ORB (Oriented FAST and Rotated BRIEF)
2021, Jan 25
- 논문 : https://www.gwylab.com/download/ORB_2012.pdf
- 참조 : https://medium.com/data-breach/introduction-to-orb-oriented-fast-and-rotated-brief-4220e8ec40cf
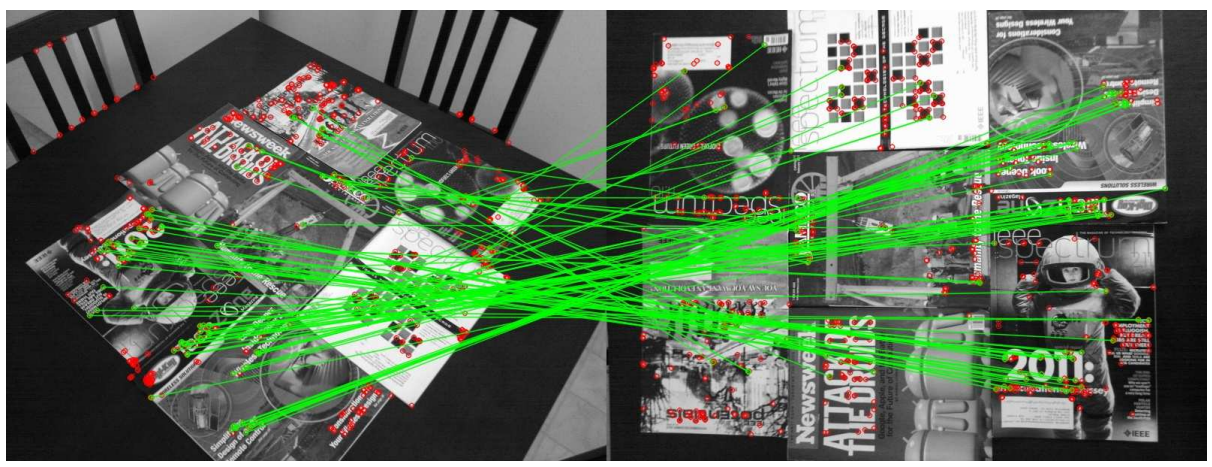
- 아래는 동영상 파일을 읽어서
ORB를 적용한 후 시각화한 예시 코드 입니다.
# Open the video
cap = cv2.VideoCapture('./test.mp4')
# Read the first frame
ret, prev_frame = cap.read()
H, W = prev_frame.shape[0], prev_frame.shape[1]
prev_frame = cv2.resize(prev_frame, (W//2, H//2))
# Convert the first frame to grayscale
prev_frame_gray = cv2.cvtColor(prev_frame, cv2.COLOR_BGR2GRAY)
# Initialize the ORB detector
orb = cv2.ORB_create(nfeatures=200)
# Create a BFMatcher object
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
paused = False
num_points = 50
while True:
if not paused:
# Read the next frame
ret, curr_frame = cap.read()
if not ret:
break # Break the loop if there are no more frames
# Convert current frame to grayscale
curr_frame = cv2.resize(curr_frame, (W//2, H//2))
curr_frame_gray = cv2.cvtColor(curr_frame, cv2.COLOR_BGR2GRAY)
# Detect keypoints and compute descriptors for both frames
keypoints_prev, descriptors_prev = orb.detectAndCompute(prev_frame_gray, None)
keypoints_curr, descriptors_curr = orb.detectAndCompute(curr_frame_gray, None)
if descriptors_prev is None or descriptors_curr is None:
# Prepare for the next iteration
prev_frame = curr_frame
prev_frame_gray = curr_frame_gray
continue
# Match descriptors
matches = bf.match(descriptors_prev, descriptors_curr)
# Sort them in the order of their distance
matches = sorted(matches, key=lambda x:x.distance)
# Draw first 10 matches
matched_image = cv2.drawMatches(prev_frame, keypoints_prev, curr_frame, keypoints_curr, matches[:num_points], None, flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS)
# Display the matched image
cv2.imshow('Matched Features', matched_image)
key = cv2.waitKey(30) & 0xFF
if key == ord('q'): # Break the loop when 'q' is pressed
break
elif key == ord('p'):
paused = not paused # Toggle pause
# Prepare for the next iteration
prev_frame = curr_frame
prev_frame_gray = curr_frame_gray
# Release the video capture object and close all OpenCV windows
cap.release()
cv2.destroyAllWindows()