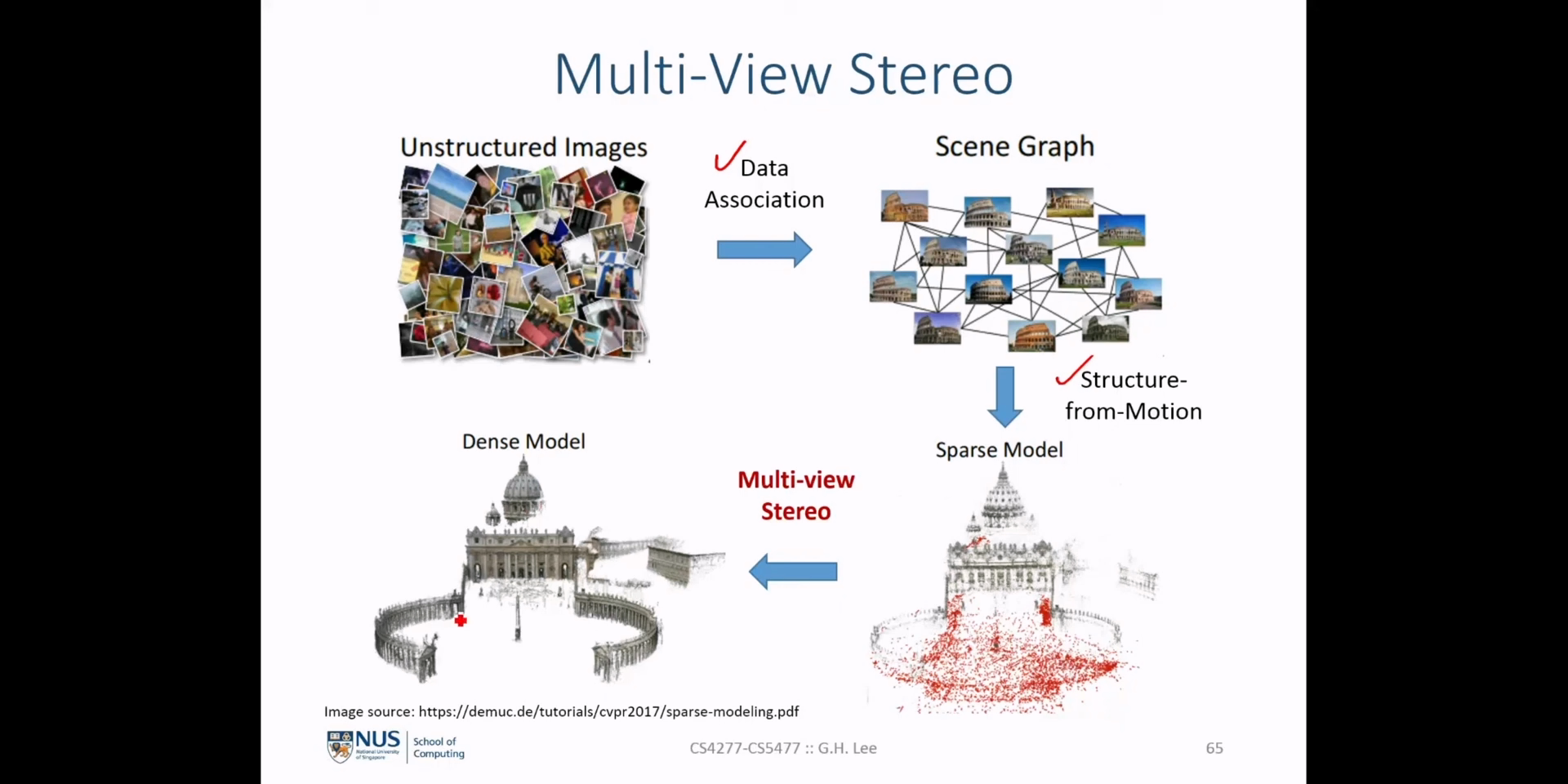
(멀티플 뷰 지오메트리) Lecture 11. Two-view and multi-view stereo
2022, Apr 20
- 참조 : https://youtu.be/OpZs7kfjFPA?list=PLxg0CGqViygP47ERvqHw_v7FVnUovJeaz
- 참조 : https://youtu.be/N_iECTqZtQQ?list=PLxg0CGqViygP47ERvqHw_v7FVnUovJeaz
- 참조 : https://youtu.be/hfQR7X8eH9s?list=PLxg0CGqViygP47ERvqHw_v7FVnUovJeaz
- 참조 : https://youtu.be/YgOC9DjHyJs?list=PLxg0CGqViygP47ERvqHw_v7FVnUovJeaz
- 참조 : Multiple View Geometry in Computer Vision

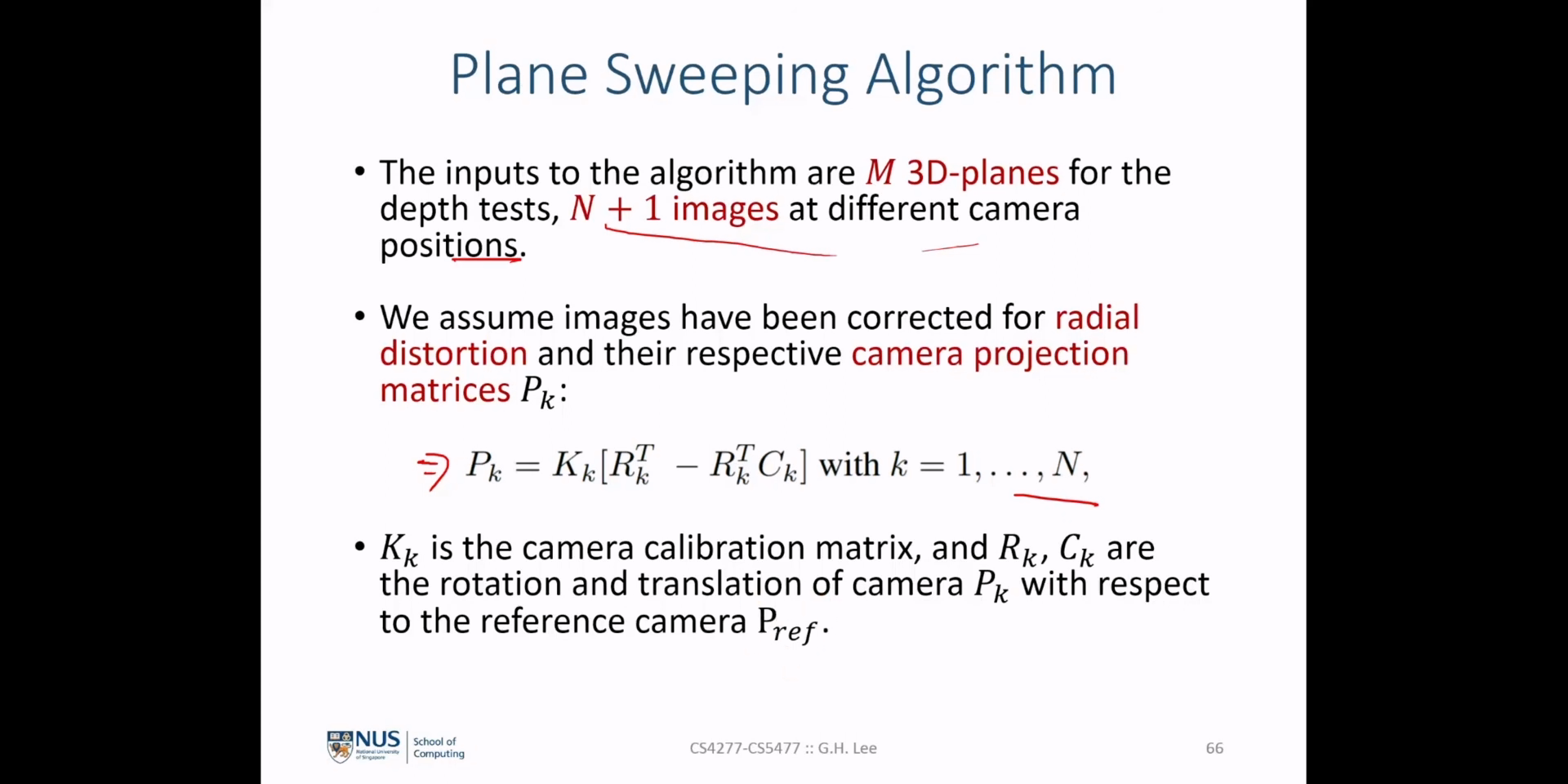
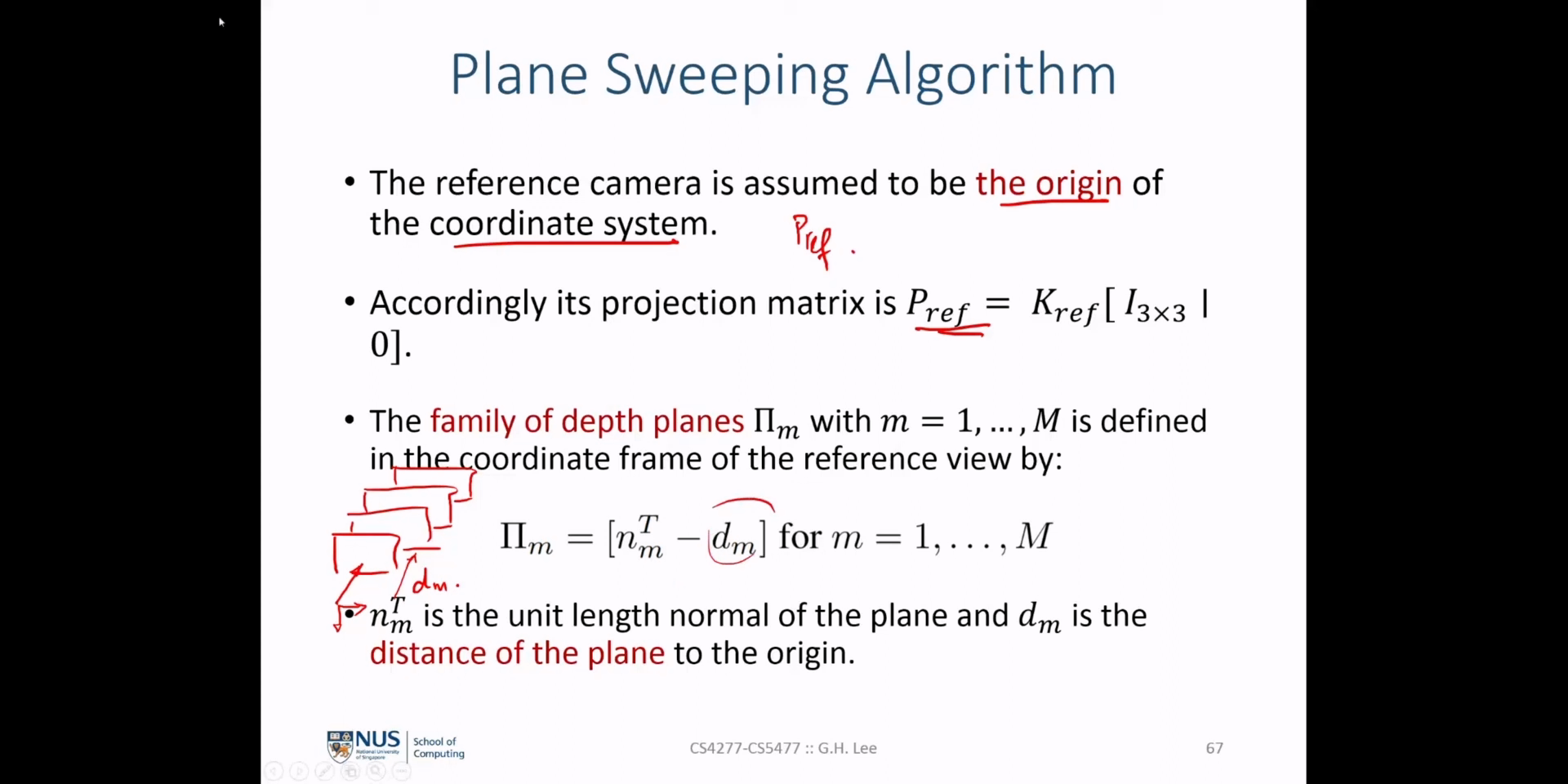
- \[\text{Reference Camera Projection Matrix: } P_{\text{ref}} = K_{text{ref}}[I \vert 0]\]
- \[\text{Camera k Projection Matrix: } P_{k} = K_{k}[R_{k}^{T} \vert -R_{k}^{T}C_{k}]\]
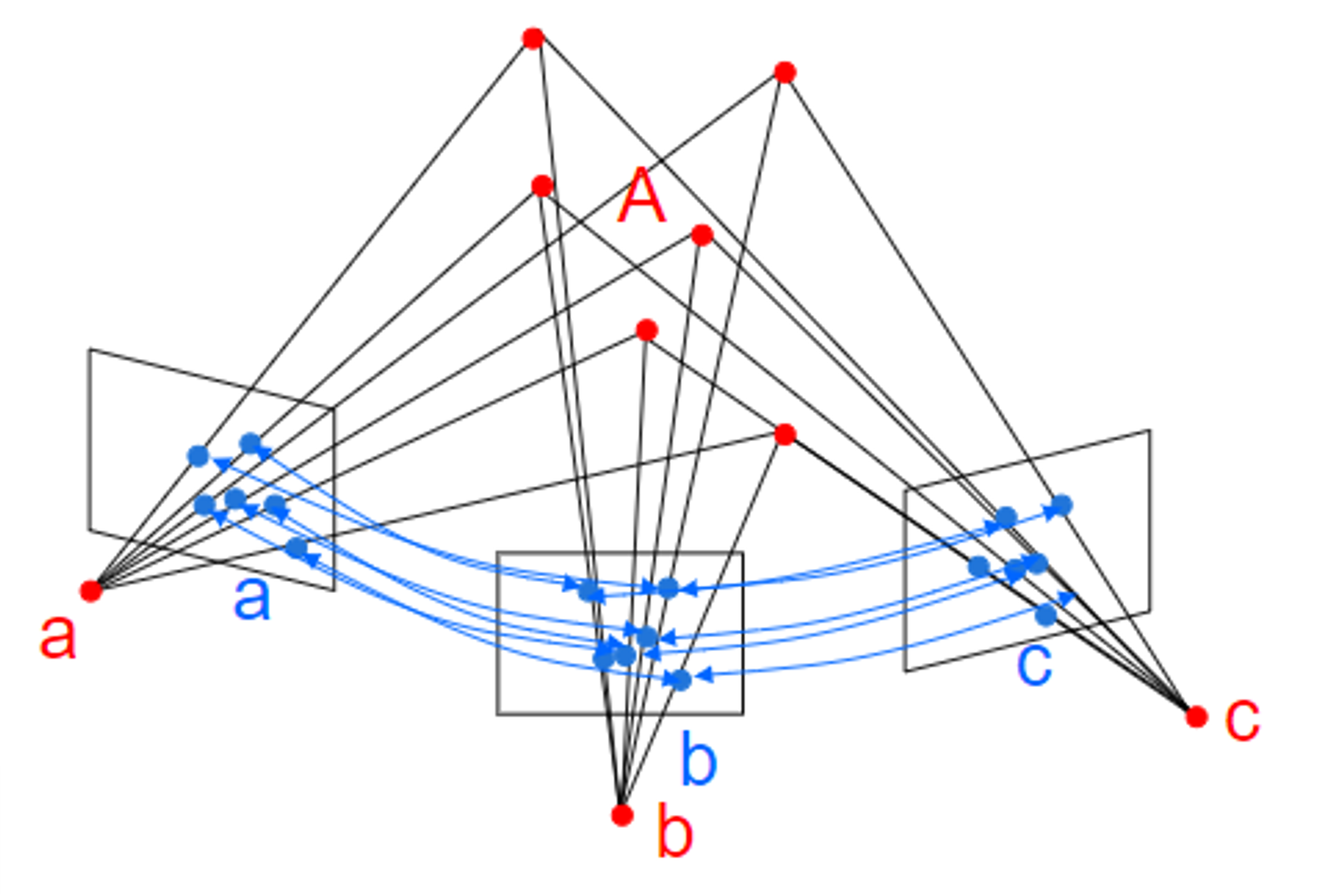
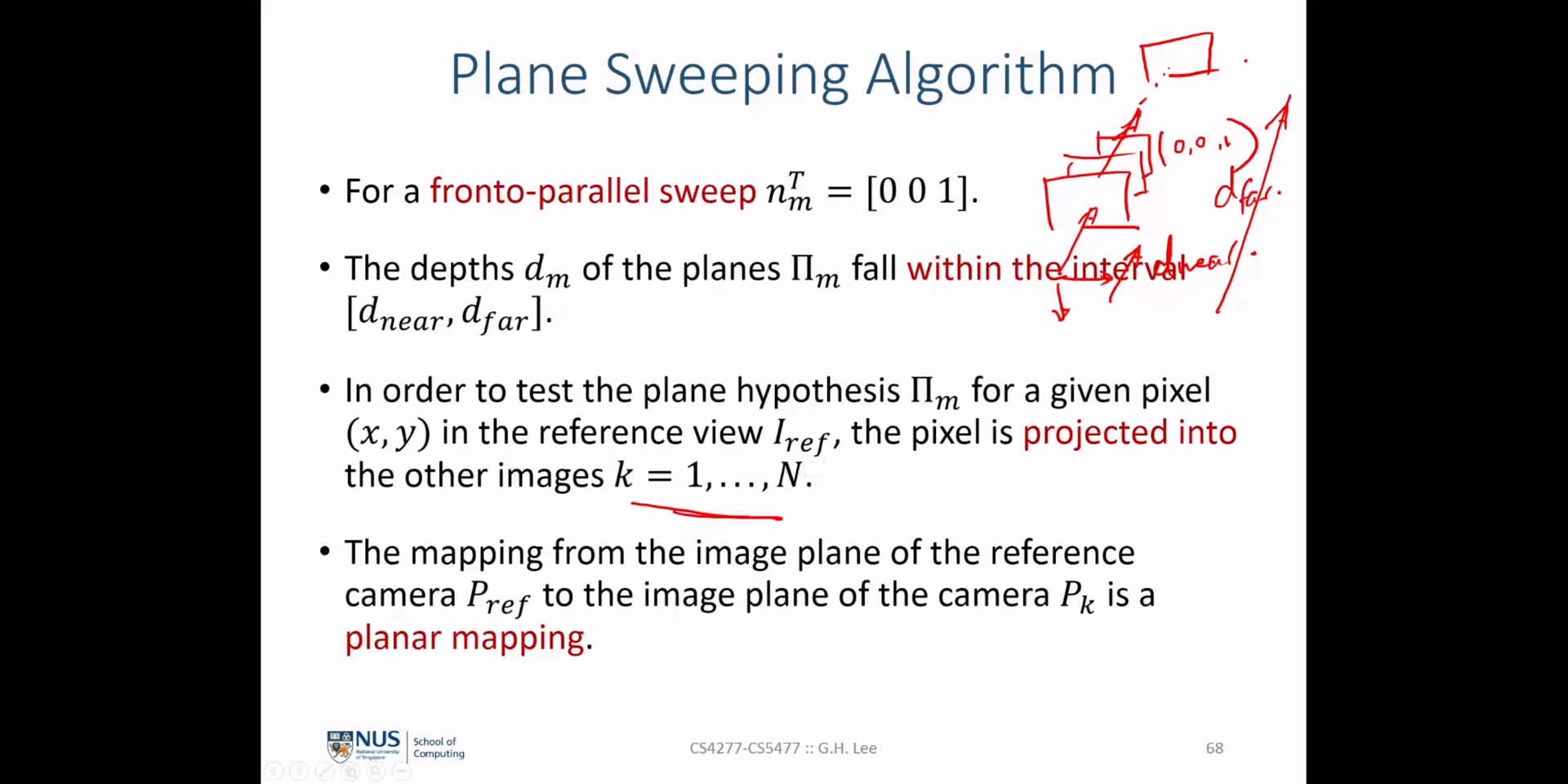
reference camera의image plane으로 부터 카메라 \(k\) 의image plane으로 매핑하는homography를 구해보도록 하겠습니다.reference camera image plane상의 임의의 점을 \(x_{\text{ref}}\) 라고 하고 이에 대응되는 \(k\) 카메라의image plane상의 점을 \(x_{k}\) 라고 하겠습니다.
- \[X \text{: A point on the } \Pi_{m} \text{ plane in homogeneous coordinates.}\]
- \[n_{m}^{T}X - d_{m} = 0\]
- Point \(X\) 를 \(x_{\text{ref}}\) 와 \(x_{k}\) 로 투영하면 다음과 같습니다.
- \[\text{Reference Camera: } x_{\text{ref}} = P_{\text{ref}} X = K_{\text{ref}} X\]
- \[\text{Camera K: } x_{k} = P_{k}X = K_{k}(R_{k}^{T}X - R_{k}^{T}C_{k})\]
- 위 \(x_{\text{ref}}, x_{k}\) 식을 변형하면 다음과 같습니다.
- \[X = K_{\text{ref}}^{-1} x_{\text{ref}}\]
- \[n_{m}^{T}X = d_{m}\]
- \[n_{m}^{T}K_{\text{ref}}^{-1} x_{\text{ref}} = d_{m}\]
- \[\frac{n_{m}^{T}K_{\text{ref}}^{-1} x_{\text{ref}}}{d_{m}} = 1 \text{ : This term will be used below.}\]
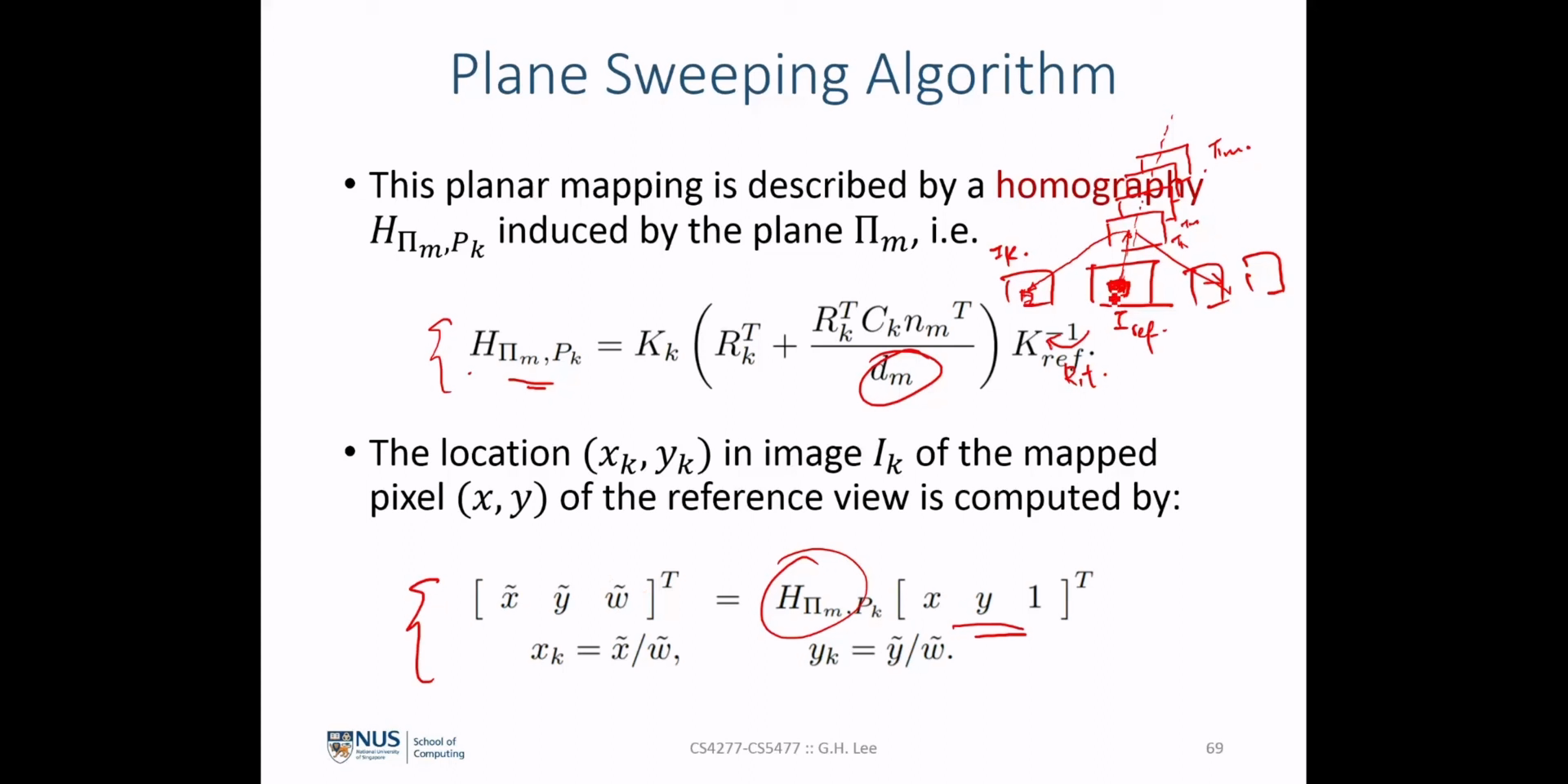
- \[\begin{align} \color{red}{x_{k}} &= K_{k}(R_{k}^{T}K_{\text{ref}}^{-1}x_{\text{ref}} - R_{k}^{T}C_{k}) \\ &= K_{k}R_{k}^{T}K_{\text{ref}}^{-1}x_{\text{ref}} - K_{k}R_{k}^{T}C_{k} \\ &= K_{k}R_{k}^{T}K_{\text{ref}}^{-1}x_{\text{ref}} - K_{k}R_{k}^{T}C_{k} \cdot \frac{n_{m}^{T}K_{\text{ref}}^{-1} x_{\text{ref}}}{d_{m}} \quad (\because \frac{n_{m}^{T}K_{\text{ref}}^{-1} x_{\text{ref}}}{d_{m}} = 1) \\ &= \color{blue}{K_{k}\left( R_{k}^{T} + \frac{R_{k}^{T}C_{k}n_{m}}{d_{m}} \right)K_{\text{ref}}^{-1}} \color{green}{x_{\text{ref}}} \end{align}\]
- 즉, \(x_{\text{ref}}\) 를 \(x_{k}\) 로 변환하는
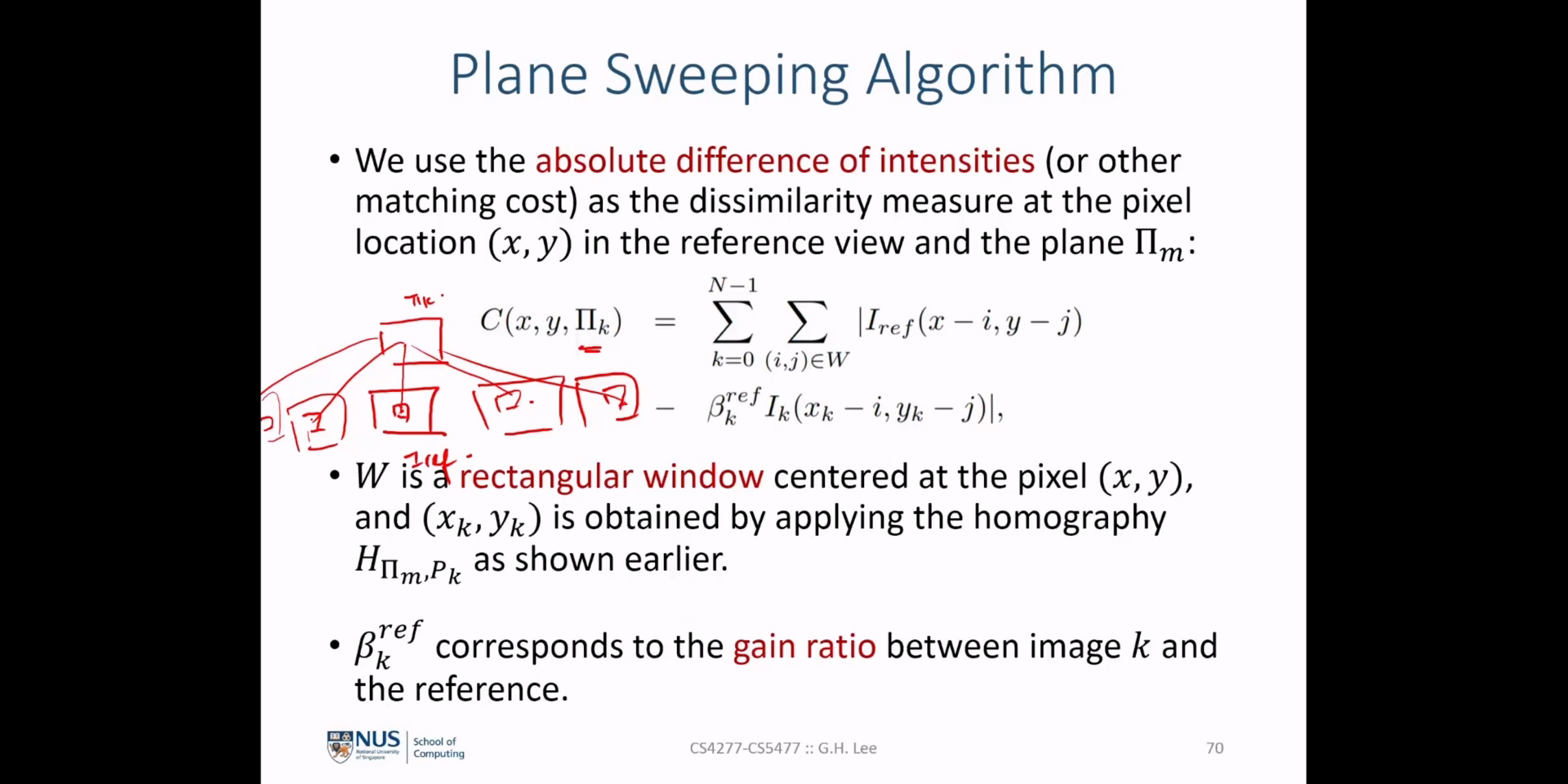
Homography인 \(H_{\Pi_m, P_k}\) 는 위 파란색 식으로 정의될 수 있습니다.
- \[H_{\Pi_m, P_k} = K_{k}\left( R_{k}^{T} + \frac{R_{k}^{T}C_{k}n_{m}}{d_{m}} \right)K_{\text{ref}}^{-1}\]