(멀티플 뷰 지오메트리) Lecture 6. Single view metrology
2022, Apr 20
- 참조 : https://youtu.be/D6Pm5id_LK4?list=PLxg0CGqViygP47ERvqHw_v7FVnUovJeaz
- 참조 : https://youtu.be/XSflleJr4qM?list=PLxg0CGqViygP47ERvqHw_v7FVnUovJeaz
- 참조 : https://youtu.be/9TuPY67JBpo?list=PLxg0CGqViygP47ERvqHw_v7FVnUovJeaz
- 참조 : Multiple View Geometry in Computer Vision
- 이번 챕터의 이름은
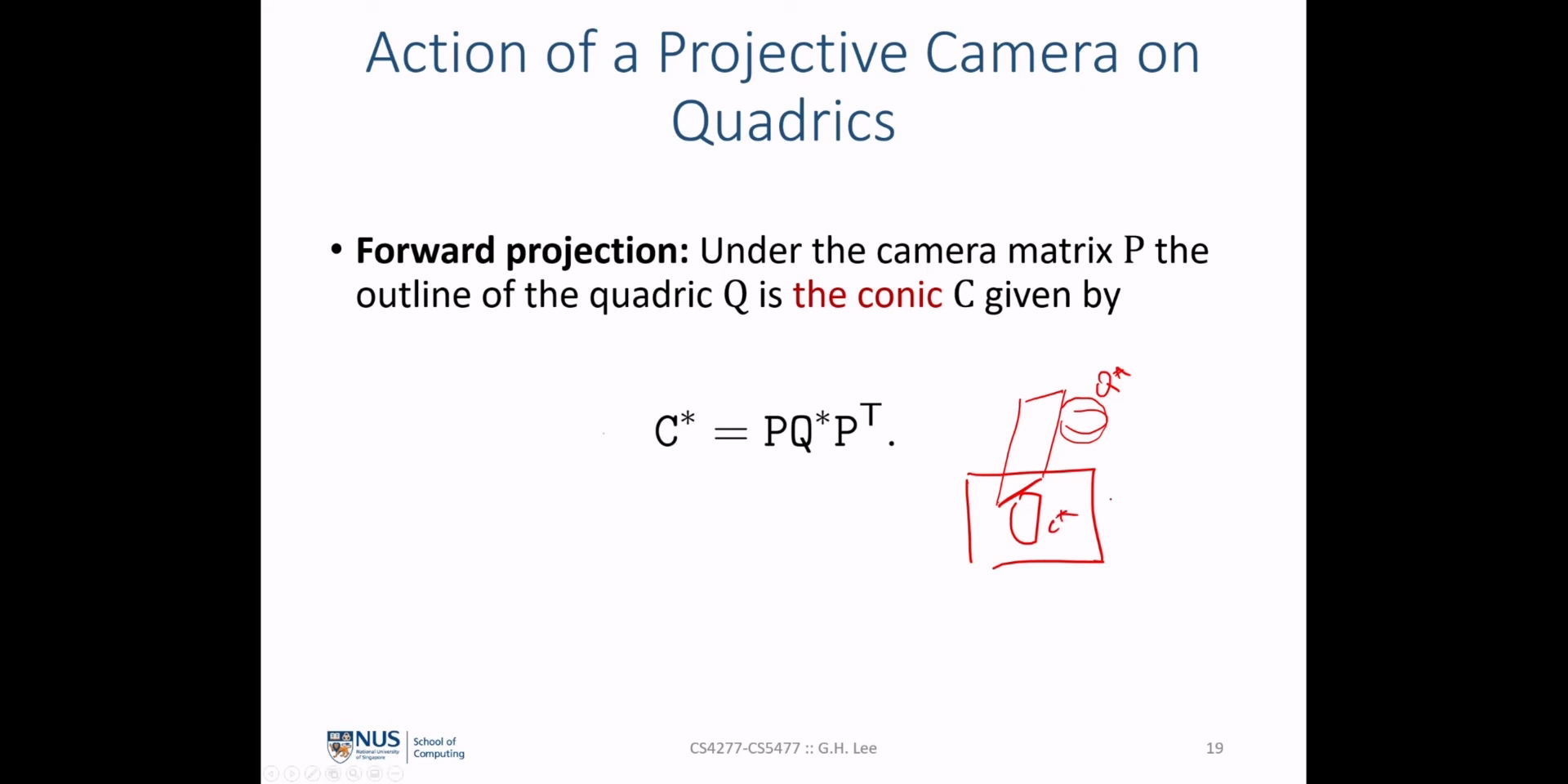
The Importance of the Camera Centre로 카메라 센터점에 관하여 다룹니다. - 앞에서 다룬
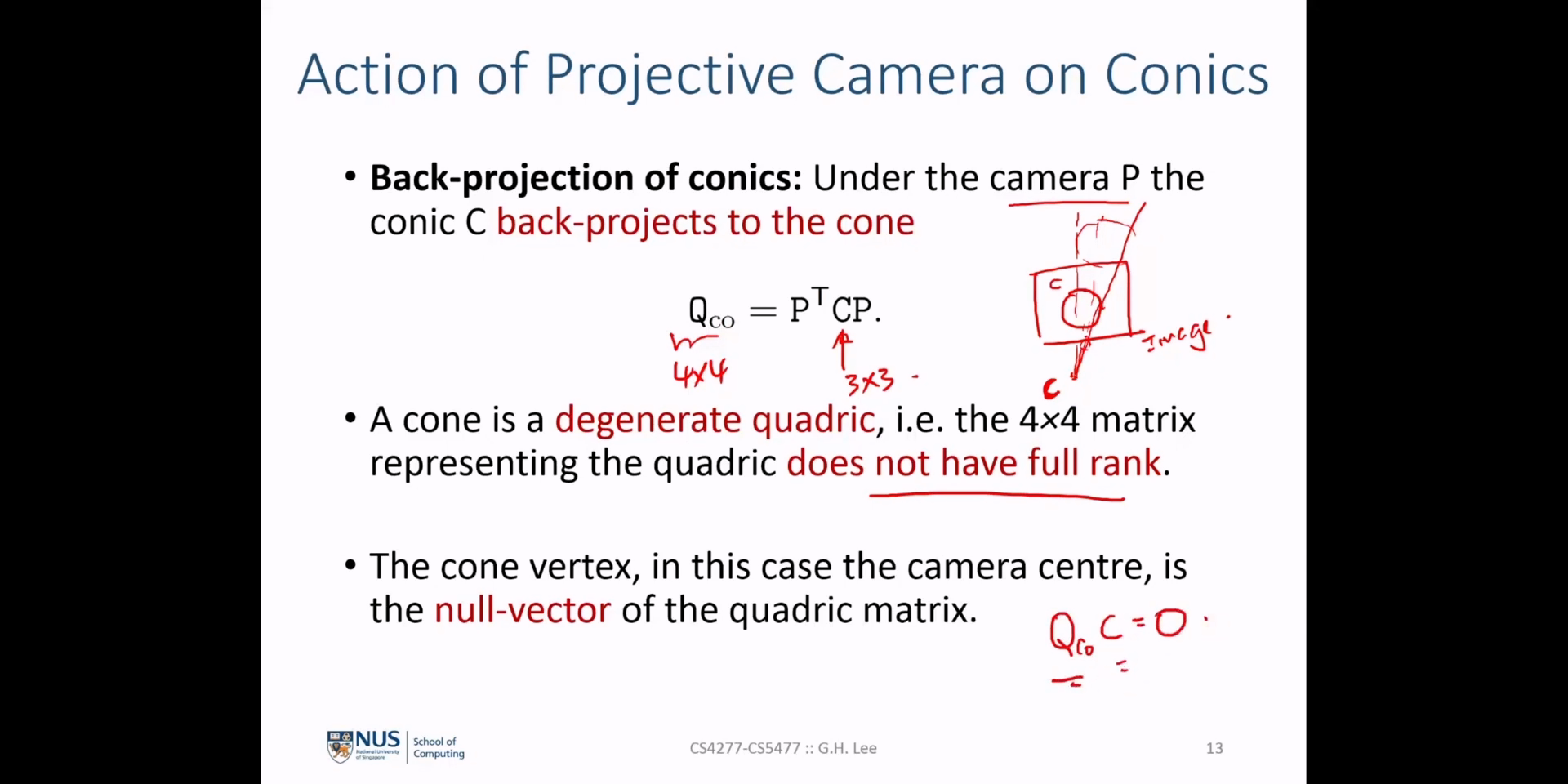
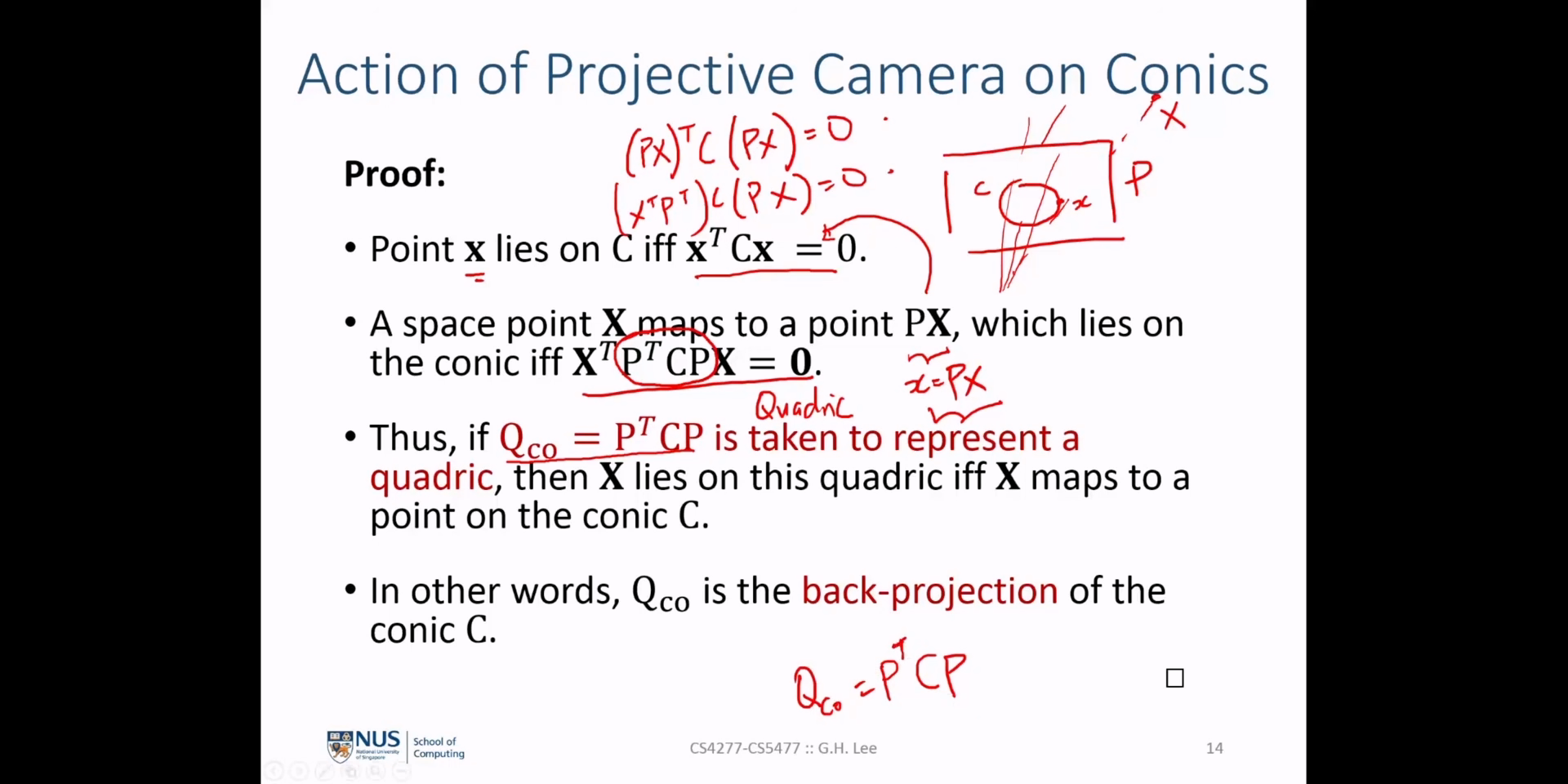
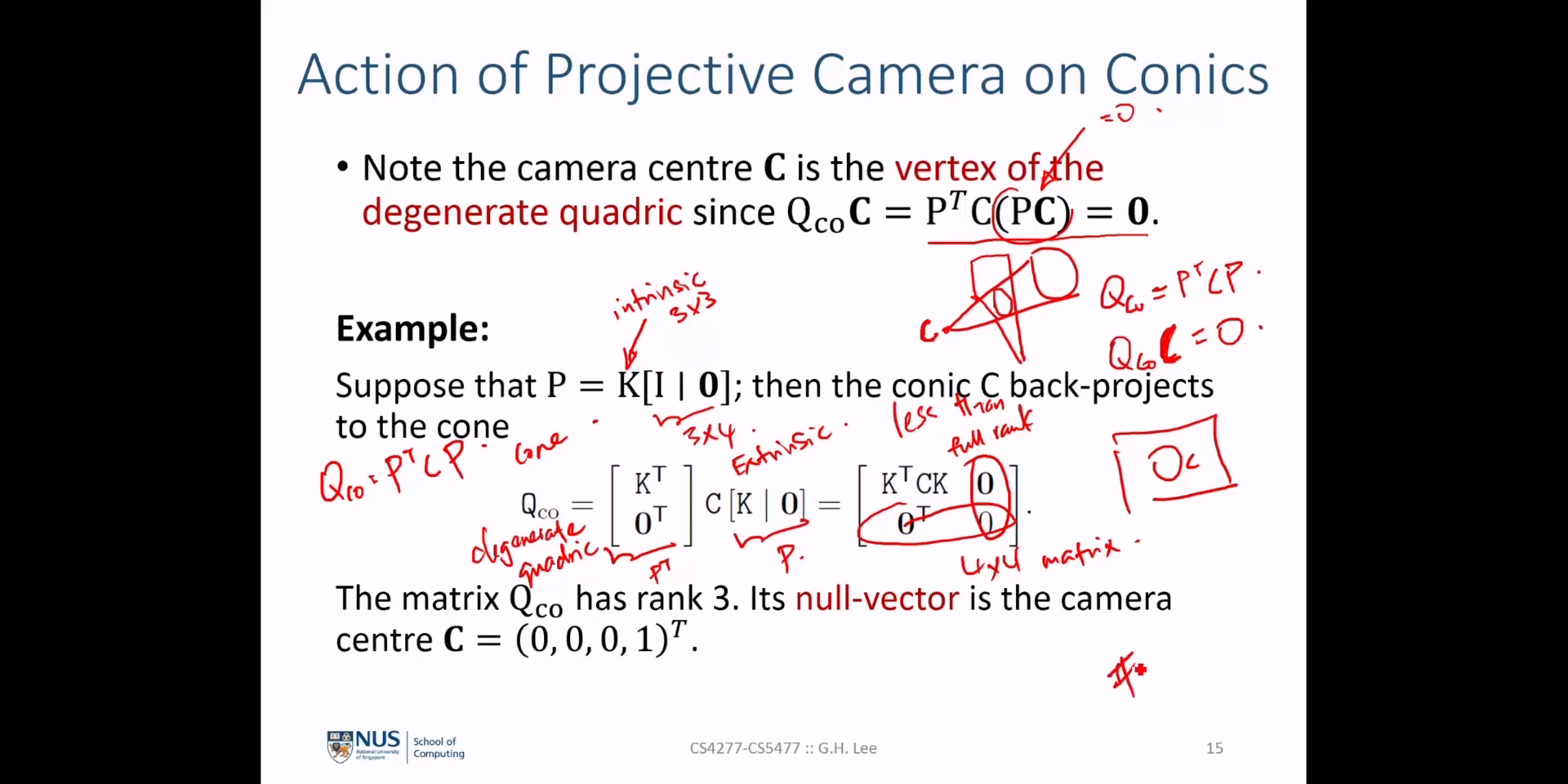
cone은 이상적인 기하 형태의cone을 나타내므로 하나의 꼭지점과 매끈한 면을 가진을cone을 생각하게 할 수 있습니다. - 반면 위 슬라이드에서 보여주는 형태의
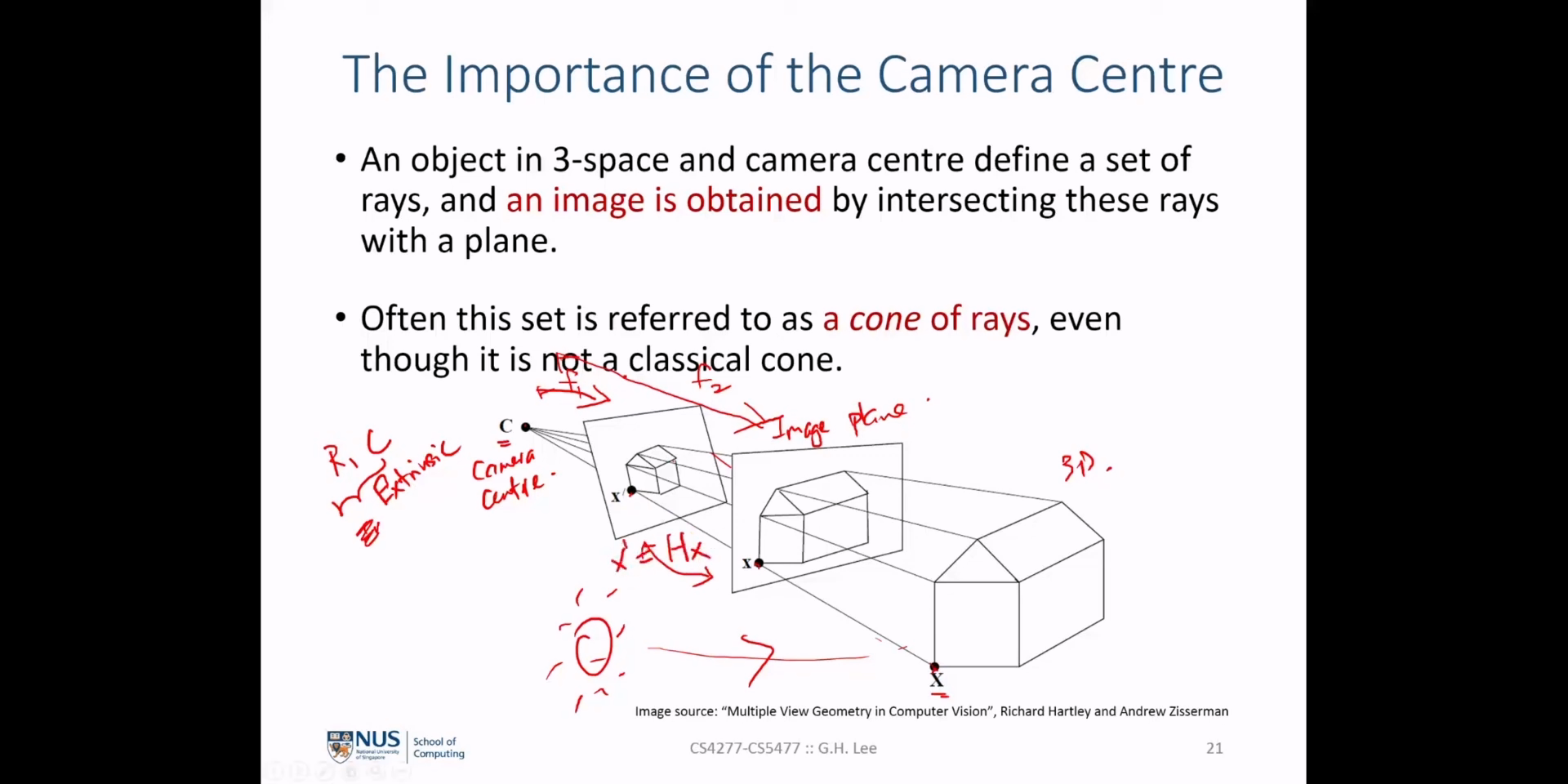
cone은 실제 이미지가 형성되는 형태와 연관되어 있습니다. - 카메라 센터점 \(C\) 를 꼭지점으로 시작하여
ray를 쏘았을 때, 형성되는cone과 같은 형태를 위 슬라이드에서는cone of rays라고 표현하며 위 슬라이드의 그림과 같습니다.cone of rays는 실제object가 존재하는 위치 까지 형성됩니다. - 이 때, 이미지는
cone of rays에서 어떤 위치에 어떤 방향으로 교차하도록 평면을 위치시키면ray들이 평면에 투영되는 데, 그 결과를 이미지 라고 볼 수 있습니다. - 위 슬라이드에서 표시된 것 처럼 같은
cone of rays에 표시되어 있으나focal length의 차이를 통하여 물체를 점점 더 확대하여 표현할 수 있음을 보여줍니다.
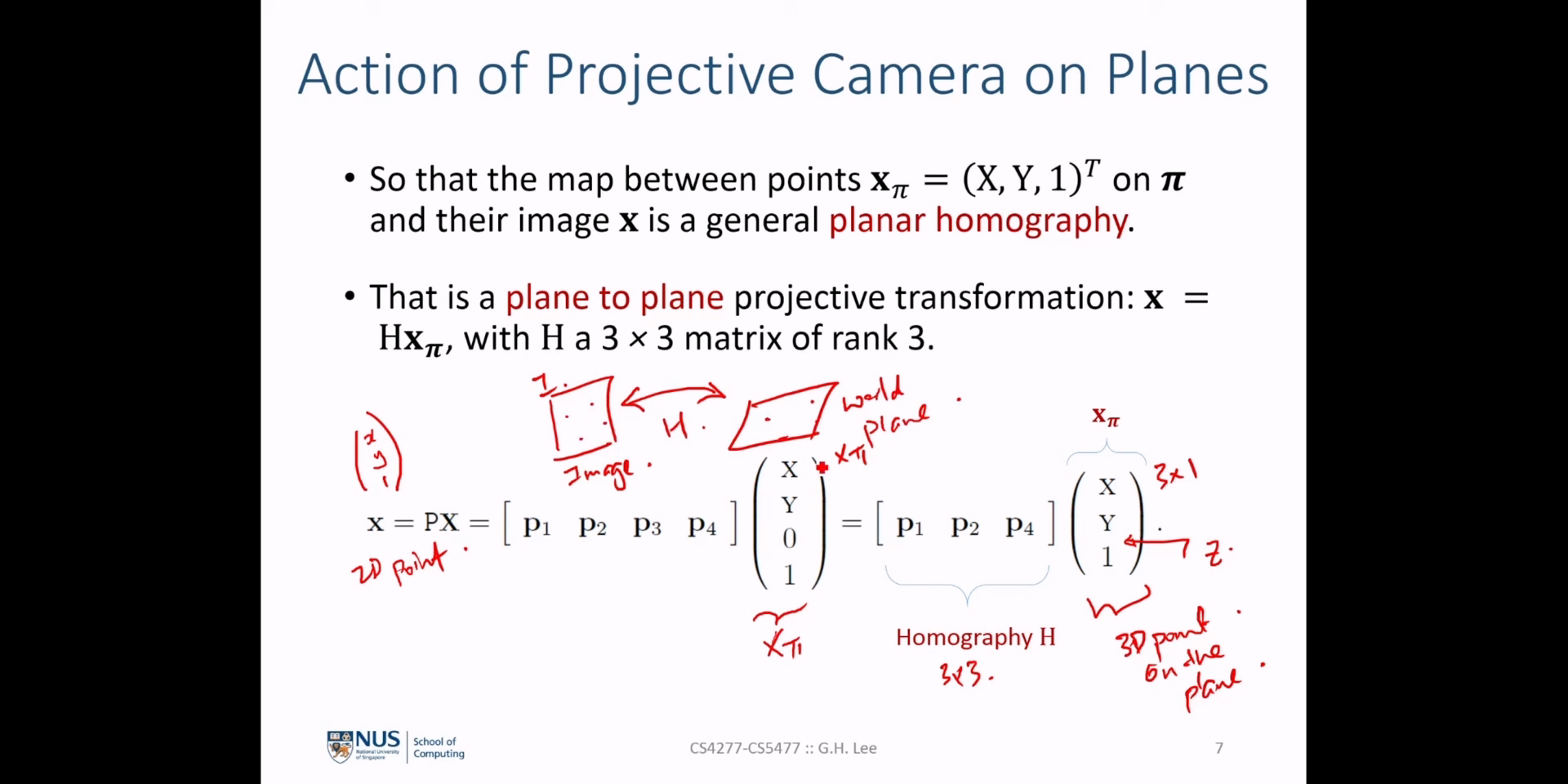
- 같은 카메라 센터점을 통하여 얻어진 이미지들은 어떤 평면에서 다른 평면으로의
projective transformation (Homography)관계를 가집니다. 예를 들어 이전 슬라이드에서 집 형태의 물체를 다양한 위치 및 방향으로 평면을 집어 넣어서 조금씩 다른 형상의 집 형태의 상이 맺히도록 이미지를 형성하였습니다. - 이 때, 서로 다른 형태의 집은
projective transformation관계를 가지게 되고 그 관계만 알 수 있다면 같은 형태로 만들 수 있습니다.projective transformation관계이기 때문에line은 그대로line으로 유지됩니다. - 서로 다른 평면의 이미지 간에는
projective transformation관계를 가지므로projective properties는 유지 됩니다. 이와 관련된 속성으로는incidence,cross ratio,conic section이 있습니다. (이전 글에서 다룬 내용입니다.)incidence는 2개의 점이 하나의 선에 있었다면projective transformation을 하더라도 2개의 점은 같은 하나의 선에 있다는 것입니다. 즉, 선은 그대로 선으로 유지됨을 의미합니다.cross ratio: 4개의 동일 선상에 존재하는 점들 간의 거리 비율은projective transformation을 하더라도 유지됨을 의미합니다.conic section: 어떤 이미지 상에서의conic section은projective transformation을 하더라도conic section으로 유지된다는 점입니다. 물론 어떤 변환 관계인 지에 따라서 다른 형태의conic section이 됩니다.
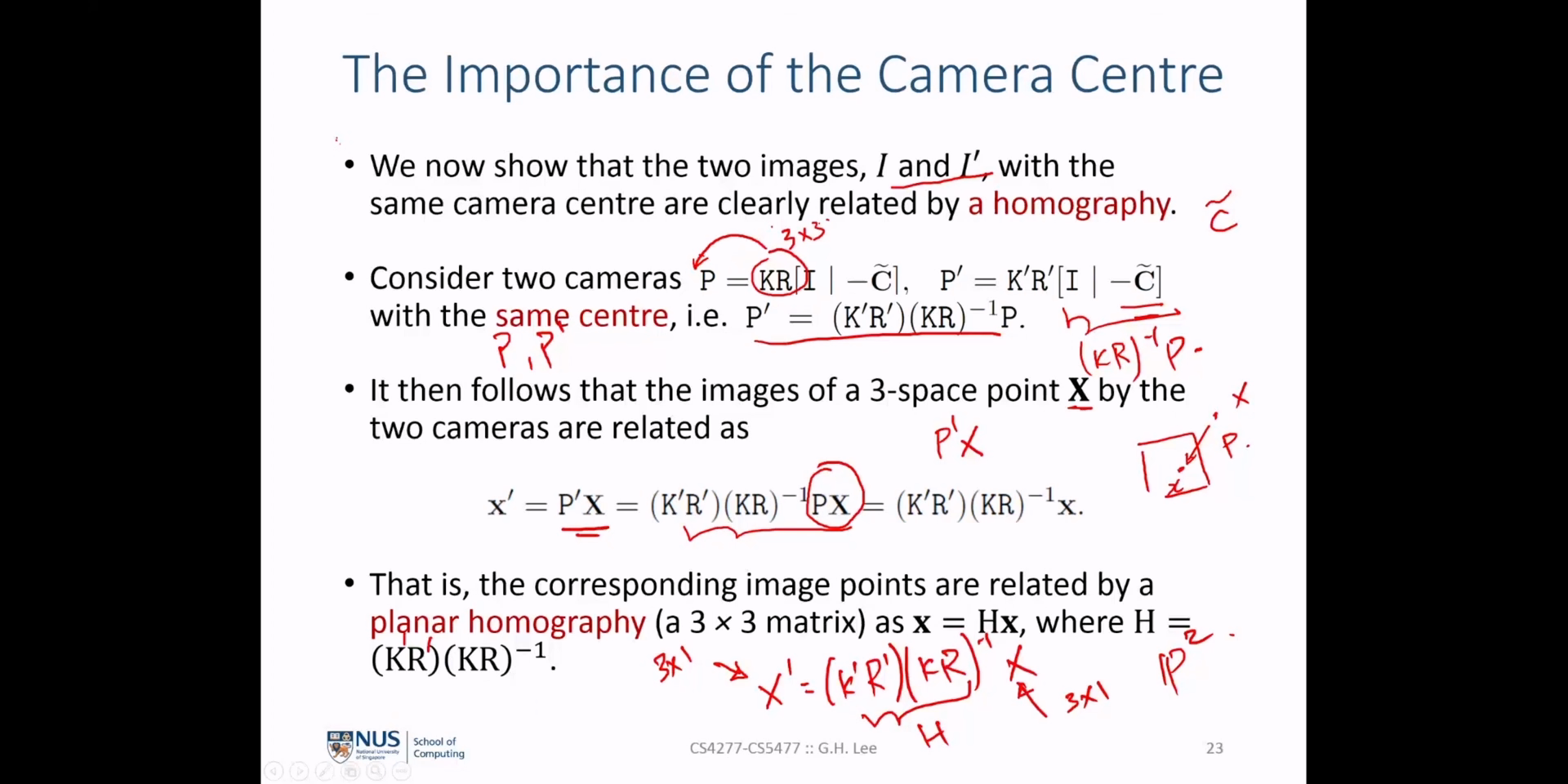
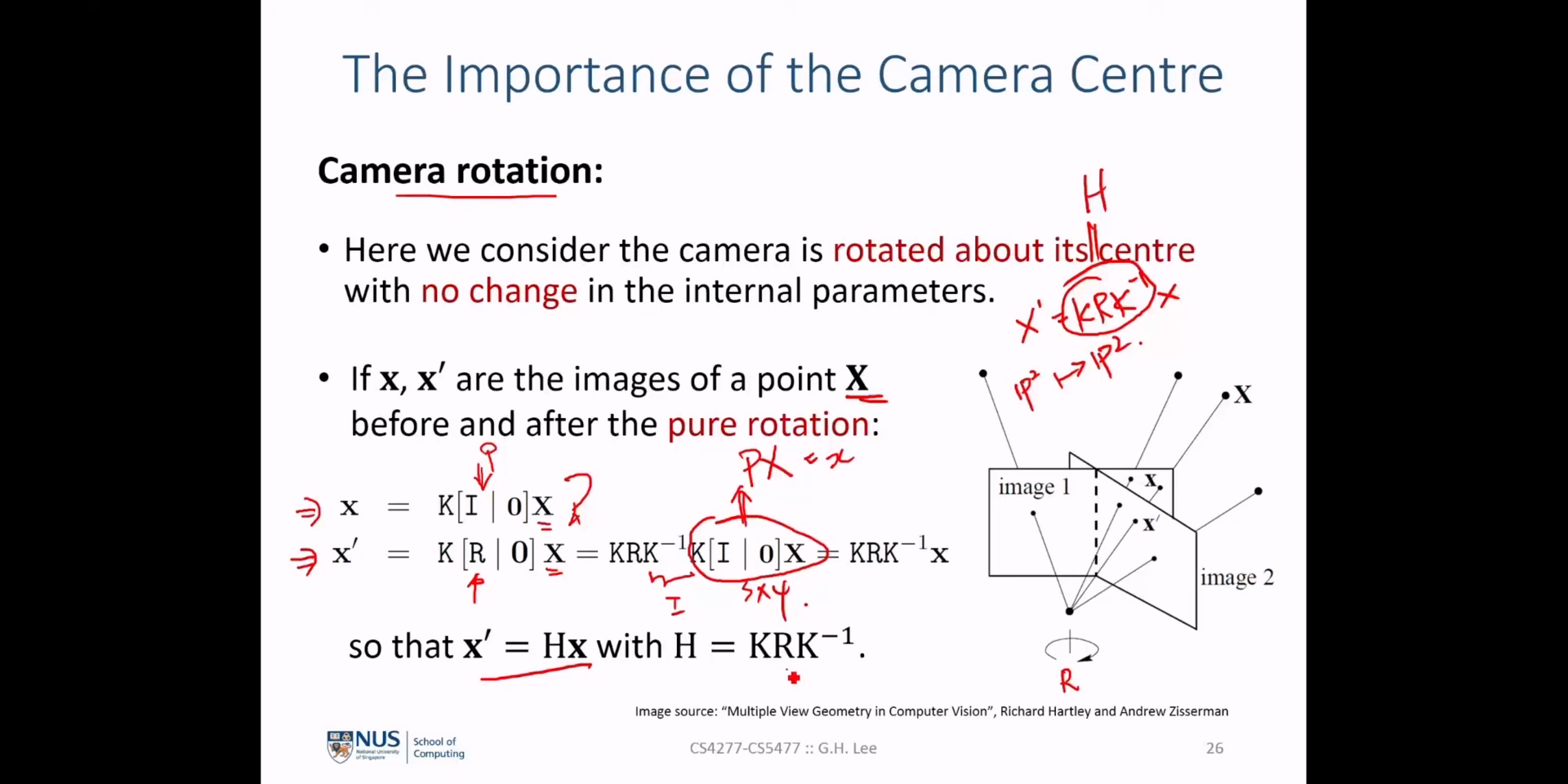
- 같은 카메라 센터점에서 촬영한 2개의 이미지 \(I\) 와 \(I'\) 에 대하여
projective transformation즉,homography관계를 가짐을 앞에서 살펴보았습니다. 이번 슬라이드에서는 이 부분에 대하여 좀 더 수식적으로 살펴봅니다. - 위 슬라이드에서 \(K\) 는
intrinsic parameter( \(3 \times 3\) 크기의 행렬)을 의미하고 \(R\) 은extrinsic parameter( \(3 \times 3\) 크기의 행렬)을 의미합니다. \(-\tilde{C}\) 는 원점에서 카메라 중점 까지의 거리를 나타냅니다. (translation의미로 이 부분도 이전 강의에서 다루었습니다.) - 같은 카메라 중점을 고려하기 때문에 \(P\) 와 \(P'\) 모두 \(-\tilde{C}\) 을 사용하였습니다. 나머지 \(K, R\) 은 서로 다른 카메라를 고려하였기 때문에 \(K, R\) 과 \(K', R'\) 로 구분하였습니다.
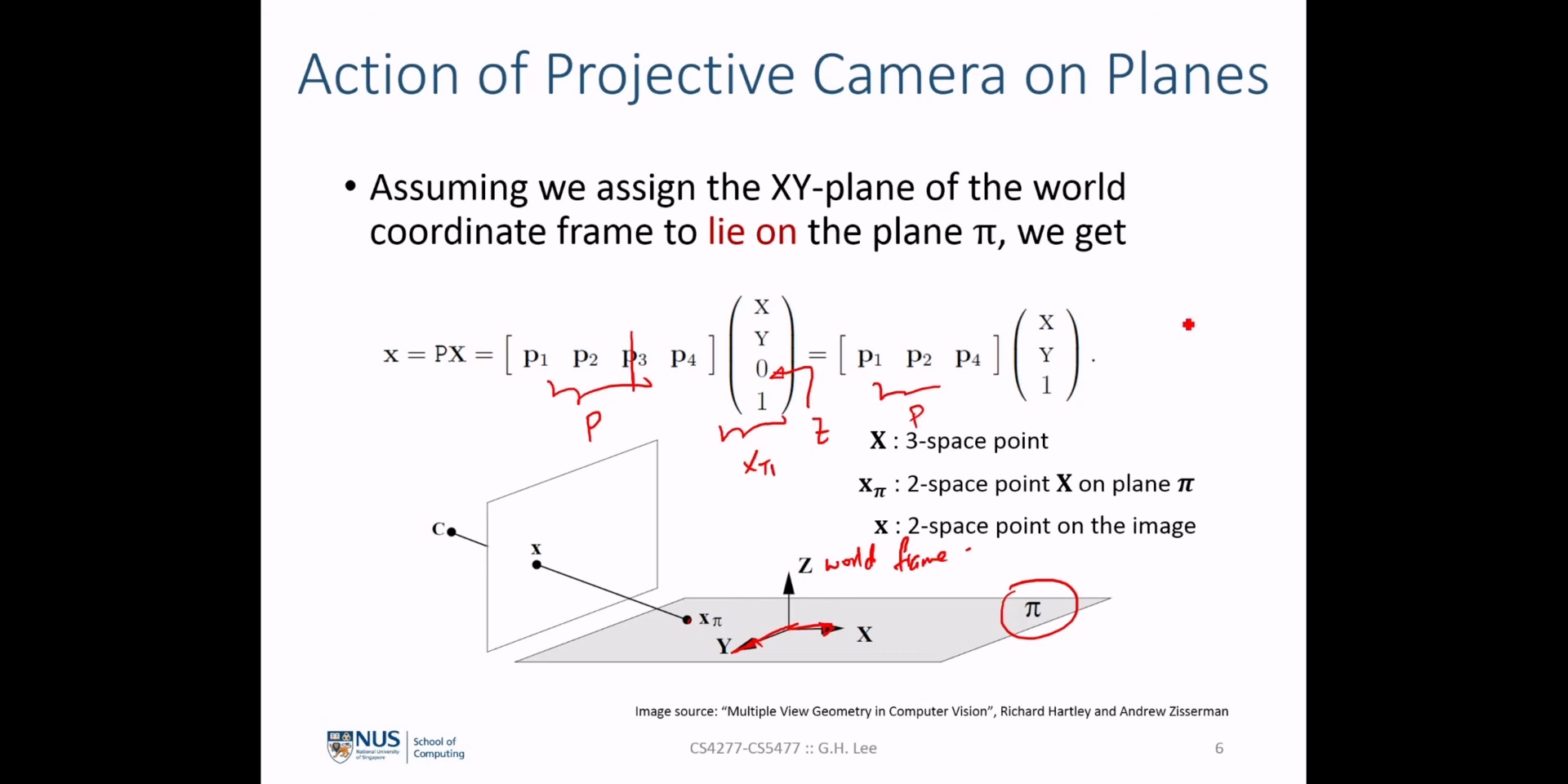
- 이미지에 표현된 3D 공간 상에서의 점 \(X\) 는 위 슬라이드에 있는 식을 통하여 2개의 카메라에서 다음과 같은 관계로 표현됩니다.
- \[x' = P'X = (K'R')(KR)^{-1}PX = (k'R')(KR)^{-1}x\]
- 따라서 앞에서 언급한
homography\(H\) 는 \(H = (K'R')(KR)^{-1}\) 로 정의할 수 있습니다. - 3D 공간 상의 점들을 변환하는 관계이지만 2D 이미지 상에서 변환이 발생하므로
planar homography라는 용어로 표현합니다.
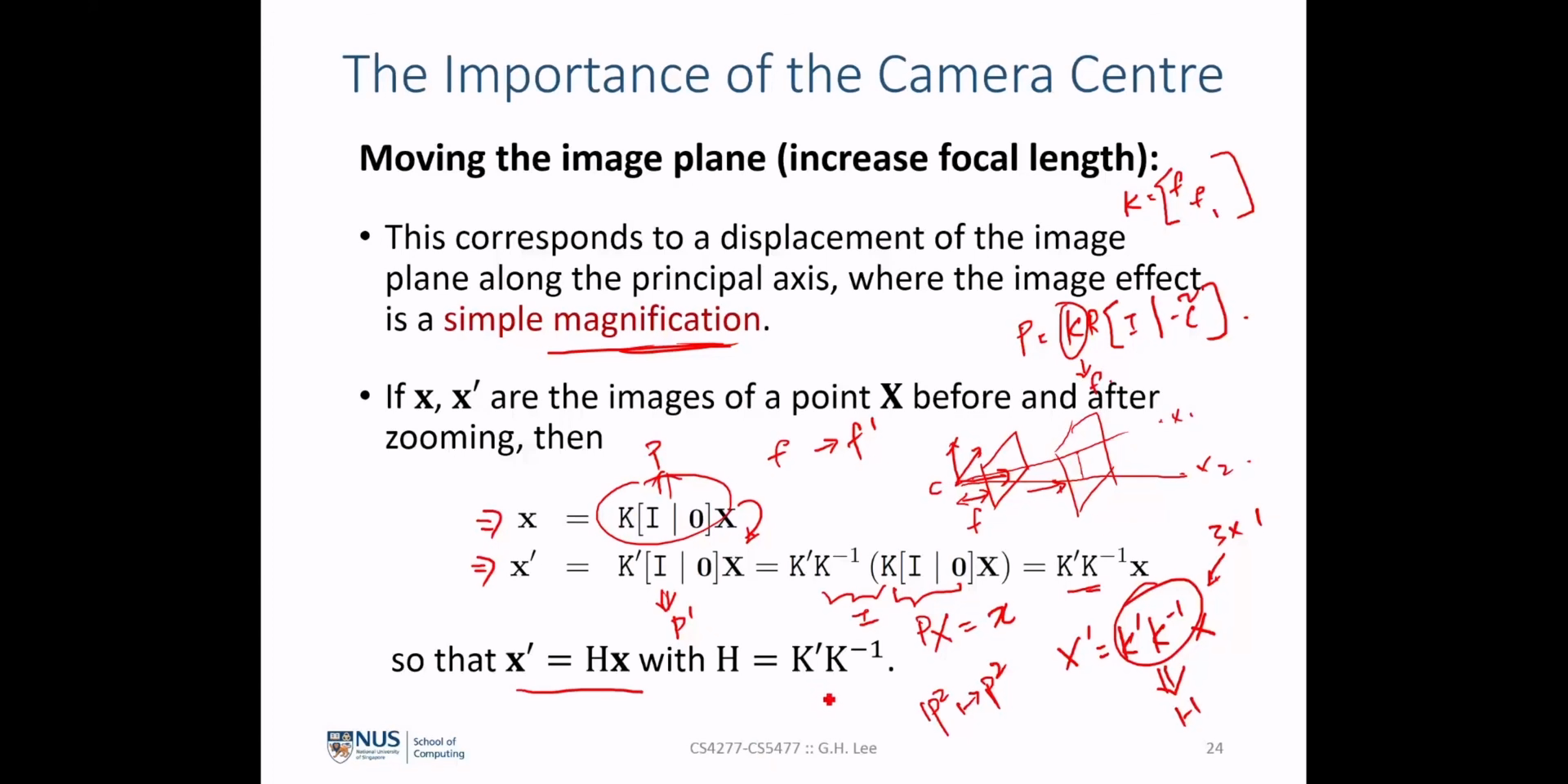
- 이번 슬라이드에서는
focal length의 증가에 따라서 이미지 평면에서의 변화와 관련된 내용을 다룹니다.
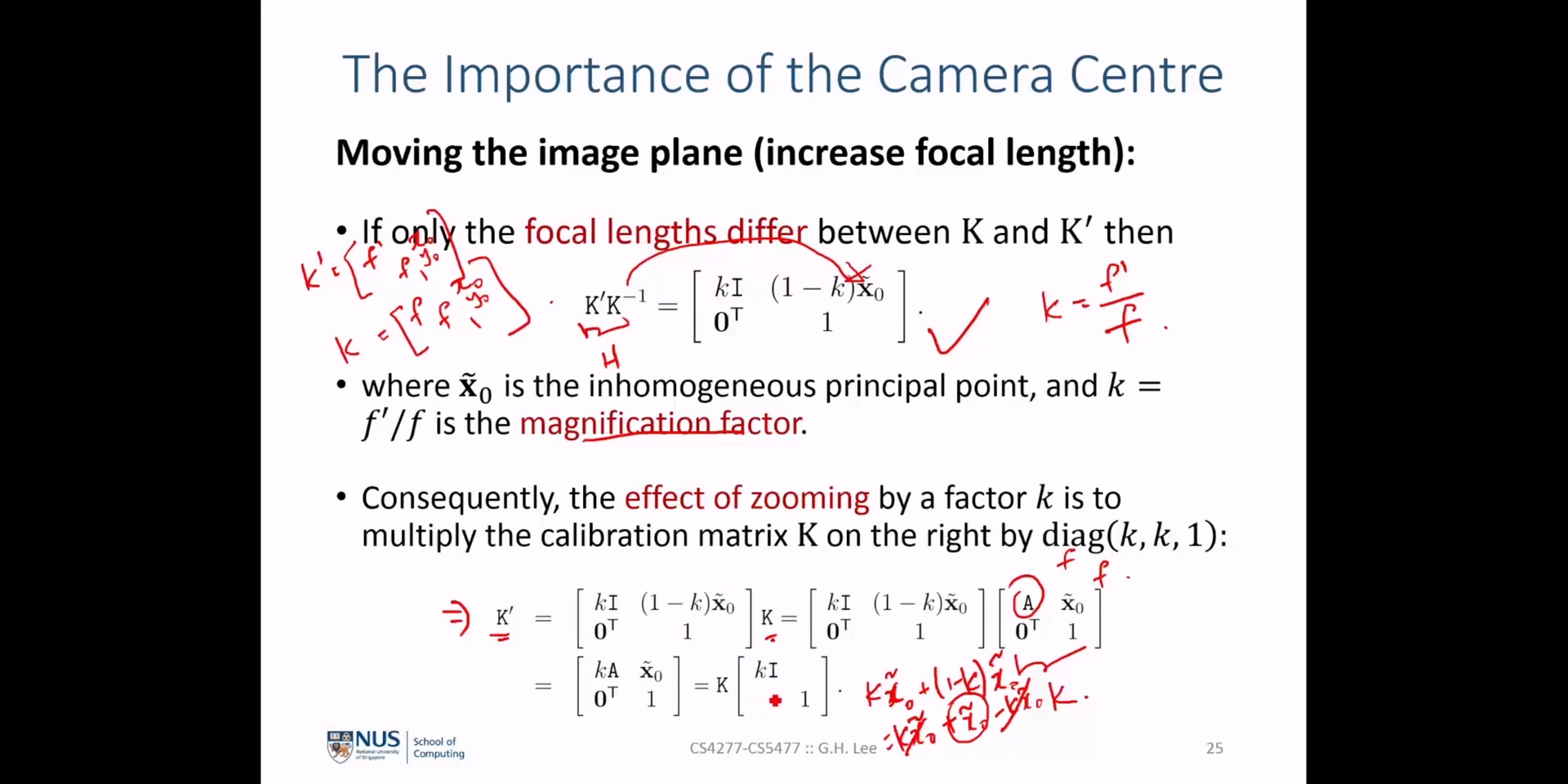
- 슬라이드의 \(K'K^{-1}\) 의 행렬에서 \((1 - k)\tilde{x}_{0}\) 가 사용된 이유를 살펴보면 다음과 같습니다.
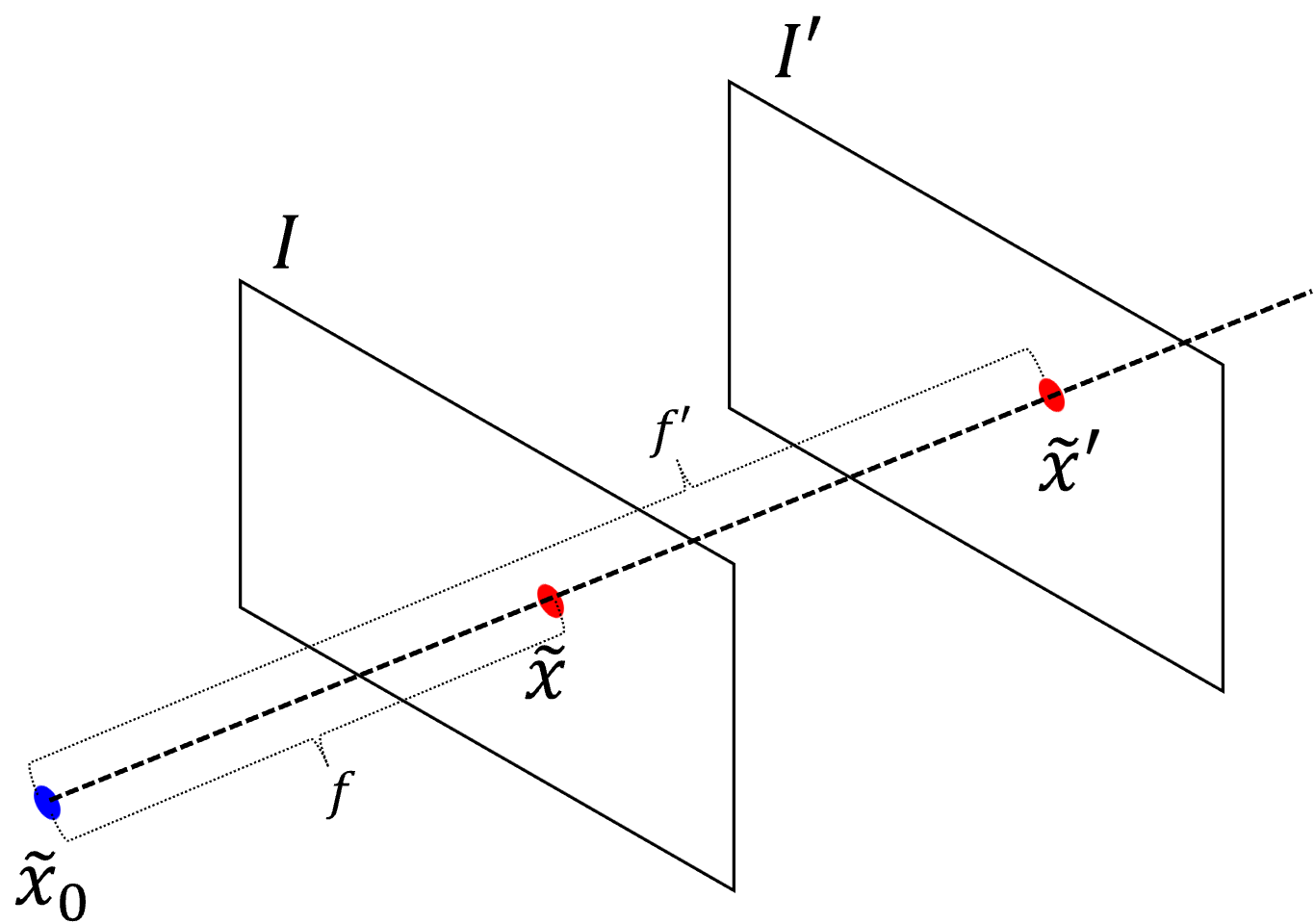
- 위 그림과 같이 \(\tilde{x}_{0}\) 는
principal point를 뜻하고magnification factor인 \(k = f'/f\) 가 됩니다. - 위 그림에서 \(\tilde{x}'\) 는 다음과 같이 정의할 수 있습니다.
- \[\begin{align} \tilde{x}' &= \frac{f'}{f}(\tilde{x} - \tilde{x}_{0}) + \tilde{x}_{0} \\ &= \frac{f'}{f}\tilde{x} + (1 - \frac{f'}{f})\tilde{x}_{0} \\ &= k\tilde{x} + (1 - k)\tilde{x}_{0} \end{align}\]
- 따라서 \(\tilde{x}' = k\tilde{x} + (1-k)\tilde{x}_{0}\) 로 표현할 수 있음을 확인하였습니다. 즉, \(I\) 이미지에서의 점 \(\tilde{x}\) 를 \(I'\) 이미지의 점 \(\tilde{x}'\) 로 변환하기 위해서는 \(k\) 배를 한 후 \((1-k)\tilde{x}_{0}\) 만큼 이동해 주면 됩니다.
- 이 내용을 이미지의 \(u, v\) 방향에 대하여 모두 적용해 주면
focal length의 차이를 반영하는 행렬 \(K'K^{-1}\) 은 다음과 같이 정의할 수 있습니다.
- \[K'K^{-1} = \begin{bmatrix} k & 0 & (1-k)c_{x} \\ 0 & k & (1-k)c_{y} \\ 0 & 0 & 1 \end{bmatrix} = \begin{bmatrix} kI & (1-k)\tilde{x}_{0} \\ 0^{T} & 1 \end{bmatrix}\]
- 이전 강의에서는 카메라의 센터점이 동일한 상태에서의 서로 다른 상태로 취득한 이미지에 대하여
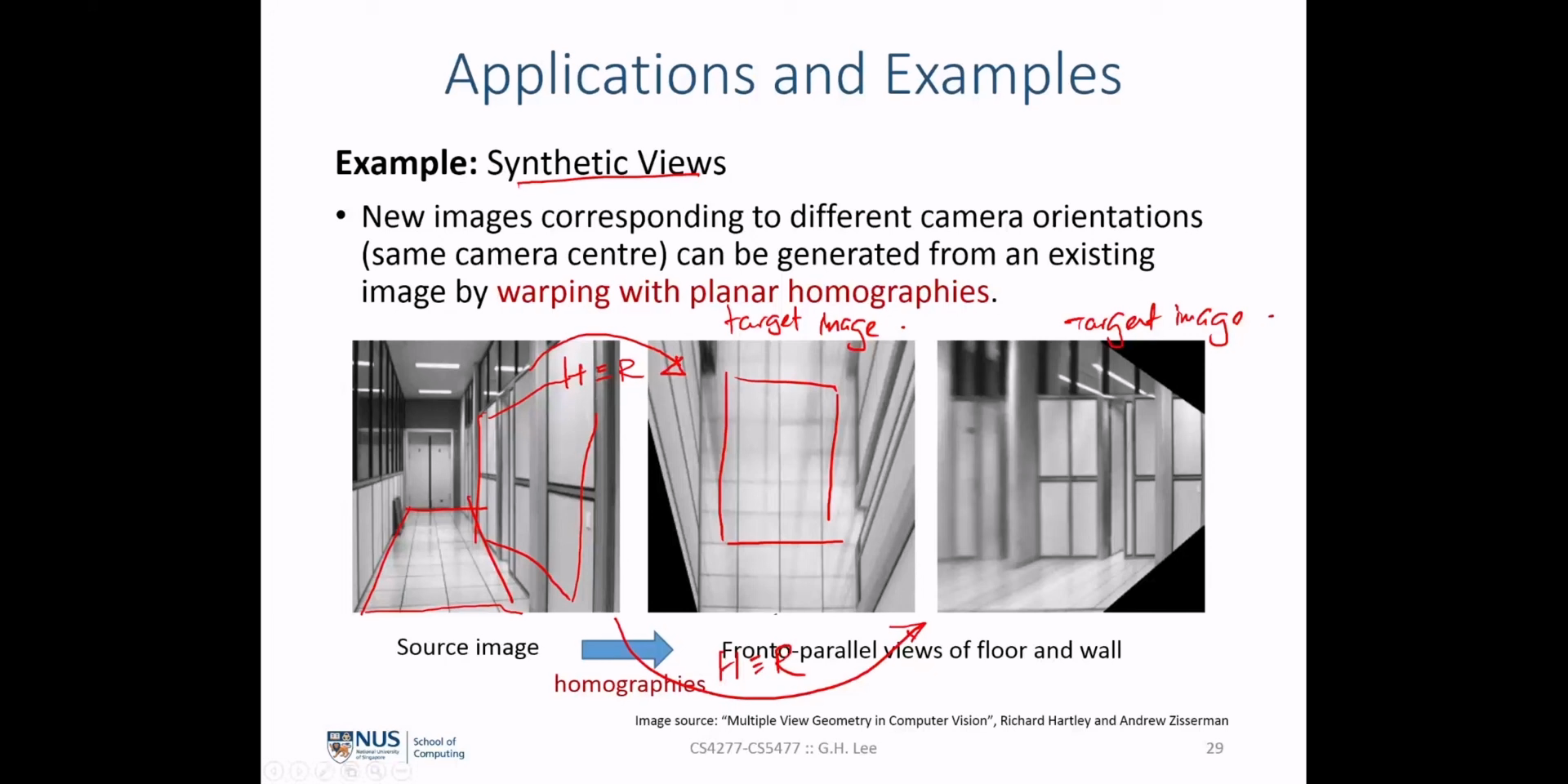
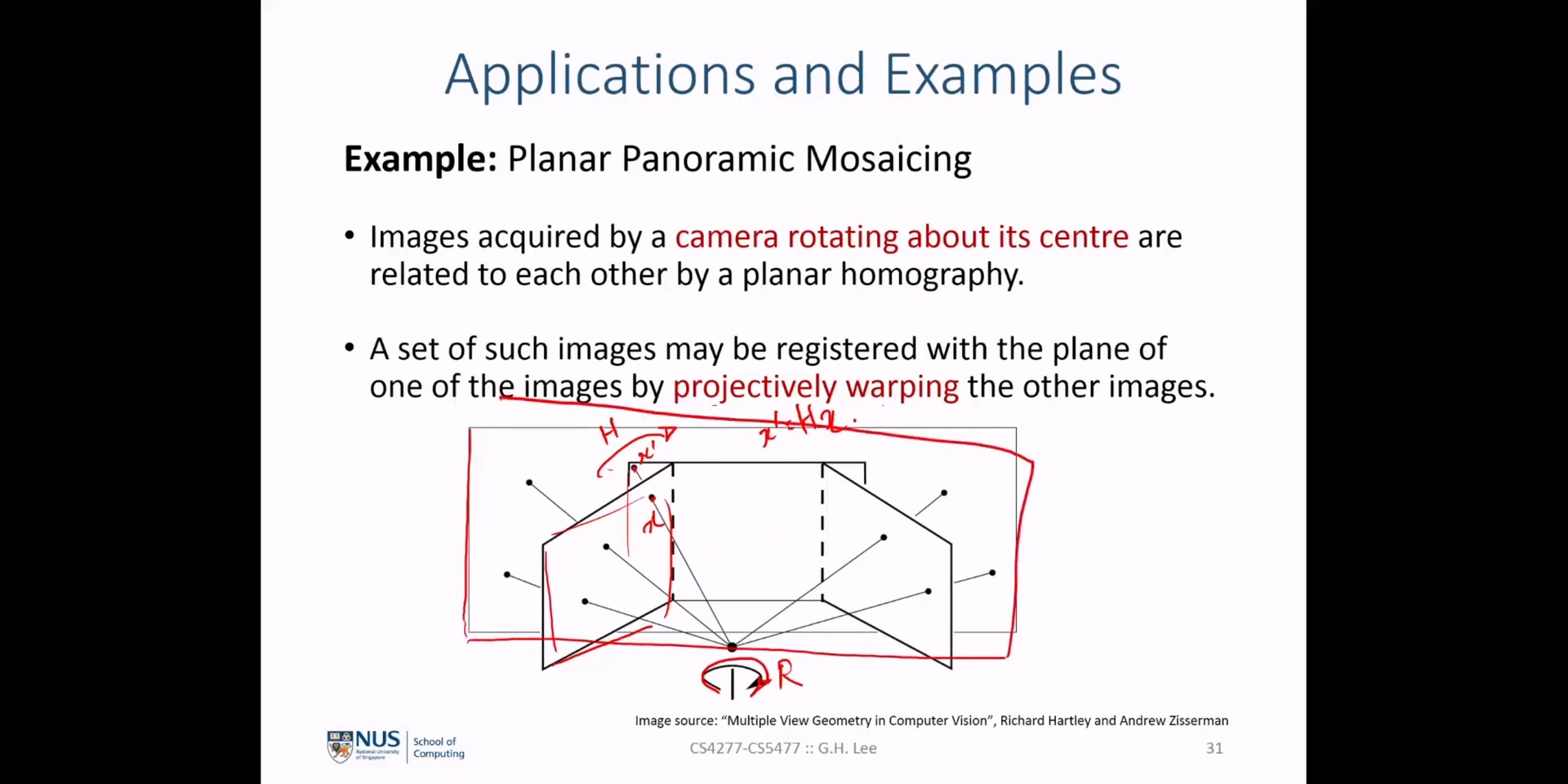
homography를 이용하면 이론적으로 이미지들을 서로 복원할 수 있음을 확인하였습니다. - 이번 슬라이드에서 부터는 그 이론적인 내용을 이용하여 적용할 수 있는 대표적인 Application인
Synthetic Views와Planar Panoramic Mosaicing입니다.
- 먼저
Synthetic Views는 위 그림과 같이source image로 부터planar homography를 이용하여 새로운 형태의target image로 생성하는 것을 의미합니다.planar homography를 이용한 이미지 변환은 카메라 센터점은 고정한 상태에서 카메라의 촬영 방향을 변화하는 효과를 줄 수 있도록 할 수 있습니다. planar homography는 3 x 3 크기의 행렬로 어떤 이미지의 점들을 다른 이미지의 점들로 변환할 수 있도록 하며 3 x 3 행렬의 성분을 통하여rotation,translation,scale및perspective distortion이 이미지 변환 시 어떻게 바뀌는 지 설명해 줄 수 있습니다.systhetic view를 생성하기 위해서는 기본적으로 다음의 절차를 따릅니다.- ①
source image와target image에 서로 대응되는 (같은 위치를 가리키는) 점들을 확인합니다. - ② 이 점들 쌍을 이용하여
homograpy matrix를 계산합니다. - ③
homography를 적용하여source image를target image로 생성합니다. (synthetic view)
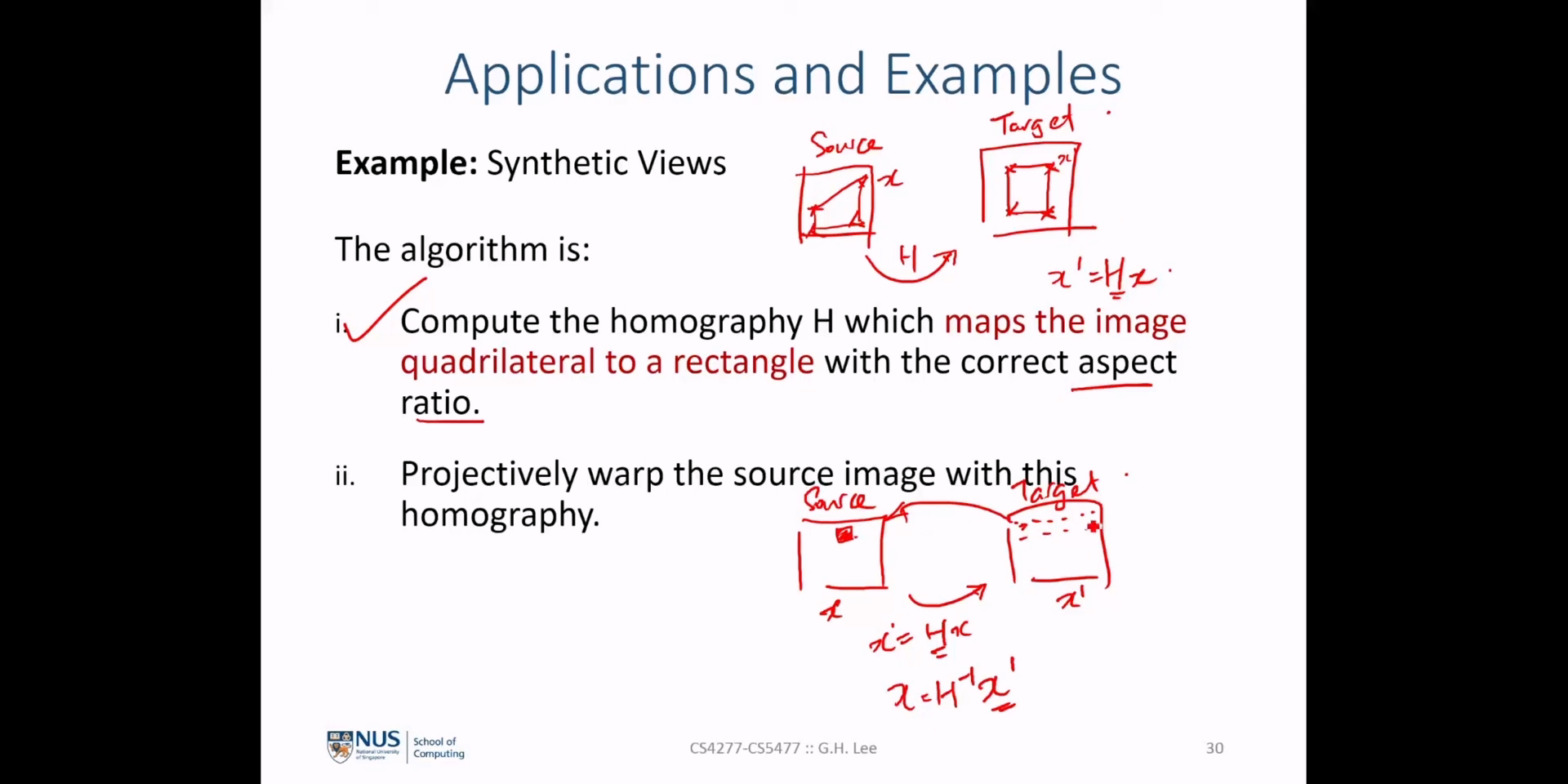
- 앞에서 설명한 바와 같이
source image에서 임의의 사각형을 지정하고target image에서 이 사각형이 어디에 위치해 있는 지 알 수 있으면homography를 계산할 수 있습니다.homography를 계산하는 일반적인 방법은source image와target image에 대응되는 점들의 쌍을 선형 방정식의 해를 푸는 방식으로 구합니다. 자세한 내용은 아래 글을 참조하시면 됩니다.
- 이와 같은 방법은 통해 \(H\) 를 구하면
source image에서 \(x\) 점을target image에서 \(x' = Hx\) 로 변환할 수 있으며 필요한 영역의 모든 점을 이와 같이 변환하면 필요한 영역의 이미지를 구할 수 있습니다. 이와 같은 작업은warping이라고 하기도 합니다.
- 이번에는 카메라 캘리브레이션을 통해 어떤 정보를 얻을 수 있는 지 살펴보도록 하겠습니다.
- 이전 강의에서 다루었듯이 카메라 캘리브레이션을 통하여 카메라의
intrinsic와extrinsic파라미터를 얻을 수 있었고intrinsic파라미터를 통해focal length,optical center,lens distortion등을 구할 수 있으며extrinsic파라미터를 통하여 카메라와 world의 관계를 구할 수 있었습니다. - 이전 강의에서는 이와 같은 의미를 가지는
intrinsic과extrinsic파라미터를 이용하여 2D 이미지와 3D 공간 상의 정보를 변환하는projection matrix를 구하여 사용하였고 이 행렬은 \(3 \times 4\) 크기를 가졌습니다. 또한projection matrix를 역으로 분해를 하면intrinsic과extrinsic을 구할 수 있었습니다.
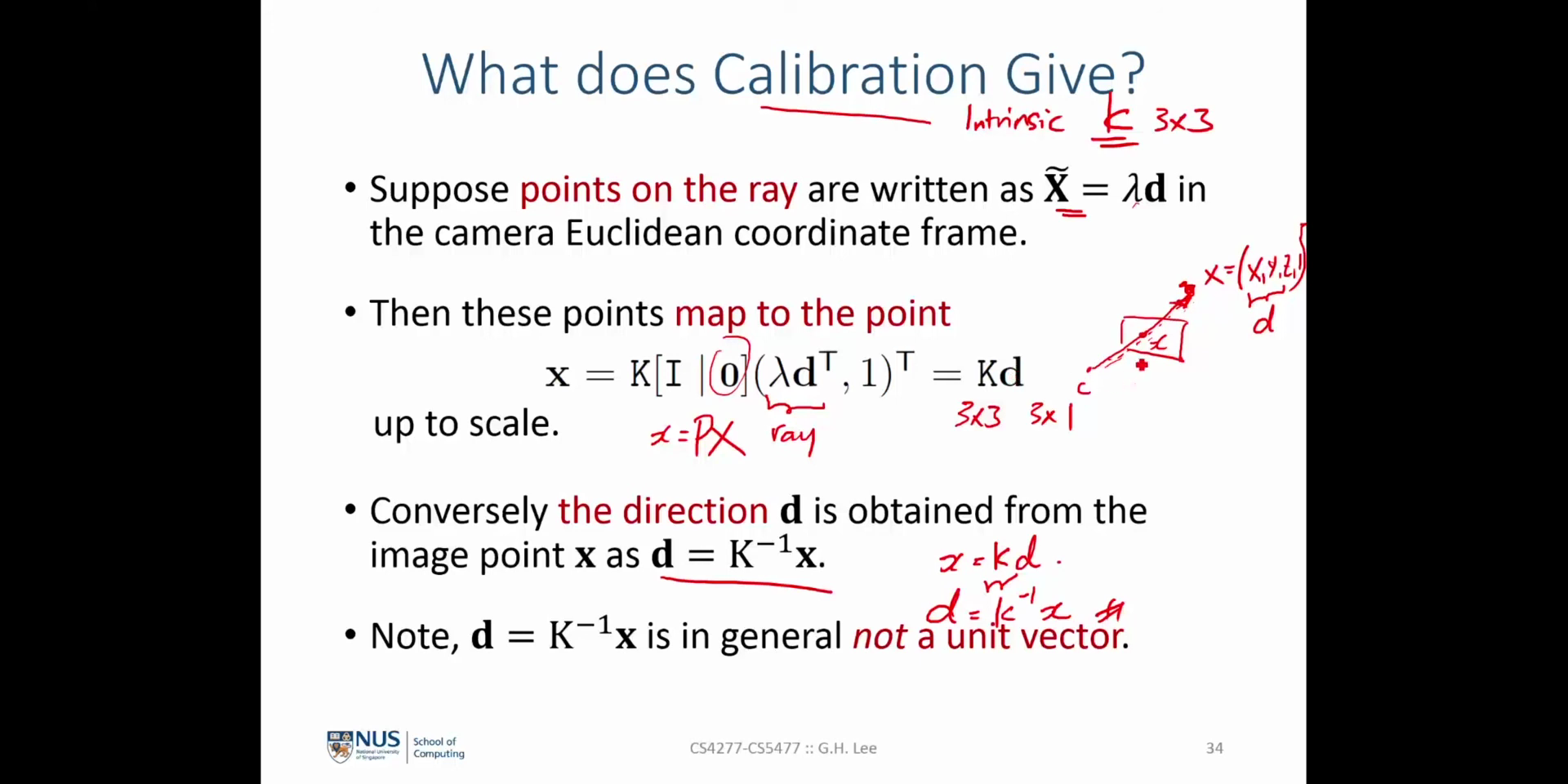
- 위 슬라이드에서의 \(\tilde{X} = \lambda d\) 는 카메라 좌표계 상의 3D 점을 의미하고 \(d\) 는 카메라 센터점으로 부터 뻗어나가는 방향 벡터에 해당하며 \(\lambda\) 는 그 방향의
depth를 의미합니다. - 위 슬라이드의 \(x = K[I \vert 0] ( \lambda d^{T}, 1) ^{T} = Kd\) 식은 카메라 좌표계의 3D 포인트가 어떻게 2D 이미지에 투영되는 지 나타냅니다. 여기서 \(K\) 는 카메라
intrinsic파라미터이고 \([I \vert 0]\) 은extrinsic파라미터를 나타내며 여기서는 world의 원점에서 간단히z축을 바라보는 카메라를 의미하도록 하여 간략하게 나타내었습니다. - 식 \(d = K^{-1} x\) 를 통하여 이미지의 점 \(x\) 는 다시 \(d\) 벡터로 나타낼 수 있으며 이와 관련된 내용은 앞선 강의에서 다루었습니다.
homogeneous좌표계로 나타내고 있기 때문에 \(d\) 는 반드시unit vector일 필요는 없으며 scale은 달라질 수 있습니다. - 정리하면 카메라 캘리브레이션 정보는 2D 이미지와 3D 공간 상의 정보를 연결해 주는 역할을 하고 있으며 이 정보는 다양한 task에 사용될 수 있습니다.
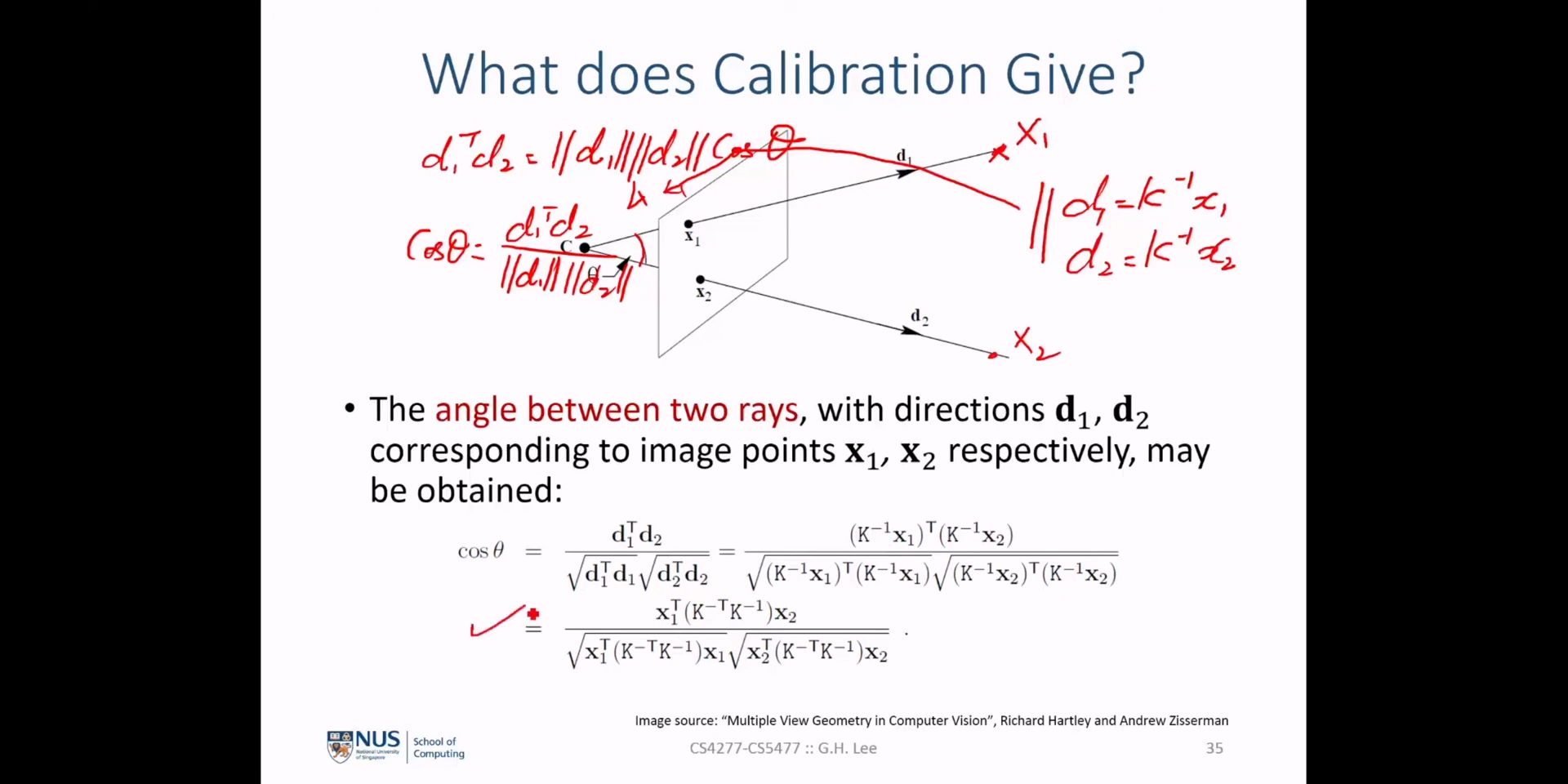
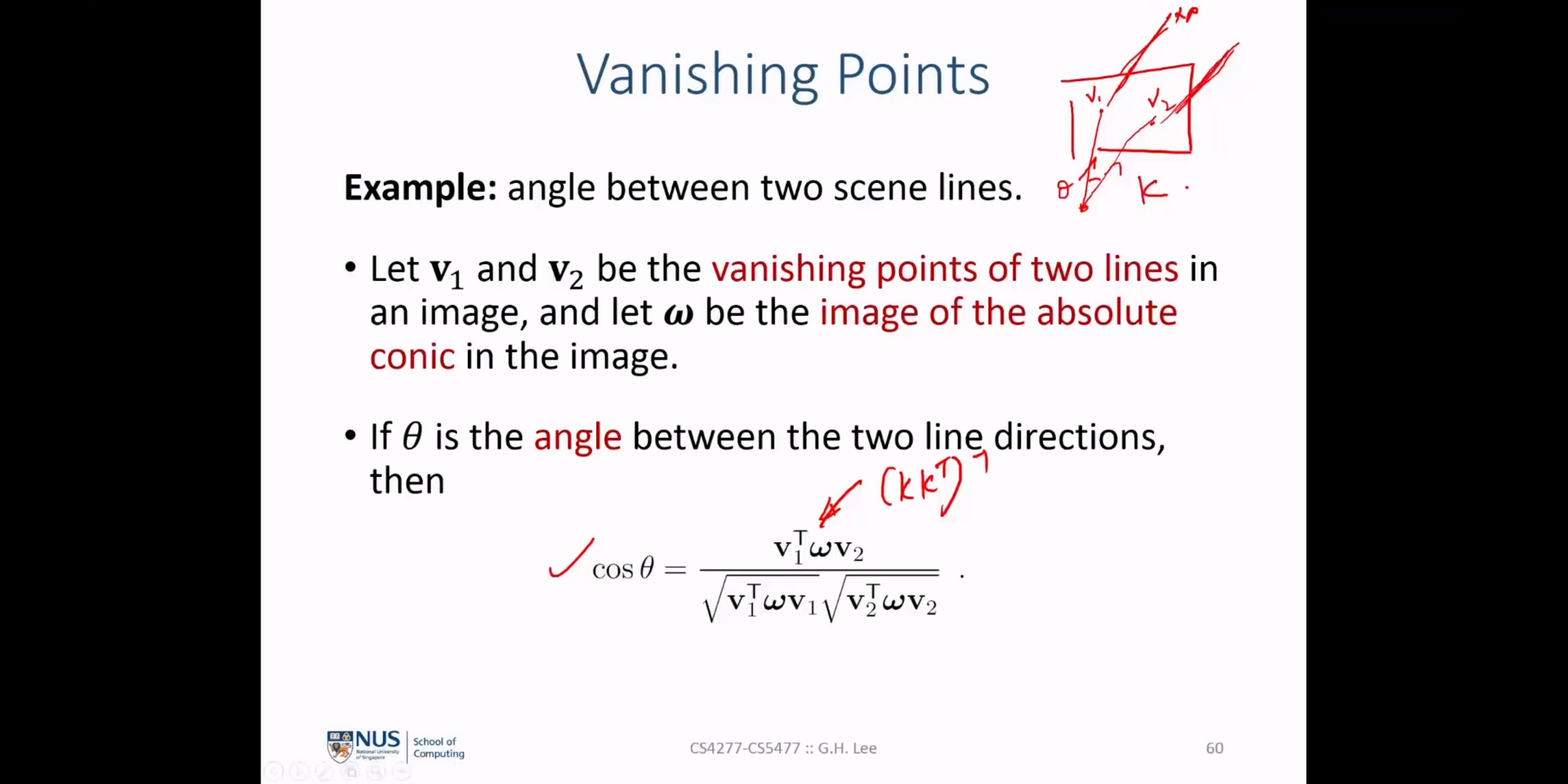
- 2D 이미지의 두 점 \(x_{1}, x_{2}\) 는 \(d_{1} = K^{-1}x_{1}\) 과 \(d_{2} = K^{-1}x_{2}\) 로 변형하여 두 벡터 간의 사이각을 구할 수 있습니다. 다음과 같습니다.
- \[\begin{align} \cos{\theta} &= \frac{d_{1}^{T} d_{2} }{ \sqrt{d_{1}^{T}d_{1}} \sqrt{d_{2}^{T}d_{2}} } \\ &= \frac{ (K^{-1}x_{1})^{T}(K^{-1}x_{2}) }{ \sqrt{ (K^{-1}x_{1})^{T}(K^{-1}x_{1}) } \sqrt{ (K^{-1}x_{2})^{T}(K^{-1}x_{2}) } } \\ &= \frac{ x_{1}^{T} (K^{-T}K^{-1})x_{2} } { \sqrt{ x_{1}(K^{-T}K^{-1})x_{1} } \sqrt{ x_{2}^{T}(K^{-T}K^{-1})x_{2} } } \end{align}\]
- 이 방법은 두 카메라 간의 상대적인
pose를 구하거나multiple view를 고려한 3D 점의triangulation을 구할 때 사용되곤 합니다.
- 카메라 캘리브레이션을 통하여 카메라
intrinsic파라미터 \(K\) 를 알게 되었다면 \(K^{-T}K^{-1}\) 또한 알 수 있습니다. - 이 값은 꽤 유용하게 사용될 수 있는데 이 값을 통하여 이미지의 점들을 3D 공간 상의
ray로 보낼 수 있으며 반대로도 적용할 수 있습니다. - 정리하면 파라미터 \(K\) 만 알 수 있으면 이미지 상의 점들 만으로도 3D 공간 상의
ray의 방향 또한 알 수 있고 이미지 점들 사이의각도또한 알 수 있습니다.
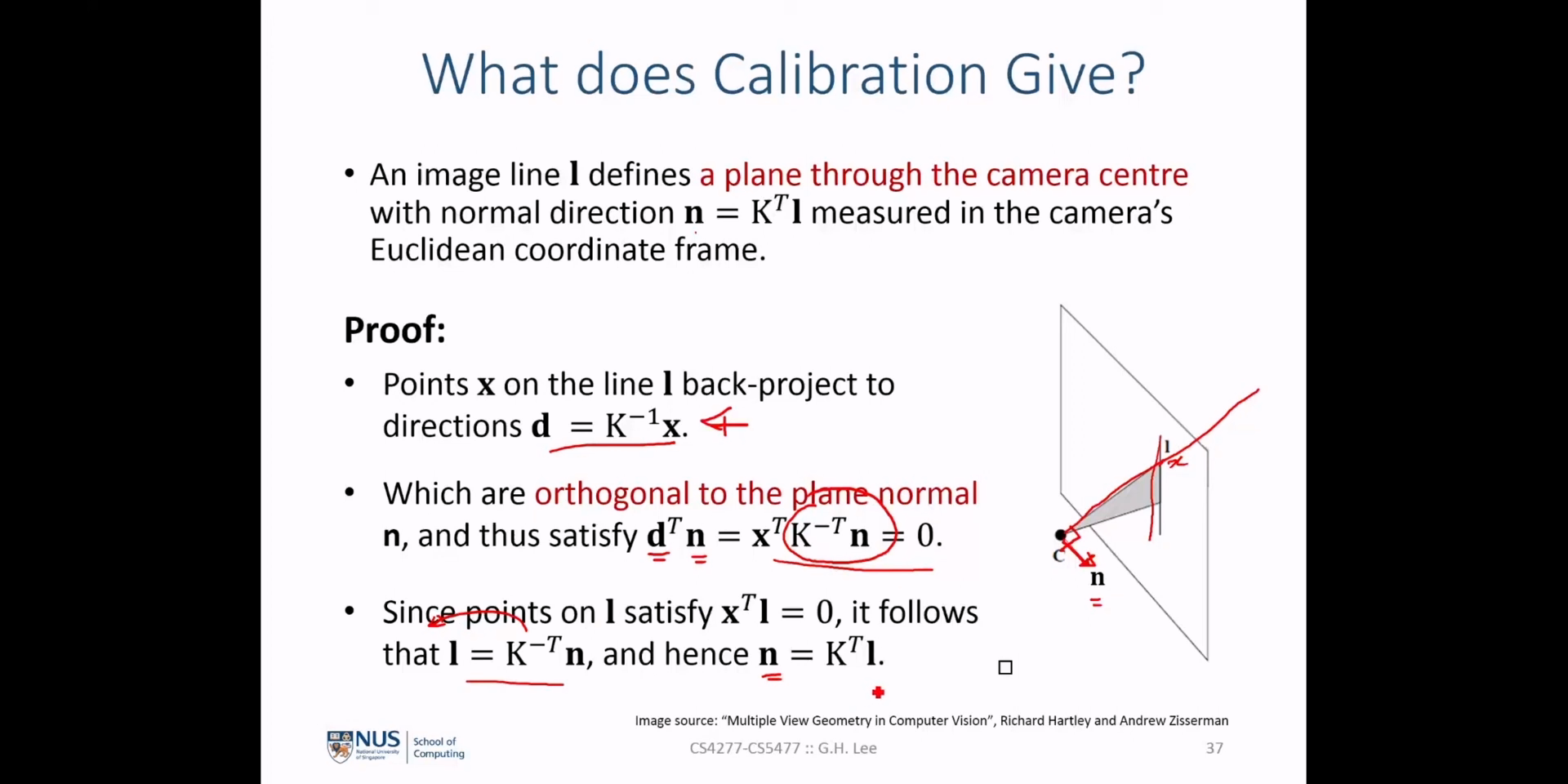
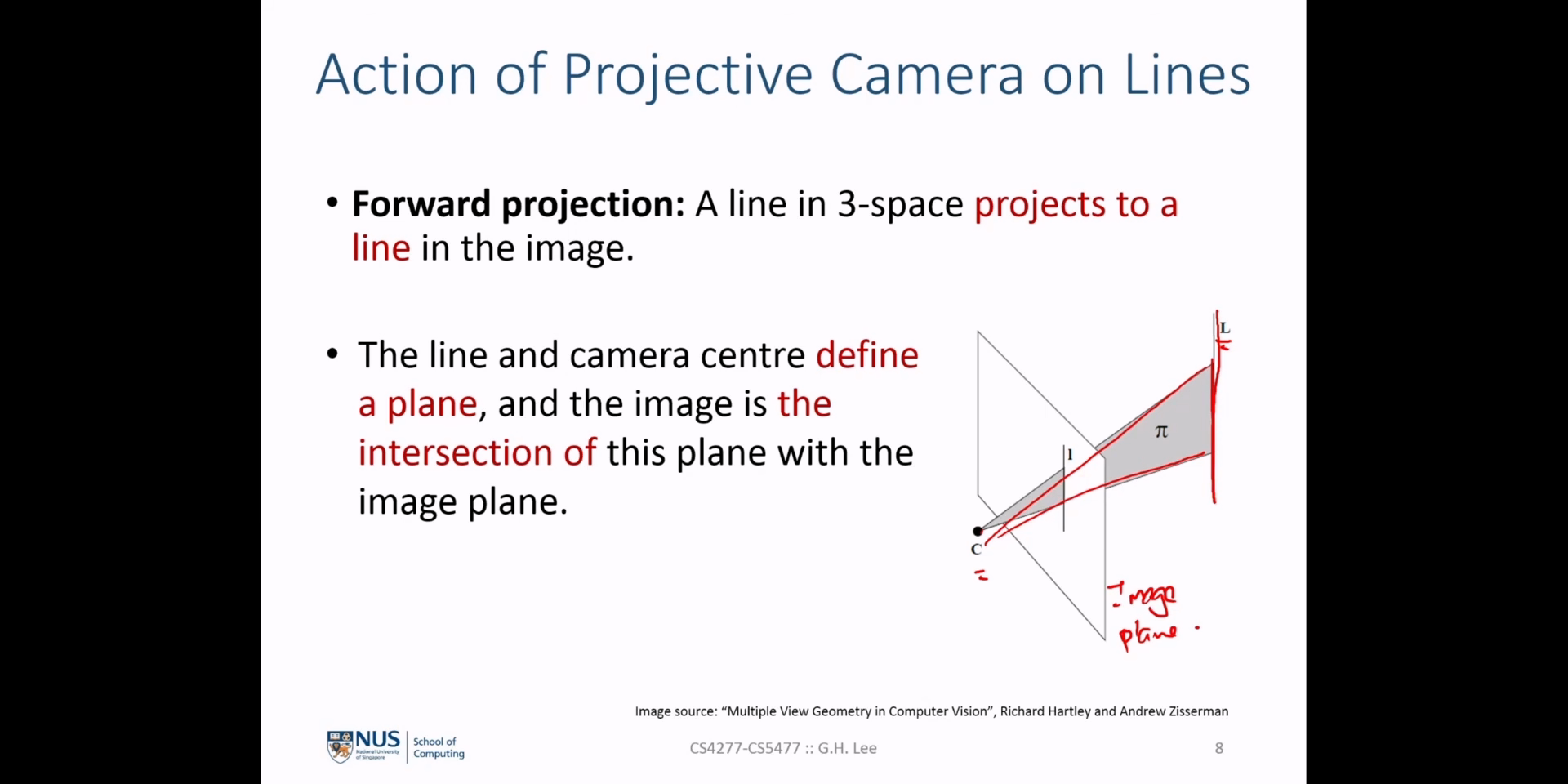
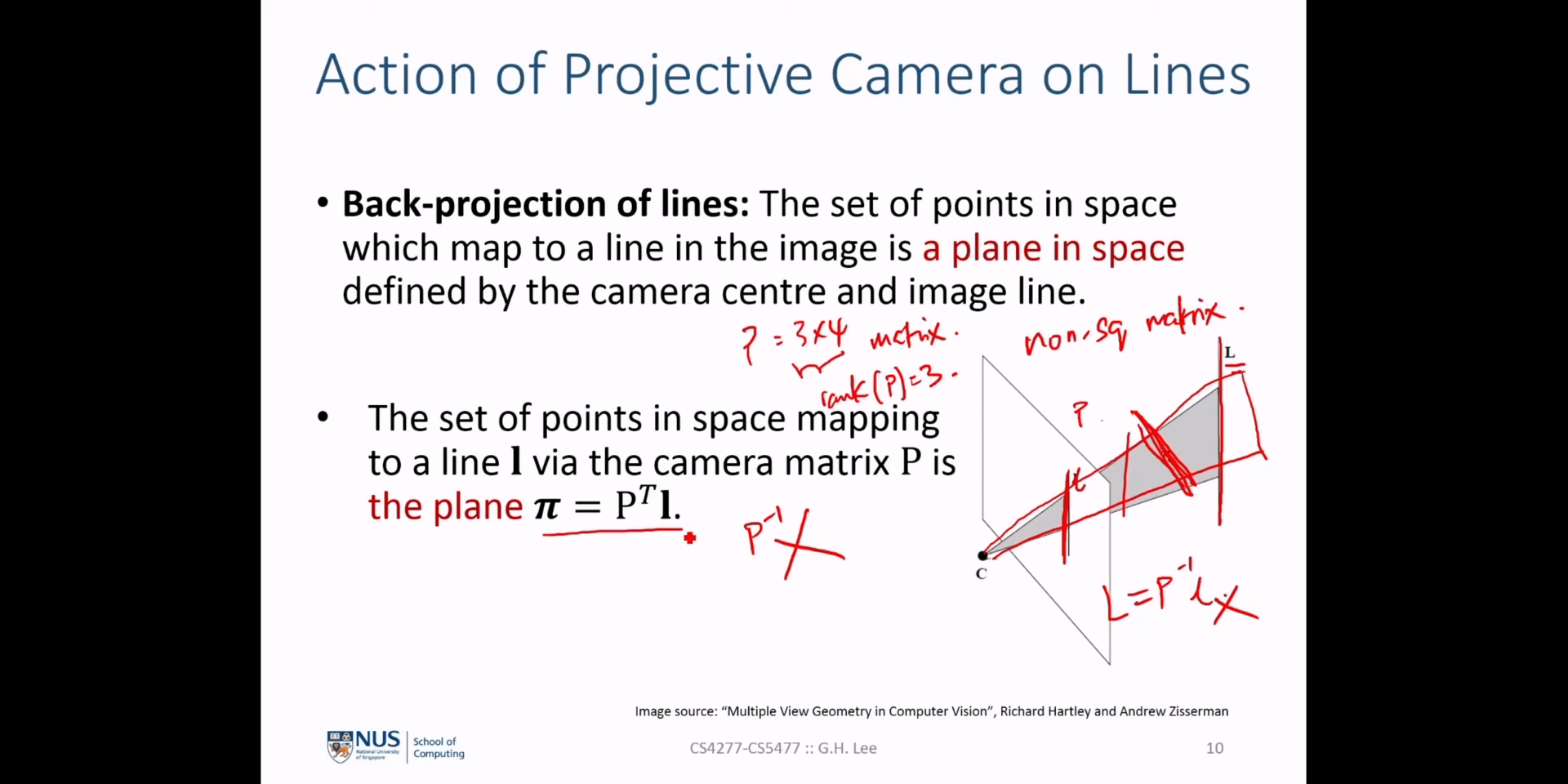
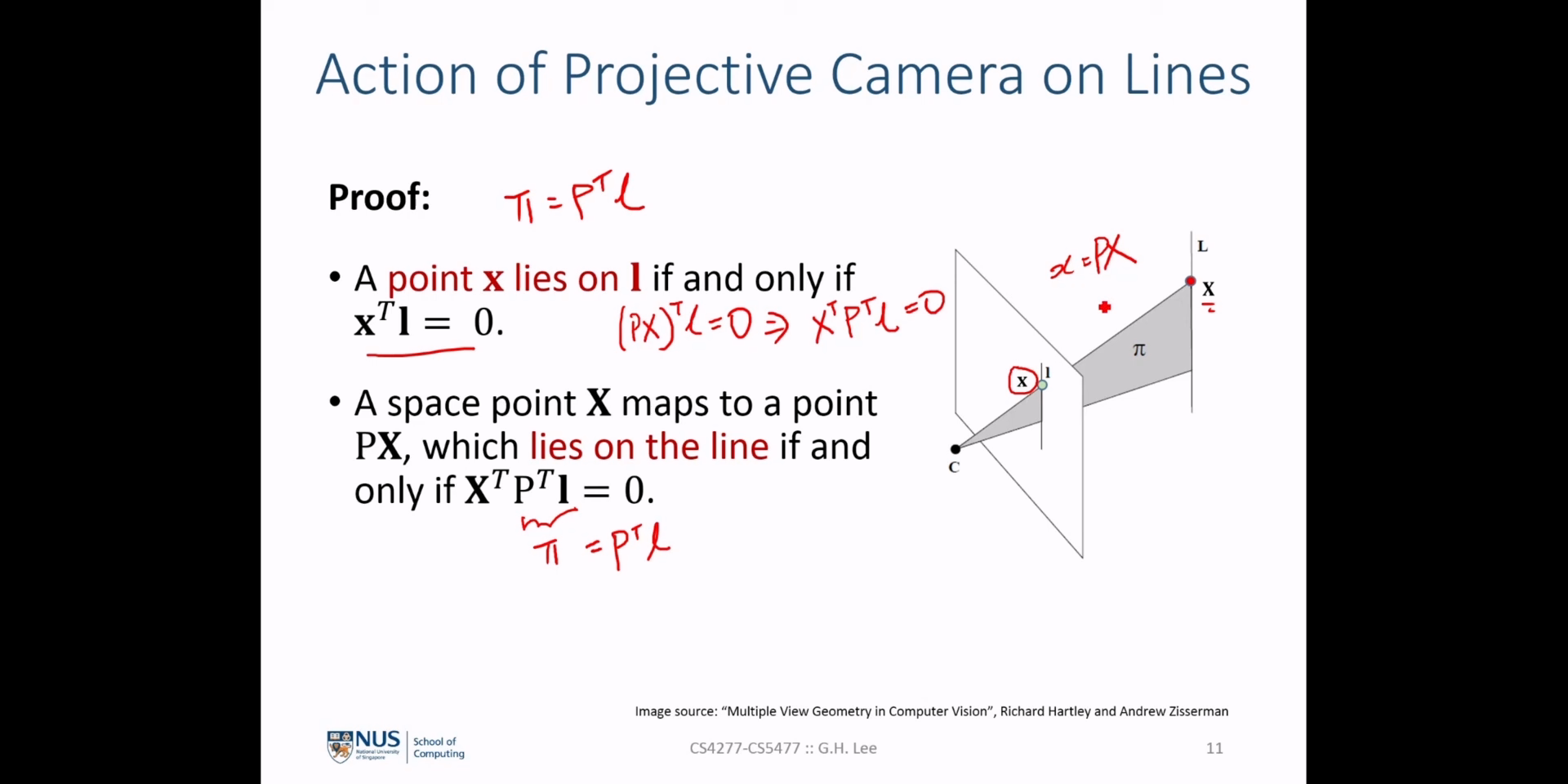
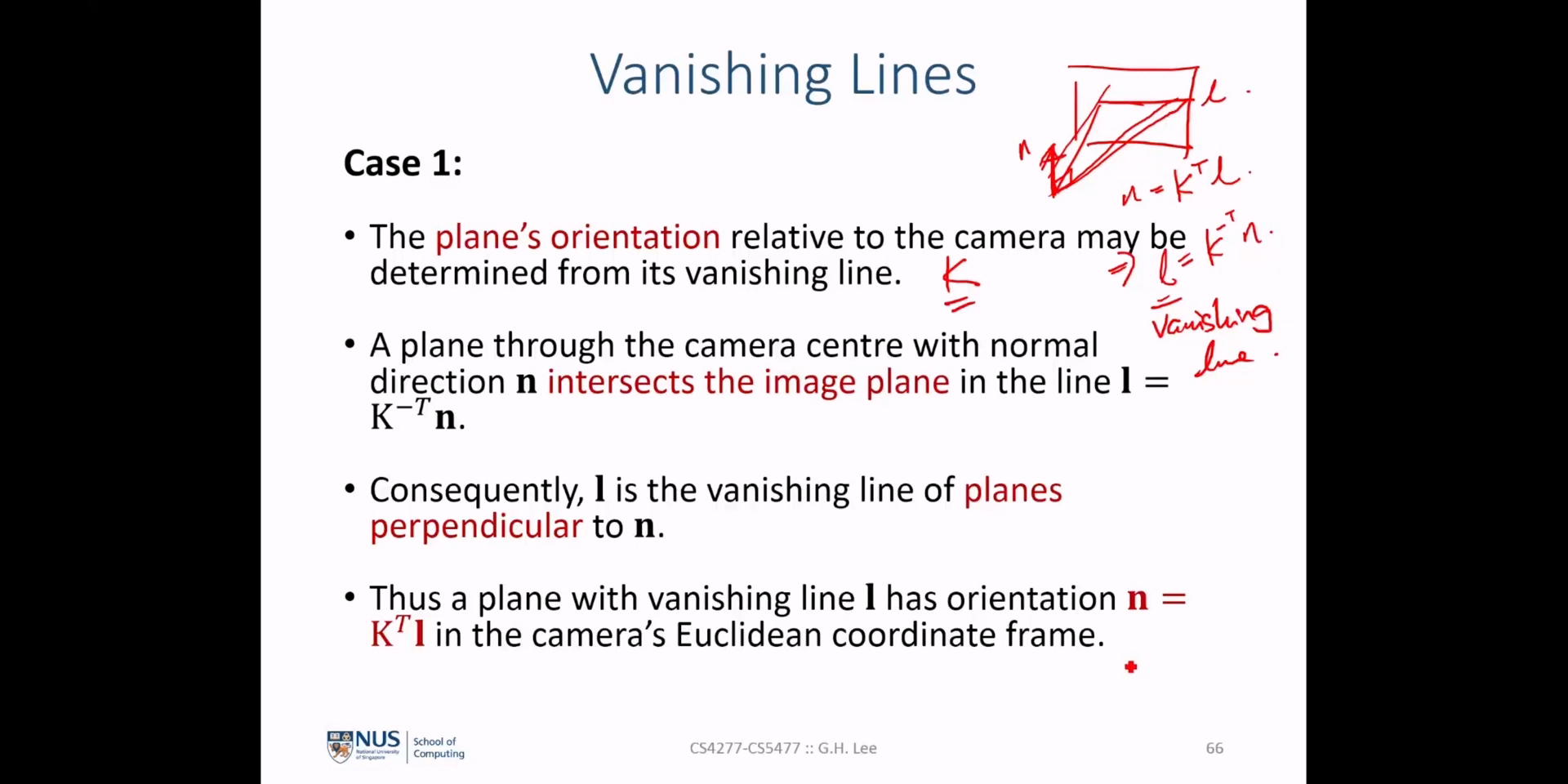
- 위 슬라이드에서는 이미지 상의 선 \(l\) 을 구성하기 위해 카메라 센터 \(c\) 로 부터 나온
ray인 \(d\) 전체와 직교한 방향의 벡터 \(n\) 은 \(n = K^{T} l\) 로 정의 됨을 보여줍니다.
- 먼저 앞에서 살펴본 바와 같이 이미지 상의 선 \(l\) 의 점을 \(x\) 는 다음과 같이
back-project됩니다.
- \[d = K^{-1}x\]
ray\(d\) 는 위 그림과 같이 \(n\) 벡터에 직교하므로 다음과 같이 전개할 수 있습니다. 아래 식은 직교한 벡터의dot product는 0임을 이용한 것입니다.
- \[d^{T}n = x^{T}K^{-T}n = 0\]
- 선 \(l\) 상에 존재하는 점 \(x\) 에 대하여 \(x^{T}l = 0\) 을 만족합니다. 따라서 식을 다음과 같이 전개할 수 있습니다.
- \[x^{T}K^{-T}n = x^{T}l = 0\]
- \[K^{-T}n = l\]
- \[\therefore n = K^{T}l\]
- 따라서 2D 이미지에서 선을 찾았을 때, 그 선을 구성하는 ray 전체와 직교하는 3D 공간상의
normal vector를 찾는 데 \(K\) 를 사용할 수 있음을 확인하였습니다. 이와 같은 정보를 이용하면2D 이미지 상의 선을 통해 3D 공간 상의 기하 정보를 추정할 수 있습니다.
- 지금부터는
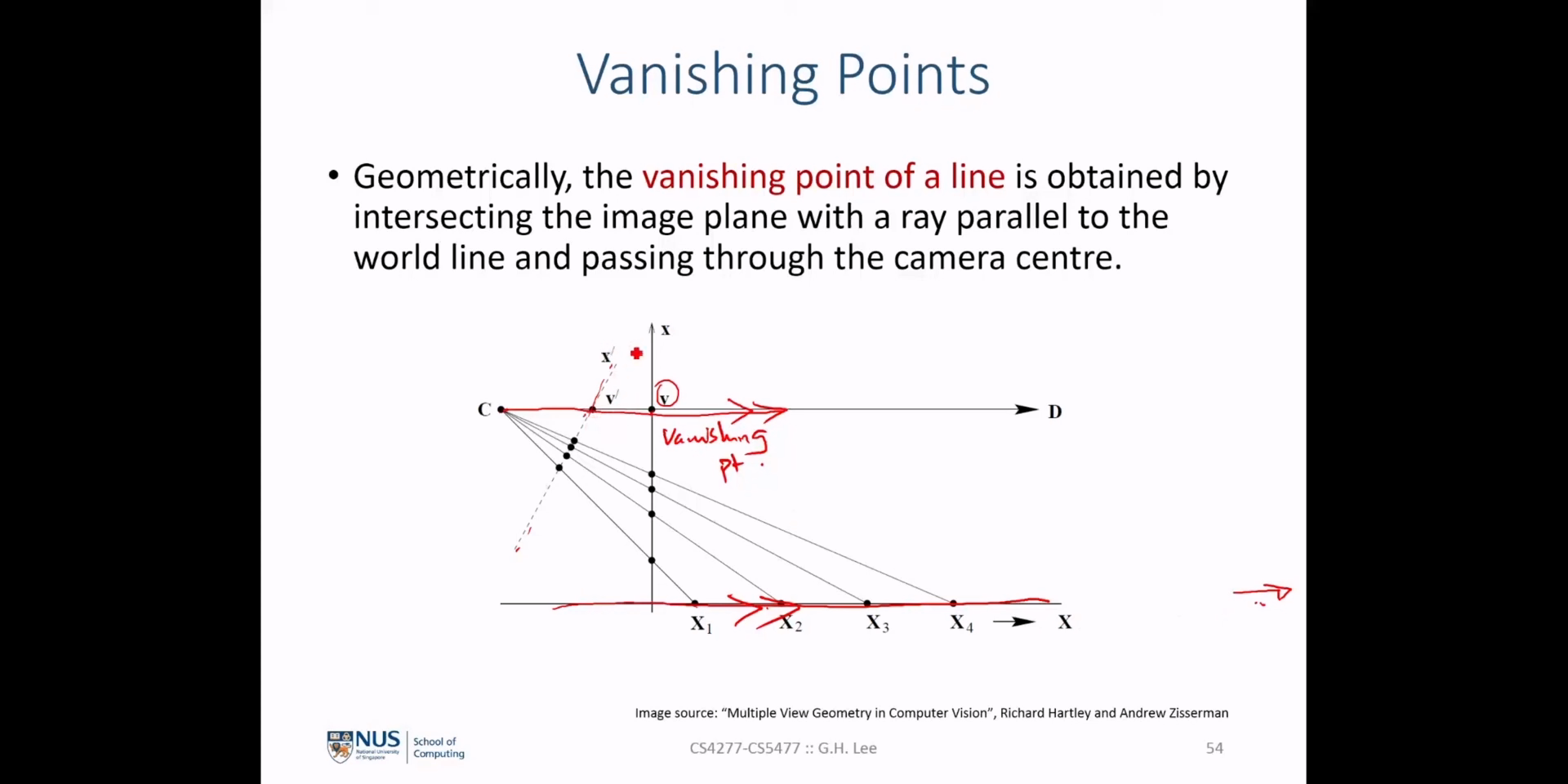
Vanishing Points와Vanishing Lines에 대하여 살펴보도록 하겠습니다. - 위 그림에서 \(C\) 는 카메라의 중심으로 \(C\) 의 위치는 움직이지 않고 카메라가 바라보는 방향만 위 아래로 움직이는 것을 나타냅니다.
- 또한 위 그림에서 가로 방향의 \(X\) 축은
world상의 3D 공간 좌표를 의미하고 \(D\) 축은 2D 공간 상의 무한 (infinity) 평면에 해당합니다. world상의 점 \(X_{1}, X_{2}, X_{3}, X_{4}\) 는 동일한 간격을 두고 점점 멀어지도록 표현되어 있습니다.- 위 그림에서 \(X\) 와 직교하는 실선의 세로 축과 비스듬한 점선의 세로 축 2개가 표현되어 있습니다. 카메라 중심 \(C\) 로부터 \(X_{1}, X_{2}, X_{3}, X_{4}\) 까지 뻗은 직선과 세로 축의 교점들이 이미지에서의 \(X_{1}, X_{2}, X_{3}, X_{4}\) 의 위치를 나타냅니다.
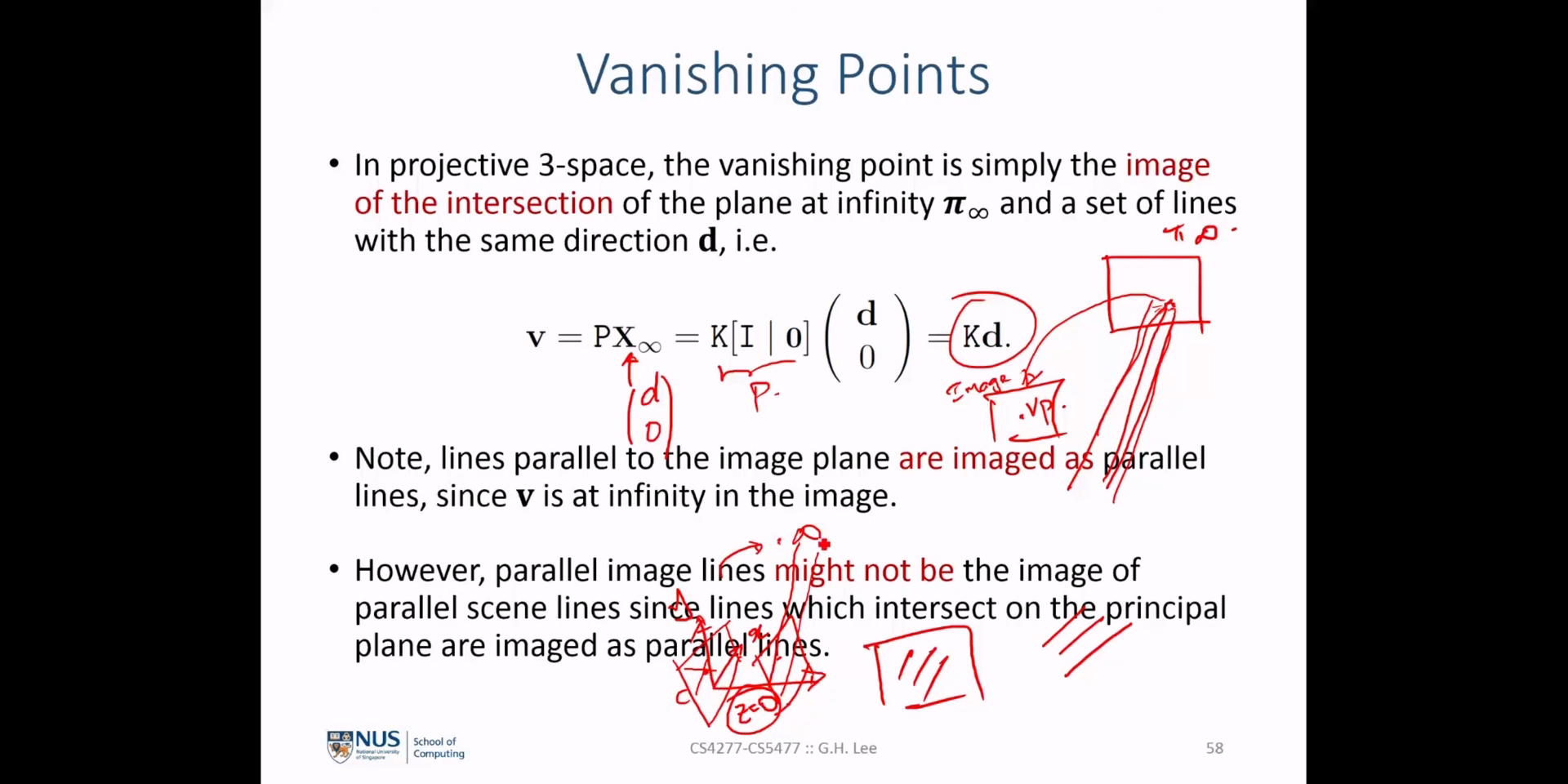
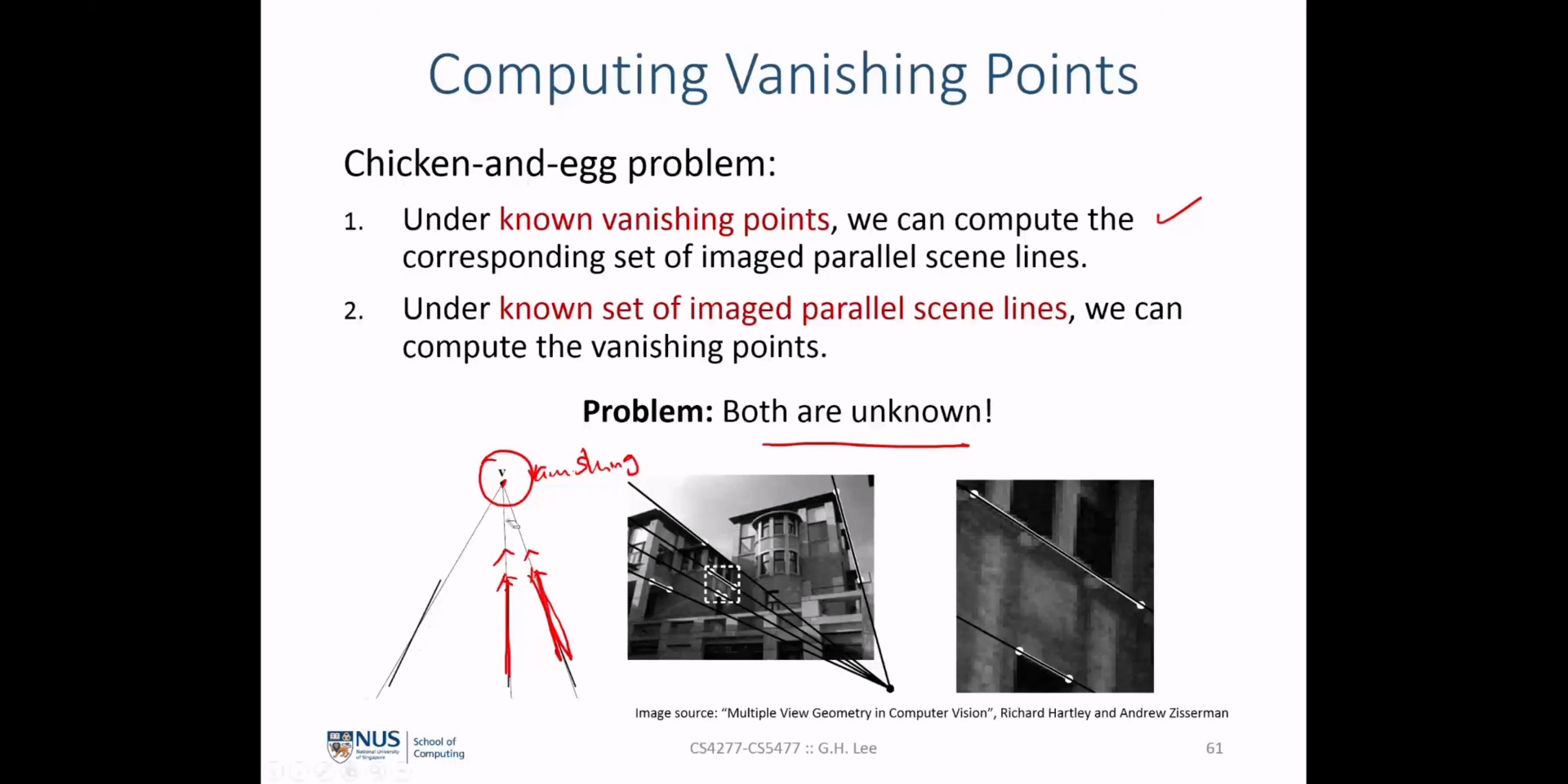
world상에서 \(X_{1}, X_{2}, X_{3}, X_{4}\) 는 등간격으로 나타내어진 반면에 이미지 상에서는 점점 간격이 좁아지게 되는데 이는원근법(Perspective View)이 적용되었기 때문입니다. 따라서world상에서 멀리 존재하는 점들이 빽빽하게 모여있게 됩니다. vanishing point는world상의 점 \(X_{\infty}\) 가 무한히 먼 곳에 존재할 때 이미지에 대응되는 점을 의미합니다. 위 그림에서는 \(v\) 와 \(v'\) 가 각각vanishing point에 해당합니다.- 위 그림에서 주목할 점은 같은 점이라도 카메라가 바라보는 방향에 따라 vanishing point의 위치가 다르다는 점입니다.
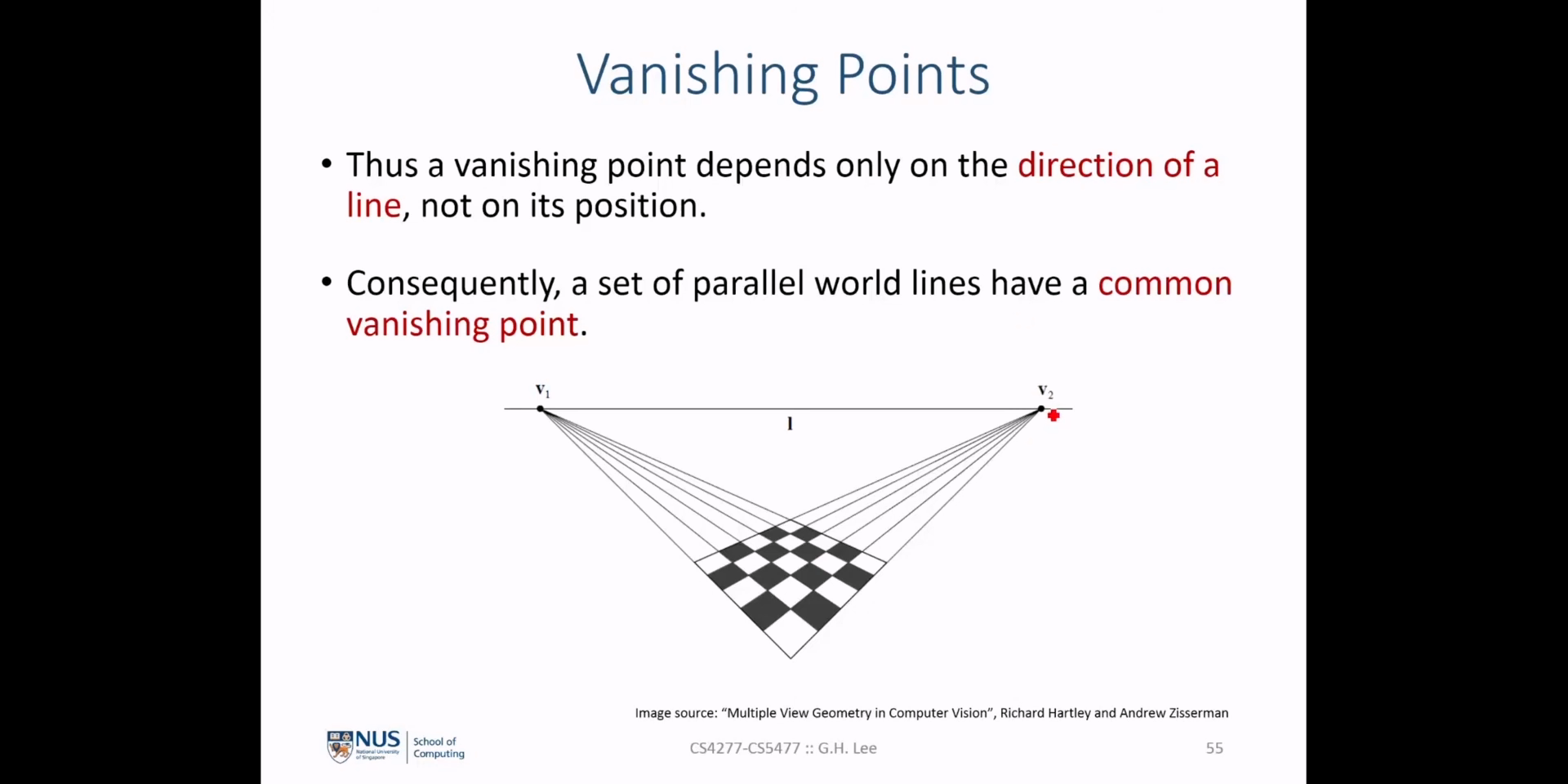
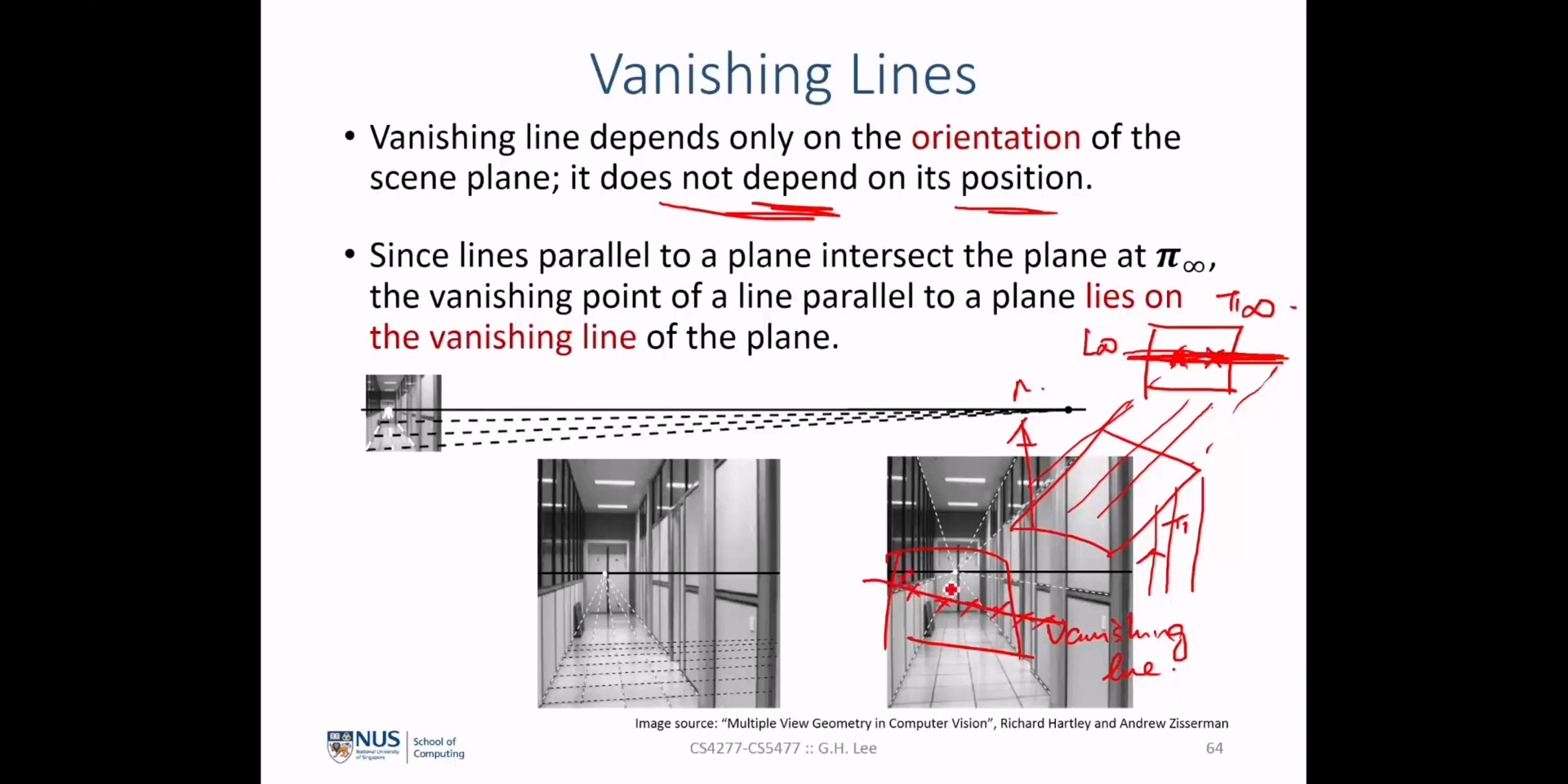
vanishing point는 위 그림과 같이direction of a line에 의해 영향을 받는 것이지line의 위치 (position)와는 무관합니다.
- 위 그림과 같이
line의 위치는 다르더라도line이world상에서 모두 평행하다면 같은vanishing point를 가지게 됨을 알 수 있습니다. - 54 페이지에서는 같은
world상에서의 점에 대해서 카메라가 바라보는 위치가 달라지면vanishing point의 위치가 바뀌는 것을 보여주었고 55 페이지에서는 평행한 선의vanishing point가 모두 같은것을 보여주었습니다. 둘 다 같은 의미를 다른 방식으로 보여준 것이며 중요한 것은vanishing point의direction of a line에 의해 결정된다는 것입니다. - 55 페이지에서의 \(l\) 은
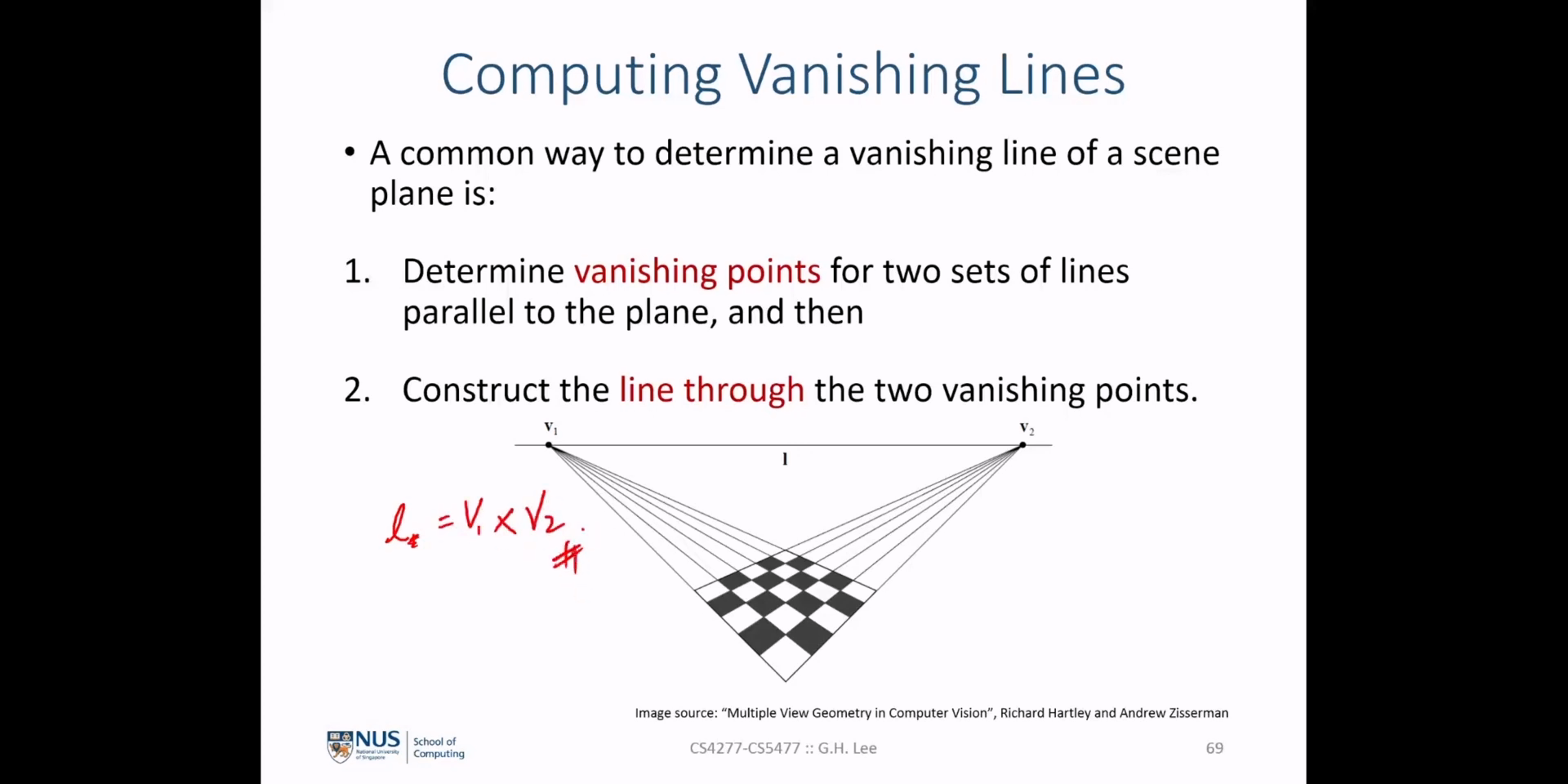
vanishing line을 의미합니다. 2개의vanishing point를 구하면 그 점을 이용하여vanishing line을 구할 수 있습니다.
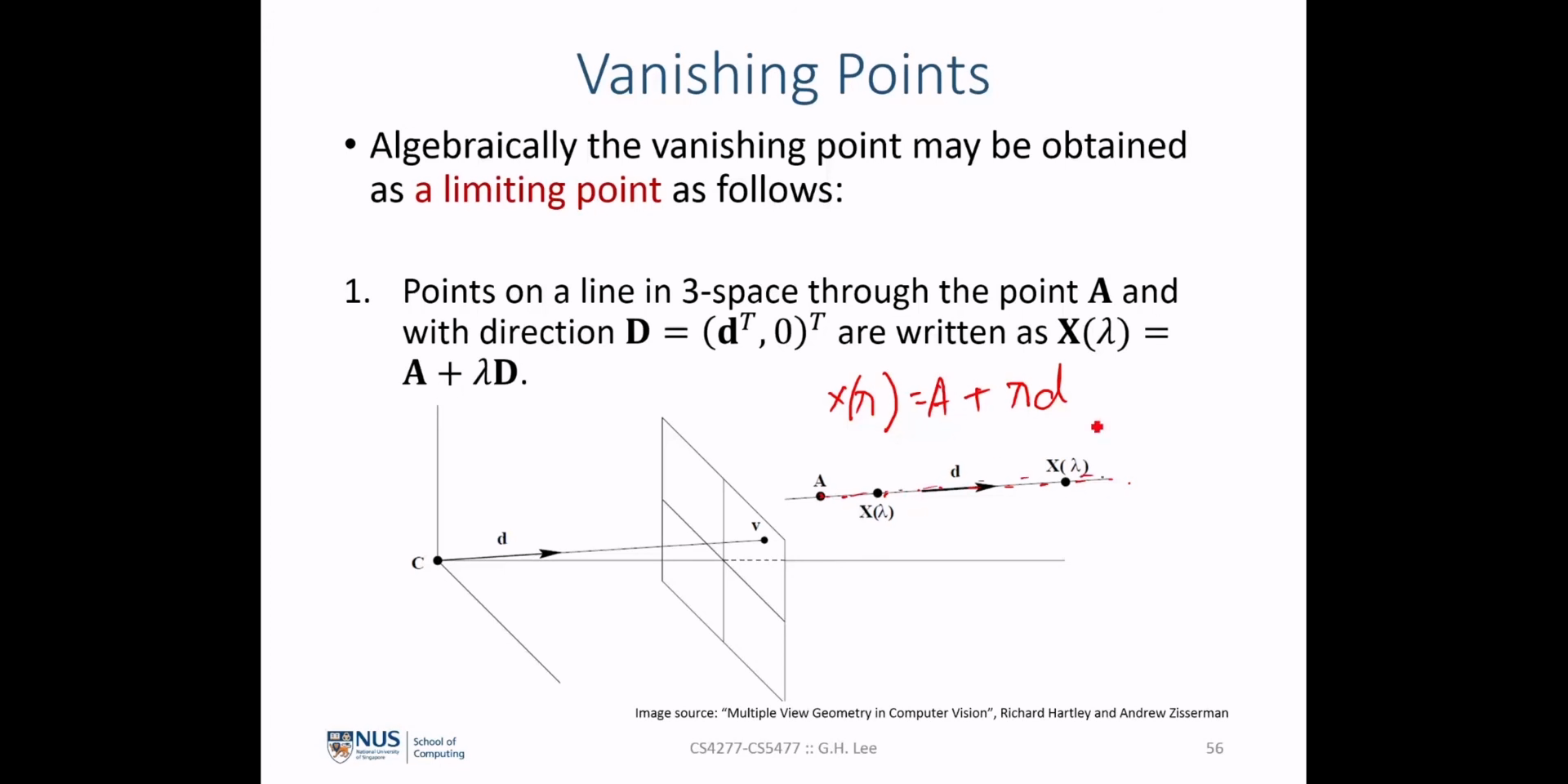
- 이번 슬라이드에서는 대수적으로
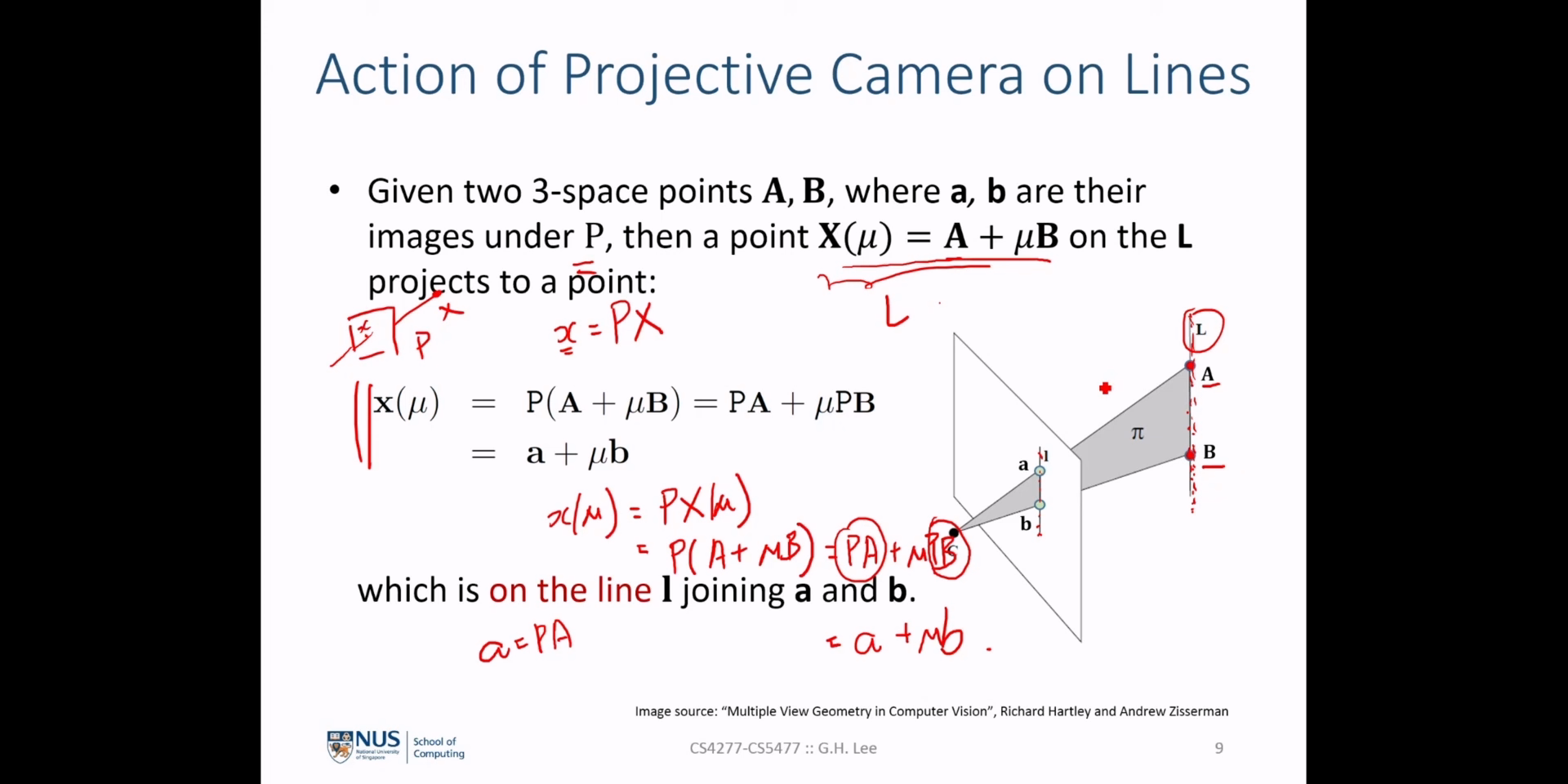
vanishing point에 대한 정의를 내려 보도록 하겠습니다. - 위 그림에서 \(C\) 는 카메라의 중심이고 3D 공간상의 어떤 점 \(X(\lambda)\) 는 \(X(\lambda) = A + \lambda D\) 로 정의 됩니다. 임의의 점 \(A\) 에서 \(D\) 의 방향과 크기 만큼 이동하였을 때 생기는 점을 의미합니다.
- 위 식에서 \(D = (d^{T}, 0)^{T}\) 에서 \(d\) 는 3D 벡터를 의미합니다. homogeneous coordinate에서 벡터를 나타내므로 마지막 차원의 값이 0이 되어 homogeneous 상의 벡터로 나타낼 수 있습니다.
- 따라서 임의의 3D 상의 점 \(X(\lambda) = A + \lambda D\) 로 나타낼 수 있습니다.
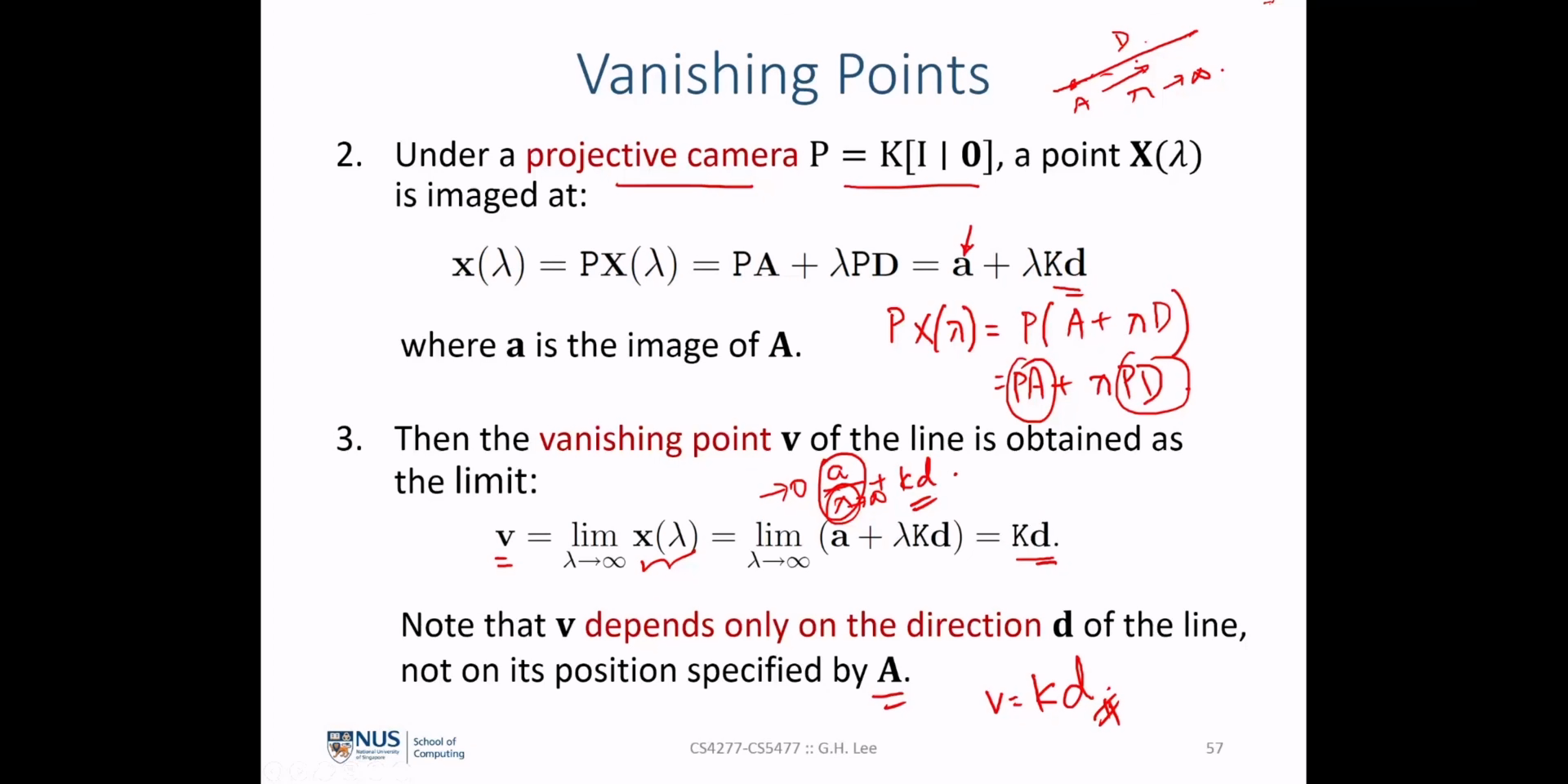
- 앞에서 정의한 \(X(\lambda)\) 에
Projection Matrix인 \(P\) 를 적용해 보도록 하겠습니다. - 앞에서 다루온 바와 같이 \(P = K[I \vert 0]\)
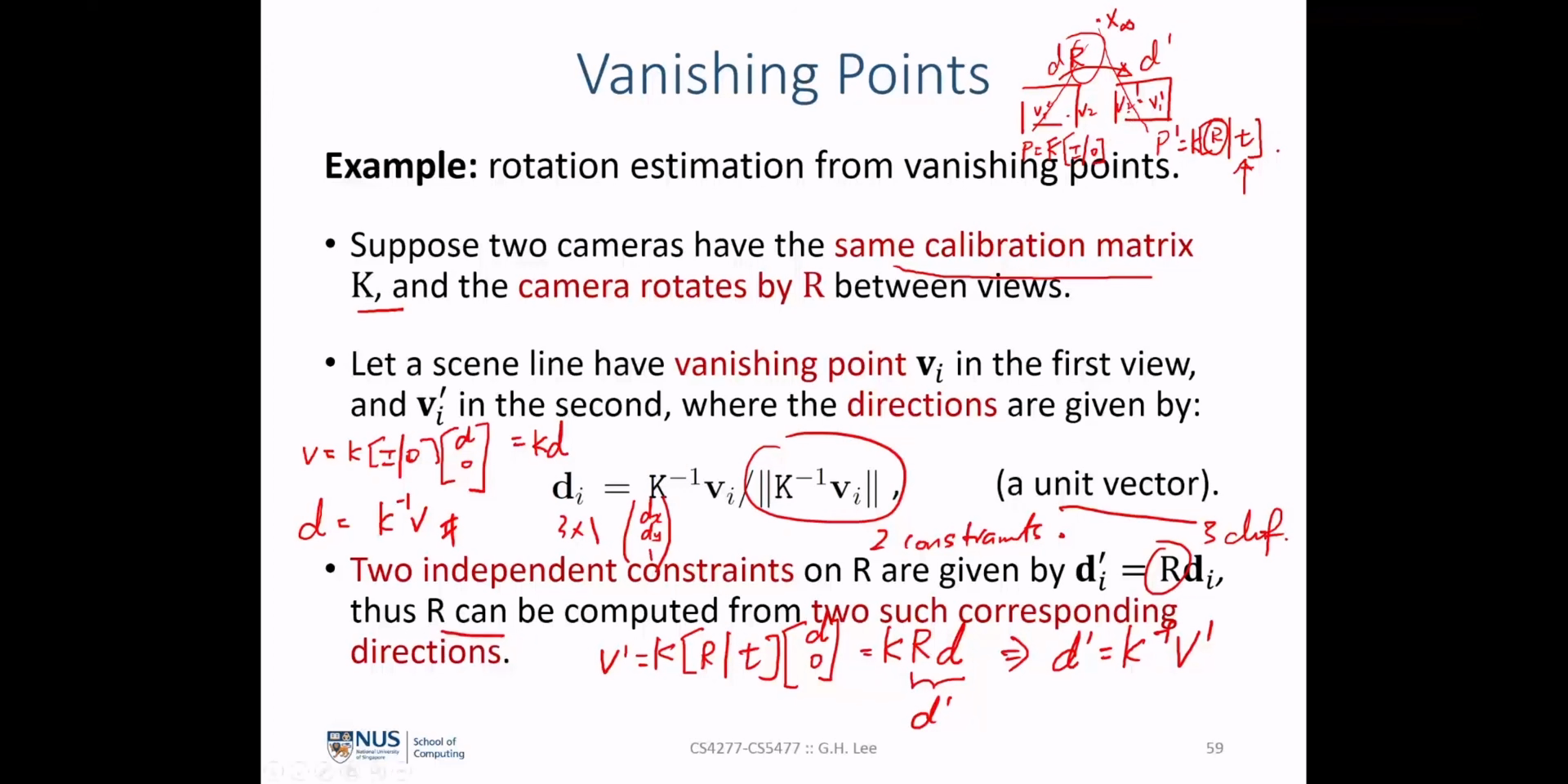
회전행렬의 자유도는 3이므로 2개 이상의 vanishing point 쌍을 사용하면 회전행렬을 복원할 수 있습니다.

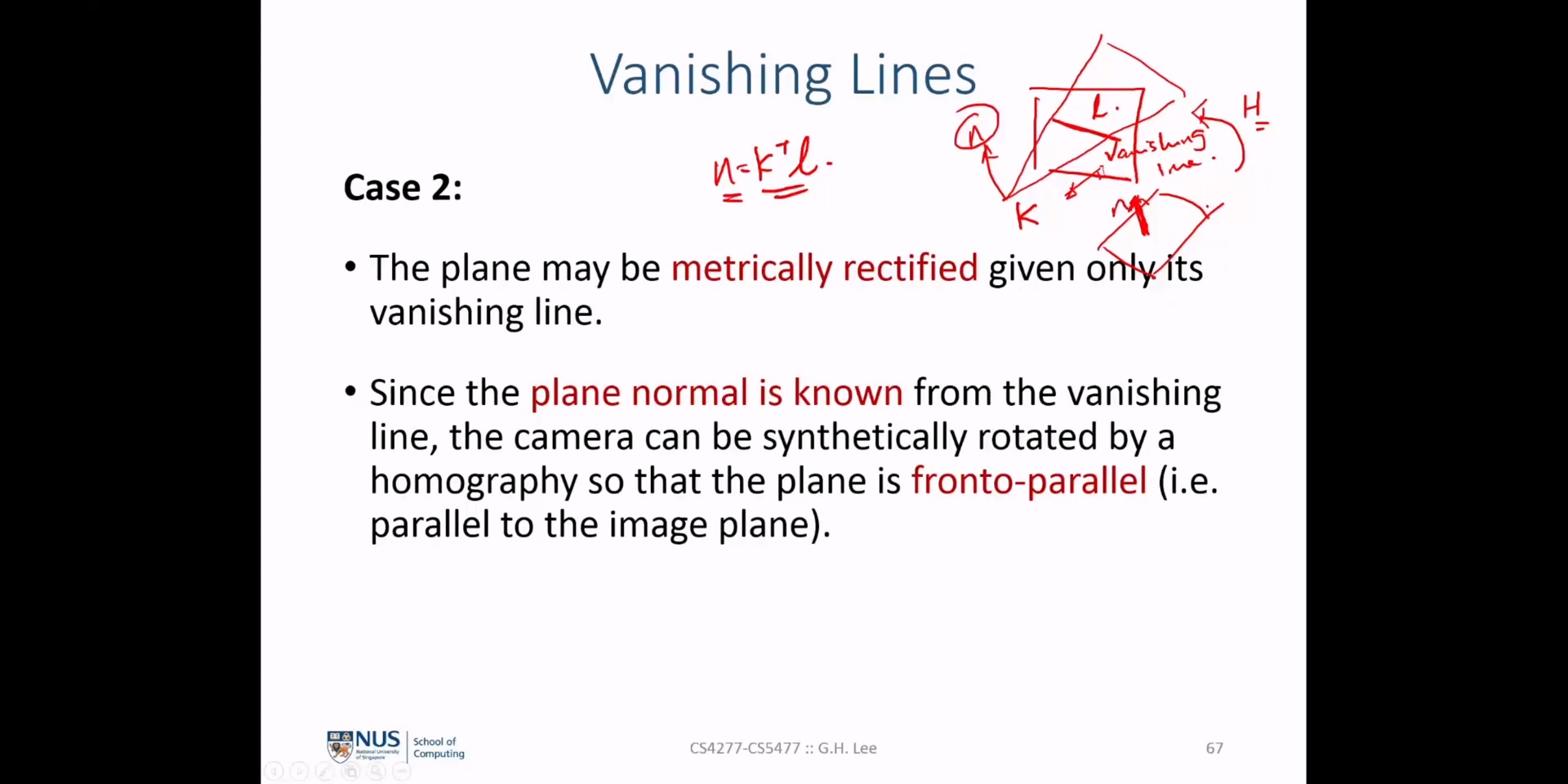
metric rectification은 이미지에서perspective view로 인하여 수직 성분이 왜곡되어 이미지 상에서 형성된 것을 다시 수직 형태로 복원하는 과정을 의미합니다.
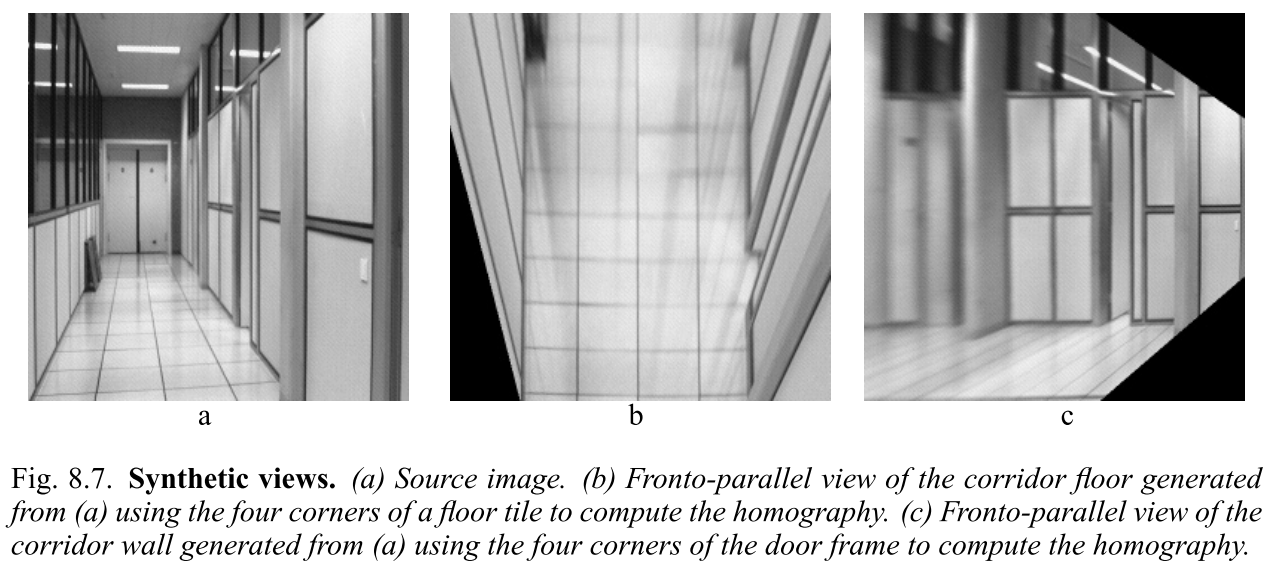
- 앞에서 다룬 그림을 다시 살펴보겠습니다. 위 그림에서 (b), (c)가 (a)를
metric rectification하여 수직 성분을 복원한 예시입니다. 그림에서도 (b), (c)를Front-Parallel로 표현할 것을 확인할 수 있습니다.
- 지금까지 살펴본
vanishing point와vanishing line에 대하여 정리해 보면 다음과 같습니다. vanishing point와vanishing line3D 공간 상의 위치와는 무관하고 방향에만 관계가 있습니다.vanishing point는 3D 공간 상의 평행한 선들 (parallel scene lines)을 알 수 있으면 이미지 상에서 구할 수 있습니다.vanishing point를 활용하는 대표적인 예시로 ①intrinsic이 같은 2개의 카메라의Rotation을 구하는 것과 ② 2개의scene lines사이의 각을 구하는 것이 있었습니다.vanishing lines은 2개의vanishing point를 연결하여 구할 수 있고 ( \(l = v_{1} \times v_{2}\)) 또는 3D 공간 상의 평면과 \(\pi_{\infty}\) 의 교차선을 통하여 구할 수도 있습니다.- 특히 두번째 방법에서 3D 공간 상의 평면인
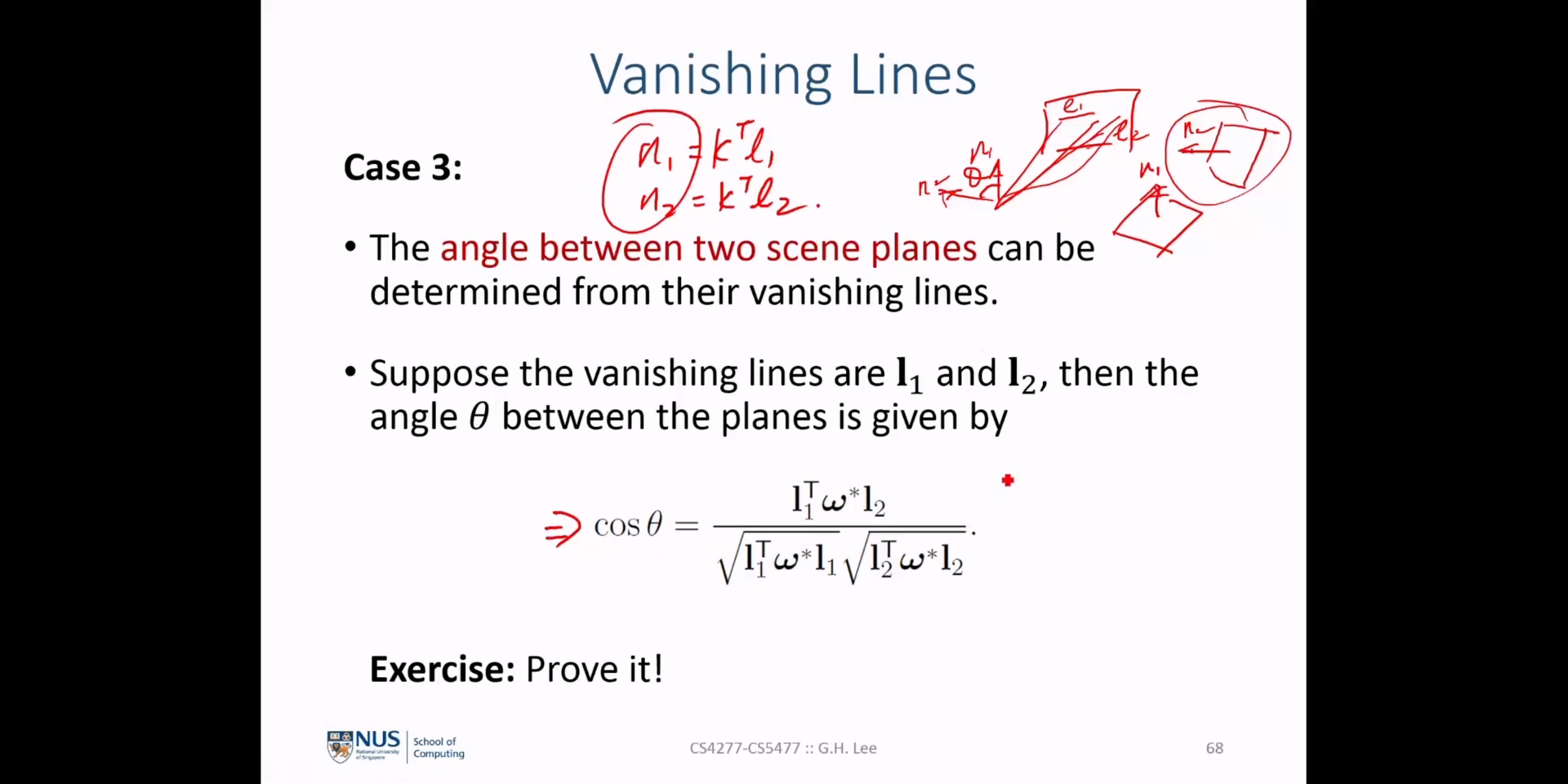
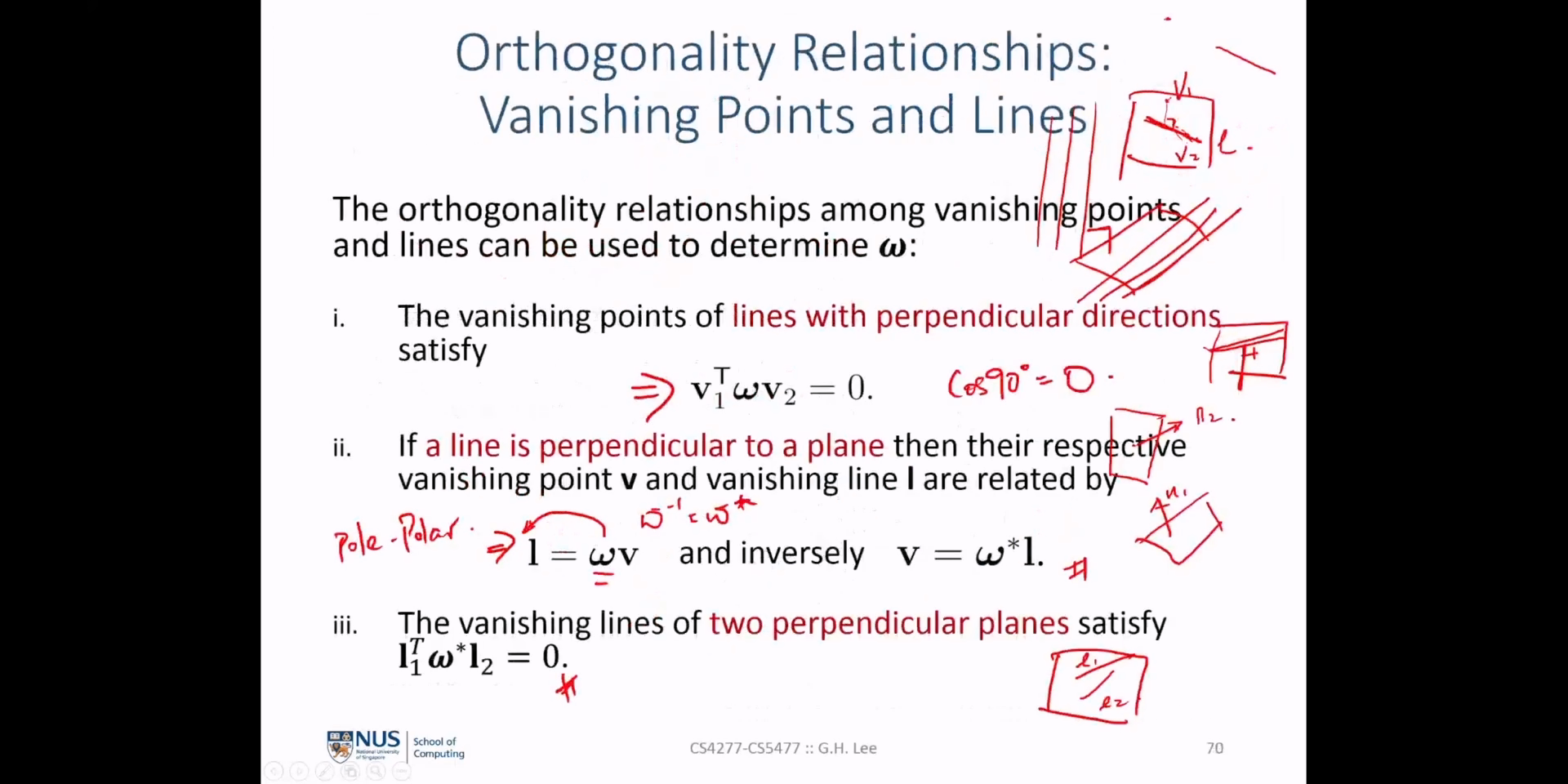
scene plane의normal vector인 \(n\) 을 \(n = K^{T}l\) 으로 구할 수 있습니다. 이 때, 어떤 \(n\) 값을 가지는scene plane들 중에서 카메라 센터를 통과하는scene plane이 이미지와 교차하는 선이vanishing line이 되는 것을 확인하였습니다. vanishing line을 이용하면 ①vanishing line을 생성하는scene plane의normal vector를 알 수 있다는 것과 ②metric rectification을 하는 데 이용할 수 있다는 점, ③ 2개의scene plane사이의 각도를 확인할 때 사용할 수 있다는 것을 확인하였습니다.
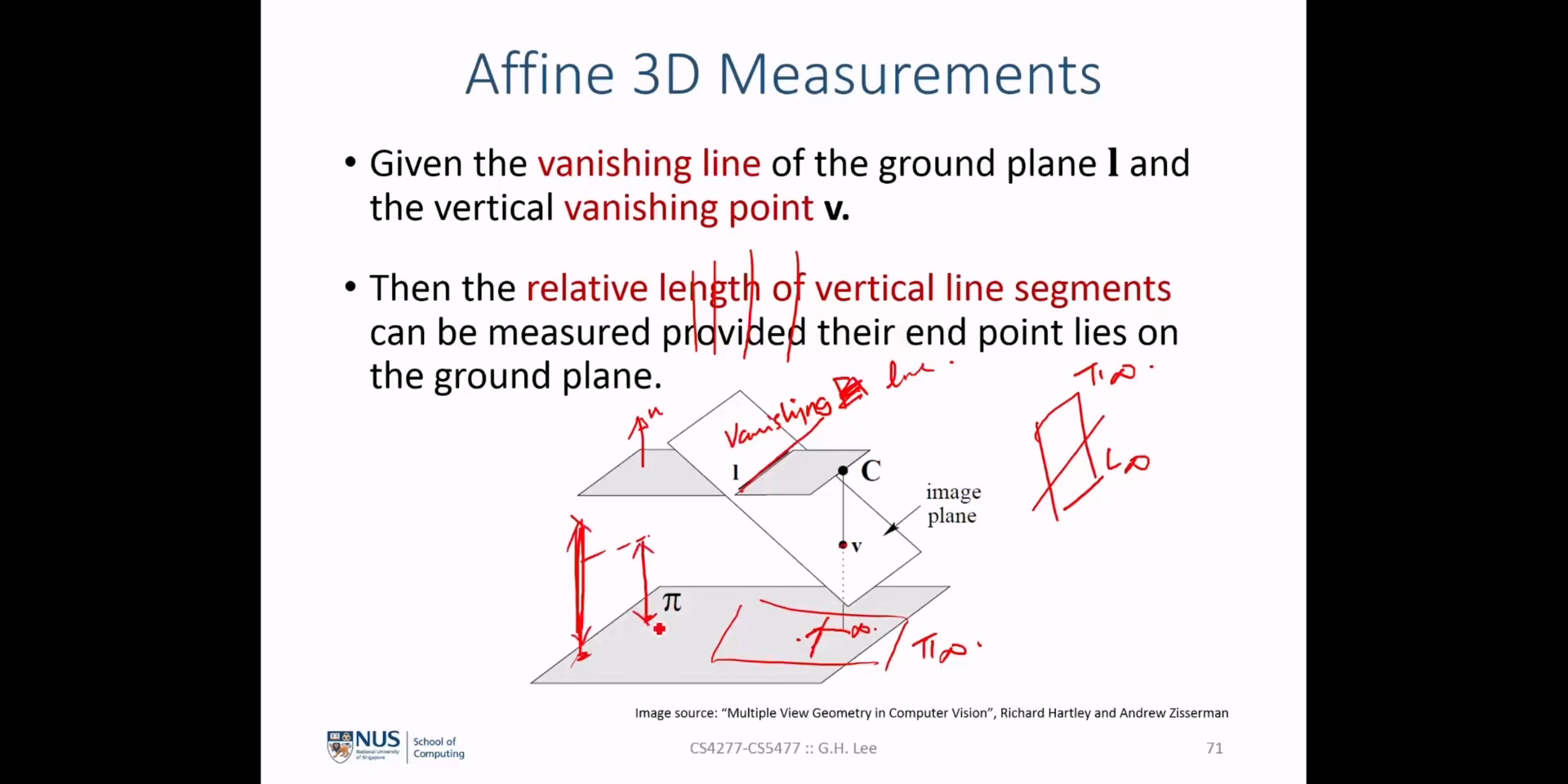
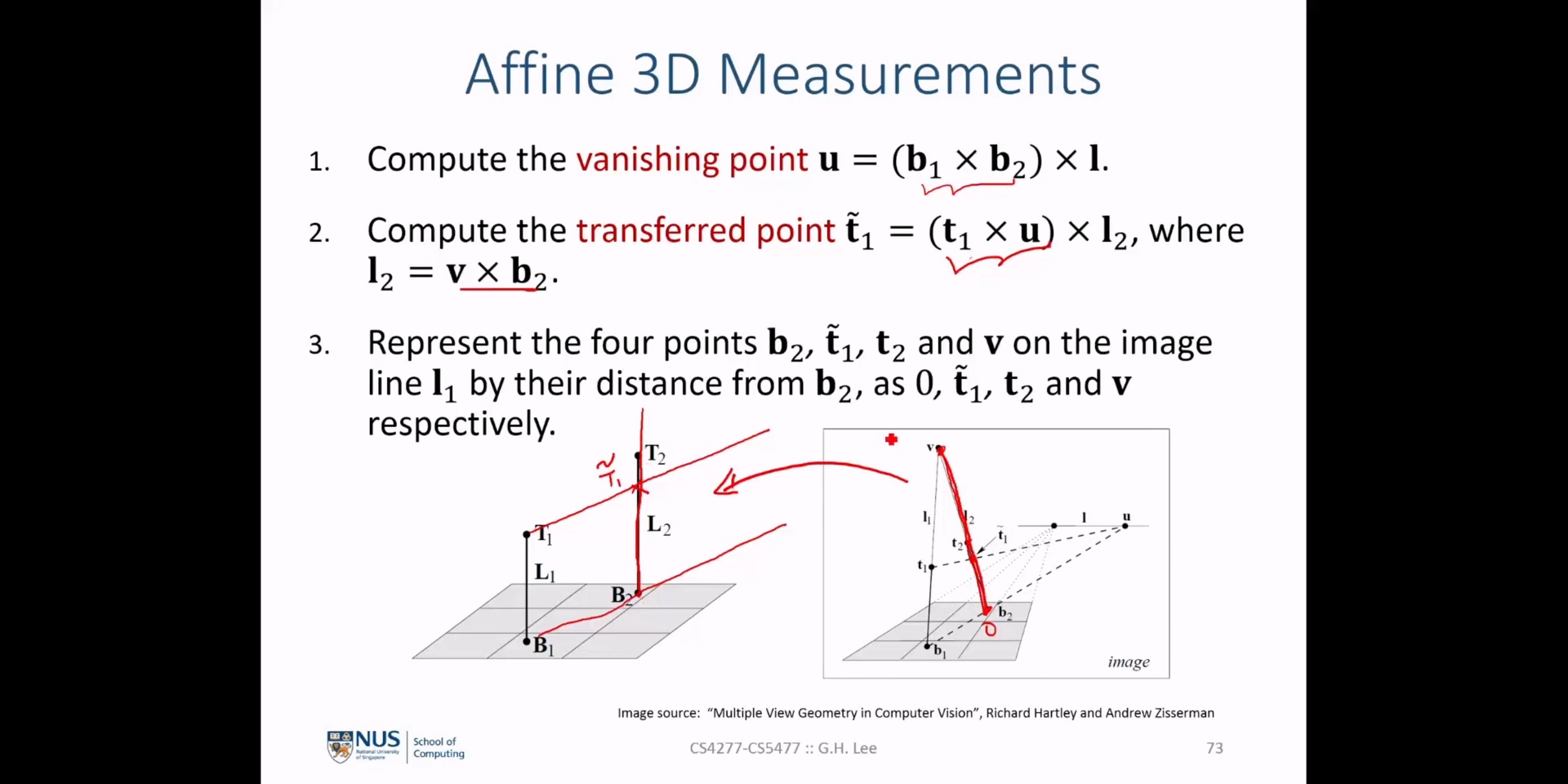
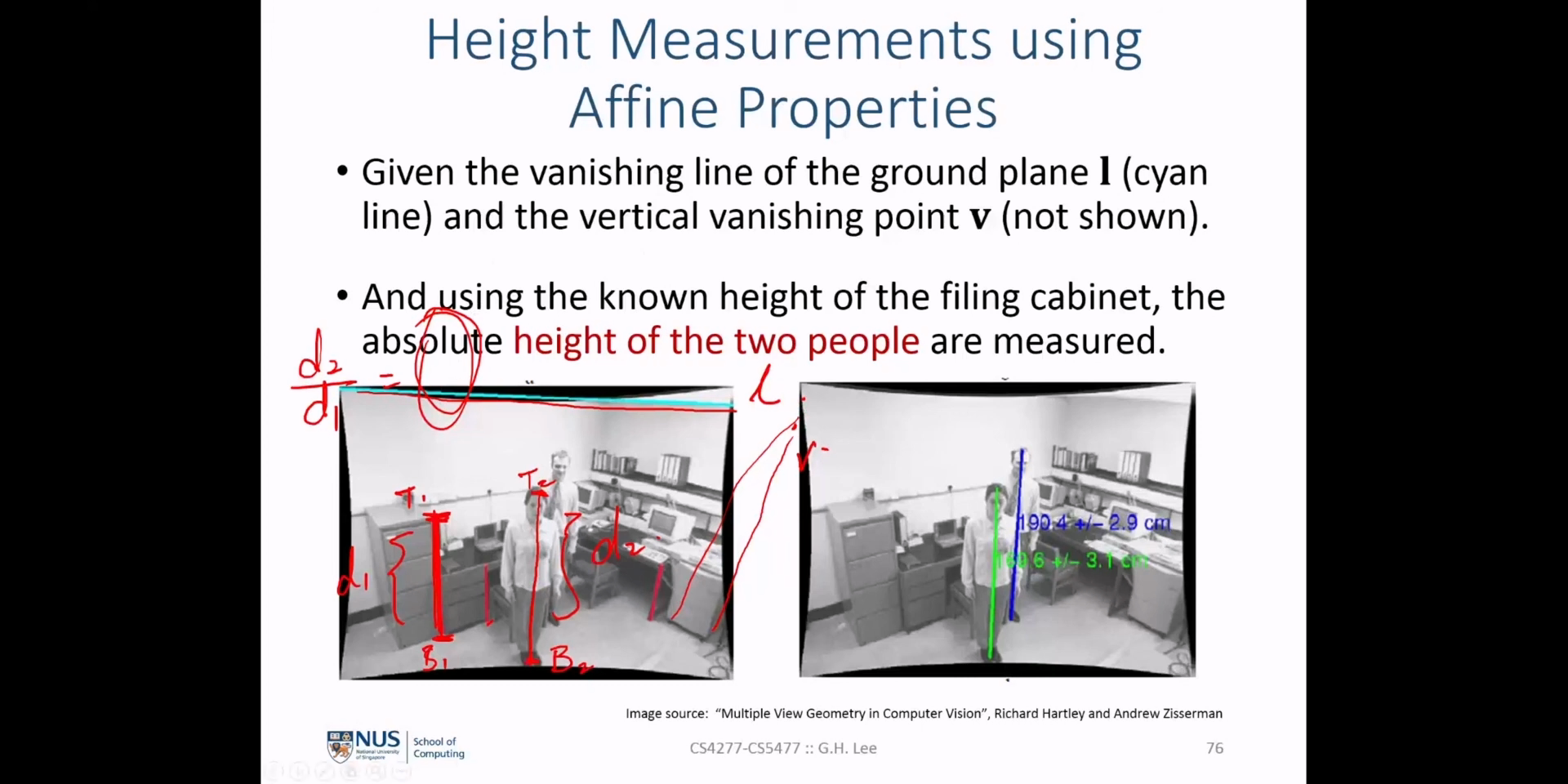
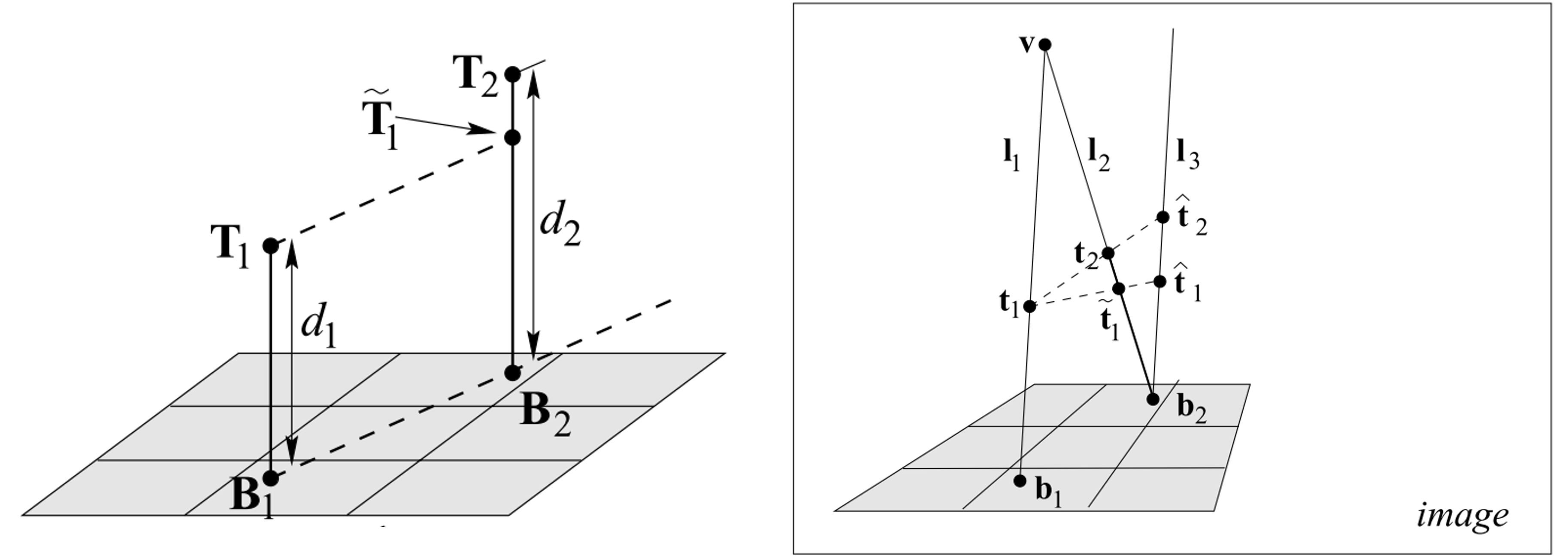
- 75p의 슬라이드 하단의 이미지를 아래 좀 더 선명하게 표현하도록 하였습니다.
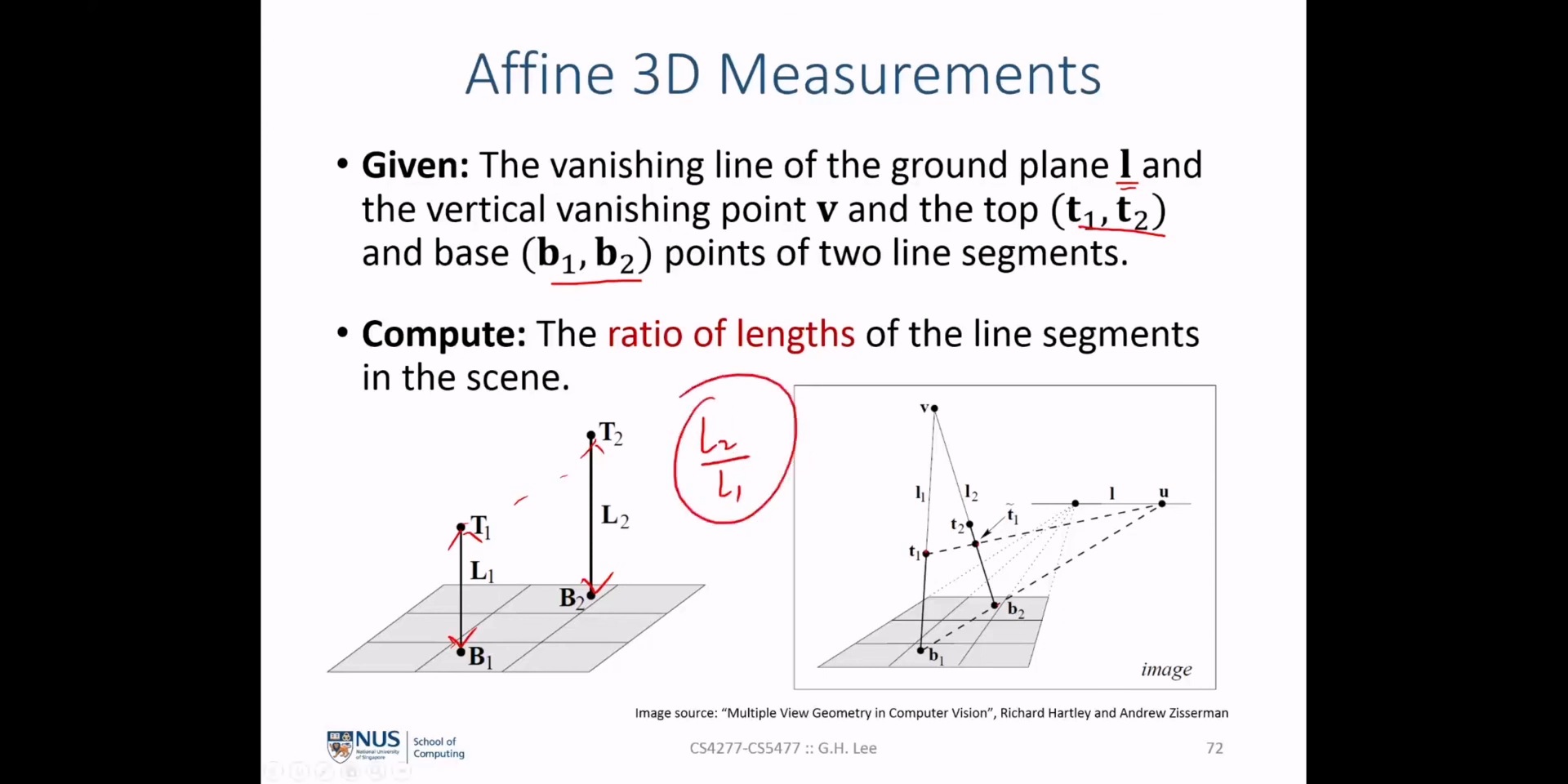
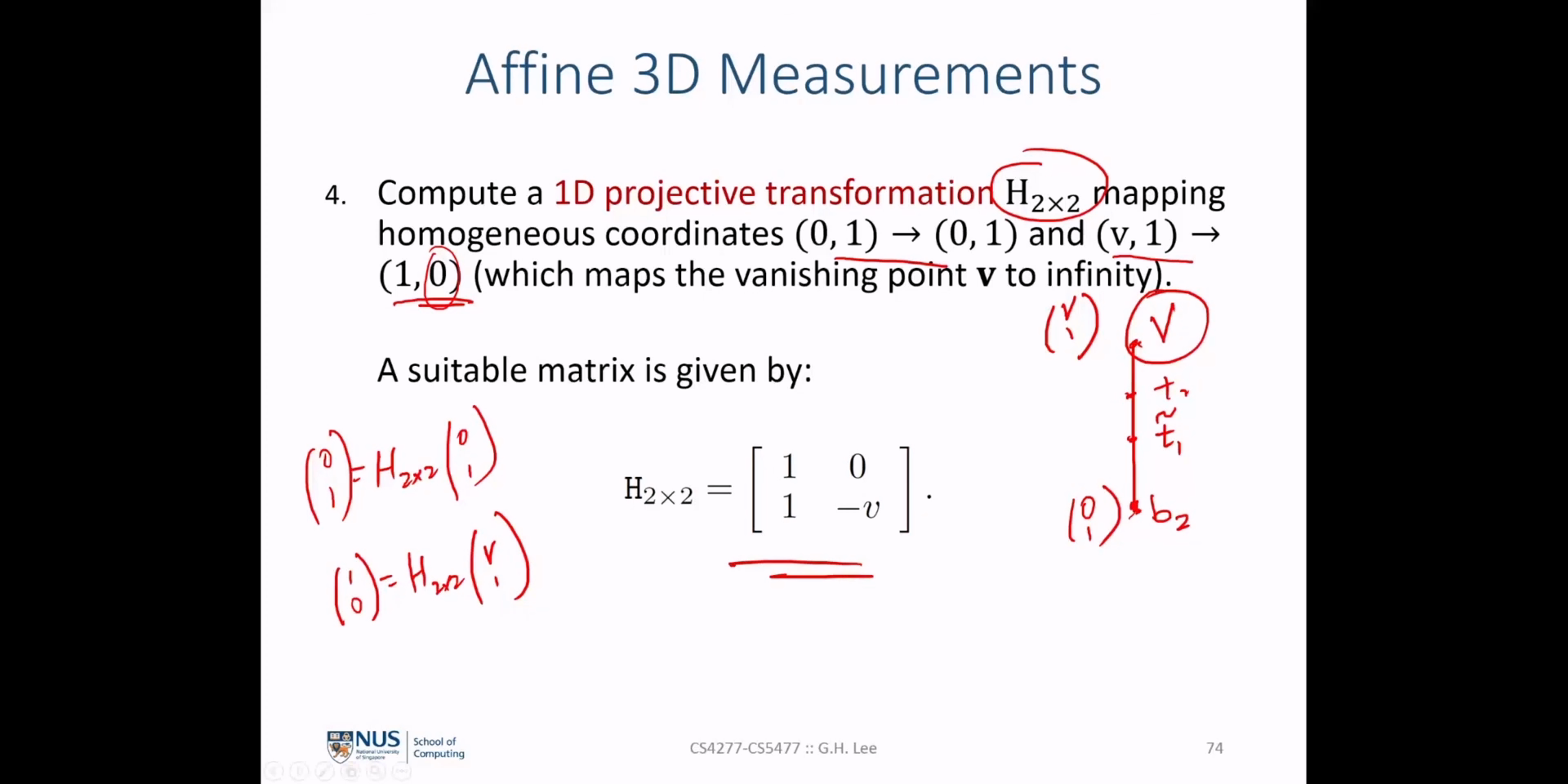
- 위 슬라이드에서는 \(H_{2 \times 2}\) 를 이용하여 오른쪽의
image에 존재하는 \(\tilde{t}_{1}\) 와 \(t_{2}\) 를 왼쪽의스케일 변환된 3D space에서의 \(\tilde{T}_{1}\) 와 \(T_{2}\) 로 대응 시키는 내용을 설명합니다. - 74p에서 정의된 \(H_{2 \times 2}\) 를 이용하면 이미지 상의 \(0 \approx v\) 범위의 높이 값을
3D space상에서 \(0 ~ 1\) 사이의 값으로 스케일 변환하여 대응시킬 수 있습니다. 즉image의 지면 점 \(b_{2}\) 는 그대로 스케일 변환된 3D 공간 상에서 \(0\) 이 되고image상의 무한이 높이 있는 점 \(v\) 는 스케일 변환된 3D 공간 상에서 \(1\) 이 됩니다. - 따라서
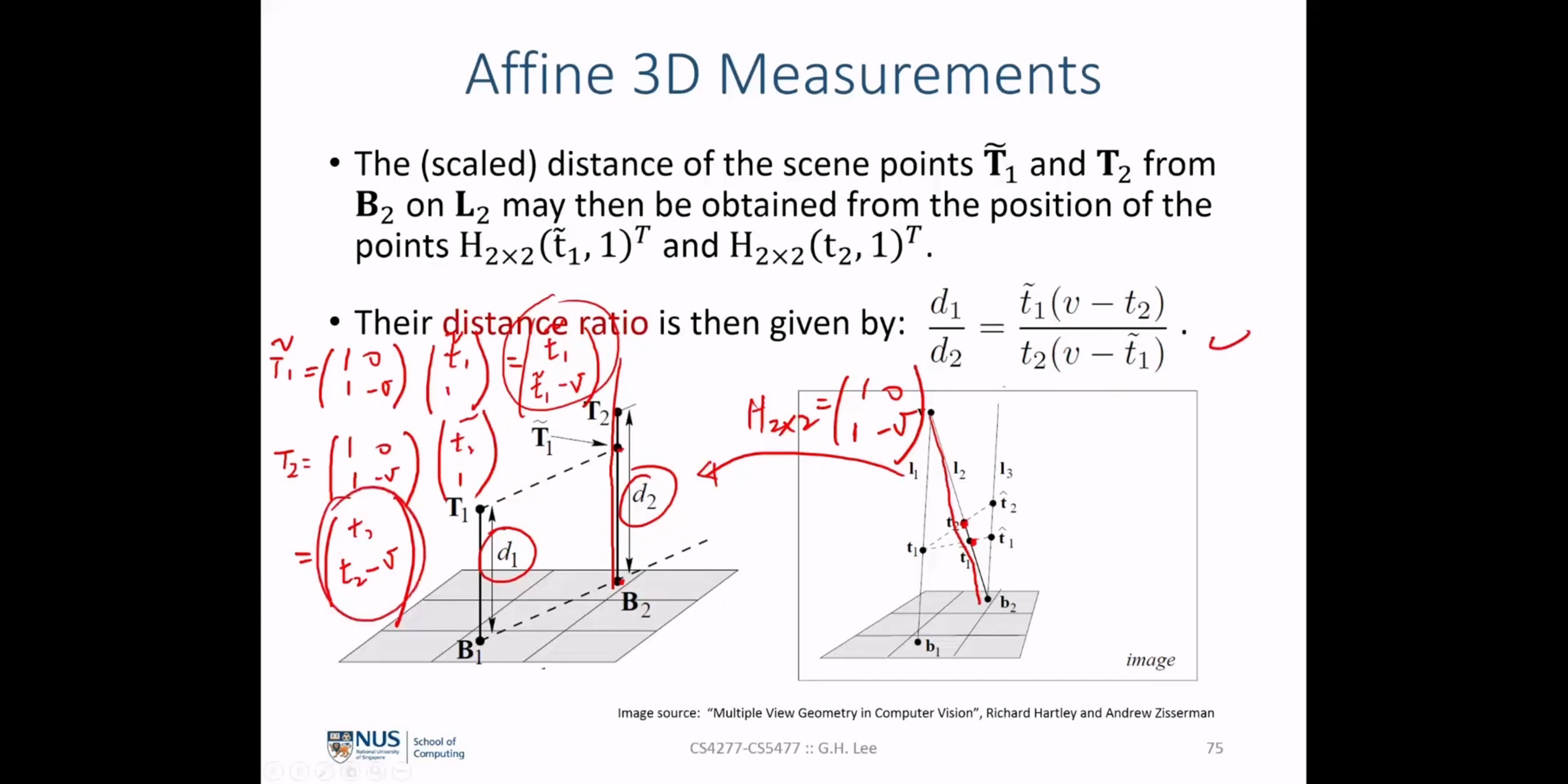
image상의 점 \(\tilde{t}_{1}\) 과 \(H_{2 \times 2}\) 를 통해스케일 변환된 3D space에서의 \(\tilde{T}_{1}\) 의 값과 \(t_{2}\) 와 \(H_{2 \times 2}\) 를 통하여스케일 변환된 3D space에서의 \(T_{2}\) 의 값을 구하면 다음과 같습니다.
- \[\tilde{T}_{1} = \begin{bmatrix} 1 & 0 \\ 1 & -v \end{bmatrix} \begin{bmatrix} \tilde{t}_{1} \\ 1 \end{bmatrix} = \begin{bmatrix} \tilde{t}_{1} \\ \tilde{t}_{1} - v \end{bmatrix}\]
- \[T_{2} = \begin{bmatrix} 1 & 0 \\ 1 & -v \end{bmatrix} \begin{bmatrix} t_{2} \\ 1 \end{bmatrix} = \begin{bmatrix} t_{2} \\ t_{2} - v \end{bmatrix}\]
-
위 결과에서 \(\tilde{T}_{1}\) 과 \(T_{2}\) 는 지면에서 (스케일 변환된) 수직으로 뻗은 위치입니다. 따라서
inhomogeneous로 변환하면 (스케일 변환된)distance가 됩니다. 다음과 같습니다. - \[d_{1} = \frac{\tilde{t}_{1}}{(\tilde{t}_{1} - v)}\]
- \[d_{2} = \frac{t_{2}}{(t_{2} - v)}\]
- 따라서
distance ratio를 구하면 다음과 같습니다.
- \[d_{1} \text{ : } d_{2} = \frac{\tilde{t}_{1}}{(\tilde{t}_{1} - v)} \text{ : } \frac{t_{2}}{(t_{2} - v)}\]
- \[\therefore \frac{d_{1}}{d_{2}} = \frac{\tilde{t}_{1}(v - t_{2})}{t_{2}(v - \tilde{t}_{1})}\]