(\vec{v} = (v, u)\)를 가져야 합니다. 여기서 \(n\)은 영역 \(N()\) 에 속하는 픽셀의 갯수로 위 그림에서 \(n = 9\)가 됩니다.
- 물론 이 픽셀은 모두 \(\frac{\partial f}{\partial y}v + \frac{\partial f}{\partial x}u + \frac{\partial f}{\partial t} = 0\)을 만족해야 하며 추가적으로 다음과 같이 식을 정리할 수 있습니다.
- \[\frac{\partial f(y_{i}, x_{i})}{\partial y}v + \frac{\partial f(y_{i}, x_{i})}{\partial x}u + \frac{\partial f(y_{i}, x_{i})}{\partial t} = 0, \ \ (y_{i}, x_{i}) \in N(y, x)\]
- 위 식을 행렬 형태로 바꾸어 표현해 보곘습니다.
- \[A\vec{v}^{T} = b\]
- \[A = \begin{pmatrix} \frac{\partial f(y_{1}, x_{1})}{\partial y} & \frac{\partial f(y_{1}, x_{1})}{\partial x} \\ \cdots & \cdots \\ \frac{\partial f(y_{n}, x_{n})}{\partial y} & \frac{\partial f(y_{n}, x_{n})}{\partial x} \end{pmatrix}\]
- \[\vec{v} = (v, u)\]
- \[b = \begin{pmatrix} -\frac{\partial f(y_{1}, x_{1})}{\partial t} \\ \cdots \\ -\frac{\partial f(y_{n}, x_{n})}{\partial t} \end{pmatrix}\]
- 위 식에서 미지수는 \((v, u)\) 두 개이지만 식은 \(n\)개로 식이 더 많은 상황입니다. 따라서 least square를 이용하여 미지수 \(v, u\)를 구합니다.
- 위 식을 \(A^{T}A\vec{v}^{T} = A^{T}b\)와 같이 바꿔 쓴 후, 아래와 같이 \(\vec{v}\)로 정리합니다.
- \[\vec{v}^{T} = (A^{T}A)^{-1}A^{T}b\]
- 위 식에서 \((A^{T}A)^{-1}\)과 \(A^{T}b\)를 분리하여 생각하면 \((A^{T}A)^{-1}\)은 2X2 행렬이고 \(A^{T}b\)는 2X1 행렬입니다.
- \[\vec{v}^{T} = \begin{pmatrix} v \\ u \end{pmatrix} = (A^{T}A)^{-1}A^{T}b = \begin{pmatrix} \sum_{i=1}^{n} \biggl( \frac{\partial f(y_{i}, x_{i})}{\partial y} \biggr)^{2} & \sum_{i=1}^{n} \frac{\partial f(y_{i}, x_{i})}{\partial y}\frac{\partial f(y_{i}, x_{i})}{\partial x} \\ \sum_{i=1}^{n} \frac{\partial f(y_{i}, x_{i})}{\partial y}\frac{\partial f(y_{i}, x_{i})}{\partial x} & \sum_{i=1}^{n} \biggl( \frac{\partial f(y_{i}, x_{i})}{\partial x} \biggr)^{2} \end{pmatrix}^{-1} \begin{pmatrix} -\sum_{i=1}^{n} \frac{\partial f(y_{i}, x_{i})}{\partial y}\frac{\partial f(y_{i}, x_{i})}{\partial t} \\ -\sum_{i=1}^{n} \frac{\partial f(y_{i}, x_{i})}{\partial x}\frac{\partial f(y_{i}, x_{i})}{\partial t} \end{pmatrix}\]
- 위 식의 첫번째 항은 \(\partial t\)를 포함하지 않으므로 \(t\) 순간의 영상만 있으면 모든 계산이 가능합니다. 두번째 항은 \(t\) 순간과 \(t+1\) 순간의 영상을 둘 다 사용합니다.
- 위 식은 윈도우 영역 \(N()\)에 속한 모든 픽셀을 같은 비중으로 취급합니다. 그런데 윈도우의 중앙에 있는 픽셀 \((y, x)\)에 가깡루수록 큰 비중을 두는 식으로 바꾸면 보다 나은 품질의 motion vector를 구할 수 있습니다.
- \[A^{T} W A v^{T} = A^{T} W b\]
- \[\vec{v}^{T} = (A^{T} W A)^{-1} A^{T} W b\]
- 따라서 중앙 픽셀에 가중치를 주기 위하여 \(W\)를 도입하고 \(W\)는 보통 가우시안을 사용합니다. 따라서 아래와 같이 \(w_{i}\)가 추가된 \(\vec{v}\)를 구할 수 있습니다.
- \[\vec{v}^{T} = \begin{pmatrix} v \\ u \end{pmatrix} = (A^{T}WA)^{-1}A^{T}Wb = \begin{pmatrix} \sum_{i=1}^{n}w_{i} \biggl( \frac{\partial f(y_{i}, x_{i})}{\partial y} \biggr)^{2} & \sum_{i=1}^{n} w_{i} \frac{\partial f(y_{i}, x_{i})}{\partial y}\frac{\partial f(y_{i}, x_{i})}{\partial x} \\ \sum_{i=1}^{n} w_{i} \frac{\partial f(y_{i}, x_{i})}{\partial y}\frac{\partial f(y_{i}, x_{i})}{\partial x} & \sum_{i=1}^{n} w_{i} \biggl( \frac{\partial f(y_{i}, x_{i})}{\partial x} \biggr)^{2} \end{pmatrix}^{-1} \begin{pmatrix} -\sum_{i=1}^{n} w_{i} \frac{\partial f(y_{i}, x_{i})}{\partial y}\frac{\partial f(y_{i}, x_{i})}{\partial t} \\ -\sum_{i=1}^{n} w_{i} \frac{\partial f(y_{i}, x_{i})}{\partial x}\frac{\partial f(y_{i}, x_{i})}{\partial t} \end{pmatrix}\]
- 위 식이 optical flow를 추정하는
Lucas-Kanade 알고리즘의 핵심입니다.
- 이러한 이유로
Lucas-Kanadeoptical flow 방식은 다음과 같은 장단점을 가집니다. - 장점 : Lucas-Kanade algorithm은 sparse optical flow에 속하여 코너와 같이 두드러지는 특징 점을 사용하여 optical flow를 추적하기 때문에 연산량이 적다는 장점이 있다.
- 단점 : 좁은 지역의 윈도우를 사용하기 때문에 이 윈도우보다 큰 움직임이 발생하였을 경우 움직임을 계산하지 못한다는 단점이 있고, 특징 점을 사용하여 optical flow를 얻기 때문에 dense optical flow에 비해서 정확도가 낮은 편이다.
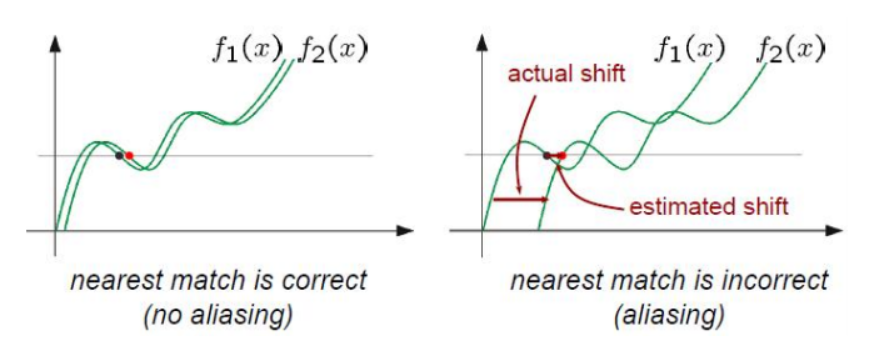
Luckas-Kanade알고리즘은 위와 같은 장단점을 가집니다. 단점을 통해 알 수 있듯이 motion vector를 가지는 작은 window에 대하여 적용하는 알고리즘이므로 만일 영상내의 object가 큰 움직임의 motion vector를 가진다면aliasing이 발생한다.
- 또한
지역적 방법의 옵티컬 플로우를 찾는 방식의 주요한 문제점 중 하나는aperture problem이라고 불리는 문제입니다.aperture는 작은 구멍이라는 뜻을 가지는 단어입니다. 아래 그림을 살펴보겠습니다.

- 위 그림의 왼쪽과 같이 어떤 edge 성분이 왼쪽 → 오른쪽으로 이동했다고 가정하겠습니다. 이 때, edge 전체의 움직임을 보고 판단하였을 떄, edge가 오른쪽으로 이동했다고 판단합니다.
- 반면 구멍 안의 edge 성분의 이동을 살펴보면 오른쪽 상단으로 이동한 것으로 판단됩니다.

- 반면 위 그림처럼 투명하게 살펴보았을 경우 edge 성분이 오른쪽으로 이동한 것을 알 수 있습니다. 이와 같이 edge를 투명하게 본다는 것은 지역적 방법이 아닌
전역적 방법을 뜻합니다. - 이처럼 지역적 방법에는
aperture problem으로 인하여 옵티컬 플로우 추정이 불확실하게 나타날 수 있습니다.
- 이와 같은 문제를 해결하기 위하여
Pyramid 방식의Lucas-Kanade알고리즘이 도입되었습니다.
추가적으로 살펴본 Lucas-Kanade method with pyramids 방법에 대하여 장단점을 정리하면 다음과 같습니다.
원리:Lukas-Kanade방법에서 큰 움직임을 계산하지 못하는 단점을 개선하기 위해 고안되어진 방법으로 원본 영상으로부터 영상 스케일에 따른 영상 피라미드를 구성한다.장점: 영상 피라미드의 상위계층에서 하위계층으로 추적하면서 다양한 스케일의 이미지를 탐색하기 때문에 커다란 움직임도 찾아낼 수 있다.단점: 몇 개의 특징점을 추출하고 그 특징 점에 대하여 optical flow를 얻으므로 dense optical flow algorithm 보다는 정확성이 떨어진다는 단점이 있다.
Horn-Schunck 알고리즘
Lucas-Kanade 알고리즘은 윈도우 영역 내부를 고려하는 지역적 방식을 사용하였습니다. 반면Horn-Schunk 알고리즘은 영상 전체를 한꺼번에 고려하는전역적 방식을 사용합니다.Horn-Shunk 알고리즘에서 전역적 방식을 사용하기 위해서 한가지 전제 조건이 추가로 필요합니다.optical flow는 균일해야 한다.입니다. 따라서 Horn-Schunk 알고리즘은 다음 3가지 전제 조건이 필요합니다.- ① 밝기 향상성 (brightness constancy)
- ② Frame 간 움직임이 작다.
- ③ optical flow는 균일해야 한다.
- optical flow 맵의
균일한 정도는 아래 식을 사용하여 추정합니다.
- \[\Vert \nabla v \Vert^{2} + \Vert \nabla u \Vert^{2} = \biggl( \frac{\partial v}{\partial y} \biggr)^{2} + \biggl( \frac{\partial v}{\partial x} \biggr)^{2} + \biggl( \frac{\partial u}{\partial y} \biggr)^{2} + \biggl( \frac{\partial u}{\partial x} \biggr)^{2}\]
- 위 식에서 \(\nabla v = \biggl(\frac{\partial v}{\partial y}, \frac{\partial v}{\partial x} \biggr)\)로 \(v\)를 \(y\)와 \(x\) 방향으로 미분한 gradient 입니다. \(\nabla u\)도 동일하게 정의됩니다.
- 만약 gradient가 작다면 이 뜻은 이웃한 화소의 \(v\)와 \(u\)가 비슷하다는 뜻입니다.
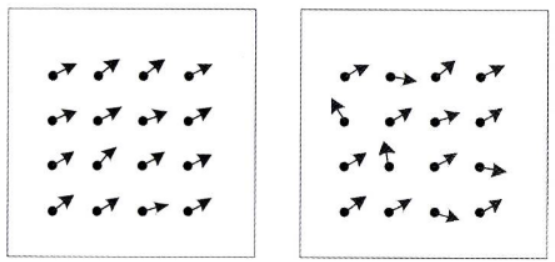
- 위 두 optical flow 맵을 살펴보면 왼쪽은 optical flow가 균일합니다. 반면 오른쪽은 optical flow가 균일하지 않습니다.
- gradient가 작다면 왼쪽 그림과 같이 optical flow가 균일하다고 할 수 있습니다. 반면 오른쪽 그림과 같이 optical flow가 균일하지 않다면 벡터의 방향이 크게 변하는 지점에서 gradient 값일 클 것입니다.
- 따라서 \(\Vert \nabla v \Vert^{2} + \Vert \nabla u \Vert^{2}\)를 작게하여 gradient 값이 작도록 해야 합니다.
- 뿐만 아니라 Horn-Schunk 알고리즘은 기존의 optical flow의
밝기 항상성조건식인 \(\frac{\partial f}{\partial y}v + \frac{\partial f}{\partial x}u + \frac{\partial f}{\partial t} = 0\) 식도 만족해야 합니다. 정리하면 다음과 같습니다.
- \[\frac{\partial f}{\partial y}v + \frac{\partial f}{\partial x}u + \frac{\partial f}{\partial t} = 0\]
- \[\text{Minimize } \Vert \nabla v \Vert^{2} + \Vert \nabla u \Vert^{2} = \biggl( \frac{\partial v}{\partial y} \biggr)^{2} + \biggl( \frac{\partial v}{\partial x} \biggr)^{2} + \biggl( \frac{\partial u}{\partial y} \biggr)^{2} + \biggl( \frac{\partial u}{\partial x} \biggr)^{2}\]
- Horm-Schunk 알고리즘은 영상 전체에 대해 이들 값을 최소로 하는 해를 찾는 전략을 취합니다.
- 이러한 전략을 반영한 것이 다음 식입니다.
- \[E = \int\int \biggl(\biggl(\frac{\partial f(y, x)}{\partial y}v + \frac{\partial f(y, x)}{\partial x}u + \frac{\partial f(y, x)}{\partial t} \biggr)^{2} + \alpha^{2}( \Vert \nabla v(y, x) \Vert^{2} + \Vert \nabla u(y, x) \Vert^{2} ) \biggr)dydx\]
- 위 식에서 적분 식 속에 있는 첫번째 항은 optical flow의
밝기 항상성조건식이고 두번째 항은전역적 방식을 위한 식입니다. 이 때, \(\alpha\)는 어느 것에 더 큰 비중을 둘 것인 지 결정해 주는 가중치입니다. 이와 같은 두번째 항을regularization term이라고 합니다. 이와 같이 정규화 항을 이용하여균일한 optical flow의 해를 구하는 방법을 정규화 기법 이라고 합니다.
- 위 식은 Error이므로 Error를 최소로 하는 optical flow 맵, 즉 모든 픽셀 \((y, x)\)에 대한 $$ v(y, x)
- 이러한 이유로
Horn-Shunkoptical flow 방식은 다음과 같은 장단점을 가집니다. - 장점 : 영상 모든 픽셀을 탐색하는 알고리즘으로써 다른 알고리즘보다 정확하다는 장점이 있습니다.
- 단점 : 대표적인 dense optical flow 로써 영상 내부의 모든 픽셀의 속도를 계산하므로 느리다는 단점이 있습니다.
Optical flow 알고리즘 성능 동향
- 지금까지 설명한 바와 같이
Lucas-Kanade (LK)알고리즘은 지역적이로,Horn-Schunck (HS)알고리즘은 전역적입니다. 이러한 특성 때문에LK는 optical flow 값이 정해지지 않는 영역이 군데군데 발생할 수 있는데, 특히 명암 변화가 적은 곳에서 잘 나타납니다. 반대로HS는 반복하는 과정에서 명암 변화가 적은 영역에도 정보가 파급되므로 모든 픽셀이 motion vector를 가지는 밀집된 optical flow 맵을 생성해 줍니다. 이는 일종의 interpolation 효과로 볼 수 있습니다. LK나HS모두 미분으로 얻은 도함수를 기반으로 작동하는 optical flow 알고리즘입니다. 이와 같은 알고리즘을미분 기반 방법이라고 합니다.- 미분 기반 방법 이외에도 optical flow를 추정하는 다양한 방법들이 있습니다. 예를 들어 블록 매칭 방법, 에너지 방법, 위상 방법 등이 있는데, Performance of optical flow techniques (Barron94] J. L. Barron, D. J. Fleet, and S. S. Beauchemin, International Journal of Computer Vision, Vol. 12,No .l, pp.43-77.)에 따르면 미분을 사용하는 Luckas-Kanade 알고리즘이 가장 우수하다는 결론을 이끌어 냈습니다.
- 2000년 이후에 발표된 방법까지 포함하여 가장 성능이 좋다고 알려진
"Lucas/Kanade meets Horn/Schunck : combining local and global optic flow methods"(Andres Bruhn, Joachim Weickert, and Christoph Schnorr, International Journal of Computer Vision, Vol.61, No.3)이 가장 우수하다는 결론을 도출하였습니다.
- 실질적으로 optical flow를 활용할 때에는 정확도와 효율성을 고려하여
Luckas-Kanade with Pyramid알고리즘을 사용하기를 추천드립니다.
Optical flow의 활용
- optical flow 알고리즘을 이용하여 다음과 같은 optical flow 맵을 얻게 되면 물체 추적이나 인식같은 컴퓨터 비전 처리에 필요한 feature들을 얻을 수 있습니다.
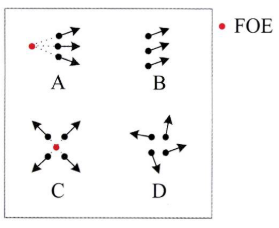
- 위 그림은 optical flow로 부터 얻은 motion vector의 형상을 간단하게 표현해 보았습니다. 실제로 motion vector는 알고리즘의 한계와 다양한 노이즈로 인하여 많은 오차를 포함하기 때문에 위 그림과 같이 깔끔하게 나타나지는 않습니다.
A와 같은 형태의 motion vector를 가지게 되면 물체가 오른쪽으로 이동함과 동시에 카메라에 가까워지는 상황임을 추정할 수 있습니다. 이 때, motion vector가 모이는 한 점을FOE (Factor of Expansion)이라고 합니다.B는 카메라와 일정한 거리를 유지하면서 오른쪽 위로 이동하는 물체를 나타냅니다.C는 물체가 광축 방향을 따라 카메라에 다가오는 상황을 나타냅니다.D는 제자리에서 회전하는 물체를 나타냅니다.
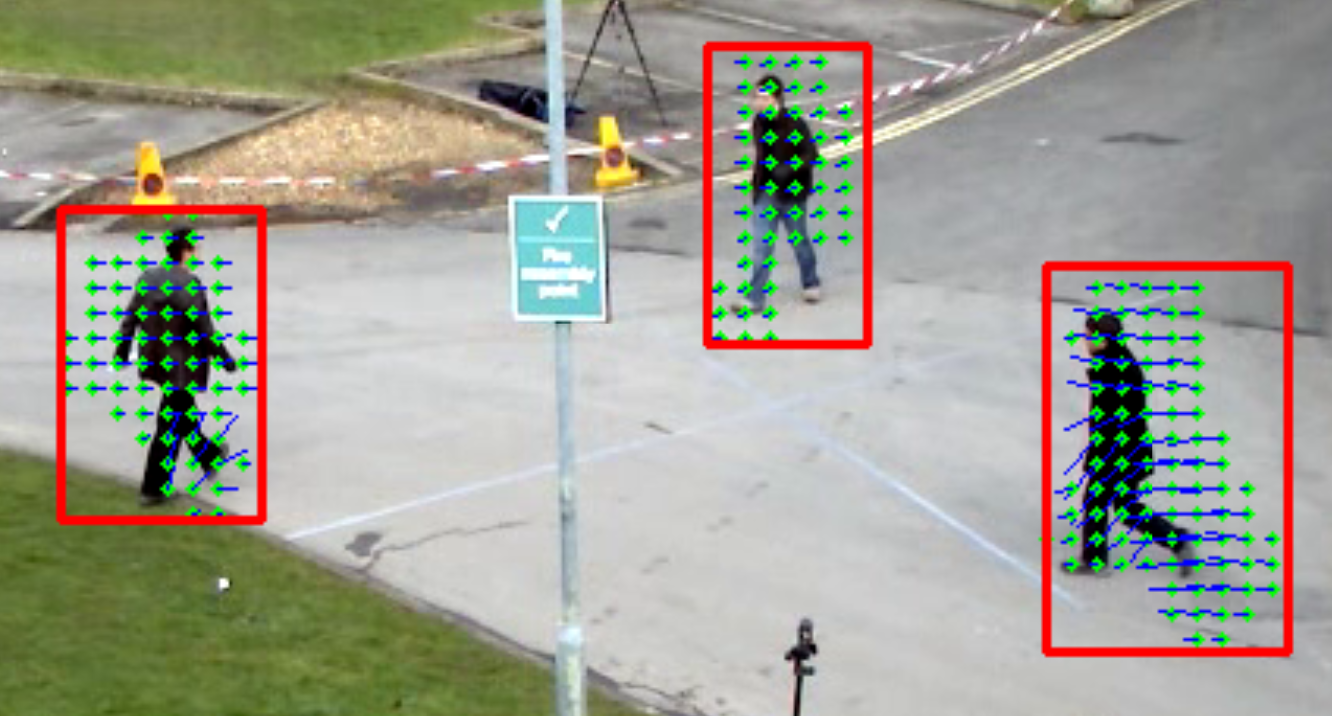
- 위 그림에서는 optical flow를 통하여 객체를 인식하고 각 객체의 motion vector를 시각화 하여 나타낸 것입니다. motion vector의 방향을 통하여 인식한 객체의 이동 방향을 추정할 수 있습니다.
- 이 예제는 글 아래에서 OpenCV를 통하여 살펴볼 예정입니다.
- 위 예시와 같이 motion vector를 이용하여 주변 물체의 상태를 확인할 수 있을 뿐 아니라, 카메라가 고정되어 있을 때, 로봇이나 자동차의 현재 자신의 위치인
ego motion을 추정하는 문제에도 활용할 수 있습니다. - 뿐만 아니라
motion vector를 feature로 이용하고 이 feature들과 SVM과 같은 classifier 이용하여 다양한 분류 문제에도 활용할 수 있습니다.
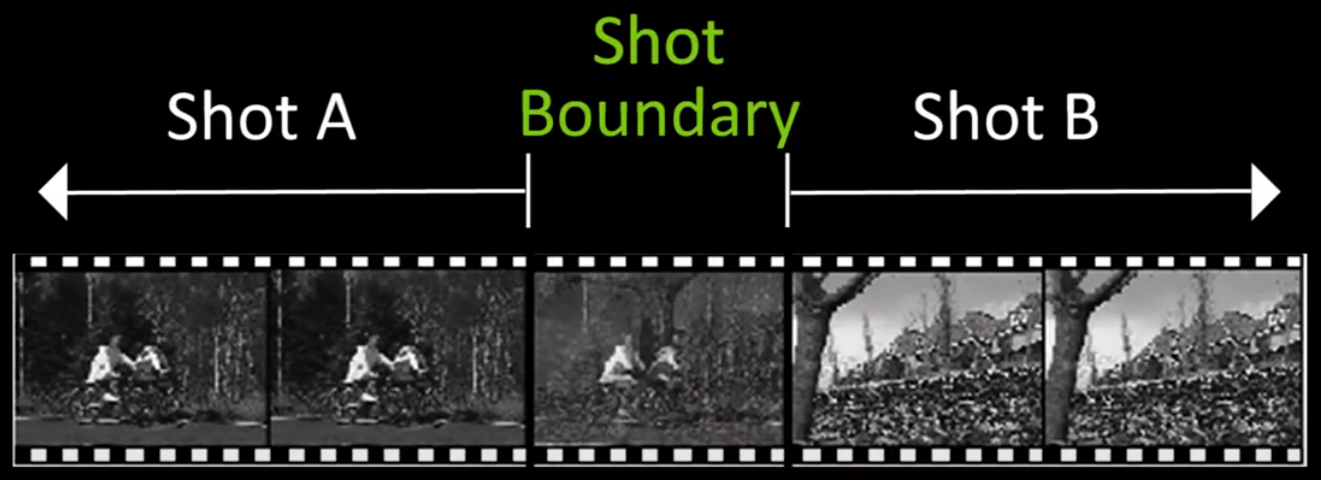
- 위 그림과 같이 비디오에서
Shout boundary detection의 용도로도 옵티컬 플로우를 사용할 수 있습니다. 아래 그림과 같이 같은 비디오에서는 옵티컬 플로우 추정이 가능하므로 영상이 완전히 바뀌게 되면 옵티컬 플로우를 추정할 수 없게 되므로 영상이 바뀐 시점을 확인할 수 있습니다.
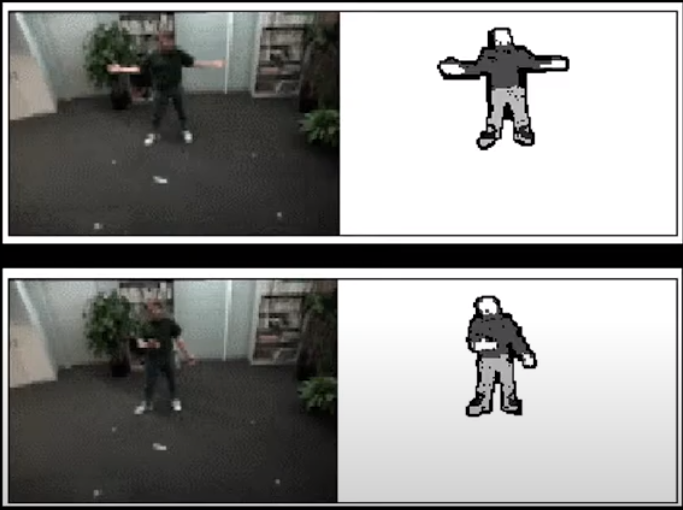
- 또 다른 사용 방법으로 배경을 제거하는 방법이 있습니다. 움직이는 물체의 옵티컬 플로우를 추정하면 물체와 배경을 구분할 수 있으므로 위 그림과 같이 사용할 수 있습니다.
- 반대로 말하면 움직이는 물체의 Motion만을 분리 즉,
Motion SegmentationTask에도 사용할 수 있습니다.
OpenCV를 이용한 Optical Flow 예제
딥러닝을 이용한 Optical Flow 구하기
- 지금까지 살펴본
Lucas-Kanade,Horn-Schunck과 같은 옵티컬 플로우를 구하는 알고리즘은 딥러닝과 무관하게 사용가능한 고전적인 컴퓨터 비전 방법에 해당합니다. 현재까지도 앞에서 다룬 방식의 옵티컬 플로우가 오랜 시간 동안 최적화가 잘 되어 있기 때문에, 효율적으로 잘 사용되고 있습니다. - 최근에는 컴퓨터 비전에 해당하는 대부분의 Task들을 딥러닝을 통해 해결하고자 하며 옵티컬 플로우 또한 2015년의
FlowNet을 시작으로 다양한 모델이 나타나기 시작하였습니다. - 이번 글에서 모든 딥러닝 모델을 다루기는 글이 길어지므로 딥러닝 모델과 관련된 글은 별도로 다루겠습니다. 아래 링크에서 레퍼런스가 되는 옵티컬 플로우 목적의 딥러닝 모델의 내용을 확인하실 수 있습니다.