(멀티플 뷰 지오메트리) Lecture 7. The fundamental and essential matrices
2022, Apr 20
- 참조 : https://youtu.be/eJnG1vwGJkE?list=PLxg0CGqViygP47ERvqHw_v7FVnUovJeaz
- 참조 : https://youtu.be/mNThwULGR-g?list=PLxg0CGqViygP47ERvqHw_v7FVnUovJeaz
- 참조 : https://youtu.be/7QYq7qNkmtg?list=PLxg0CGqViygP47ERvqHw_v7FVnUovJeaz
- 참조 : https://youtu.be/WQvJICS3Ecc?list=PLxg0CGqViygP47ERvqHw_v7FVnUovJeaz
- 참조 : Multiple View Geometry in Computer Vision
- Lecture 7에서는
fundamental matrix와essential matrix내용을 다룹니다. 이 개념들을 통하여 카메라 간의 관계를 정의하기 위한 기본적인 개념을 익힐 수 있습니다.
- 먼저 본 강의 내용에 앞서 다음 내용을 간략히 숙지하면 이해하는 데 도움이 됩니다.
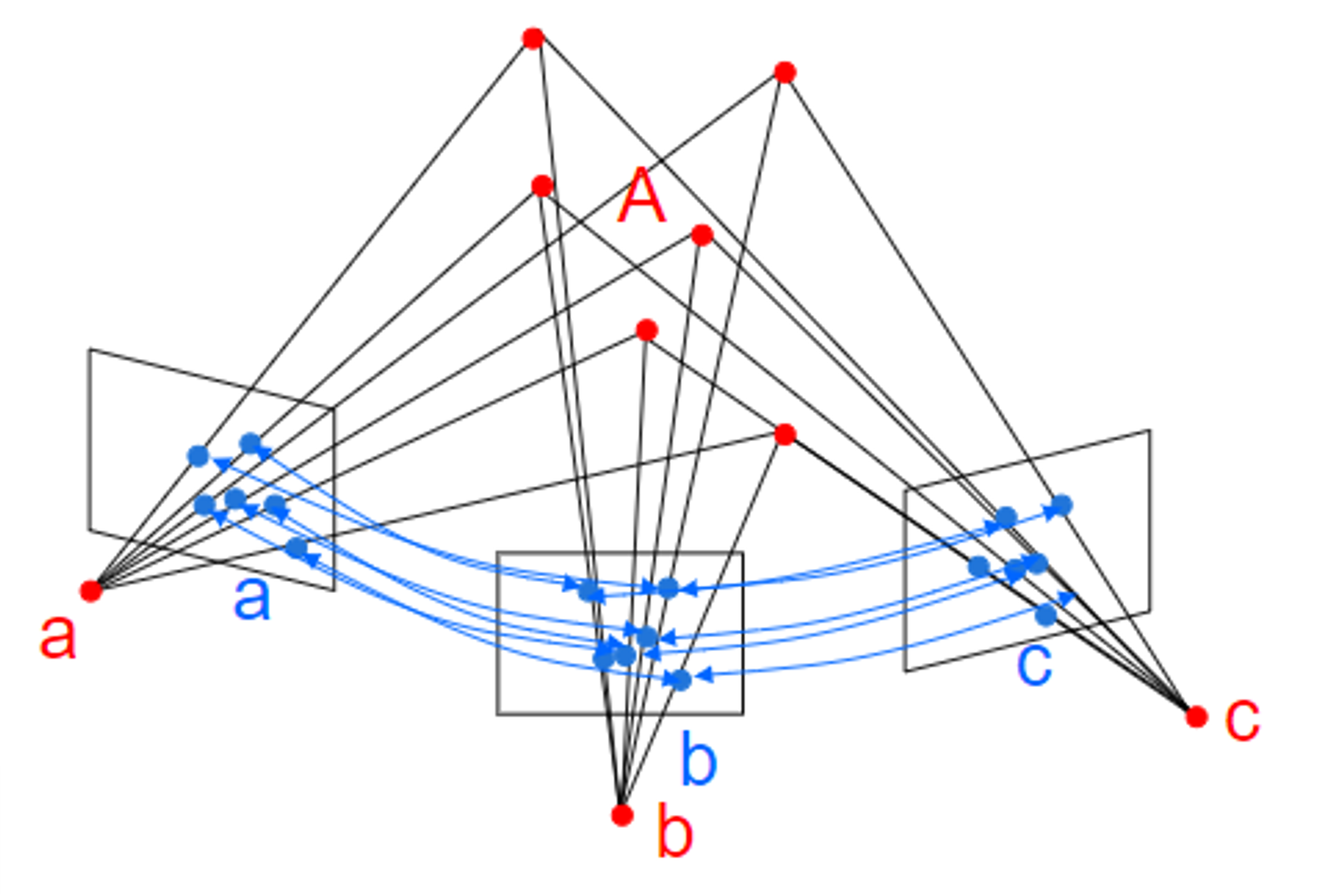
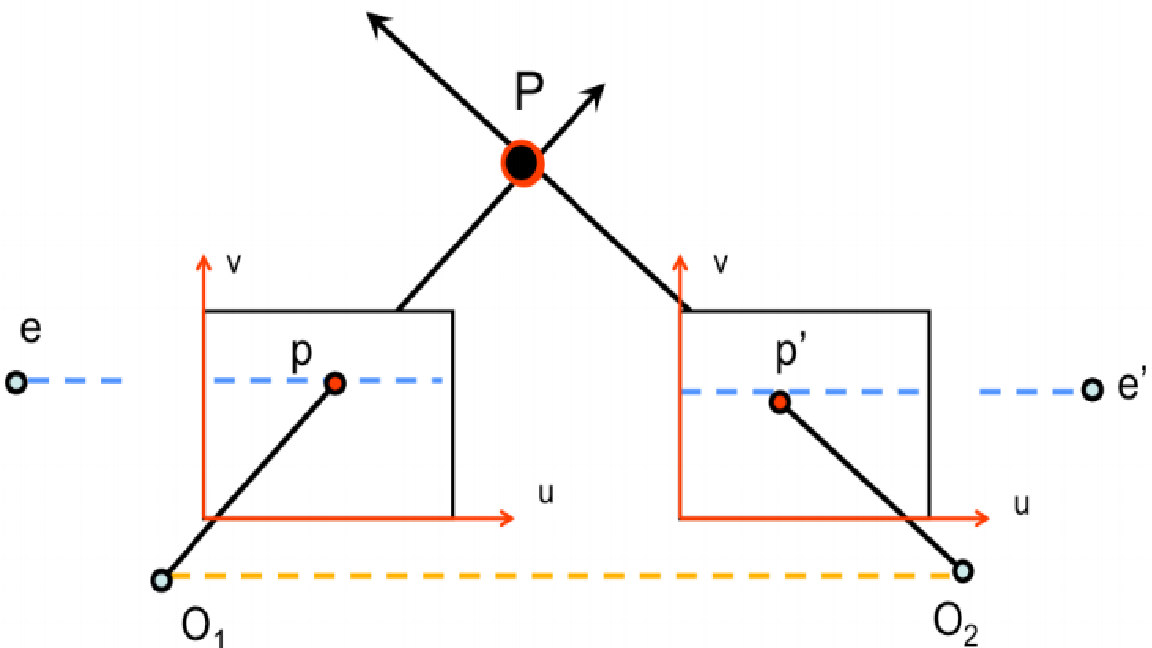
epipolar geometry란 2개이상의 카메라에서 카메라 간의 관계를 추정하는 것으로 생각할 수 있습니다.- 만약 카메라가 2개라면 스테레오 비전 또는 2-view라고 하며 스테레오 비전에서의 두 카메라의 관계를
epipolar geometry로 표현할 수 있습니다. 아래 그림과 같습니다.
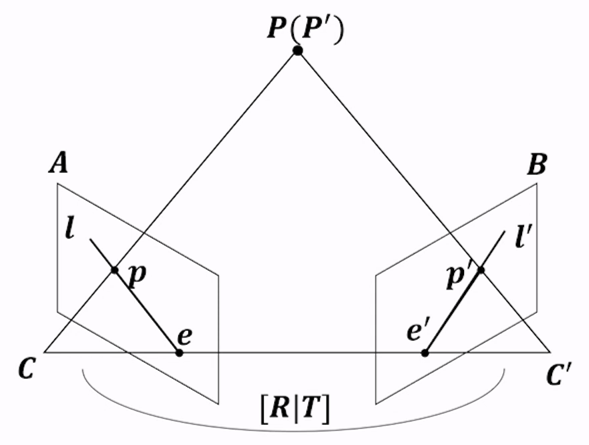
- 위 그림에서 동일한 3차원의 점인 \(P\) 를 서로 다른 두 카메라에서 획득하였을 때, 매칭 쌍 \((p, p')\) 사이의 기하학적 관계를 다룹니다. 먼저 위 그림에 각 기호에 대한 설명을 하면 다음과 같습니다.
- \(P(P')\) : 이미지 상에 맺힐 3차원 공간 상의 점을 의미합니다.
- \(C, C'\) : 각 영상의 카메라 센터점을 의미합니다.
- \(\text{base line}\) : 카메라의 센터점을 이은 선을
base line이라고 합니다. \(C, C'\) 의 거리가 가까운 경우를narrow base line이라고 하고 거리가 먼 경우를wide base line이라고 합니다. - \(p, p'\) : 각 영상에서 \(P(P')\) 가 투영된 점을 의미합니다.
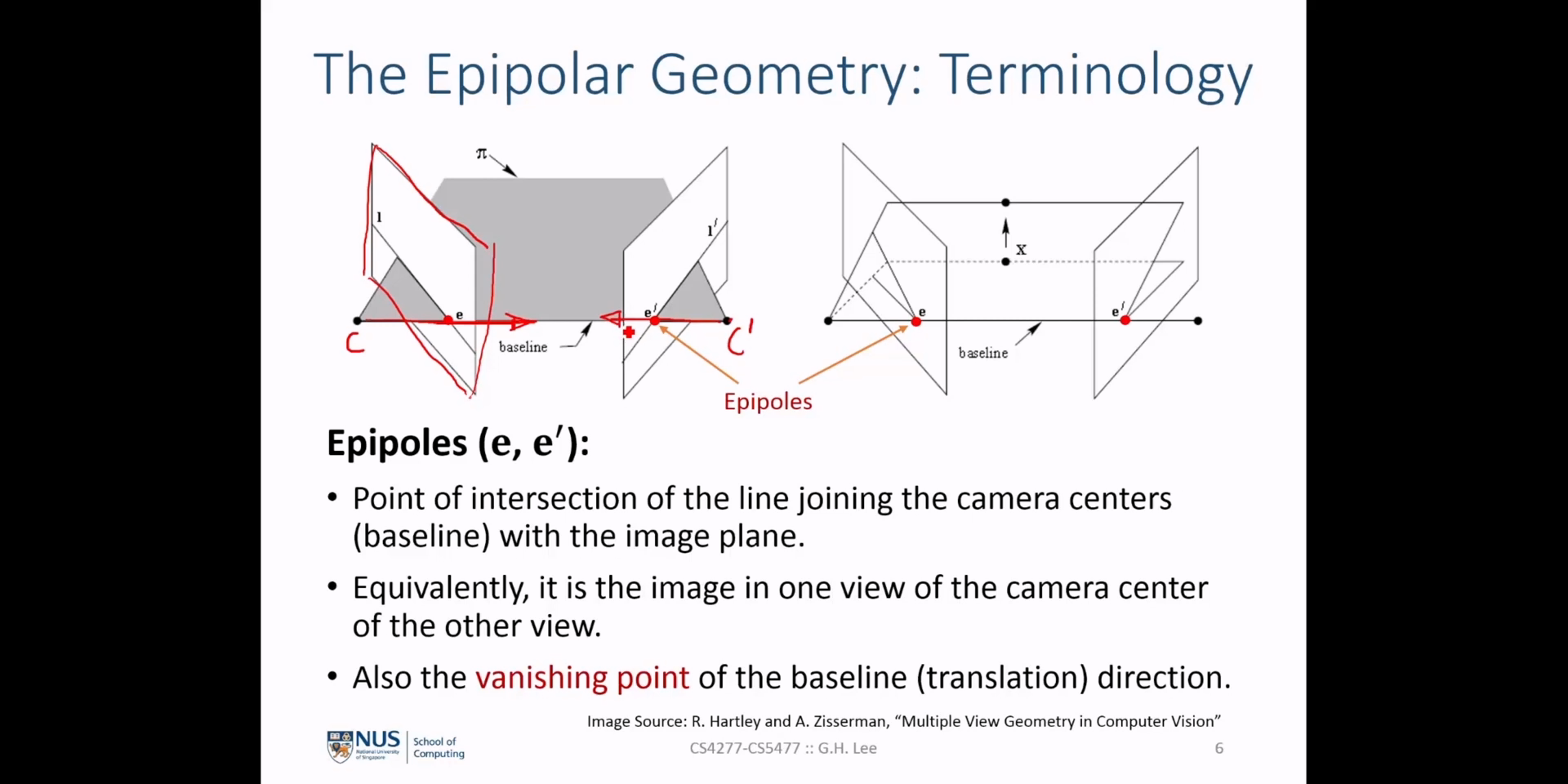
- \(e, e'\) : 반대 영상의 카메라 센터점에서 해당 영상의 이미지 상에 맺힌 점을 의미합니다. 이 점을
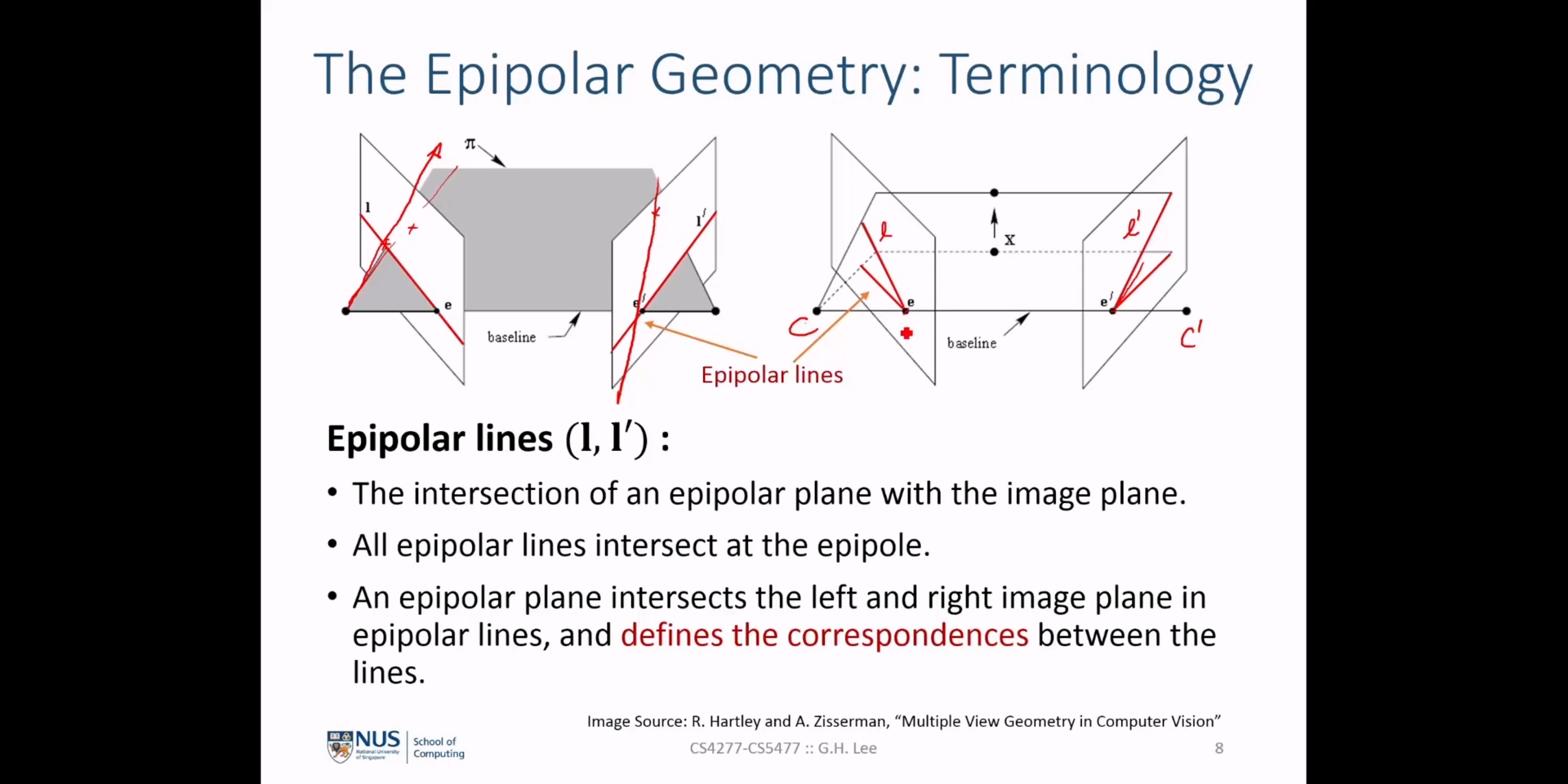
epipole이라고 합니다. - \(l, l'\) : 각 영상에서
epipole( \(e, e'\) )과 이미지 상의 점 ( \(p, p'\) )를 이은 선을 의미합니다. 이 선을epolar line이라고 합니다.
- 위 그림에서 \(C\) 와 \(C'\) 간의 3차원 위치 관계인 \([R \vert T]\) 와 \(p\) 를 알더라도 3차원 공간 상의 점 \(P\) 에 대한 실제 깊이 (
depth) 를 알지 못하면 유일한 \(p'\) 를 결정하지 못합니다. - 반면에 \(P\) 는 \(C\) 와 \(p\) 를 잇는
ray상에 존재하므로 이 선이 반대 영상에 투영된epipolar line\(l'\) 은 유일하게 존재합니다. - 이 때, \(A\) 이미지에서 \(B\) 이미지로 대응되는
epipolar line( \(l'\) ) 의 관계를 나타내는 행렬이 \(F, E\) 이며 각각Fundamental Matrix,Essential Matrix라고 합니다.
Essential Matrix\(E\) 는normalized image plane에서의 매칭쌍들 사이의 기하학적 관계를 설명하는 행렬을 의미하고Fundamental Matrix\(F\) 는 카메라 파라미터 까지 포함한 두 이미지의 실제 픽셀 좌표 사이의 기하학적 관계를 표현하는 행렬을 의미합니다. 따라서 \(E\) 는 \(F\) 의 특수한 형태라고 생각할 수 있습니다.
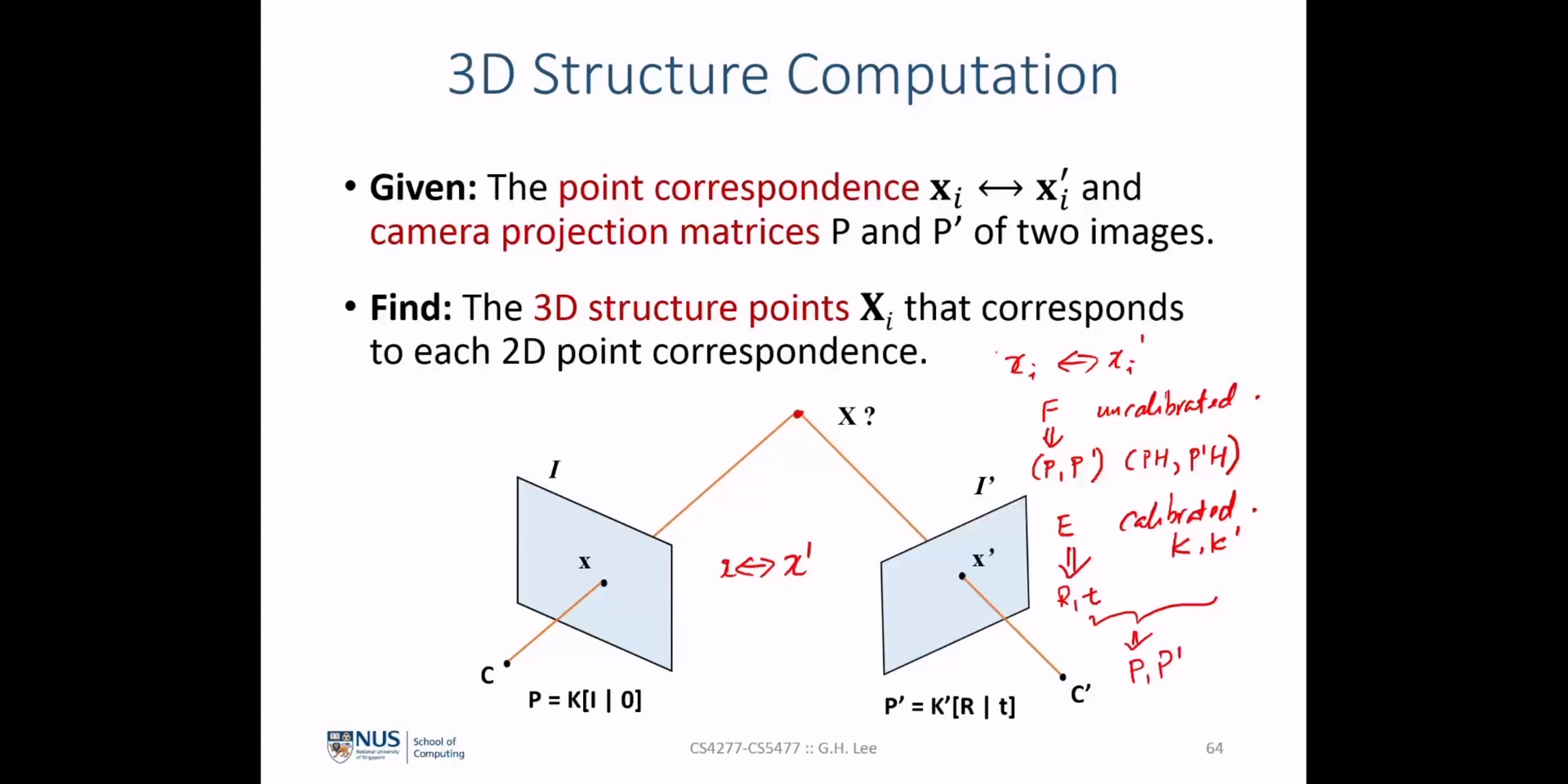
- 두 이미지 평면 간의 기하학적 관계가 \(E, F\) 가 주어지고 두 이미지 평면상의 매칭쌍 \(p, p'\) 가 주어질 때, 3D 공간 상의 좌표 \(P\) 를 결정할 수 있습니다. 따라서 스테레오 비전에서의 깊이 (
depth)를 구할 수 있습니다.
- 상세 내용은 본 강의 내용을 통하여 자세하게 살펴보도록 하겠습니다.
- 이번 슬라이드에서는
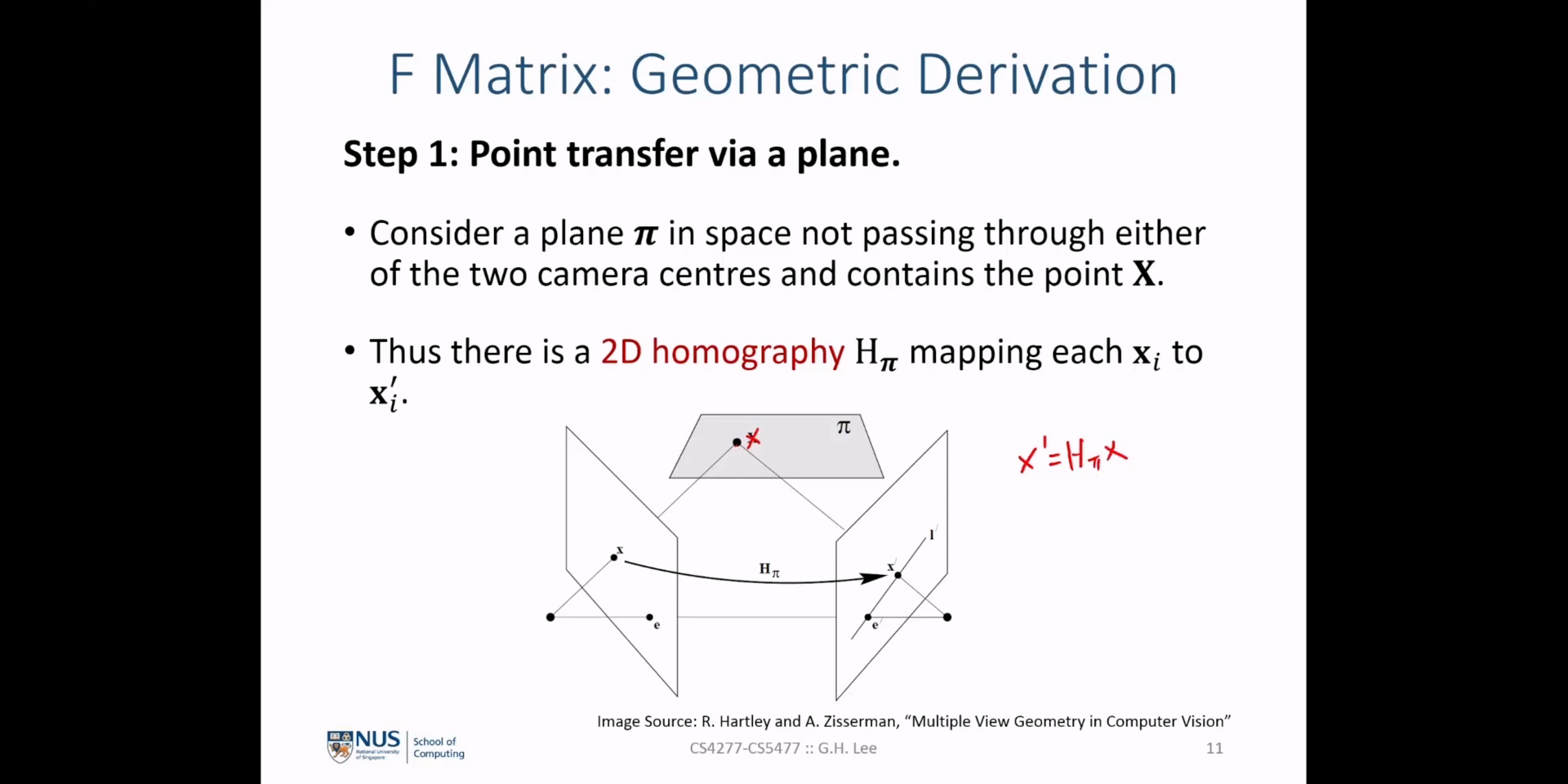
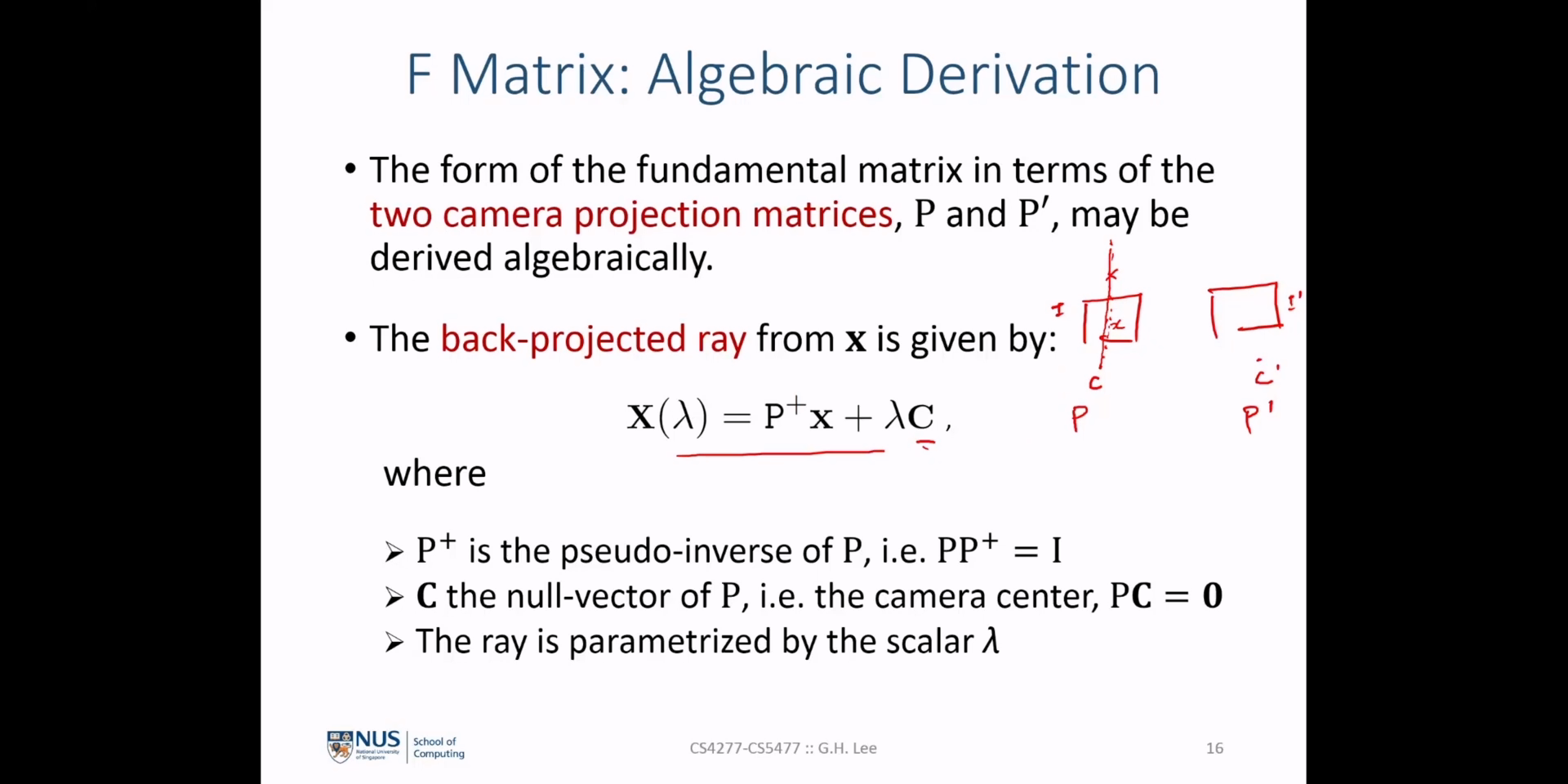
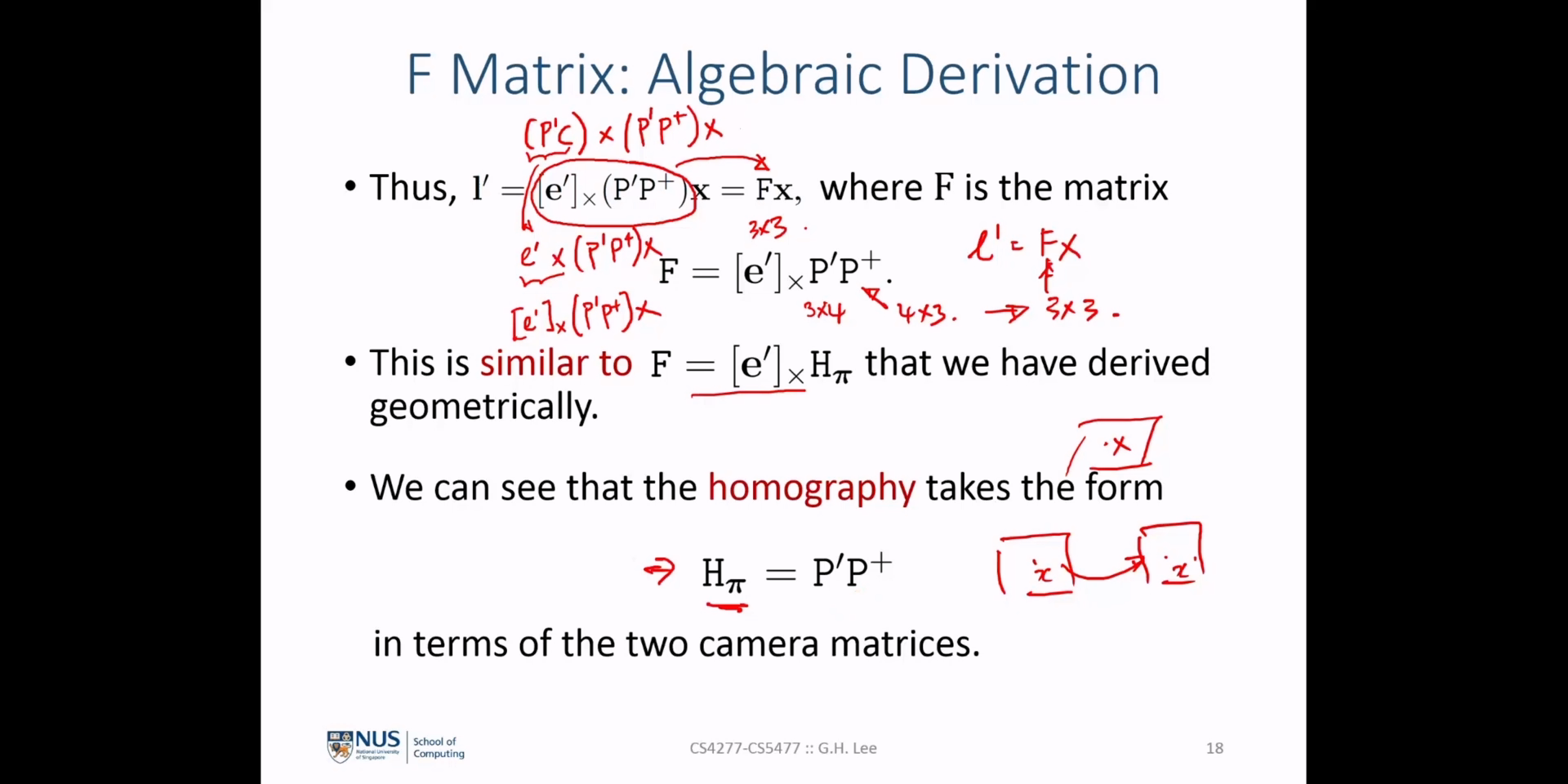
Fundamental Matrix를 유도하기 위하여 필요한 각 요소 값들을 소개합니다. 필요한 값은 \(P, P', P^{+}, C, x\) 의 의미입니다. 3차원 좌표 \(X(\lambda)\) 를 \(P, P', P^{+}, C, x\) 값을 이용하여 표현함으로써 각 성분의 의미를 먼저 이해해 보도록 하겠습니다. - 위 식에서
Projection Matrix\(P, P'\) 는 각각 임의의 3D 포인트 \(X\) 를 이미지 \(I, I'\) 에 투영하는 \(3 \times 4\) 크기의 행렬을 의미합니다. - 반면 \(P^{+}\) 는 \(P\) 의
Pseudo-Inverse행렬을 의미하며 \(3 \times 4\) 행렬의 역행렬을 구하기 위하여Pseudo-Inverse를 이용하여 구합니다. 따라서 \(P^{+}\) 는 \(4 \times 3\) 크기의 행렬이며 이미지 좌표 \(x\) 를 역투영 (back-project) 하는 역할을 합니다. - 3차원 상에서의 카메라 원점을 의미하는 \(C\) 는 \(X(\lambda)\) 를 표현할 때, 방향 벡터 형태로 사용됩니다.
homogeneous coordinate에서 \((X_{C}, Y_{C}, Z_{C}, 1)\) 형태로back-project시 방향 벡터로 사용되며 그 스케일은 \(\lambda\) 를 이용하여 조절합니다. - 정리하면 \(P^{+}x\) 점을 시작 (origin) 으로 하여 카메라 원점에서 뻣어나가는 방향의
ray\(C\) 를 \(\lambda\) 만큼 뻣어나간 것이 3D 포인트 점 \(X(\lambda)\) 가 됩니다.
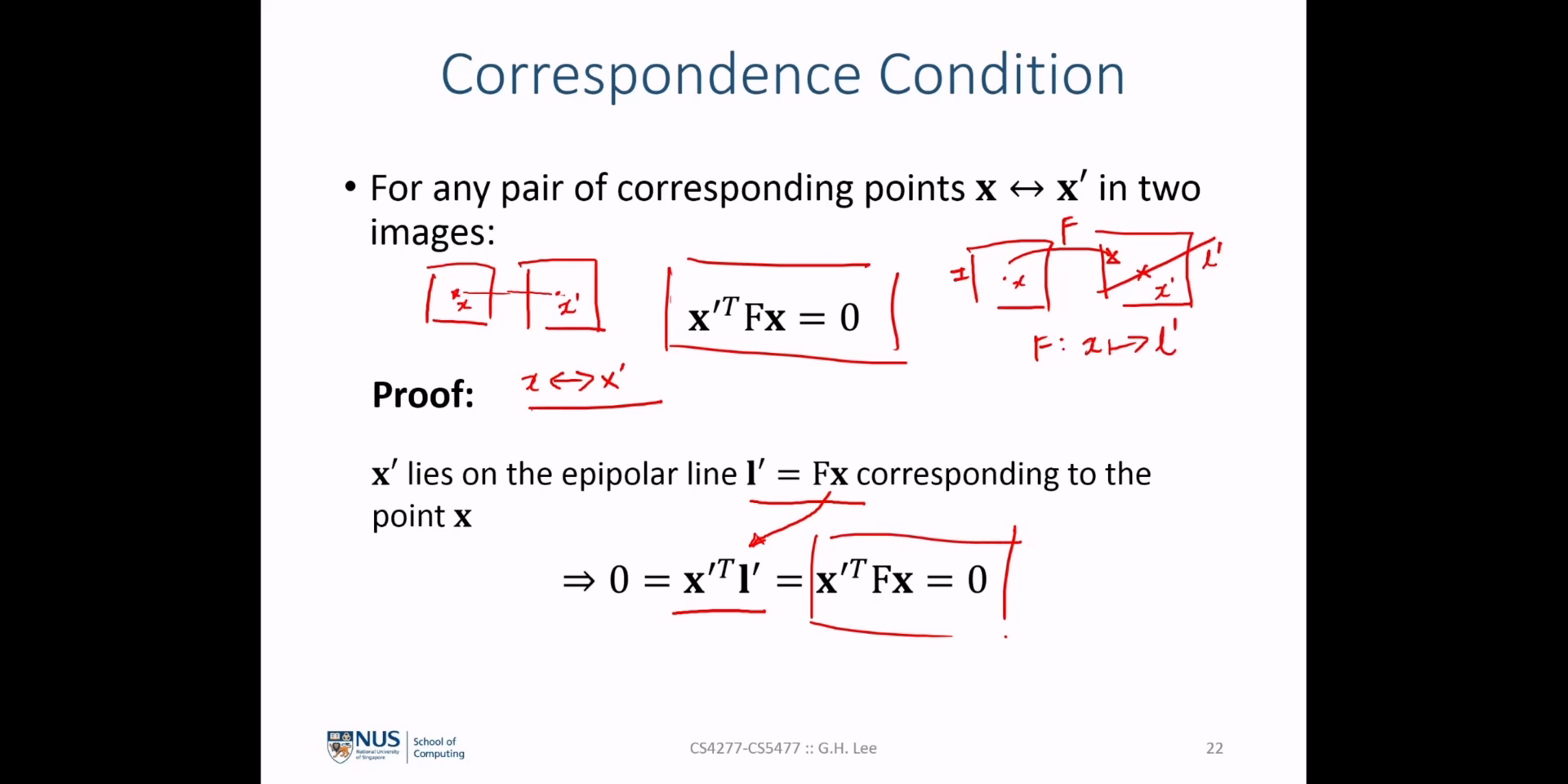
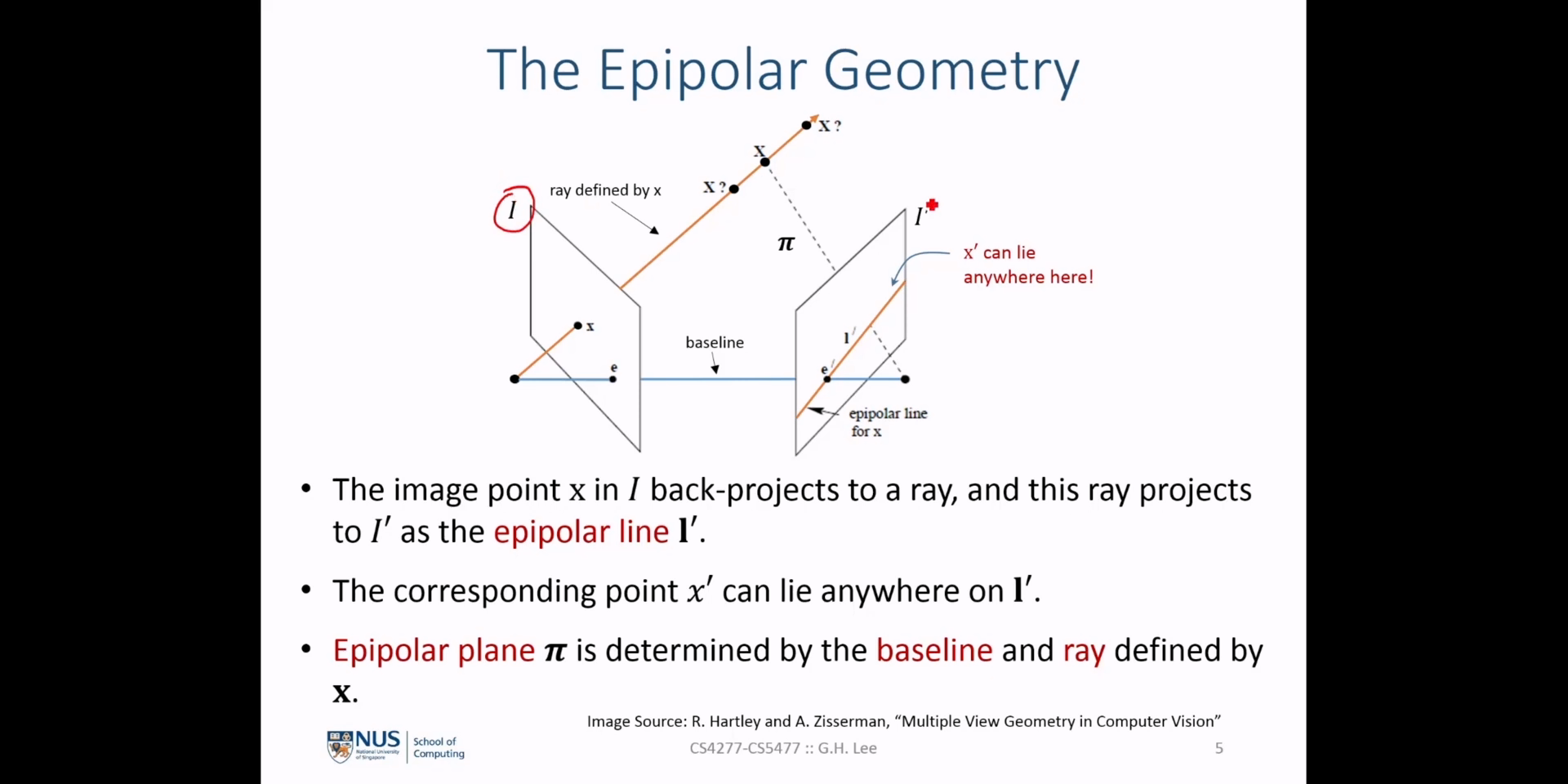
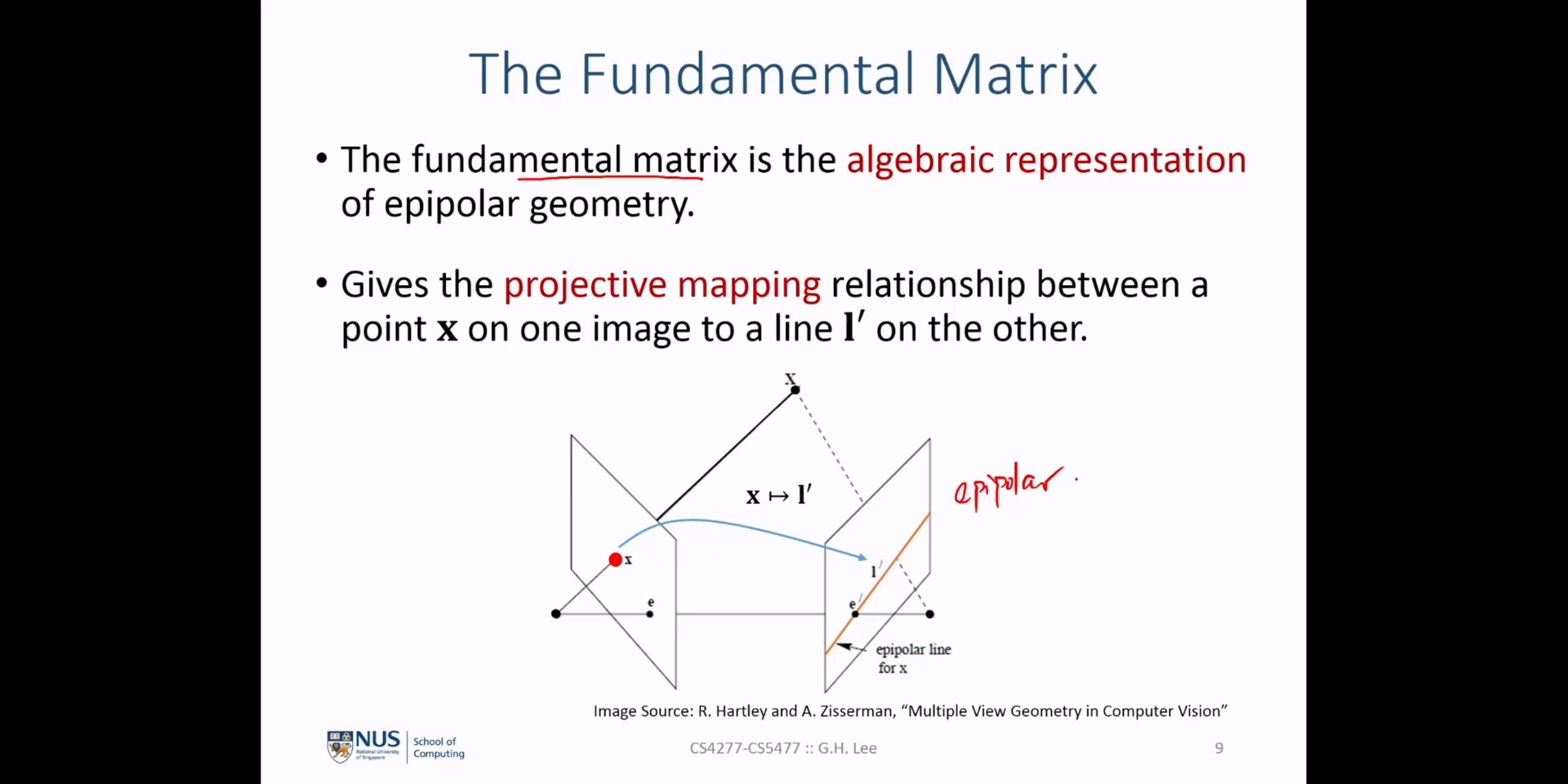
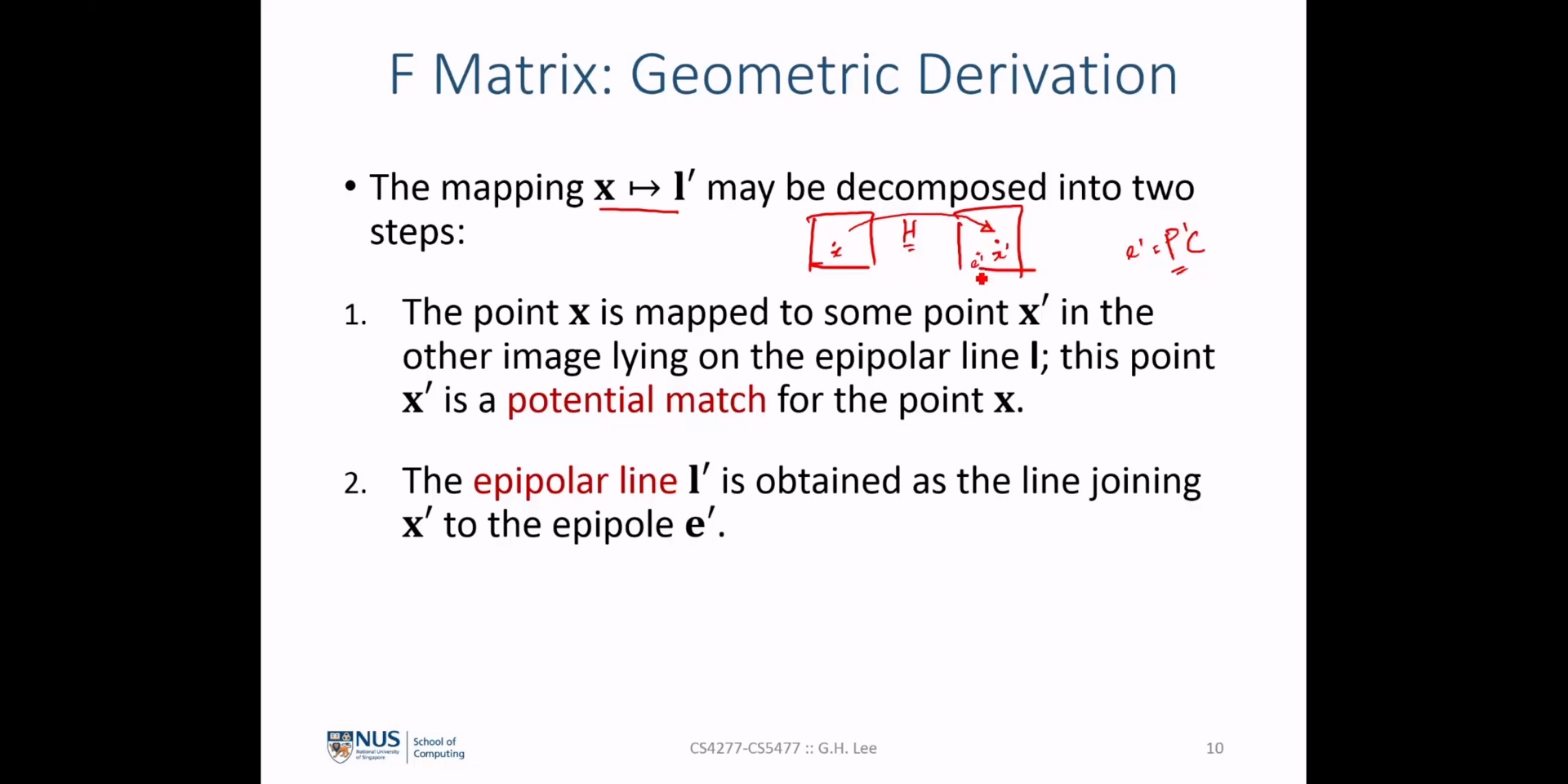
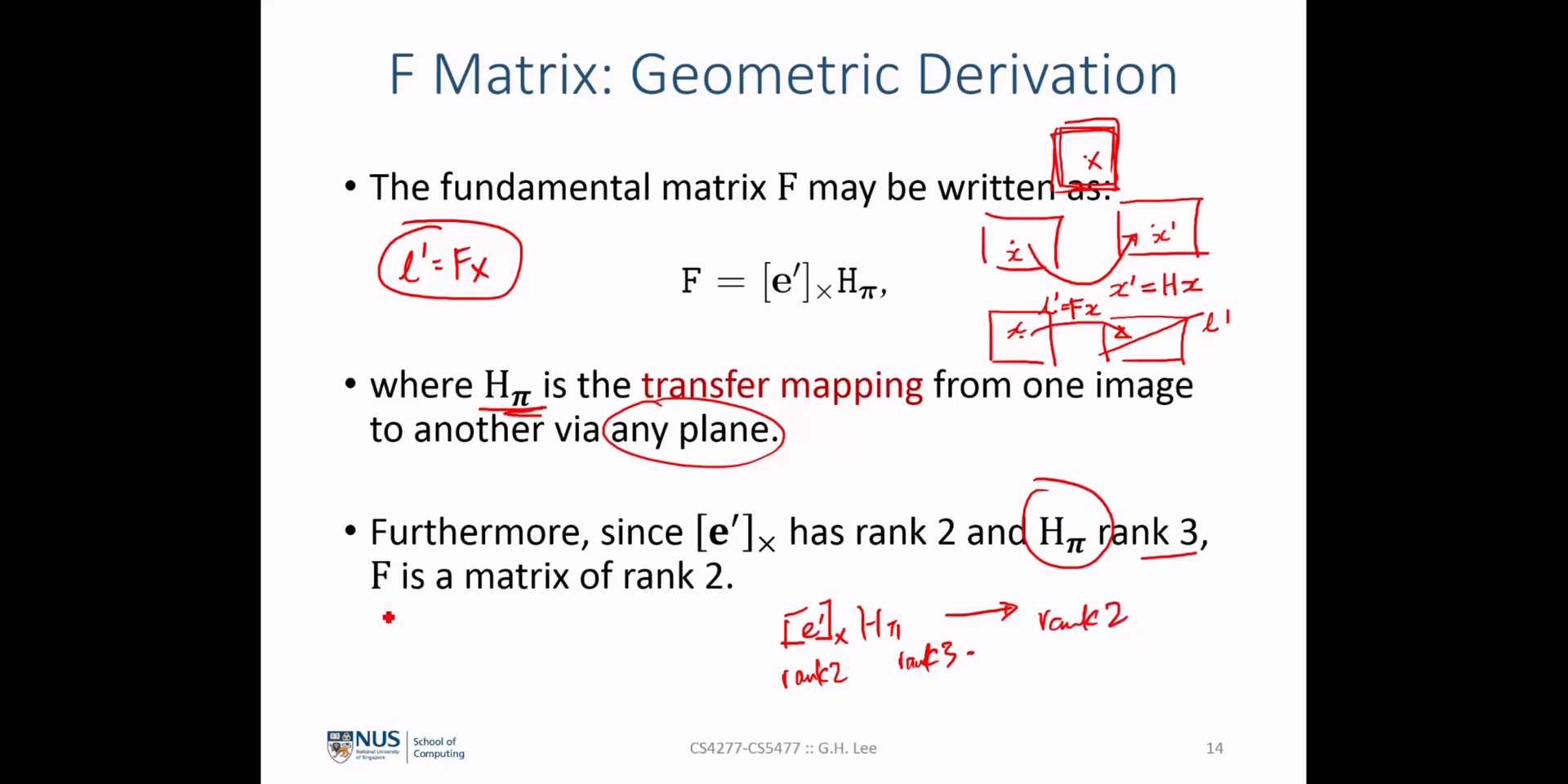
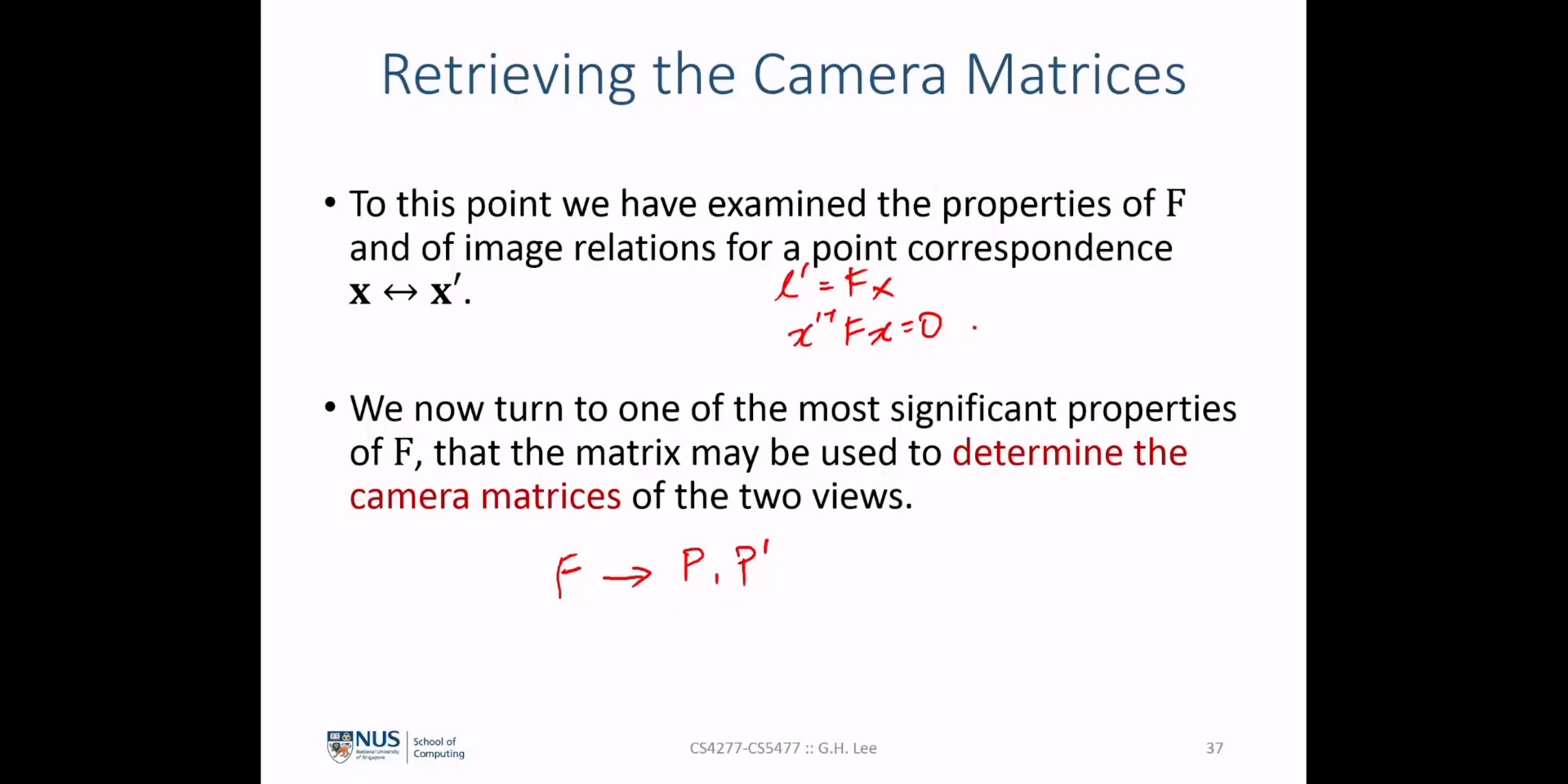
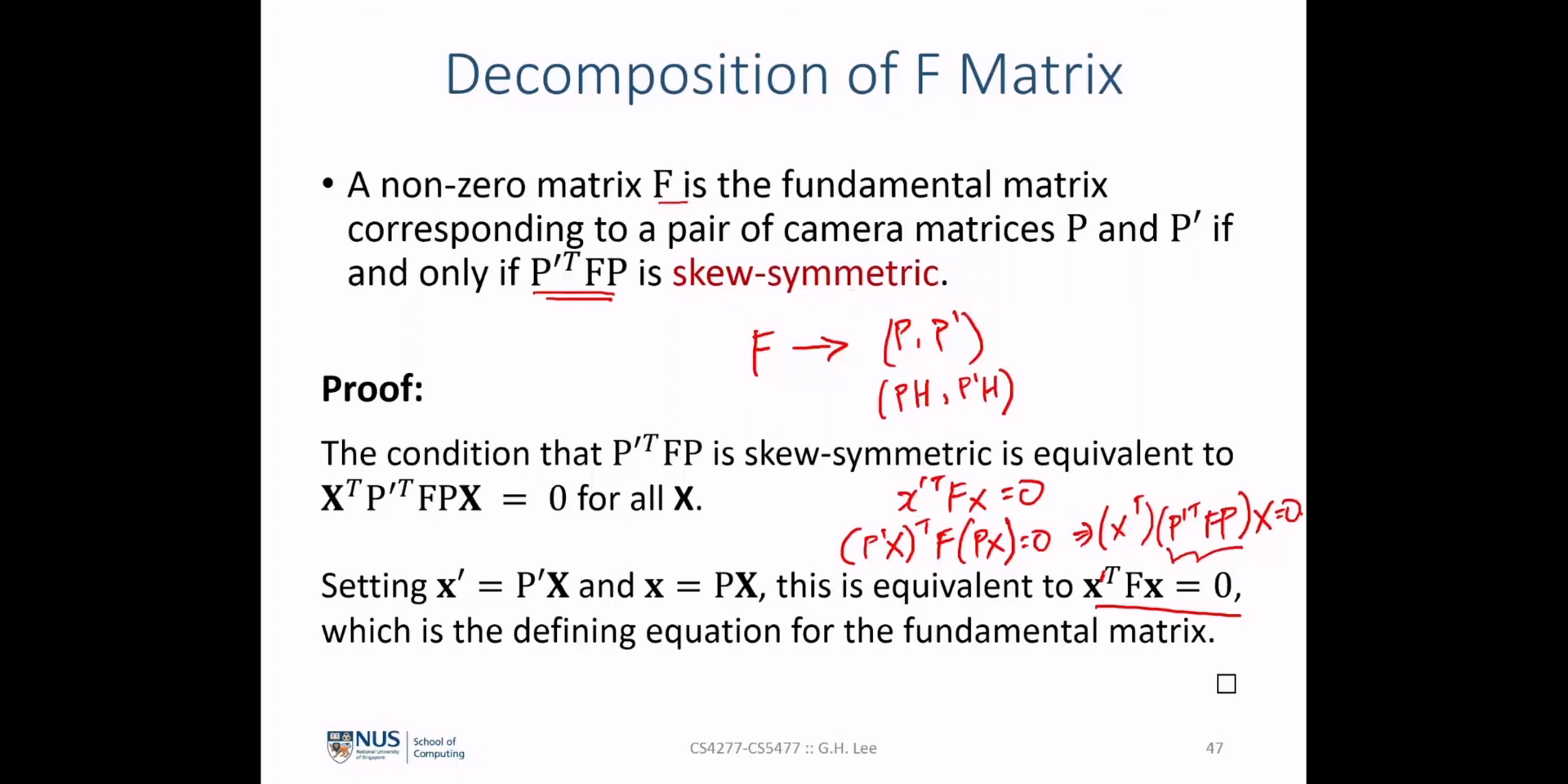
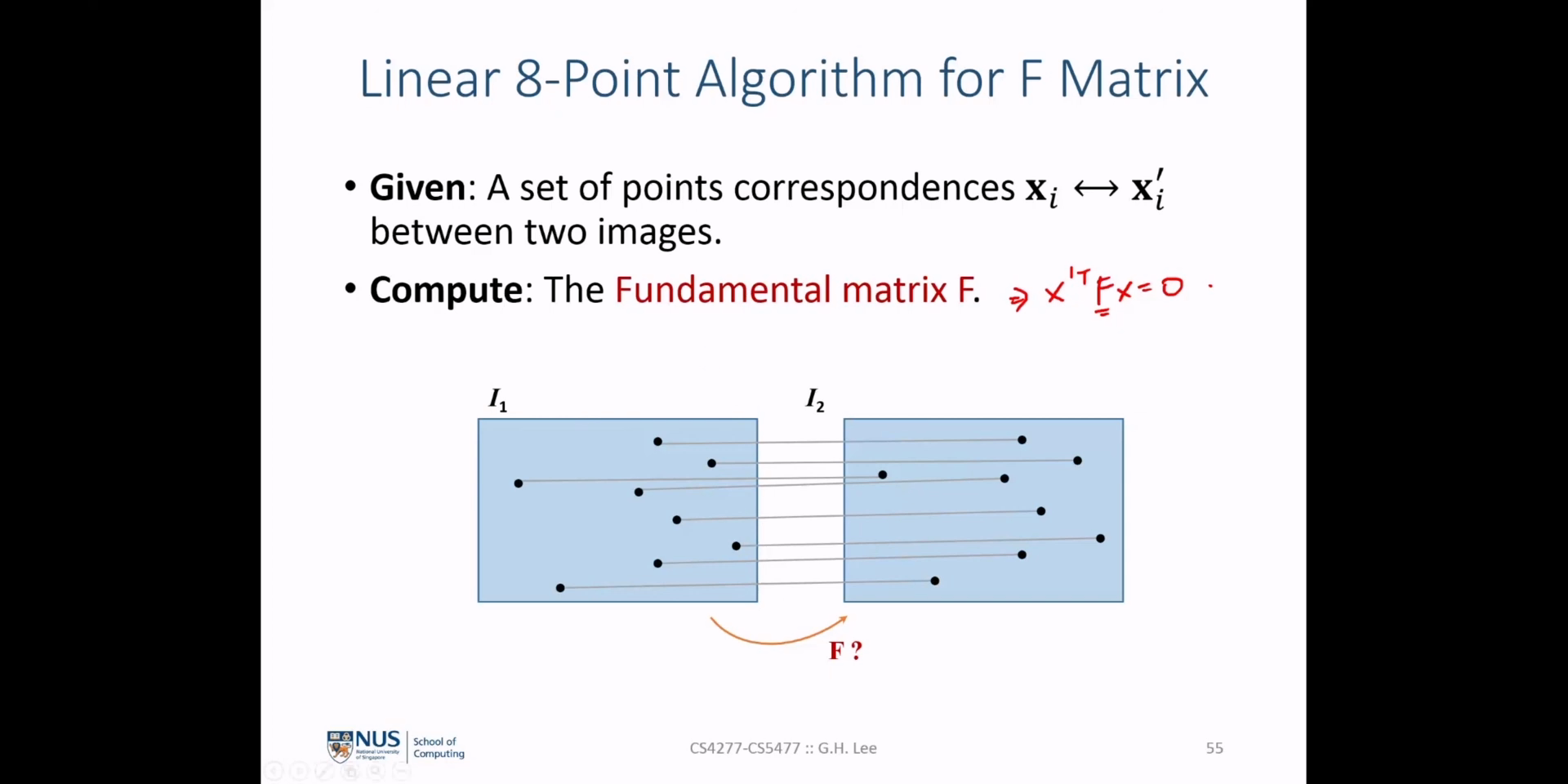
- 하나의 3D 물체를 두 이미지에 각각 투영하여 얻은 점을 \(x, x'\) 라고 하였을 때, 지금까지 살펴본
Fundamental Matrix\(F\) 와 \(x, x'\) 를 이용하여 다음과 같은 식을 나타낼 수 있습니다.
- \[x'^{T} F x = 0\]
- 이와 같이
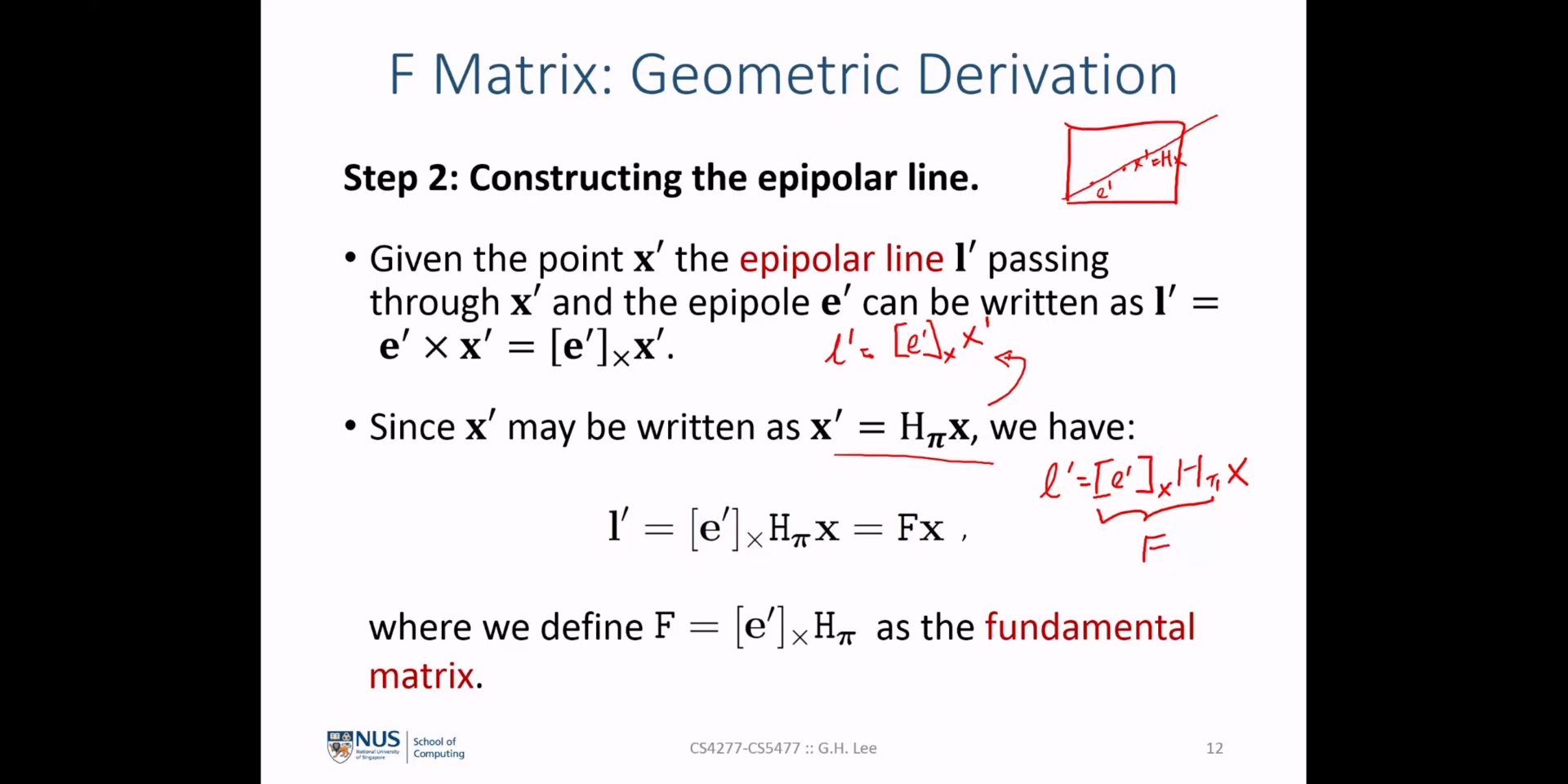
Fundamental Matrix를 통하여 위 식과 같은 조건을 만족하면 \(x, x'\) 를corresponding points관계라고 말할 수 있습니다. 위 식이 만족하는 이유는 슬라이드의 Proof 부분을 보면 쉽게 이해할 수 있습니다. 위 관계를 성립하기 위하여 \(l' = Fx\)epipolar line을 이용합니다. 간략히 살펴보면 다음과 같습니다.
- ① Definition of \(l'\): 두번째 이미지에서의
epipolar line\(l'\) 는 첫번째 이미지의 포인트 \(x\) 와 \(F\) 행렬을 통해 만들어집니다. \(l' = Fx\) - ② Point on the Line : \(x'\) 는 \(x\) 의
corresponding point이기 때문에 반드시epipolar line\(l'\) 상에 있어야 합니다.homogeneous coordinate에서 \(x'\) 가 \(l'\) 상에 있으면 \(x'^{T}l' = 0\) 으로 표현할 수 있습니다. - ③ Substitue \(l'\) : \(x'^{T}l' = x'^{T}(Fx) = 0\)
- 식 \(x'^{T} F x = 0\) 은
epipolar constraint라고도 불립니다.epipolar constraint는 첫번째 이미지에서의 임의의 점 \(x\) 와 \(F\) 가 두번째 이미지에서 만들어내는epipolar line상에 두번째 이미지에서 \(x\) 와corresponding point관계인 \(x'\) 가 존재한다는 조건입니다. epipoelar constraint는multiple view geometry의 가장 기본적이면서도 중요한 개념입니다.corresponding points를 이용하여Stereo Matching,3D reconstruction과 같은 분야를 접근할 수 있기 때문입니다.
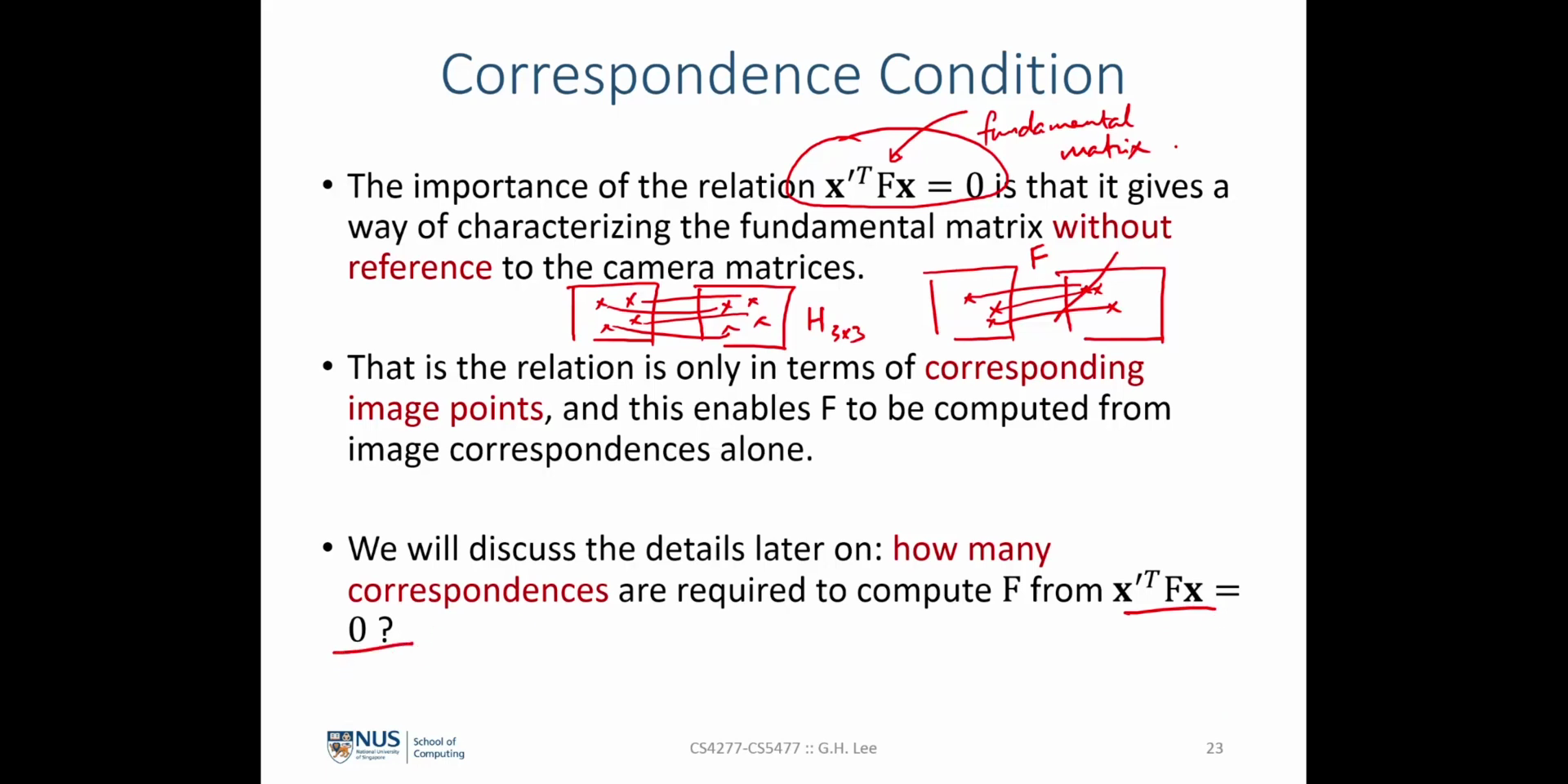
epipolar constraint\(x'^{T} F x = 0\) 의 관계를 구하기 위해서는Fundamental Matrix\(F\) 를 알아야 합니다. \(F\) 를 알기 위해서는 카메라 파라미터 정보와 상관 없이corresponding points인 \(x, x'\) 의 관계들만을 필요로 합니다.- 그러면
Fundamental matrix\(F\) 를 구하기 위하여 필요한corresponding points의 갯수에 대하여 간략히 알아보겠습니다. 상세 내용은 본 글의 뒷부분에서 다룰 예정입니다.
- 참조 : https://stackoverflow.com/questions/49763903/why-does-fundamental-matrix-have-7-degrees-of-freedom
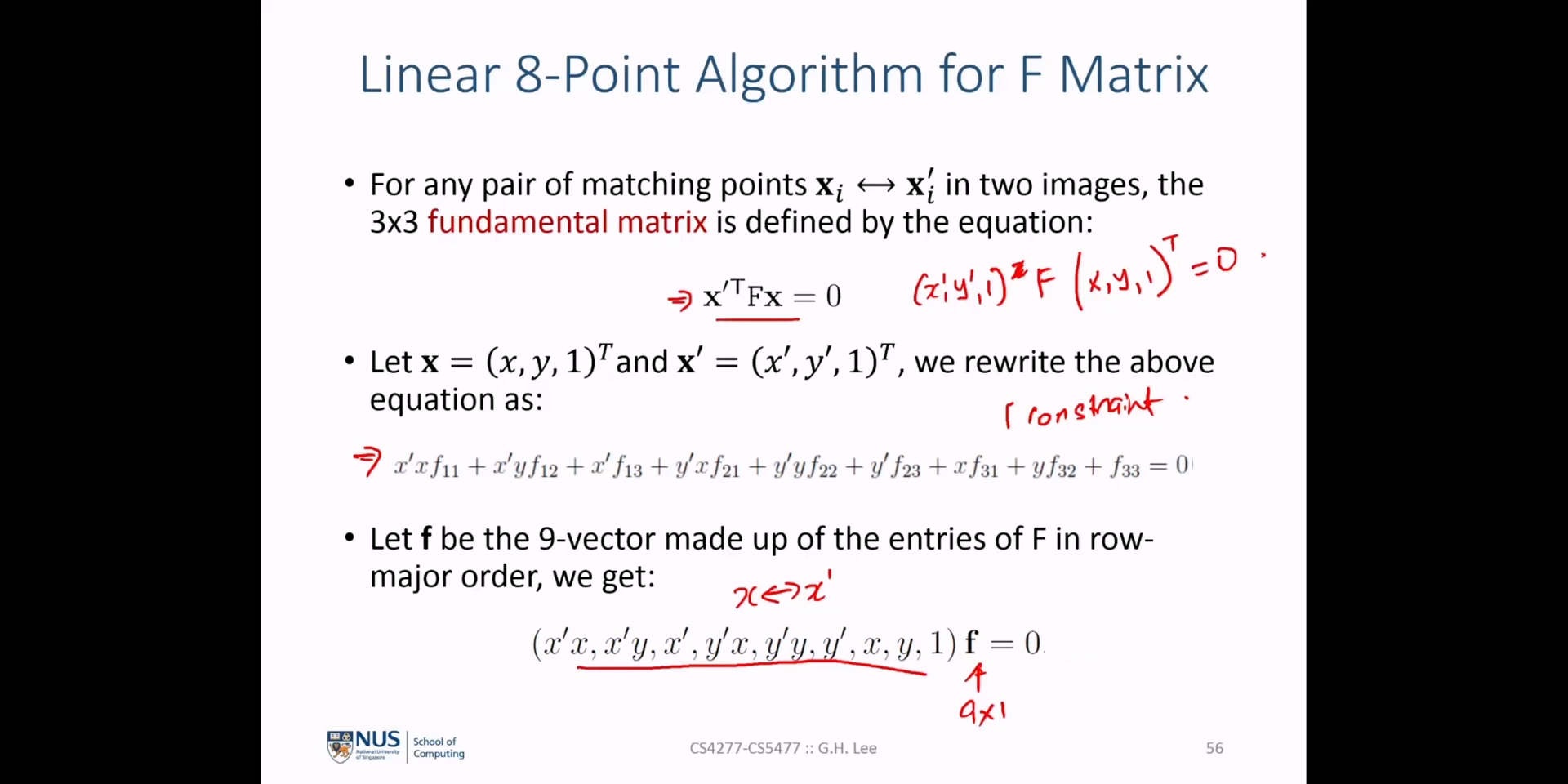
Fundamental Matrix\(F\) 는 \(3 \times 3\) 크기를 가지는 행렬이므로 9 개의 값을 가집니다. 따라서 9개의 자유도를 가지기 때문에 9 개의corresponding points가 필요한 것으로 보이지만Fundamental Matrix는 7개의 자유도인7-DOF를 가지므로 7개의corresponding points를 필요로 합니다.- 7개의 자유도를 가지는 이유는
Fundamental Matrix의scale ambiguity와rank-2 constraint와 연관되어 있습니다. scale ambiguity는 스케일 값에 무관함을 나타내며 \(F\) 와 \(\alpha F (\alpha \ne 0 )\) 가 같은 의미를 가지는 행렬이므로 이러한scale ambiguity가 발생합니다. 이 컨셉은homogeneous coordinate에서 충분히 많이 다룬 개념입니다. 수식으로 좀 더 자세히 살펴보면 다음과 같습니다.
- \[x = \begin{bmatrix} u & v & 1 \end{bmatrix}^{T}\]
- \[x' = \begin{bmatrix} u' & v' & 1 \end{bmatrix}^{T}\]
- \[F = \begin{bmatrix} f_{1} & f_{2} & f_{3} \\ f_{4} & f_{5} & f_{6} \\ f_{7} & f_{8} & f_{9} \end{bmatrix}\]
- \[x'^{T} F x = 0\]
- 위 식을 풀어서 정리해 보면 다음과 같습니다.
- \[uu'f_{1} + vu'f_{2} + u'f_{3} + uv'f_{4} + vv'f_{5} + v'f_{6} + uf_{7} + vf_{8} + f_{9} = 0\]
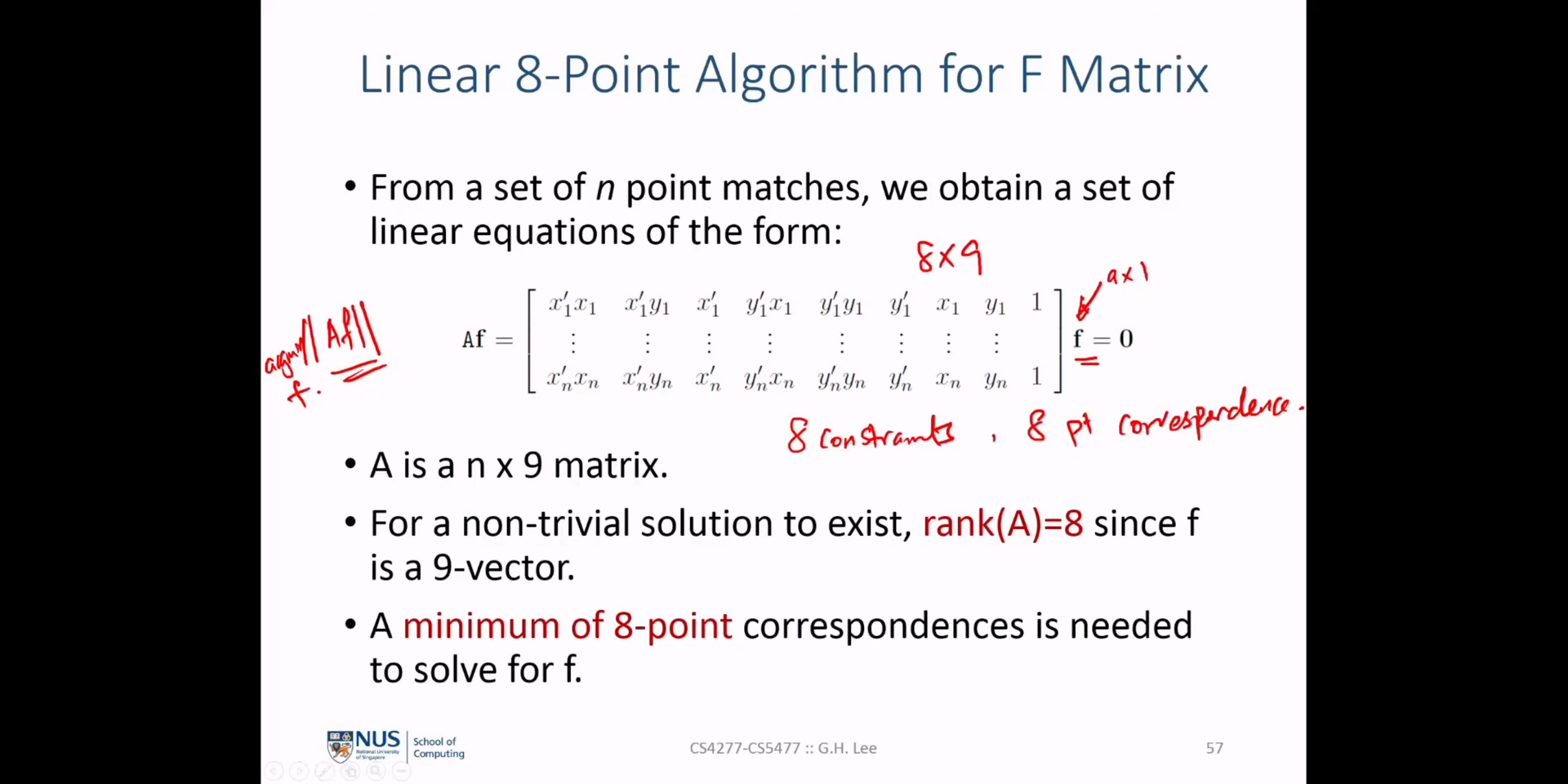
- 위 식을 \(AF = 0\) 형태로 나타내면 \(A\) 와 \(F\) 는 다음과 같습니다.
- \[AF = 0\]
- \[A = \begin{bmatrix} uu' & vu' & u' & uv' & vv' & v' & u & v & 1 \end{bmatrix}\]
- \[F = \begin{bmatrix} f_{1} & f_{2} & f_{3} & f_{4} & f_{5} & f_{6} & f_{7} & f_{8} & f_{9} \end{bmatrix}\]
- 행렬 \(A\) 를 살펴보면 8개의 미지수가 있고 위 예시에서는 1이라는 상수가 한개 있습니다. 이 값이 1이기 때문에 이미 미지수를 풀 수 있는 하나의 정보는 주어졌고 이 정보가
scale에 관한 정보입니다. 1은 \(f_{9}\) 와 곱해지고 \(f_{9}\) 가scale에 해당합니다. - 만약 1이 아니라 \(\alpha\) 라는 값이 적용 된다면 \(A\) 의 모든 원소에 \(\alpha\) 를 곱하여 \(AF = 0\) 을 만족시킬 수 있습니다. 따라서 이 값을 통해
scale ambiguity의 성질을 만족시킬 수 있습니다.
- 두번째로
rank-2 constraint에 관한 것입니다. \(l' = Fx\) 를 통하여 임의의 점 \(x\) 에 \(F\) 를 곱하면 선 형태인epipolar line을 얻을 수 있음을 확인하였습니다. 즉, \(F\) 는 모든 column 또는 row 성분이 independent 한full rank행렬이 아니기 때문에 점이 선으로 변환될 수 있습니다. (만약full rank행렬이면 \(l' = Fx\) 를 얻을 수 없고 \(Fx\) 는 포인트가 되어야 합니다.) full rank가 아닌 행렬은determinant가 0이 되기 때문에 다음과 같이 식을 전개해 볼 수 있습니다.
- \[F = \begin{bmatrix} f_{1} & f_{2} & f_{3} & f_{4} & f_{5} & f_{6} & f_{7} & f_{8} & f_{9} \end{bmatrix}\]
- \[\text{det}(F) = (f_{1}*f_{5}*f_{8})+(f_{2}*f_{6}*f_{7})+(f_{3}*f_{4}*f_{8})-(f_{3}*f_{5}*f_{7})-(f_{2}*f_{4}*f_{9})-(f_{1}*f_{6}*f_{8}) = 0 \quad \text{by determinant formula}\]
- 식 \(\text{det}(F) = 0\) 에서 단 하나의 미지수를 제외하고 다른 미지수의 해를 구하면 나머지 하나의 미지수는 자동으로 결정되기 때문에 자유도가 하나 줄어들게 됩니다.
- 따라서
scale ambiguity로 인하여 \(f_{9}\) 의 결정이 필요 없어져서 자유도가 1 감소되는 것과 \(\text{det}(F) = 0\) 조건으로 인한 자유도 1 감소로Fundamental Matrix는7 DoF를 가지게 됩니다.
- 추가적으로
rank 2가 가지는 의미와rank 1을 가지면epipolar constraint을 만족할 수 없음을 보이면 다음과 같습니다.
- 먼저
rank 2가 가지는 기하학적인 의미입니다. - ①
Point-to-Line Mapping - ②
Epipolar Constraint
- 다음으로
rank 2가 가지는 대수적인 의미입니다. - ①
Rank Deficiency - ②
Null Vectors - ③
Non-Invertibility
- 다음으로
rank 1을 가지면epipolar constraint을 만족할 수 없는 이유를 설명하겠습니다. - ①
Rank Deficiency: \(3 \times 3\) 행렬이rank-1을 가지면 column (또는 row) 들 중 하나만 의미가 있으며 나머지는 linear combination을 통해 만들어 지는 것은 의미합니다. 따라서 단일 선 (single line) 만을span할 수 있습니다. - ②
Point-to-Point Mapping: 3차원에서rank-1행렬은 모든 포인트들을 단일 선에 매핑되도록 축소시킵니다.Fundamental Matrix와 관련하여,rank-1행렬의 의미는 한 이미지의 모든 점이 다른 이미지의 단일 점으로 매핑되는 것을 의미하므로 적합하지 않습니다. - ③
Loss of Epipolar Constarint:rank-1행렬에서epipolar constraint\(x'^{T} F x = 0\) 식은 만족하지만 기하학적인 의미는 만족하지 못합니다. 왜냐하면 이미지의 모든 점들에 대하여 고정된epipolar line만 존재하기 때문에 실제 사용하고자 하는 3D 조건에 부합하지 못합니다.
- 지금까지 살펴본
Fundamental Matrix의 성질에 대하여 몇가지 살펴보도록 하겠습니다.
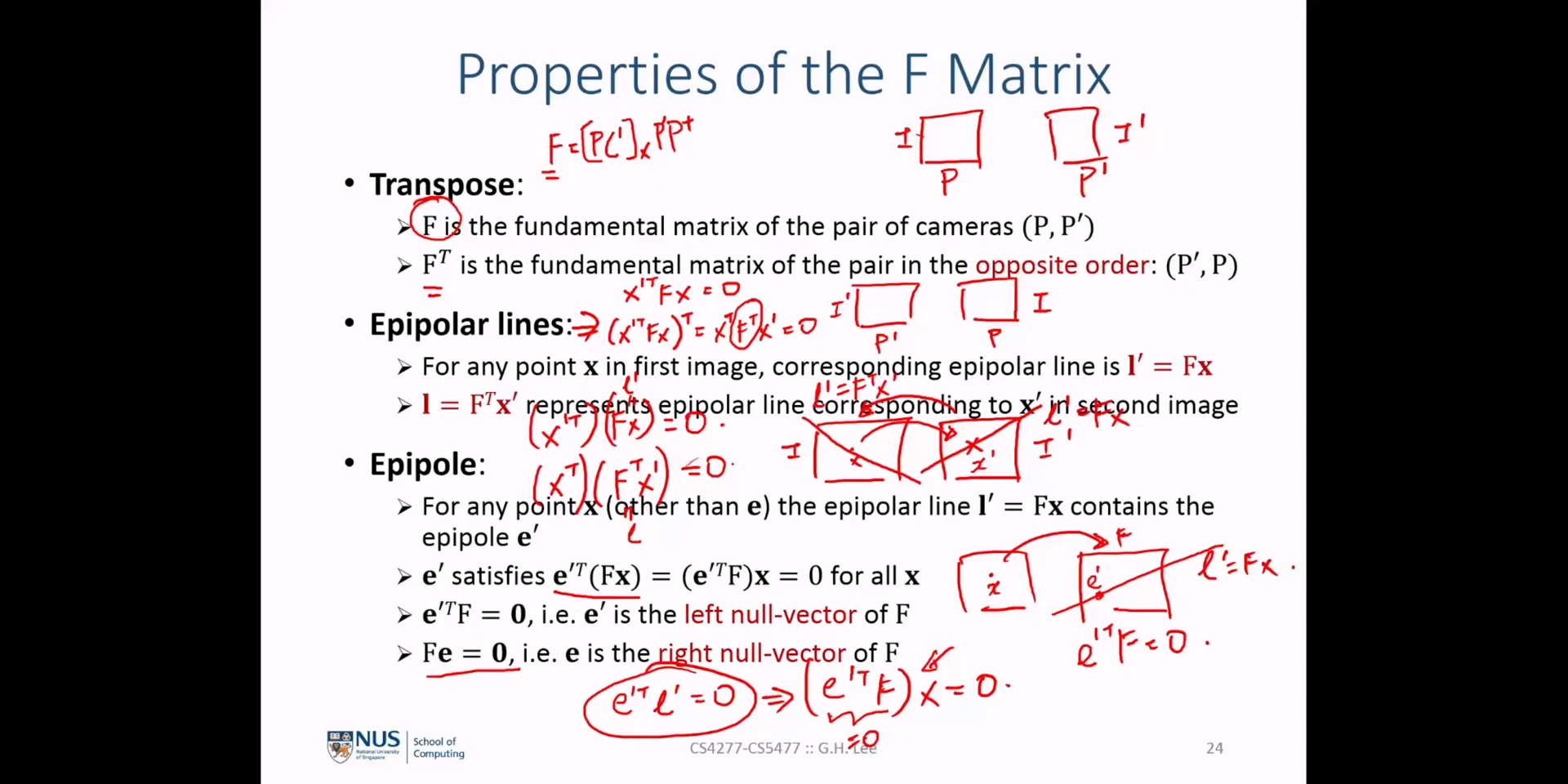
- 먼저
Transpose성질에 대하여 살펴보도록 하겠습니다. \(F\) 는 \((P, P')\) 와 \((P', P)\) 양쪽에 모두 적용될 수 있습니다. \((P, P')\) 에 대한 관계를 \(F\) 로 나타날 때, \((P', P)\) 는 \(F^{T}\) 로 나타낼 수 있습니다. 이러한 대칭 관계가 성립하는 이유는epipolar geometry에서 두 이미지 간의 역 관계가 성립하기 때문입니다. 역관계를 살펴보면 다음과 같습니다.
- \[x'^{T} F x = 0\]
- \[(x'^{T} F x)^{T} = 0\]
- \[(x'^{T} F x)^{T} = x^{T} F^{T} x' = 0\]
- 다음으로
Epipolar lines성질에 대하여 살펴보도록 하겠습니다. 관련 내용은 앞에서 다룬 내용입니다. \(l' = Fx\) 로 정의되는epipolar line은 두번째 이미지에 형성되며 첫번째 이미지의 포인트 \(x\) 에 대응됩니다. - 반대 방향으로 \(l = F^{T} x'\) 로 식을 적용할 수 있습니다. \(l\) 은 첫번째 이미지에 형성되는
epipolar line이고 두번째 이미지의 포인트 \(x'\) 에 대응됩니다. - 2가지 방향 모두 아래 식과 같이
epipolar constrain을 통해 정의될 수 있습니다.
- \[x'^{T} F x = (x'^{T}) (F x) = (x'^{T}) l' = 0\]
- \[x^{T} F^{T} x' = (x^{T}) (F^{T} x') = (x^{T}) l = 0\]
- 다음으로
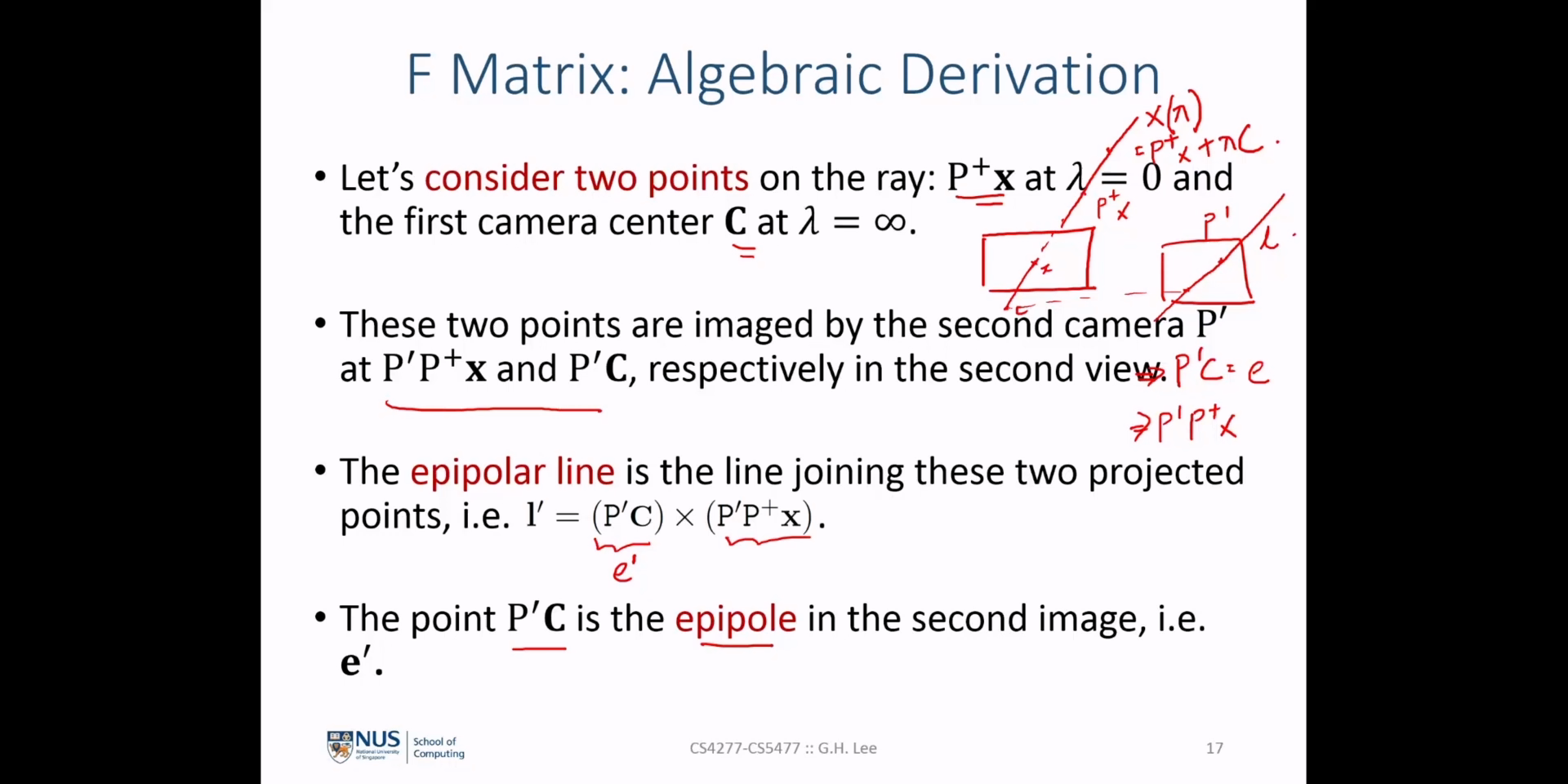
Epipole성질에 대하여 살펴보도록 하겠습니다. - 두번째 이미지의 임의의
epipolar line\(l' = Fx\) 은epipole\(e'\) 를 포함하고 있습니다. 왜냐하면 두번째 이미지의epipole은 첫번째 이미지를 촬영한 카메라의 센터점이기 때문에 \(l'\) 는 항상 \(e'\) 에 수렴하게 되어있습니다. 이 원리는 반대 방향도 동일하게 적용됩니다. - 다음으로
Epipole과Fundamental Matrix의 관계를 살펴보면 다음과 같습니다. 다음 수식을 살펴보겠습니다.
- \[e'^{T} (Fx) = (e'^{T}F)(x) = 0\]
epipole\(e'\) 는epipolar line\(l'\) 상에 있기 때문에 위 식과 같이 적을 수 있습니다. 그리고 \(x\) 는 영벡터가 아닌 유효한 이미지 포인트이기 때문에 \((e'^{T}F) = 0\) 를 만족해야 위 식을 만족시킬 수 있습니다.- 따라서 \(e'\) 는 \(F\) 에 대하여
left null-vector가 됩니다.
- 반대 방향으로 적용하면 다음과 같습니다.
- \[e^{T} F^{T} x' = x'^{T} F e = x'^{T} (F e) = 0\]
- 같은 논리로 \(e\) 는 \(F\) 에 대하여
right null-vector가 됩니다.
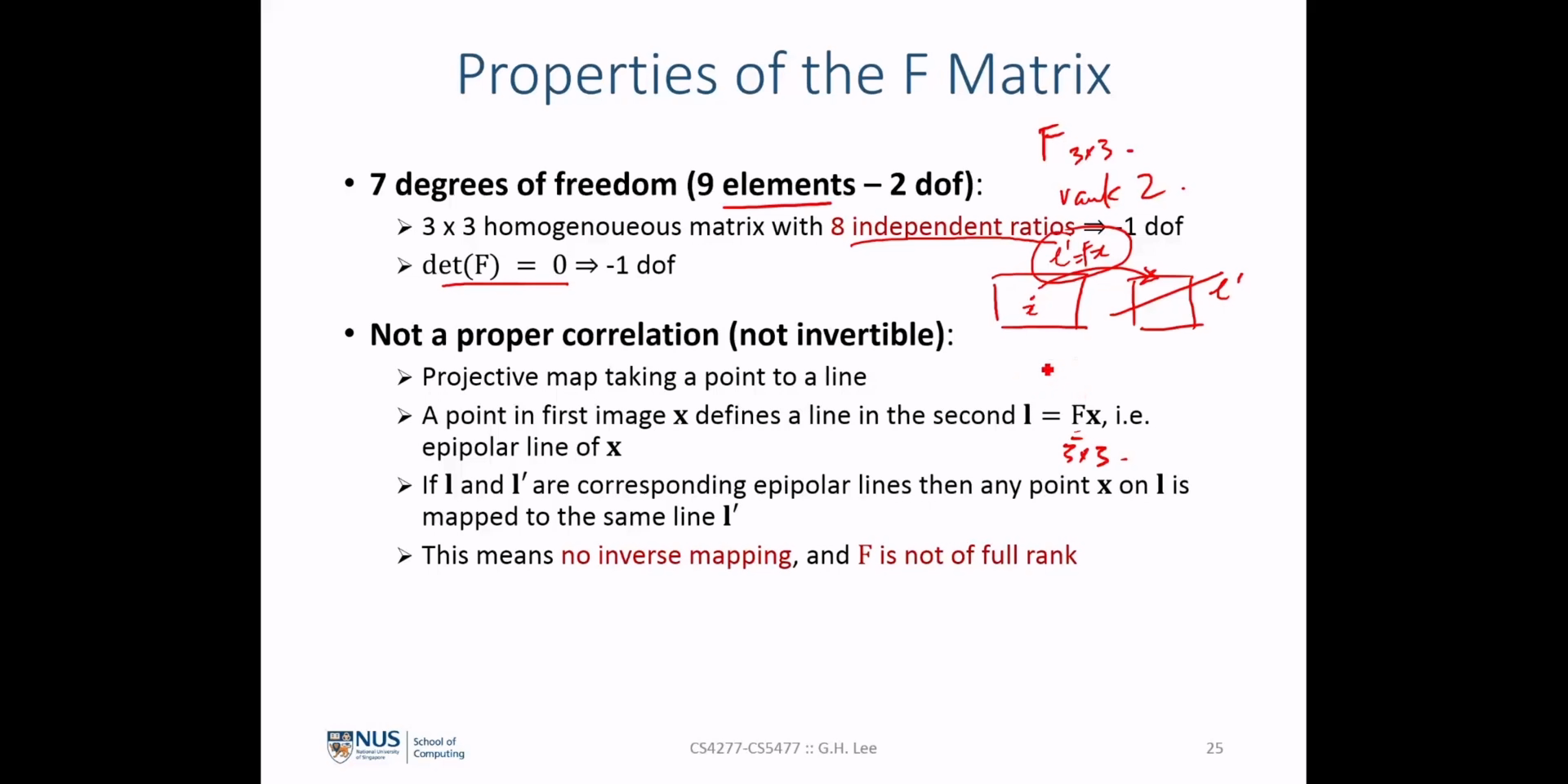
- 앞에서 설명한 바와 같이 \(F\) 는
7-DOF를 가집니다. 9개의 elements 중scale ambiguity와Rank-2 constraint로 2개의 DOF가 제외되어 최종적으로7-DOF를 가지게 됩니다.
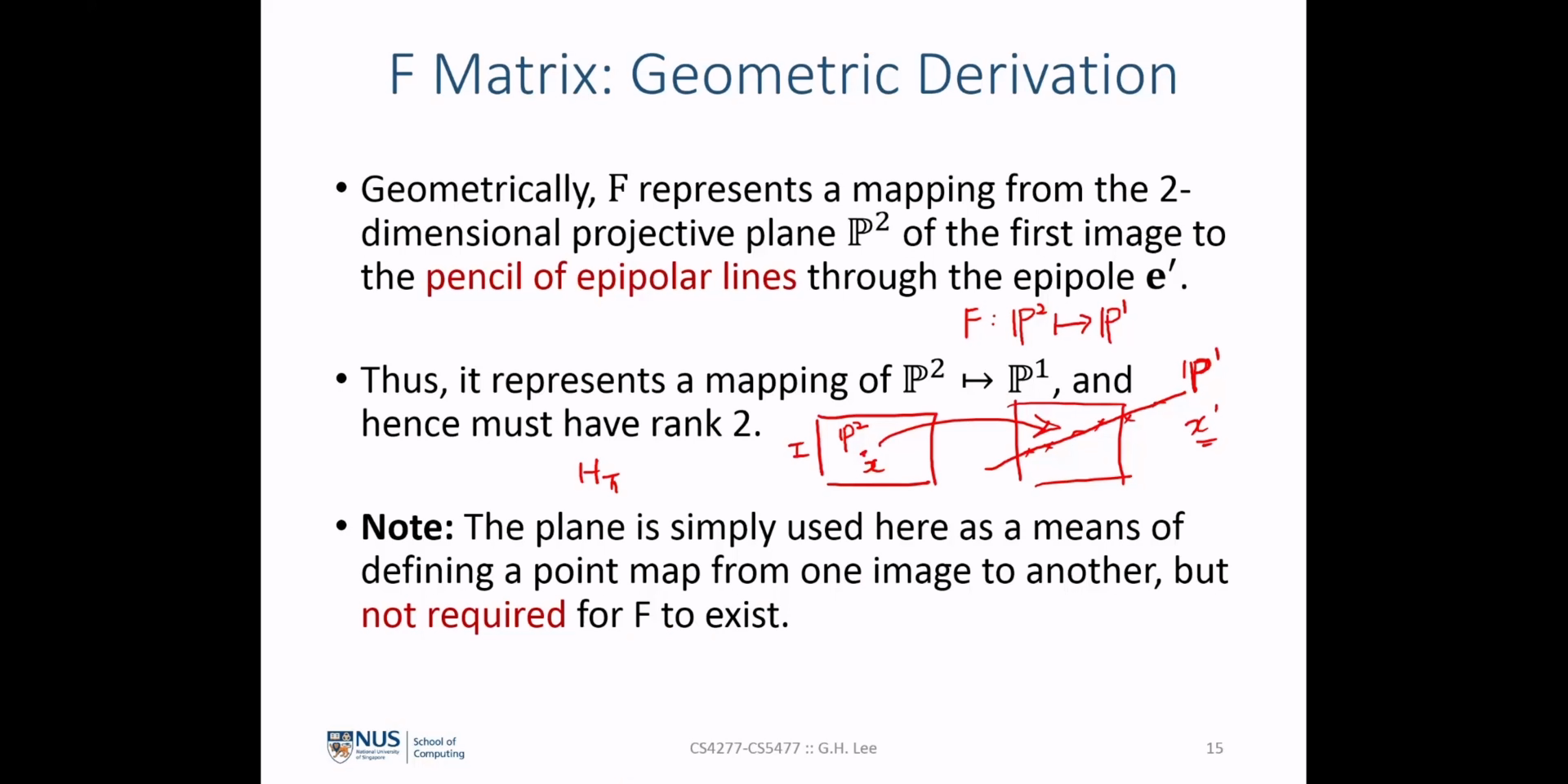
Fundamental Matrix는 임의의 포인트 \(x\) 를epipolar line\(l'\) 로 변환하는 행렬입니다. 즉, 점을 선으로 매핑하는 관계를 가지게 됩니다.- 첫번째 카메라에서 형성되는 \(l\) 과 두번째 카메라에서 형성되는 \(l'\) 은
corresponding epipolar lines라고 부르며 \(l\) 선상에 있는 임의의 점 \(x\) 를 \(F\) 통해 매핑하였을 때, \(l'\) 선상에 위치하게 됩니다. 물론 그 반대 관계도 성립합니다. - 이와 같은 점 → 선으로의 매핑 관계를 가지므로 역관계는 가질 수 없습니다. (1:1 대응이 되지 않기 때문입니다.) 이와 같은 조건이 \(F\) 가
full rank가 될 수 없는 이유이기도 합니다.
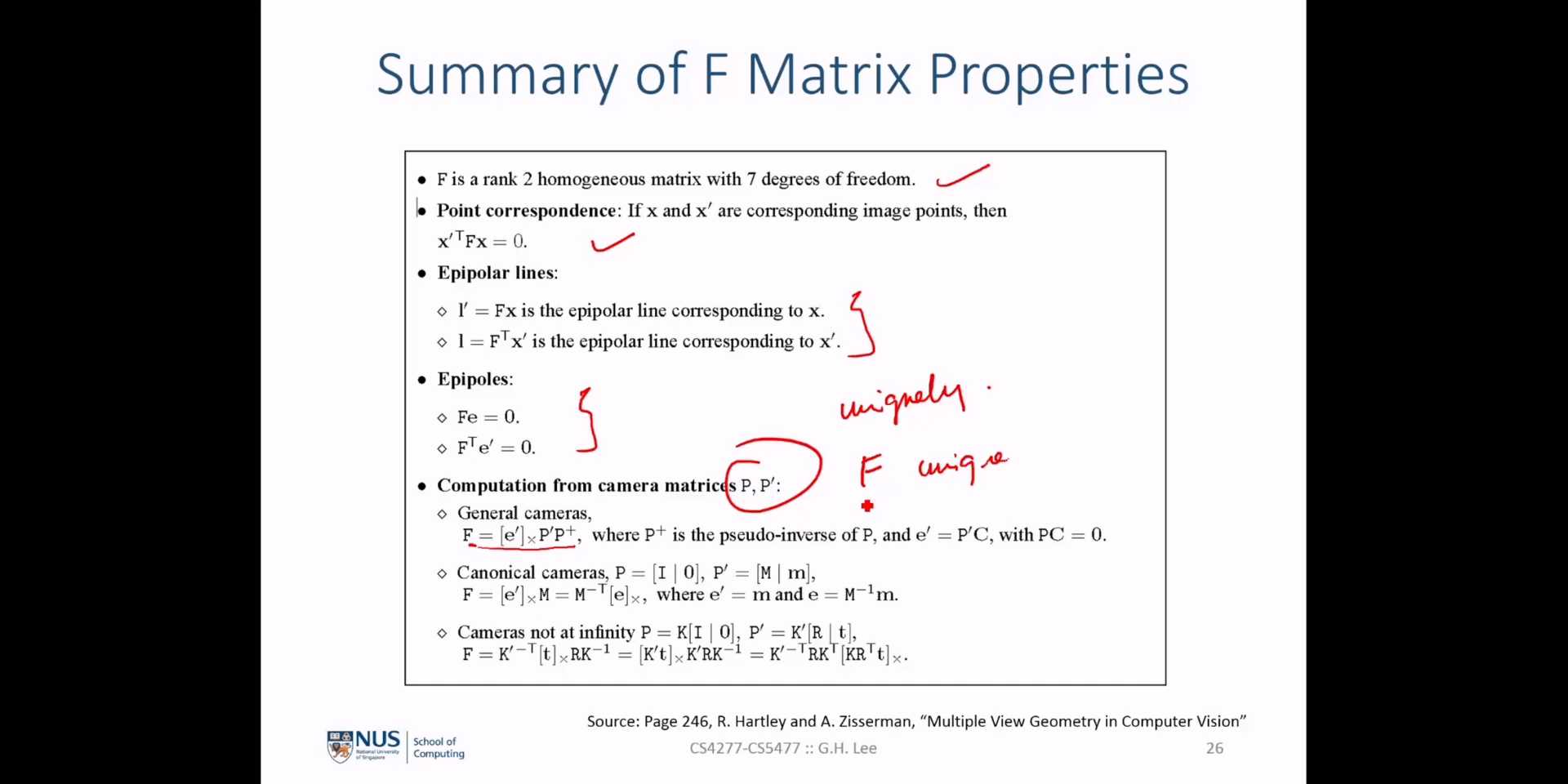
- 지금까지 살펴본
Fundamental Matrix내용을 살펴보면 위 표와 같습니다.
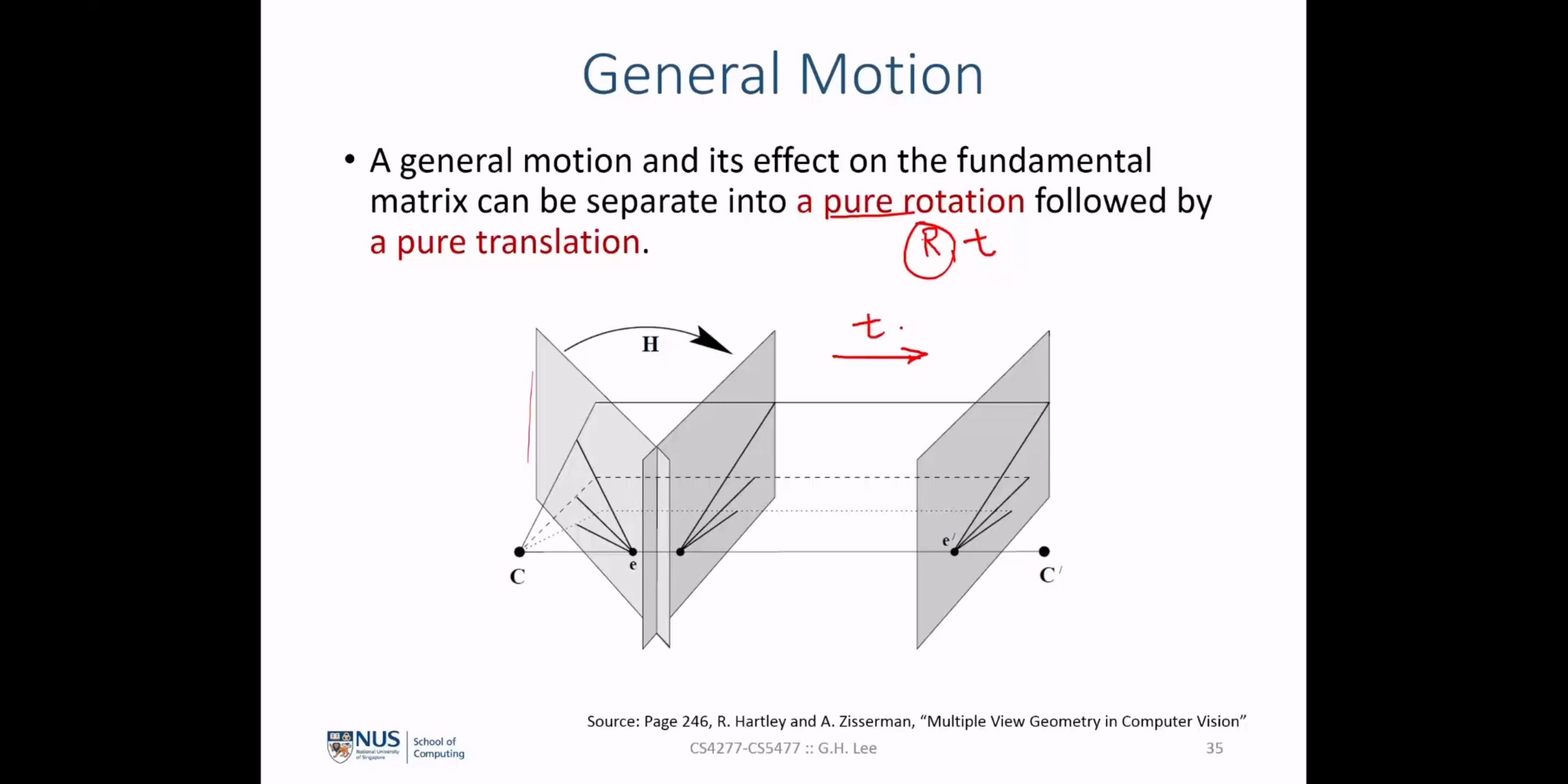
- 이번 강의에서는 앞의 강의에서 다룬
Fundamental Matrix를 이용하여 개념을 좀 더 확장해 보도록 하겠습니다. - 먼저
Epipolar Line의 관계를 정의하는Epipolar Line Homography부터 다루어 보도록 하겠습니다.
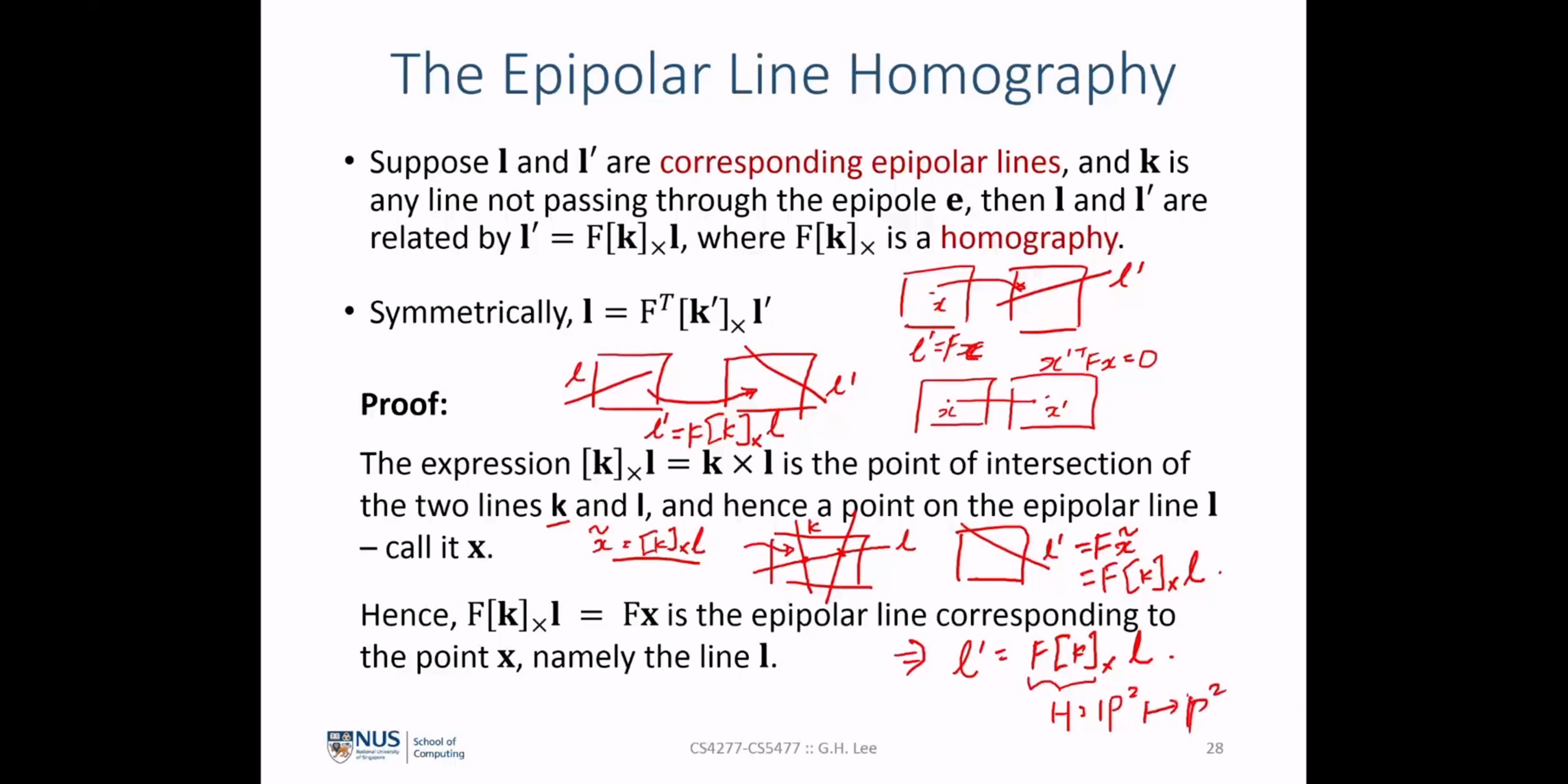
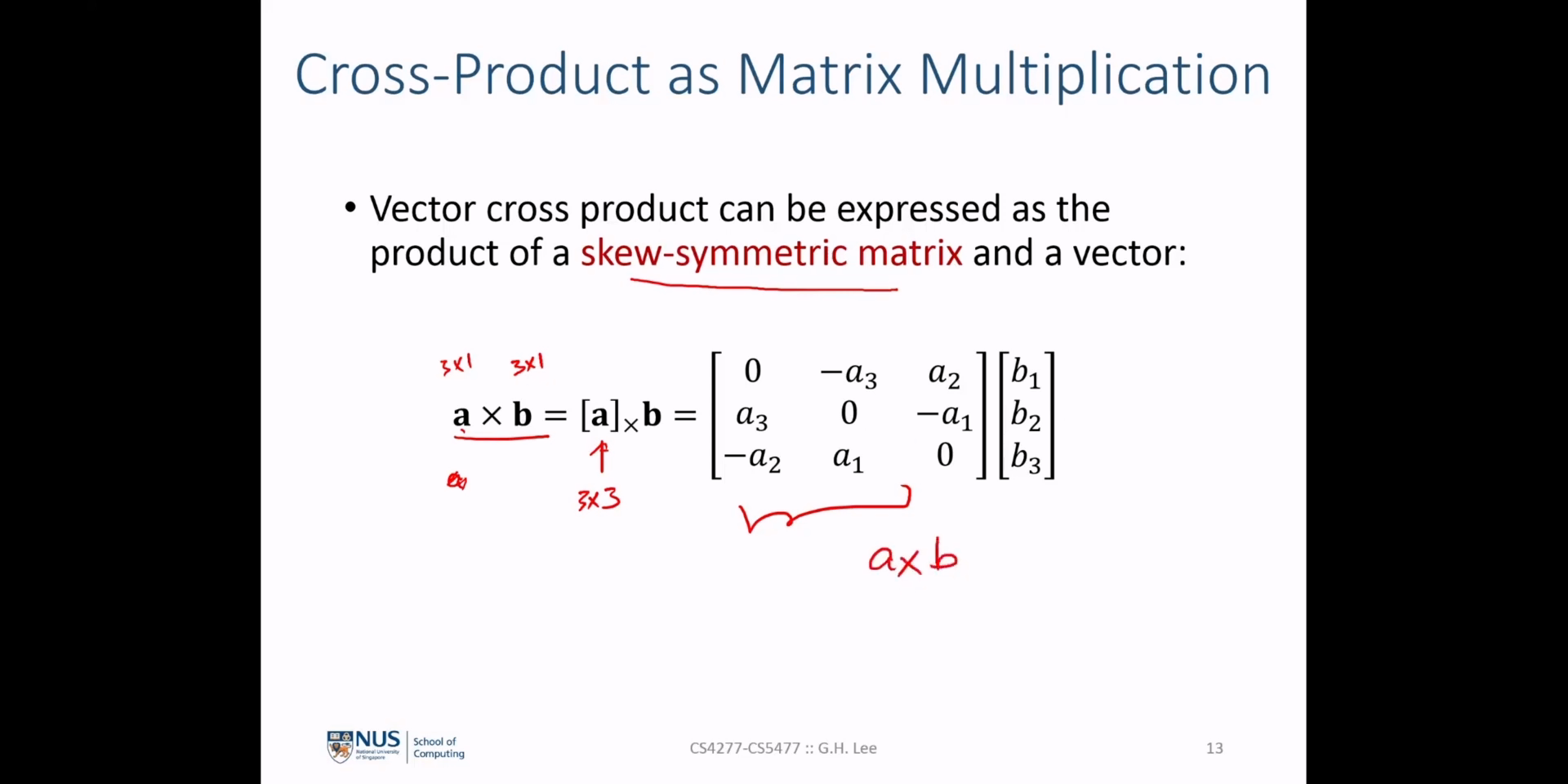
corresponding epipolar line인 \(l\) 과 \(l'\) 가 있고epipole\(e\) 를 통과하지 않는 임의의 선 \(k\) 가 있다고 가정하겠습니다. 이 때, \(l' = F[k]_{\times}l\) 을 만족하며 \(F[k]_{\times}\) 는 \(l\) 과 \(l'\) 사이의 관계를 정의하는homography역할을 합니다.- 대칭 관계를 이용하면 \(l = F^{T}[k']_{\times} l'\) 을 만족합니다.
- 이 관계가 성립하는 이유는 간단히 \([k]_{\times} l = k \times l = x\) 가 성립하기 때문입니다. 즉
epipolar line과 임의의 선 \(k\) 의cross product를 통해 교차점에서 \(x\) 를 도출해 낼 수 있습니다. (교차점이기 때문에 \(x\) 는 \(l\) 상에 존재합니다.) - 따라서 \(F[k]_{\times}l = Fx = l'\) 를 만족하며 그 결과 \(x\) 와 \(l\) 에 대응되는
epipolar line\(l'\) 가 됨을 알 수 있습니다.
- 따라서 \(l\) 과 \(l'\) 간의 변환 관계인
homography는 \(F[k]_{\times}\) 와 \(F^{T}[k']_{\times}\) 가 됨을 알 수 있었습니다.
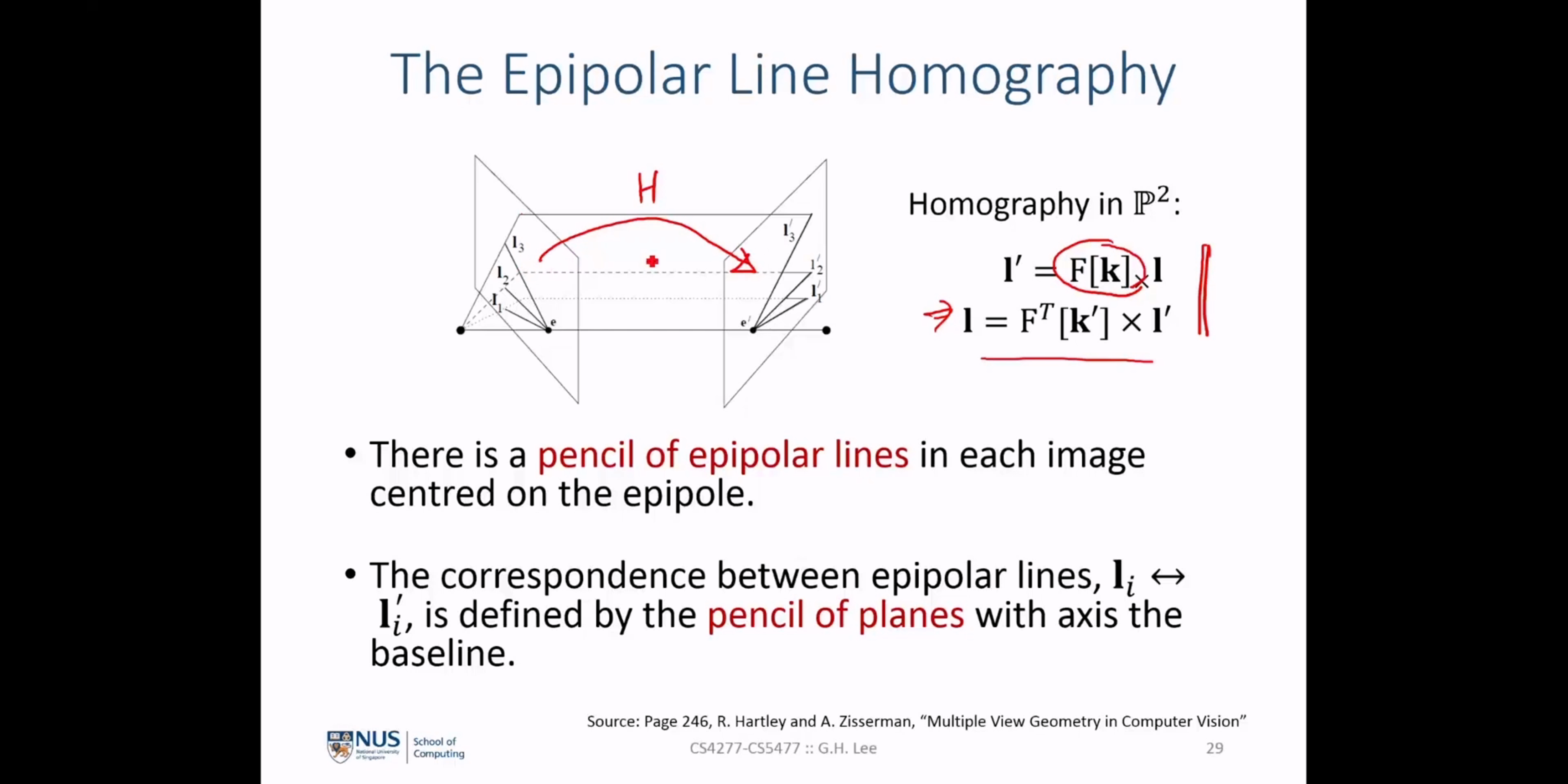
- 위 그림과 같이 \(l_{i}\) 는 \(l'_{i}\) 와 대응되는 관계입니다. 앞에서 이러한 관계를
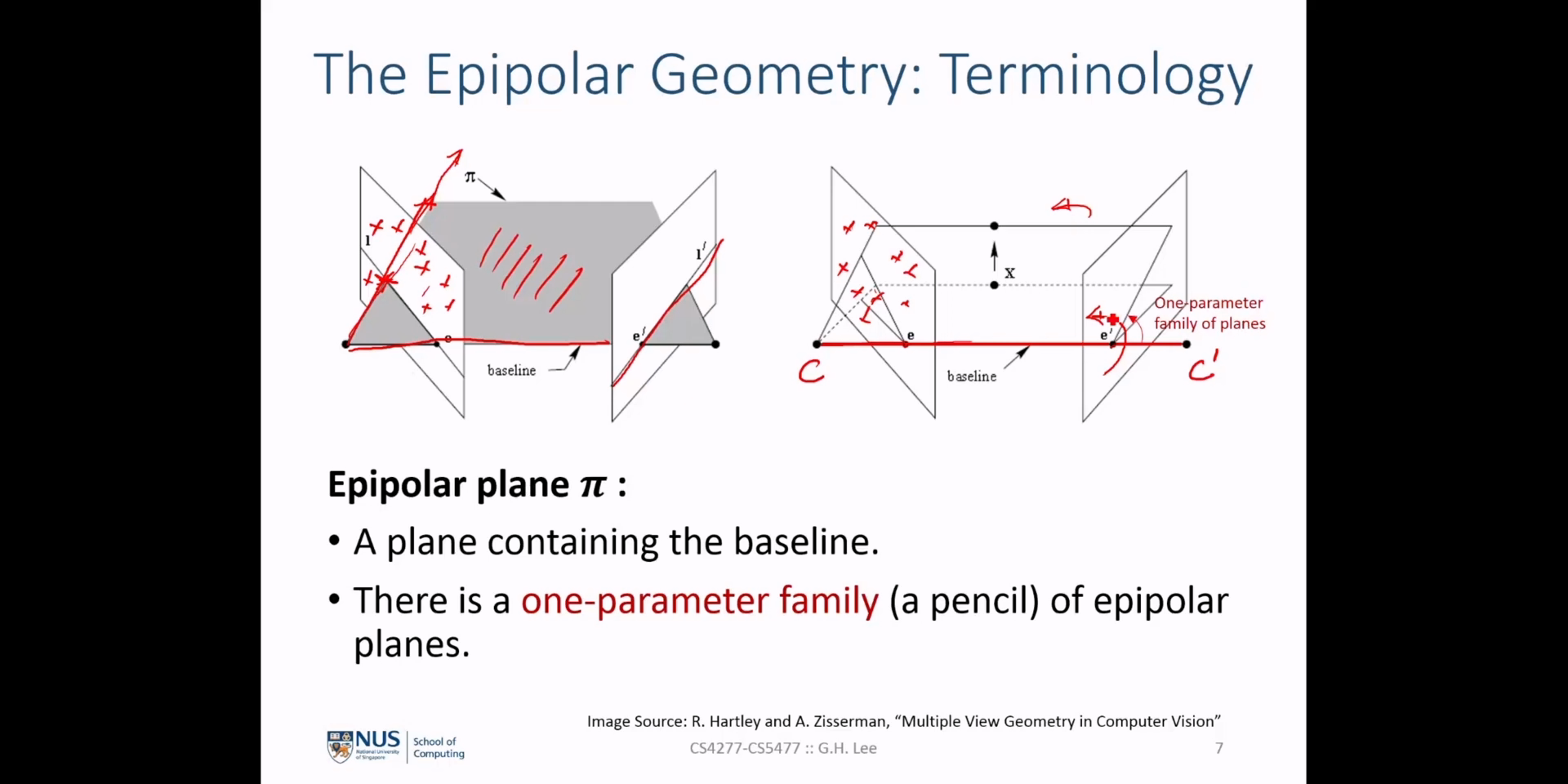
correspondence라고 언급하였었습니다. 대응되는epipolar lines는 각각의 이미지에서epipole\(e\) 와 \(e'\) 를 공통적인 교점으로 가지고 있습니다. 이와 같이 하나의 공통 요소를 가지고 있는 집합을pencil이라고 부릅니다. 따라서 위 그림은pencil of epipolar lines를 나타냅니다. epipolar line\(l_{i}\) 와 \(l'_{i}\) 그리고base line을 통해plane을 만들 수 있습니다. 각 대응되는epipolar line을 통해 다양한plane을 만들 수 있고 공통 요소인base line을 가지므로 이렇게 만들어진plane을pencil of planes라고 합니다. 물론 공통 요소는base line이 됩니다.
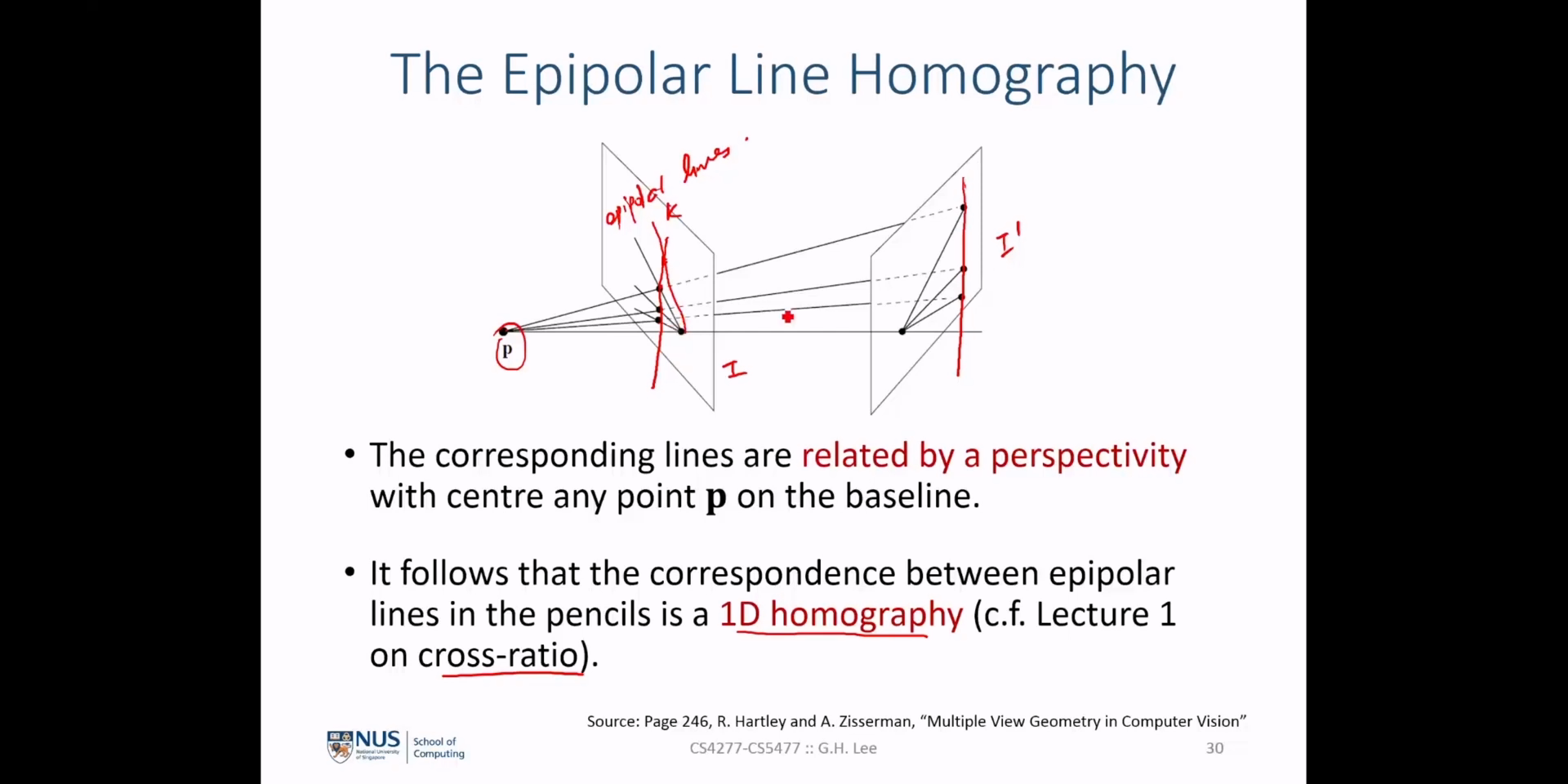
base line상의 임의의 점 \(p\) 를 중심으로 두 이미지 \(I, I'\) 에 대하여 선을 긋는 상황을 살펴보도록 하겠습니다.pencil of epipolar lines과epipole\(e\) 를 통과하지 않는 임의의 선 \(k\) 와 교차하는 점을 이미지 \(I, I'\) 에 검은 점으로 표현하였습니다. 점 \(p\) 에서 부터 \(I, I'\) 의 검은 점을 연결하는 직선을 그엇다고 가정하겠습니다.- 두 이미지 \(I, I'\) 간의 점들이
homography (Perspective Transform)변환 관계이므로 점들 간의 cross-ratio는 만족함을 알 수 있습니다.
- 슬라이드에서
1D homography는 다음을 만족하는homography를 의미합니다.
- \[l' = H_{ll'} l\]
- \[l = [a, b, c]^{T} = e + td\]
- \[l' = [a', b', c']^{T} = e' + t'd'\]
- \[t \text{ : scale parameter}\]
- \[d \text{ : direction vector}\]
- 이번에는
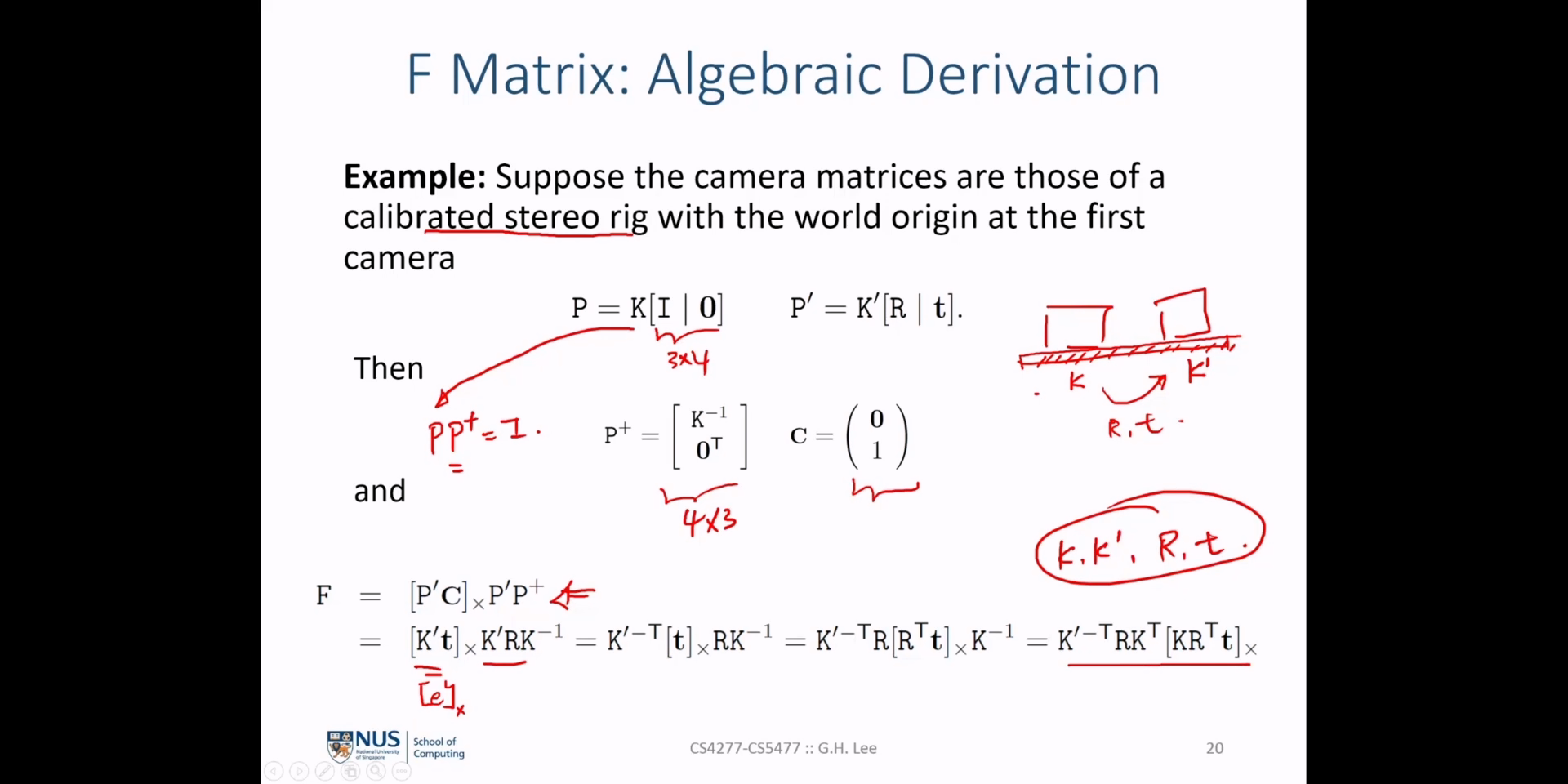
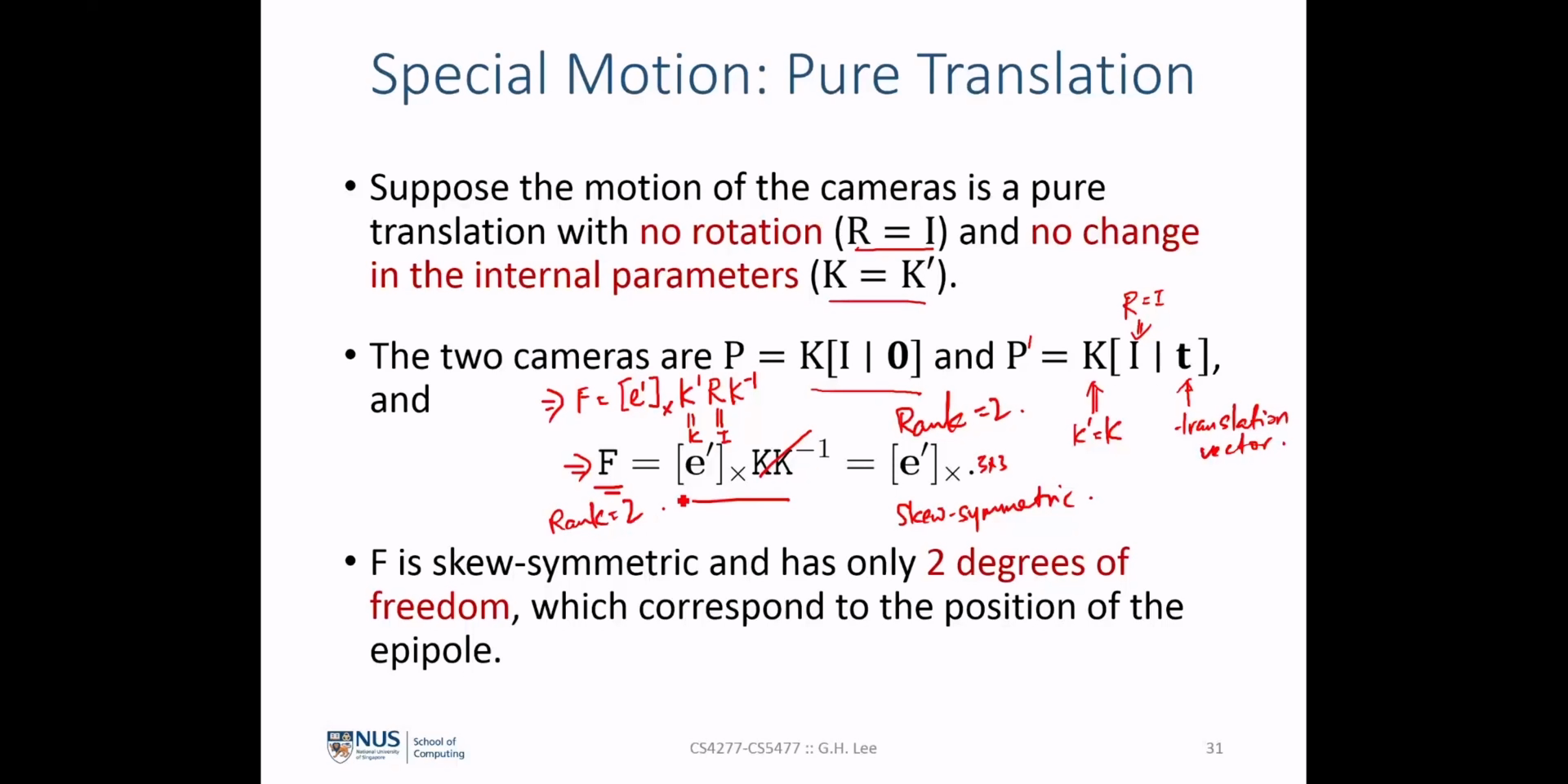
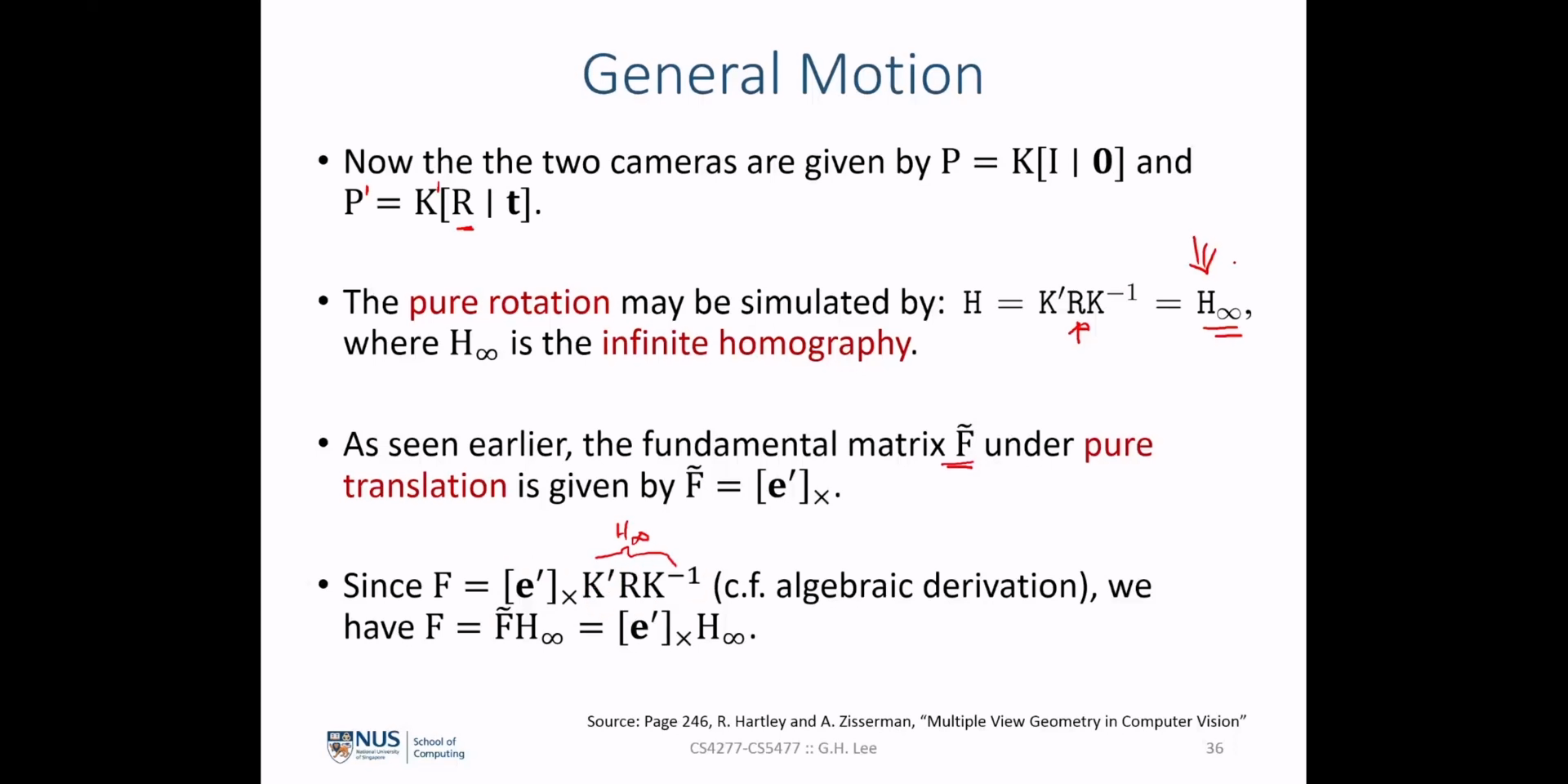
Pure Translation이 발생하였을 때의Fundamental Matrix를 살펴보도록 하겠습니다.Pure Translation이라고 하면 하나의 카메라를 이동시켰을 때,Rotation은 발생하지 않고 단순히Translation만 발생한 경우를 의미합니다. 카메라 하나를 이용한 2개의 이미지 이므로intrinsic\(K\) 는 하나입니다. - 20p 슬라이드 내용을 통하여
Fundamental Matrix\(F\) 를 다음과 같이 정의할 수 있었습니다.
- \[F = [e']_{\times} K' R K^{-1}\]
- 여기서 \(R = I\) 가 되고 \(K'=K\) 이므로 식을 다음과 같이 정리할 수 있습니다.
- \[F = [e']_{\times} K' R K^{-1} = [e']_{\times} K I K^{-1} = [e']_{\times}\]
skew-symmetric형태의 \([e']_{\times}\) 는epipole의 값에 의해 결정됩니다.epipole\(e'\) 는 \((x', y', 1)\) 의 좌표값을 가지므로2-DOF를 가지게 됩니다. 즉, \(e'\) 좌표값에 의해Fundamental Matrix가 결정됩니다.
- \[F = [e']_{\times} = \begin{bmatrix} 0 & -1 & y' \\ 1 & 0 & -x' \\ -y' & x' & 0 \end{bmatrix}\]
skew-symmetric\(n \times n\) 행렬에서 \(n\) 의 크기가 홀수이면 최대rank는 \(n-1\) 임이 알려져 있습니다.skew-symmetric행렬의 정의는 다음과 같습니다.- ① \(A = -A^{T}\)
- ② \(\text{All diagonal elements are zero.}\)
- 따라서 행렬 \(A\) 는 다음과 같이
determinant를 적용할 수 있습니다.
- \[\text{det}(A) = \text{det}(-A^{T}) = (-1)^{n}\text{det}(A)\]
- \[\text{det}(A) = -\text{det}(A) \quad (\because n = 3 \text{ is odd.})\]
- \[\therefore \text{det}(A) = 0\]
- 위 식과 같이 \(\text{det}(A) = 0\) 를 만족하므로 최대
rank는 \(n - 1\) 이 되고 앞에서 다룬 바와 같이Fundamental Matrix의rank\(3 - 1 = 2\) 를 만족하게 됩니다.
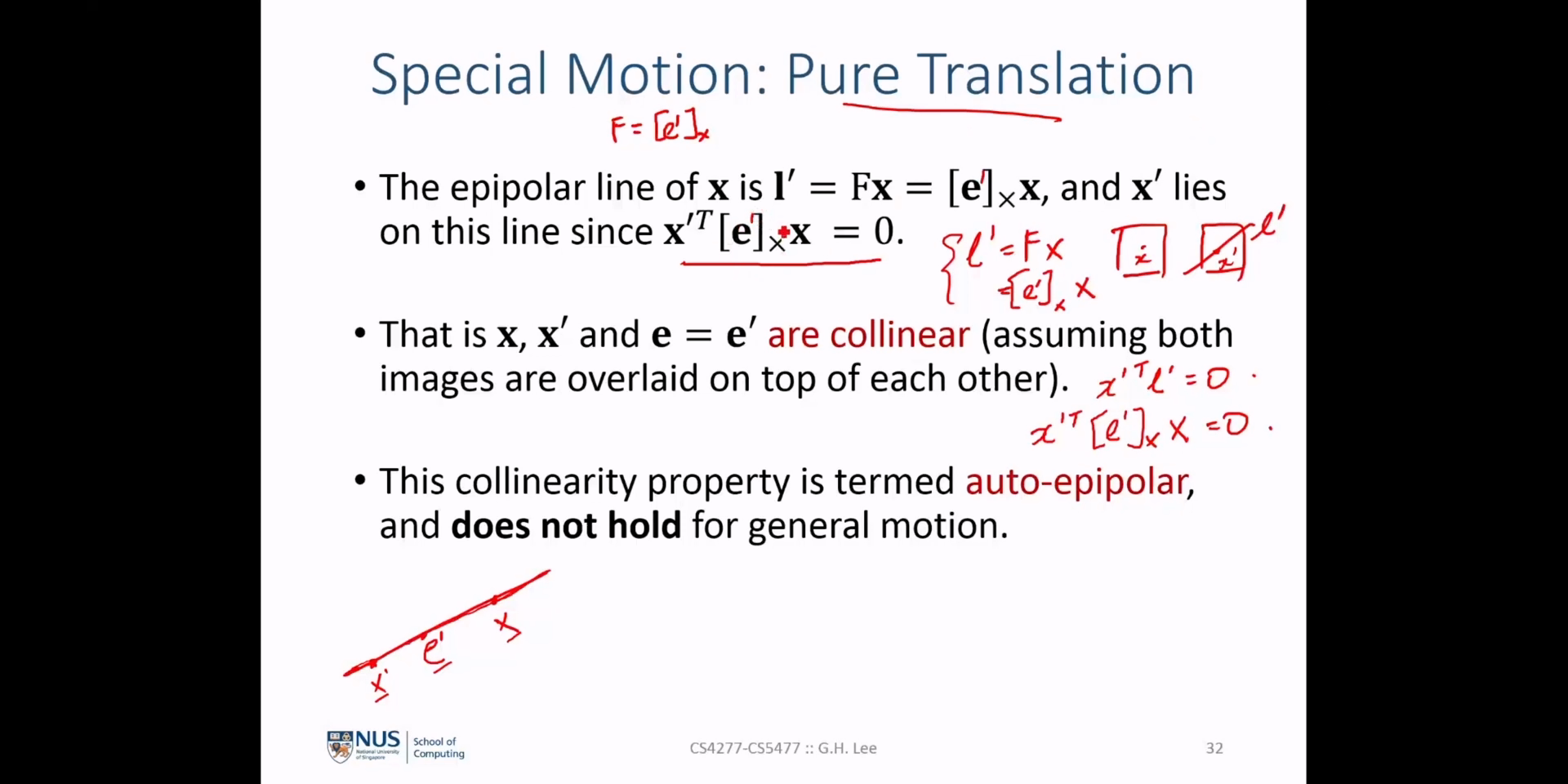
Pure Translation조건에서 다음 조건이 만족함을 확인할 수 있습니다.
- \[l' = Fx = [e']_{\times}x\]
- 그리고 \(x'\) 는 \(l'\) 상에 존재하므로 다음과 같이 식을 적을 수 있습니다.
- \[x'^{T}[e']_{\times}x = 0\]
- 위 식을 해석하면 \(x'\) 와 \(e'\) 는 같은 선상에 있고 (
epipolar line) 심지어 \(x\) 또한 같은 선상에 있으므로 \(x, x', e=e'\) 가 같은 선상에 있는 것으로 이해할 수 있습니다. 따라서collinear관계임을 확인할 수 있습니다.
- 참조 : https://www.geeksforgeeks.org/python-opencv-epipolar-geometry/
- 현재 다루고 있는
Pure Translation의 경우 위 그림과 같이 2개의 이미지가 평행한 상태입니다. - 위 그림과 같이 두 이미지 평면이 평행할 때 두 카메라 중심을 연결하는 기준선이 이미지 평면과 평행하므로
epipole\(e\) 와 \(e'\) 는 무한대에 위치하고epipolar line은 각 이미지 평면의 \(u\) 축과 평행합니다. - 이전 강의에서 무한대에 존재하는 점을
point at infinity라고 하였으며vanishing point라는 이름으로 다루기도 하였습니다. 즉, 평행하는 두 이미지의epipole은vanishing point가 됩니다.
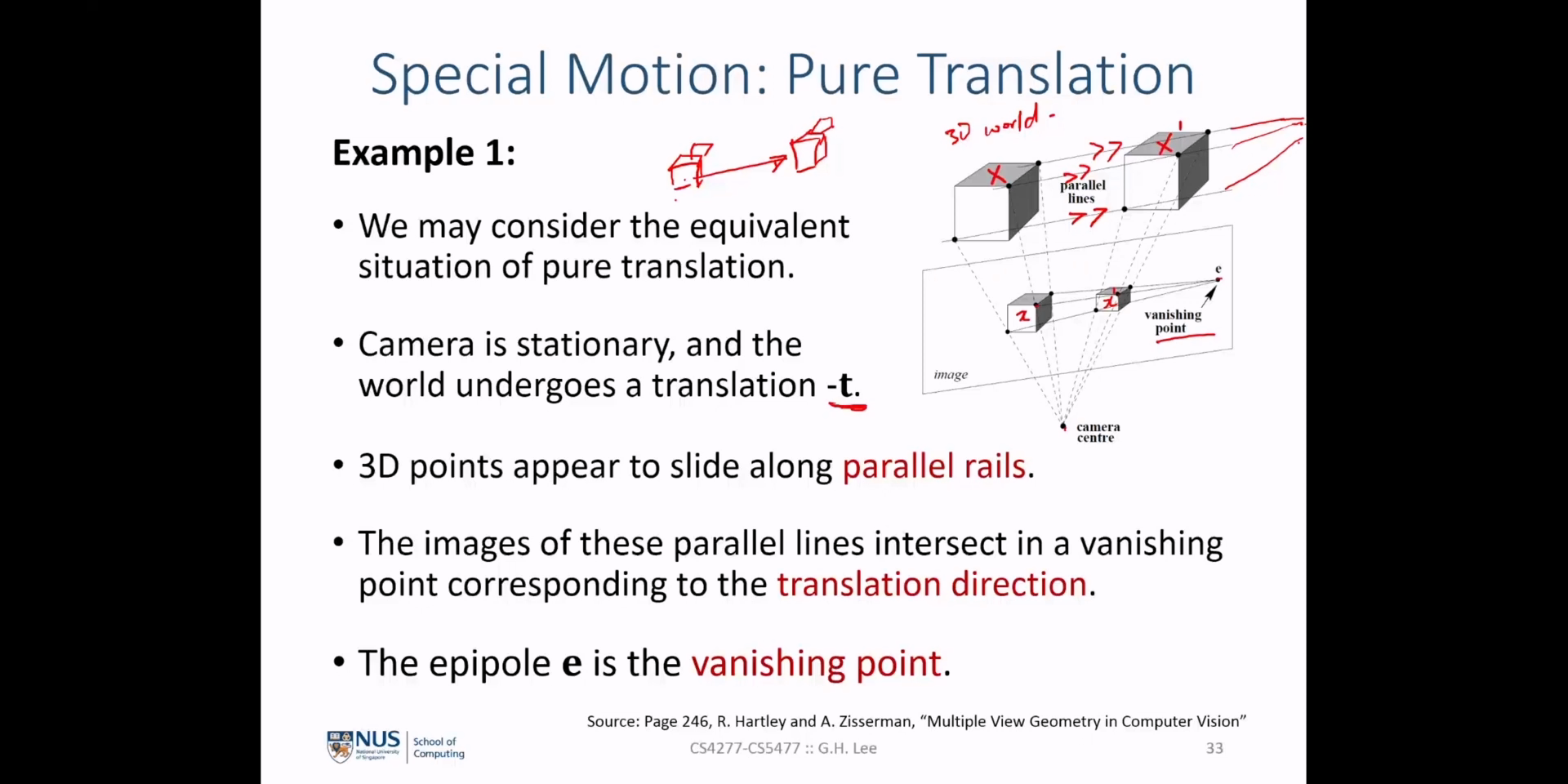
- 위 예시는
Pure Translation을 가정한 예시입니다. 카메라는 고정인 상태로 세상만 \(-t\) 만큼translation하였다는 가정입니다. - 앞의 슬라이드에서 다루었듯이
Pure Translation상태에서는 \(x, x', e\) 가 모두collinear함을 확인하였습니다. 따라서 두 직육면체의 대응되는 점들을 이어서 선을 만들었을 때, 그 선이 모이는 지점의vanishing point가epipole\(e\) 가 됩니다. \(e\) 에서pencil of epipolar lines가 형성되는 것을 볼 수 있습니다.
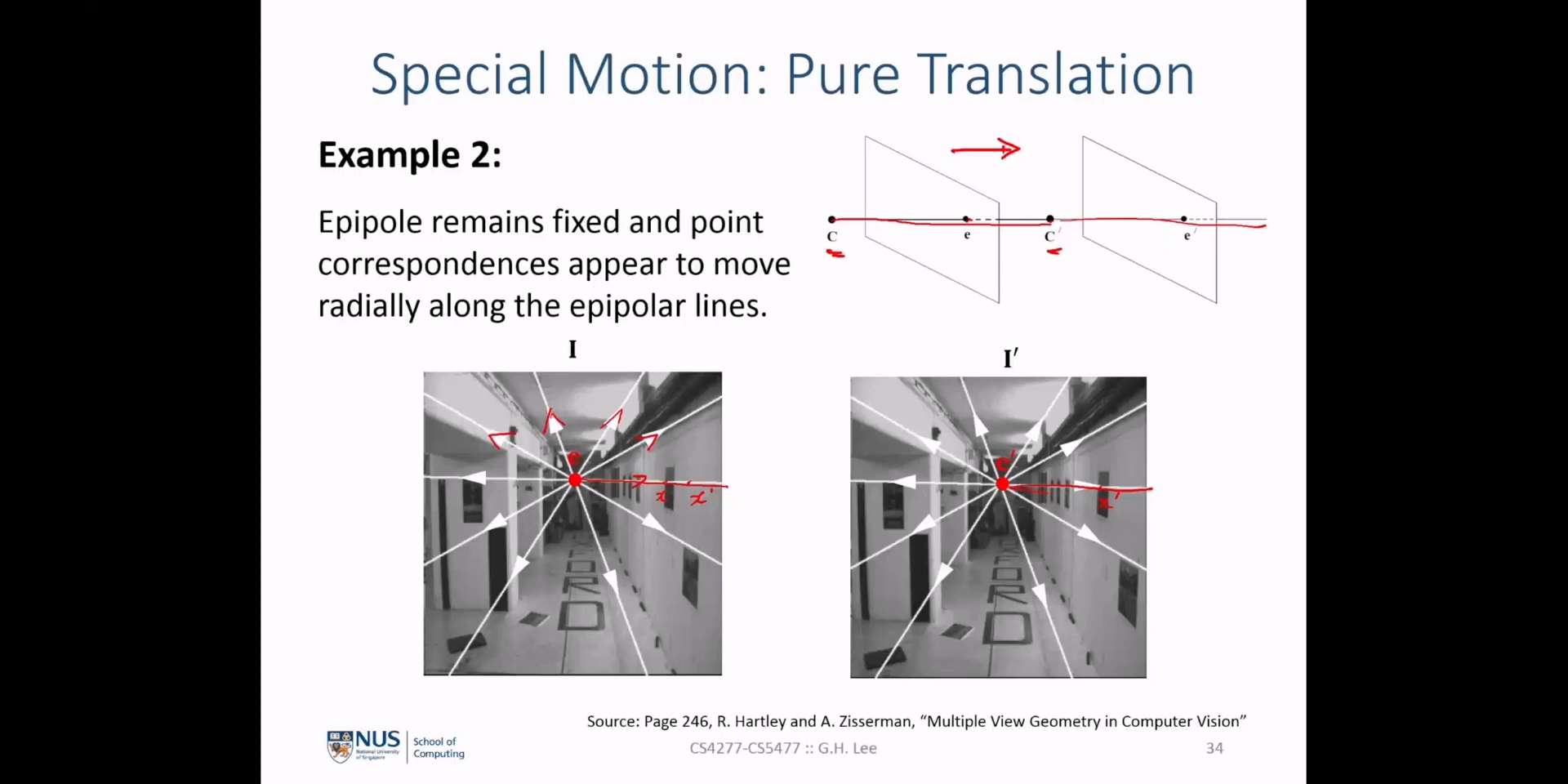
- 두번째 예시에서도
Pure Translation임을 가정합니다. 따라서 카메라 이동 발생 시 카메라 중점 \(C\) 의 위치는collinear한 상태로 이동하게 됩니다. 따라서 \(e = e'\) 를 만족합니다. Pure Translation이 발생하였으므로epipolar line또한 그대로 유지됩니다. 하지만 \(x, x'\) 는 카메라의 움직임 때문에 실제 이미지 상의 위치는 옮겨질 것입니다. 따라서correspondent point인 \(x, x'\) 는Pure Translation시 이미지 상의 위치 이동은 발생하되epipolar line을 따라서 움직이게 되어epipolar line은 그대로 유지됩니다.
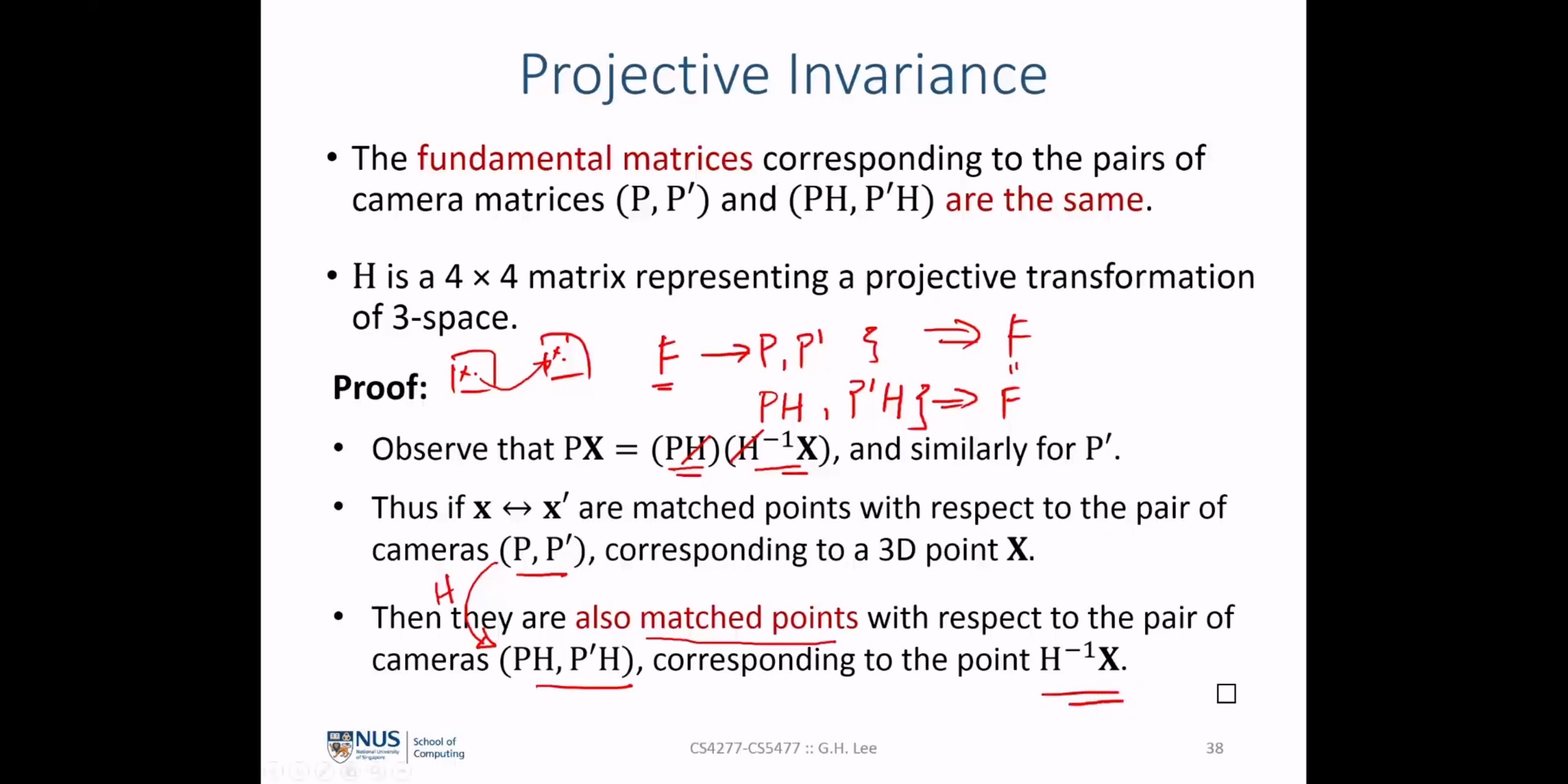
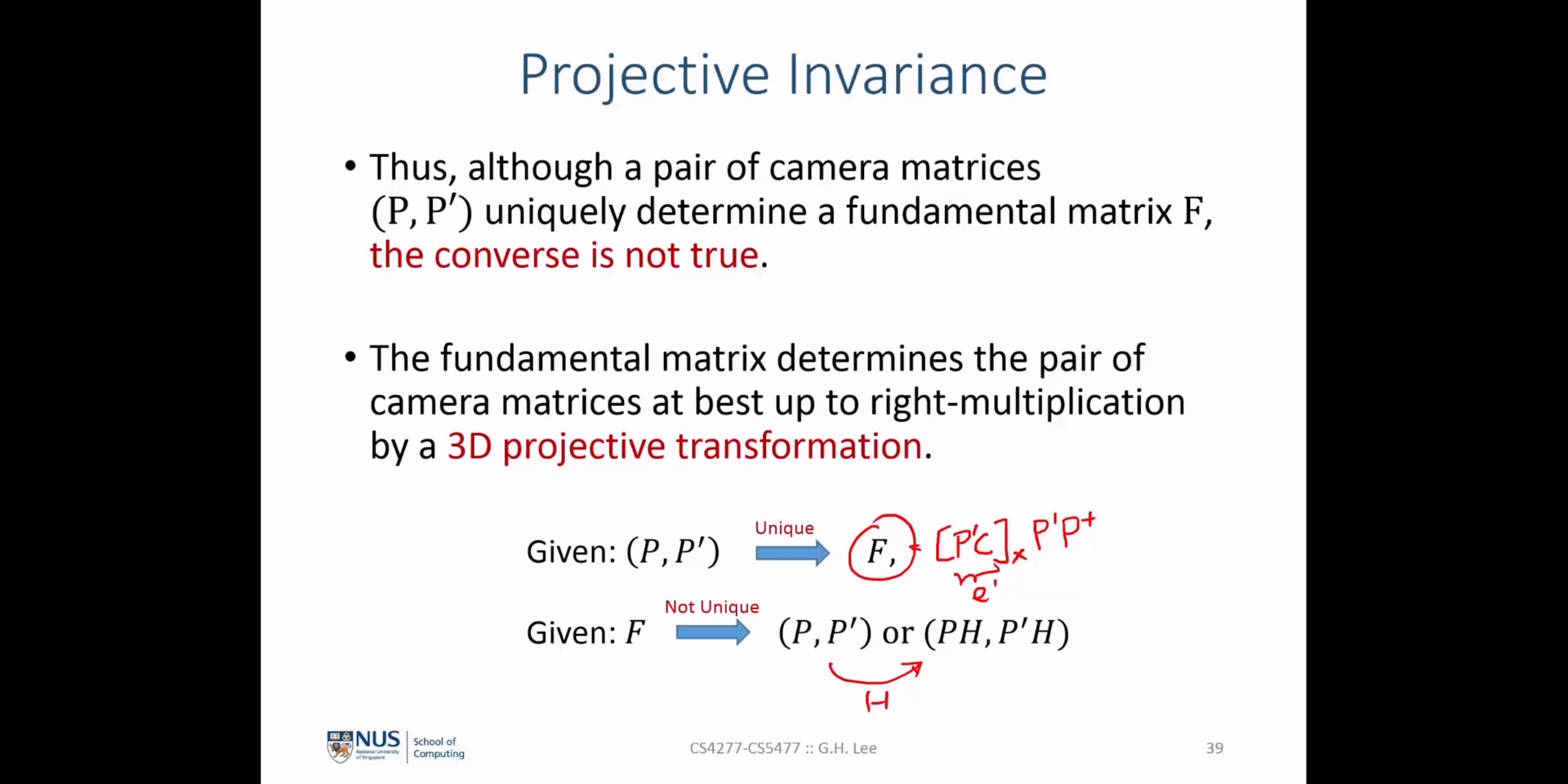
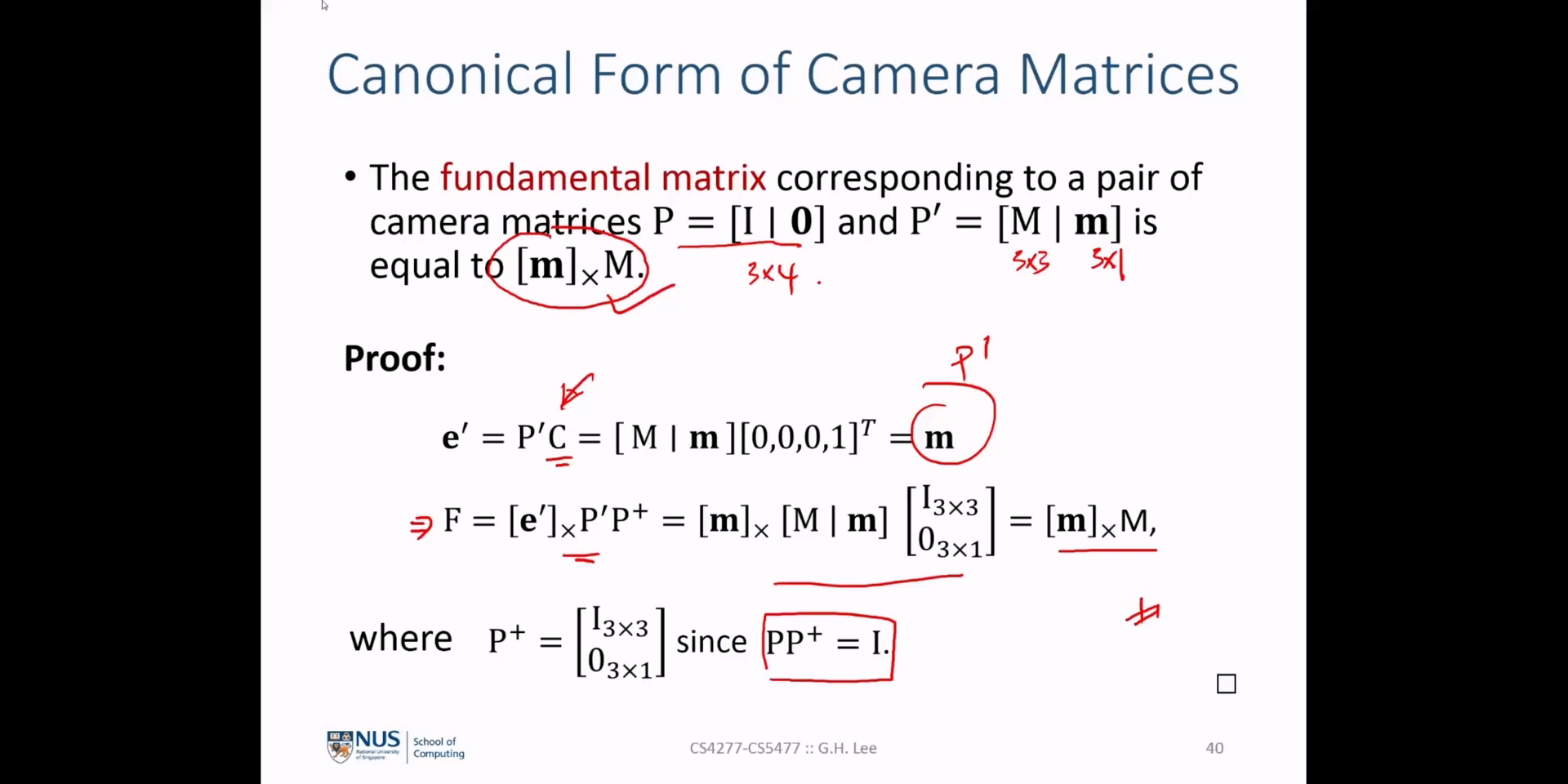

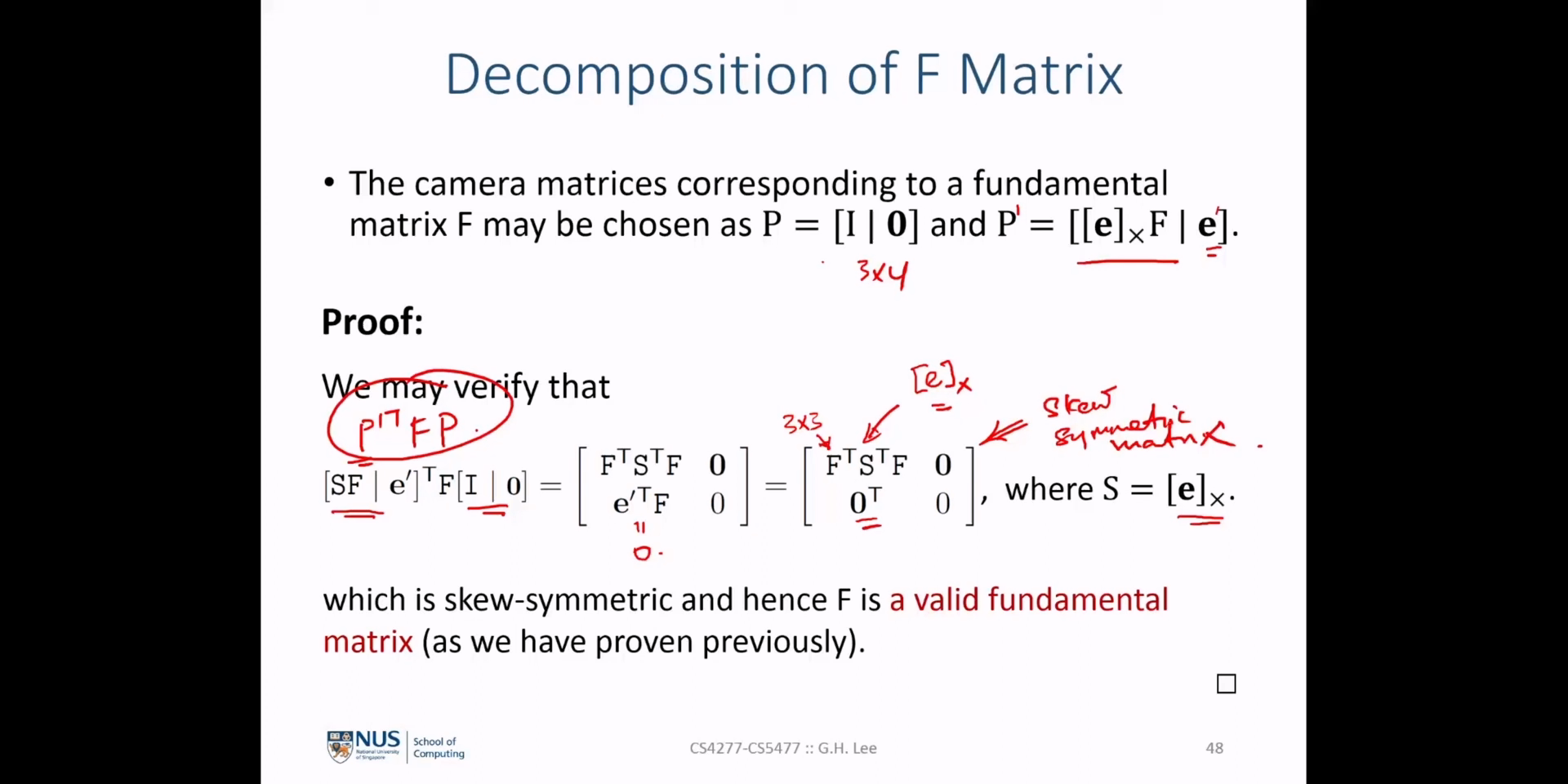
- 40p에서 보여준 바와 같이
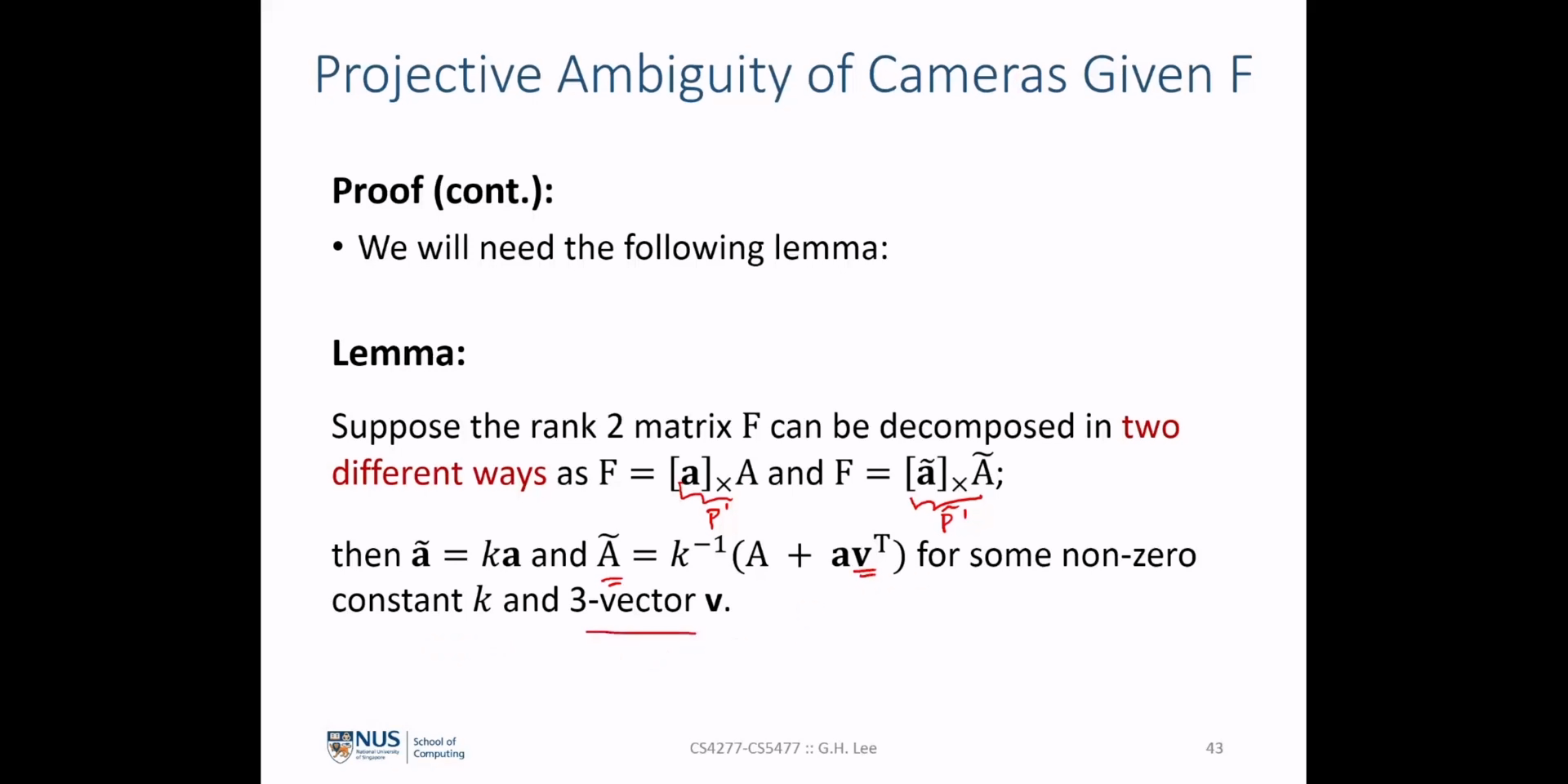
canonical form형태의 행렬 \(P\) 와 그에 대응되는 행렬 \(P'\) 를 이용할 때, \(F = [a]_{\times} A\) 가 됨을 확인하였습니다. 같은 논리로 \(F = [\tilde{a}]_{\times} \tilde{A}\) 또한 만족합니다. - 그리고 벡터 \(a\) 의
cross product\(a \times a = 0\) 이기 때문에 다음과 같이 식이 유도될 수 있습니다.
- \[a^{T}F = a^{T}[a]_{\times}A = 0\]
- \[\tilde{a}^{T}F = \tilde{a}^{T}[\tilde{a}]_{\times}\tilde{A} = 0\]
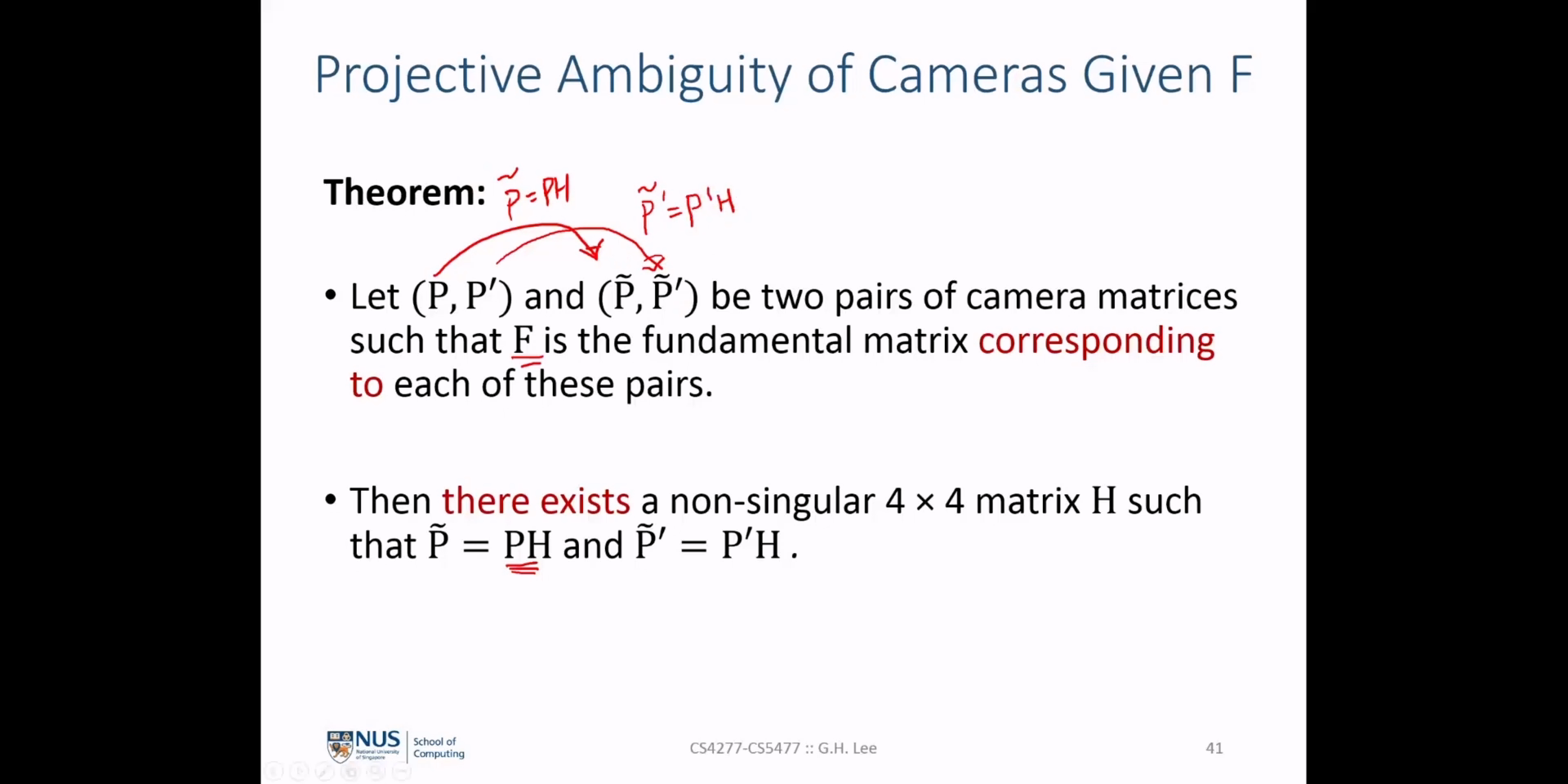
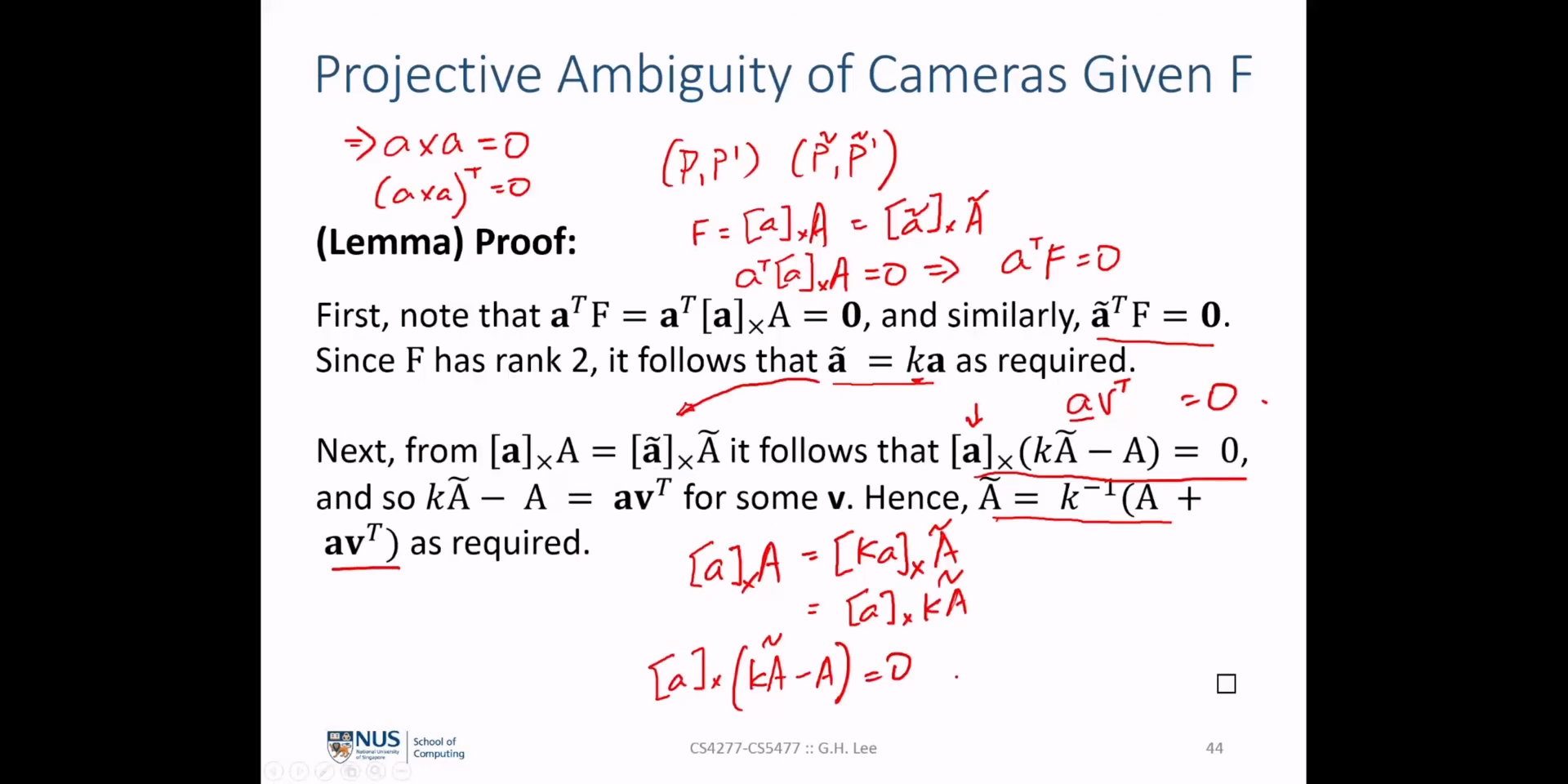
Fundamental Matrix\(F\) 는 앞에서 살펴본 바와 같이rank가 2이므로null-space를 가집니다.- 따라서 \(a^{T}F = \tilde{a}^{T}F = 0\) 에서 \(a, \tilde{a}\) 각각은 같은 \(F\) 에 대한
null-space를 가지므로 \(\tilde{a} = ka\) 와 같이dependent하게 표현할 수 있습니다. - 또는 \(\tilde{a}^{T}F = \tilde{a}^{T}[a]_{\times}A = 0\) 을 항상 만족하기 위해서는 \(\tilde{a}^{T}[a]_{\times}\) 가 항상 \(0\) 을 만족해야 하므로 이 조건을 만족하기 위해서는
cross proudct가 0이 되는 \(\tilde{a} = ka\) 조건을 만족해야 하는 것으로도 해석할 수 있습니다. - 따라서 \(\tilde{a} = ka\) 를 이용하면 다음과 같이 식을 전개할 수 있습니다.
- \[[a]_{\times}A = [\tilde{a}]_{\times}\tilde{A}\]
- \[[a]_{\times}(k\tilde{A} - A) = 0\]
- 위 식을 만족하려면 \([a]_{\times}\) 와 \(a\) 의
cross product연산을 통해 항상 0 벡터가 만들어 질 수 있도록 구성해야 합니다. 따라서 \(k\tilde{A} - A = av^{T}\) 로 정의할 수 있습니다. 이 때, \(v\) 는 임의의 벡터입니다. 정리하면 \(\tilde{A}\) 는 다음과 같습니다.
- \[\tilde{A} = k^{-1}(A + av^{T})\]
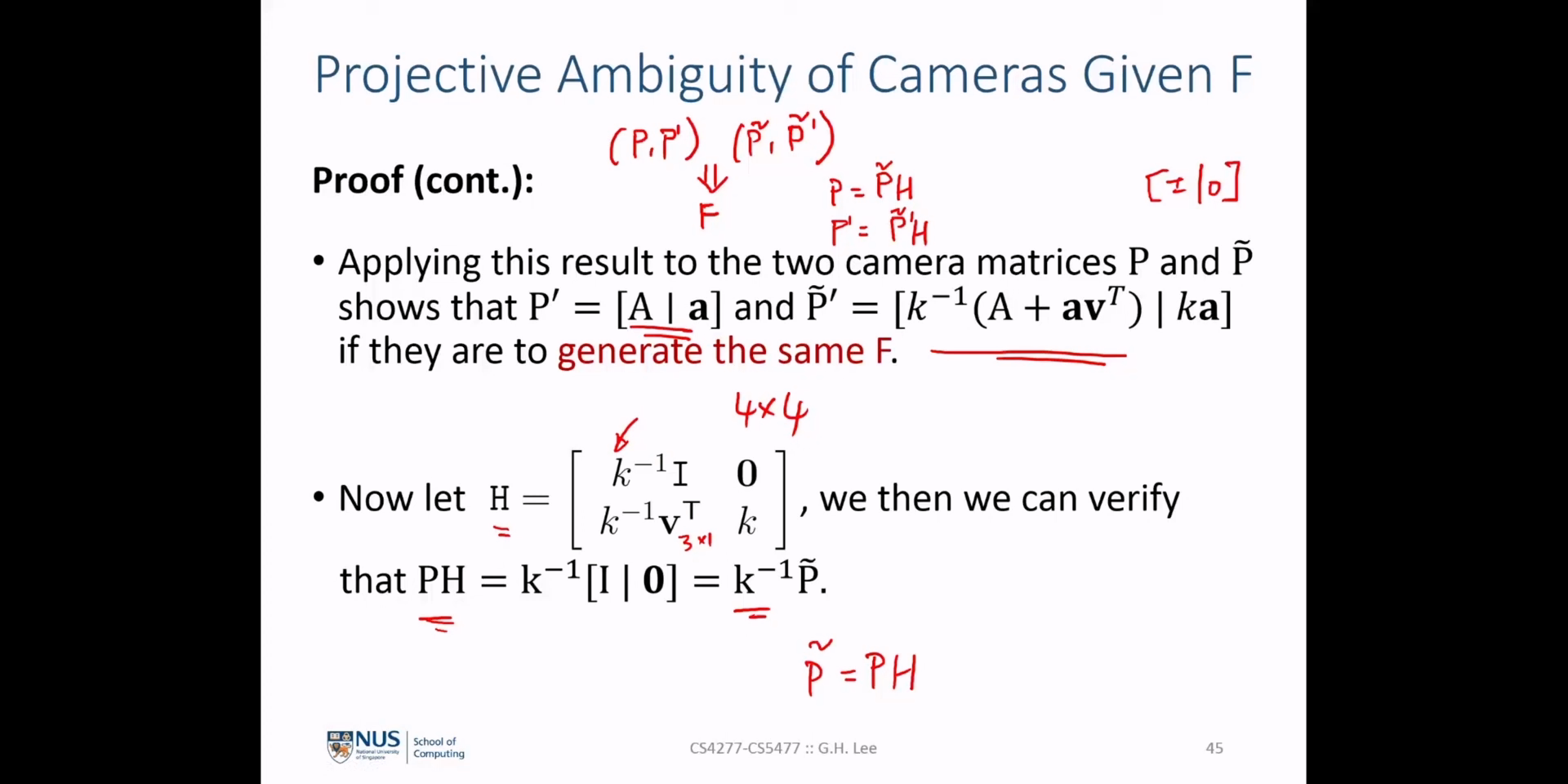
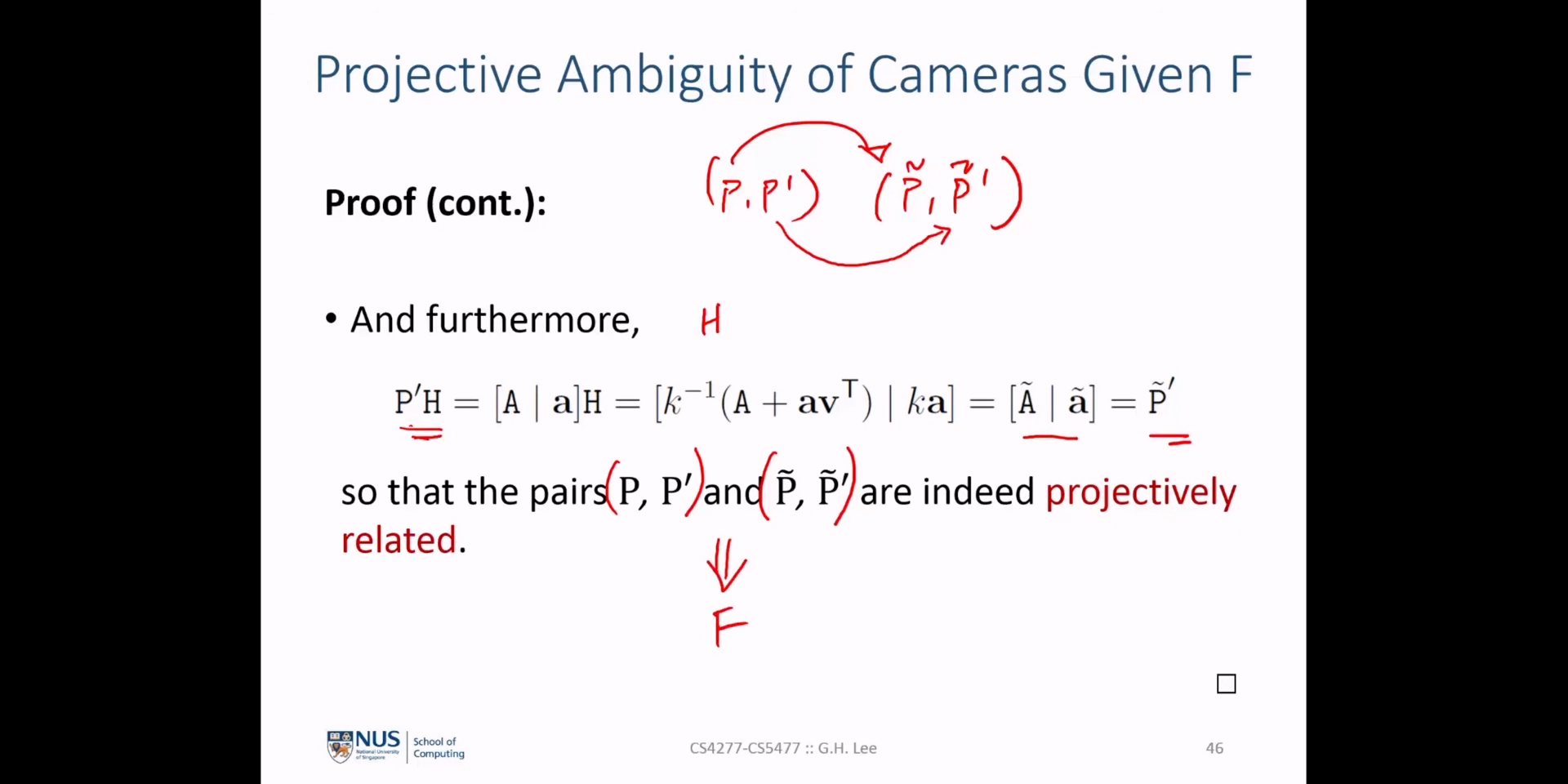
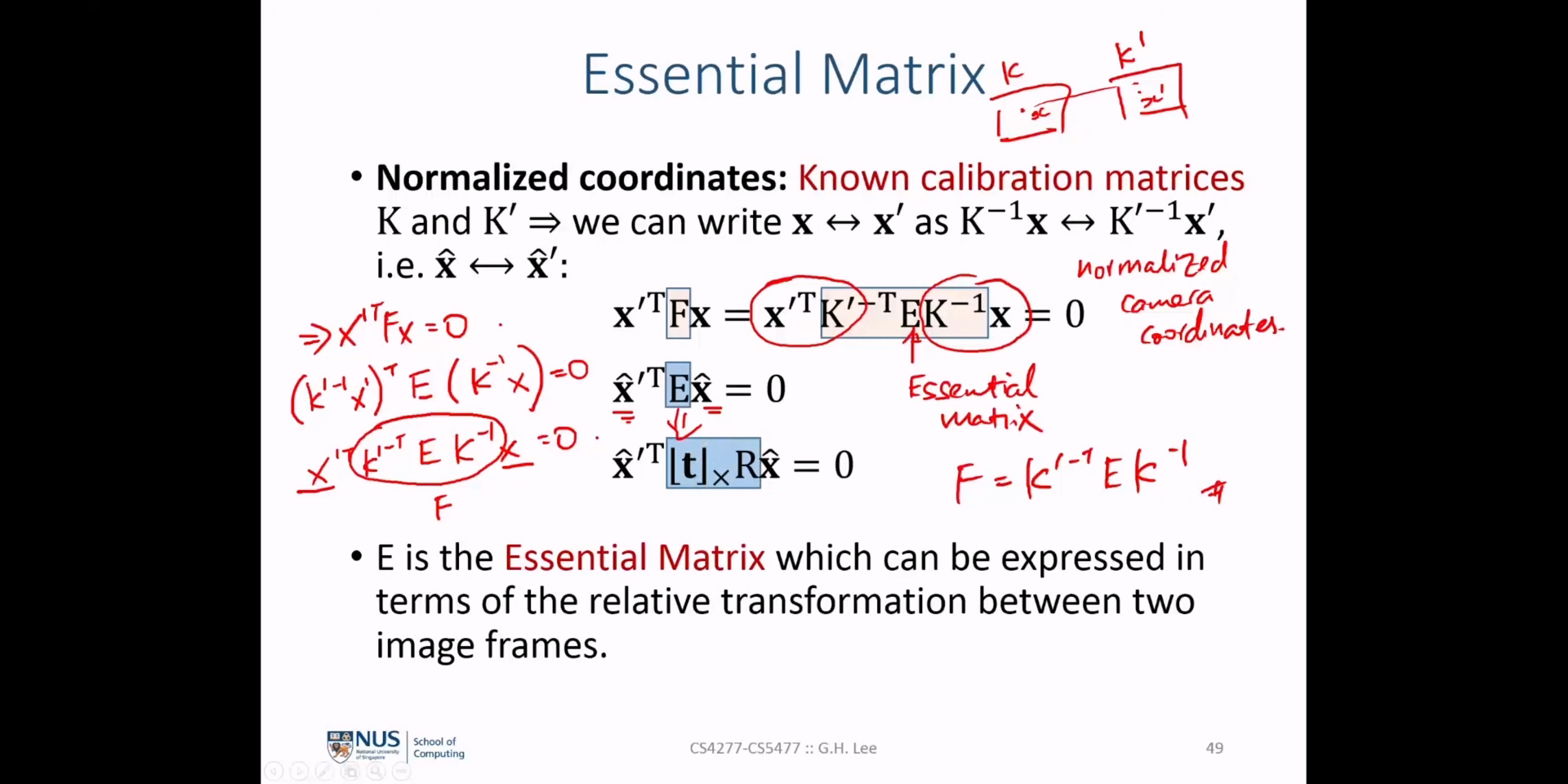
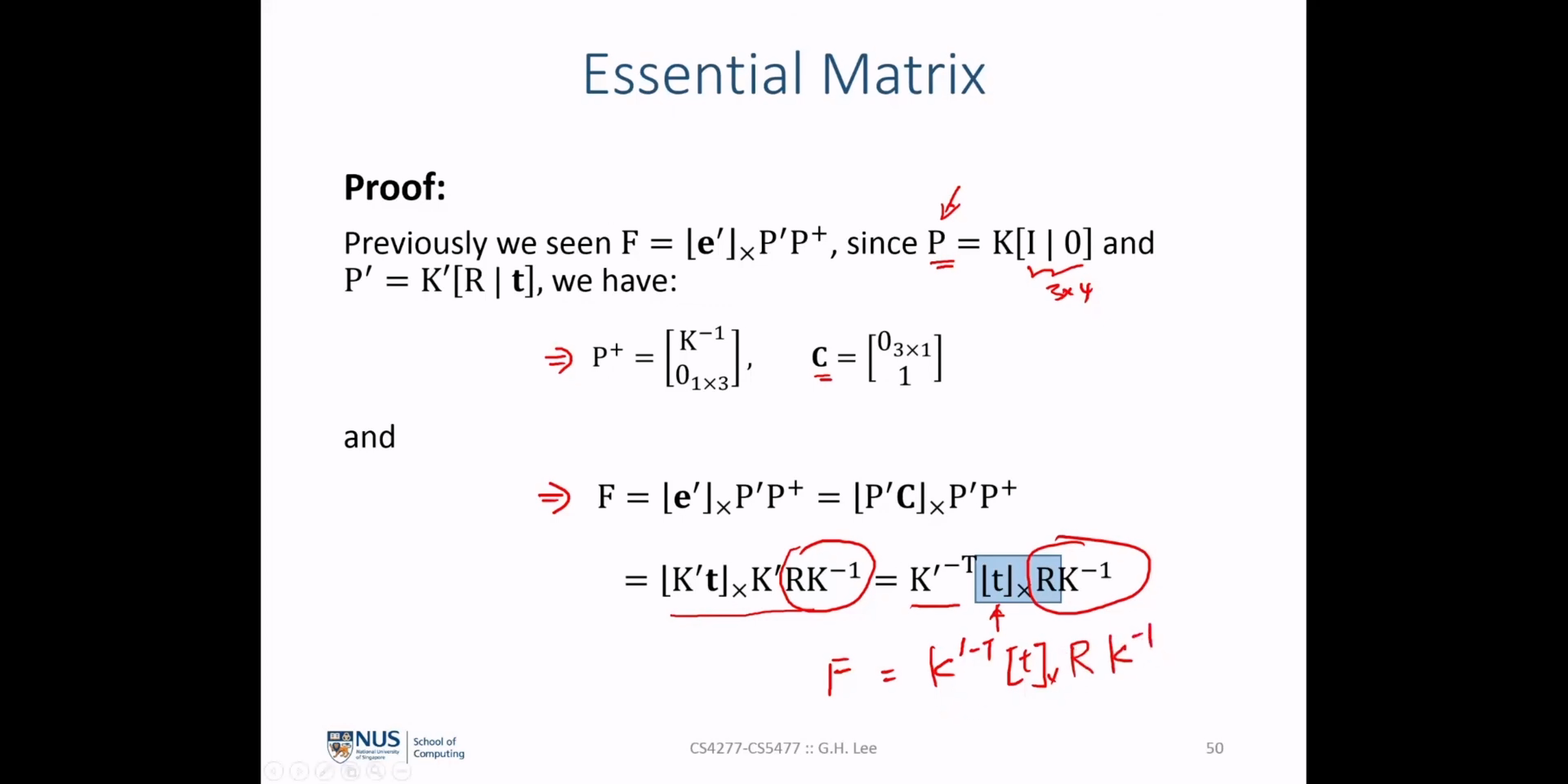
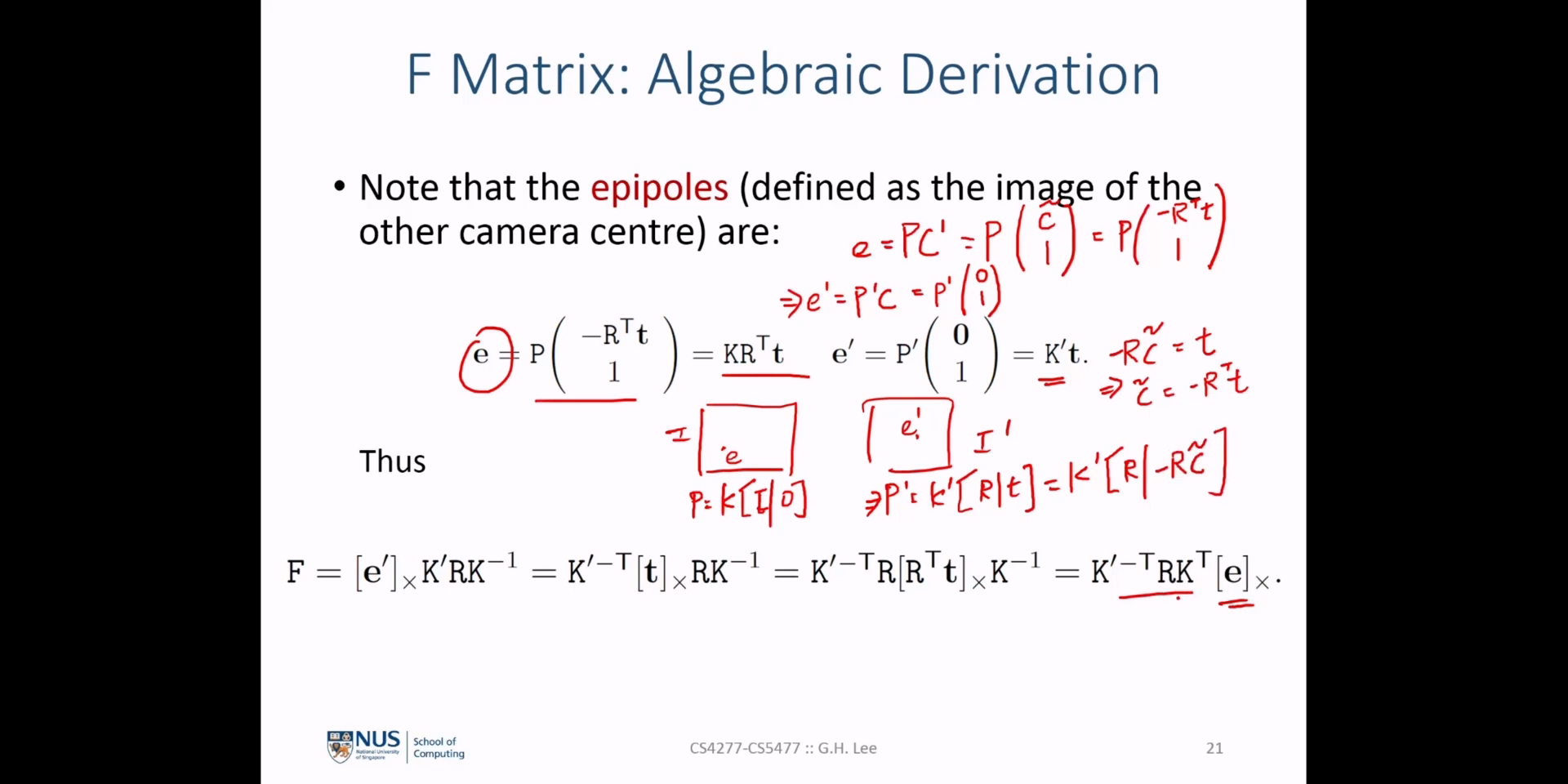
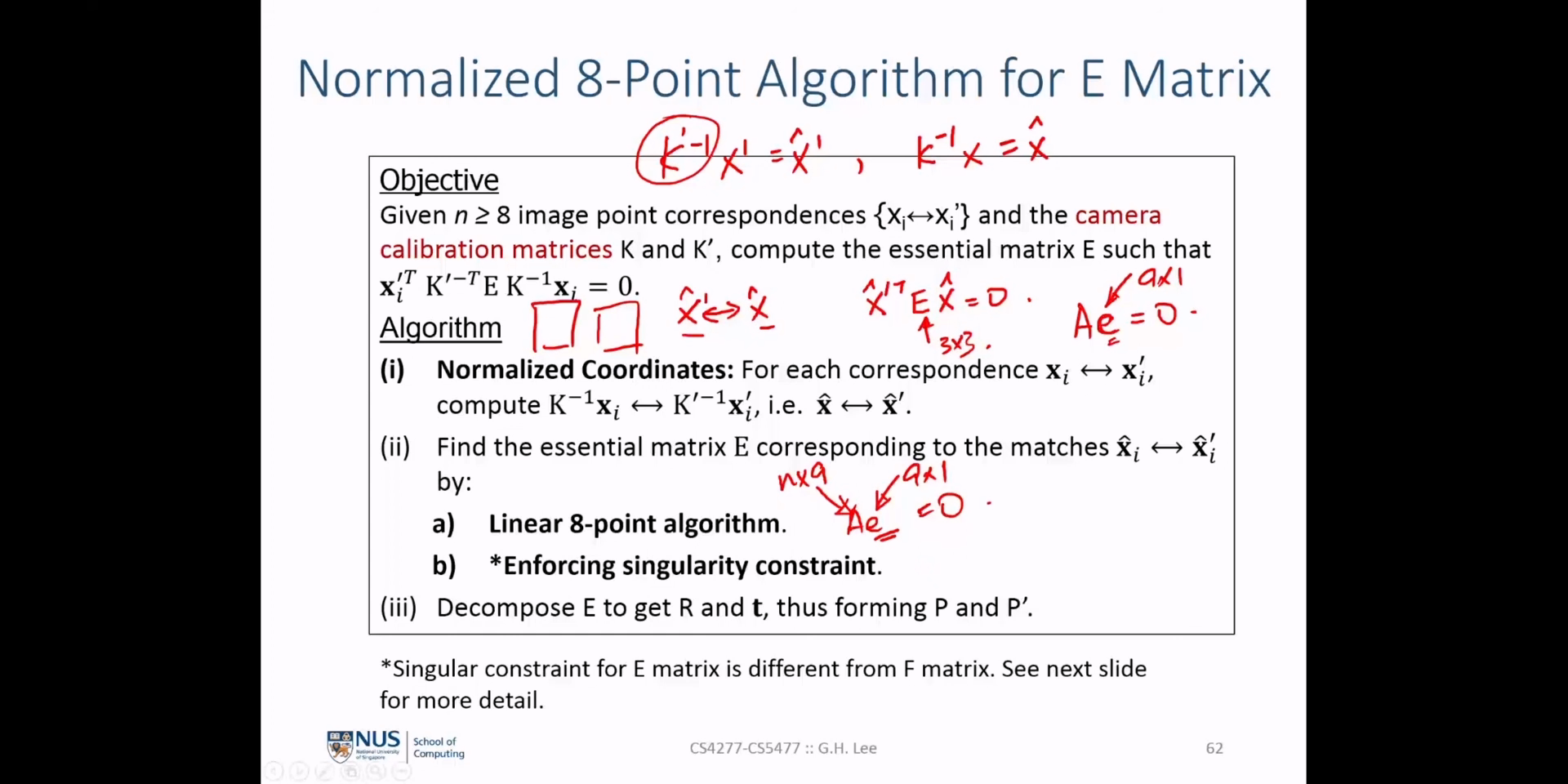
- 앞의 21p 슬라이드를 살펴보면 \(F = [e']_{\times}P'P^{+} = K'^{-T} [t]_{\times} R K^{-1}\) 을 전개하는 방법에 대하여 다루었습니다. 따라서 49p의 슬라이드에 해당하는 내용을 다음과 같이 전개할 수 있습니다.
- \[F = K'^{-T} E K^{-1} = K'^{-T} [t]_{\times} R K^{-1}\]
- \[E = [t]_{\times} R\]
- 앞에서 살펴본 바와 같이
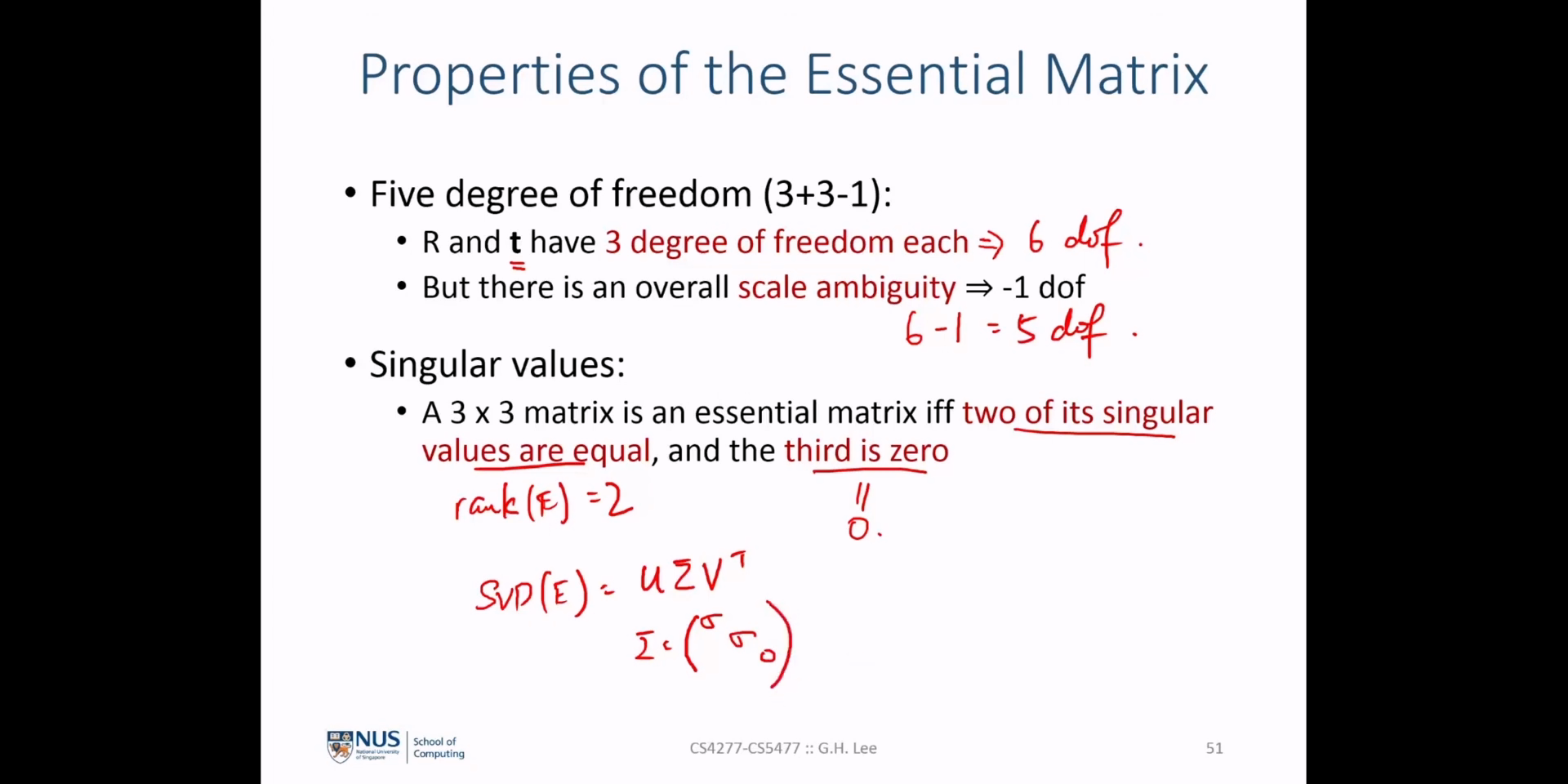
Essential Matrix를 결정하기 위해서는 \(R\) 과 \(t\) 만 결정되면 됩니다. \(R\) 의 경우scale이 없으며 각 축의 방향으로의 회전량이 정해지면 되기 때문에 3개의 자유도를 가집니다. - 반면 \(t\) 의 경우 움직임에 해당하는
Translation이므로scale과 연관되어 있습니다. 하지만scale이 정해질 수 없는scale ambiguity상황에서는 자유도가 1개 빠지게 되어 2개의 자유도만을 가질 수 있습니다. \(t\) 의 경우 \(s \cdot \hat^{t}\) 으로 표현할 수 있습니다. 여기서 \(s\) 는scale로 임의의 상수로 가정한 것이고 \(\hat{t}\) 는normalized vector를 의미합니다. 즉, 방향값만 가지고 있는 벡터라고 보면 됩니다. 식으로 나타내면 다음과 같습니다.
- \[\hat{t} = (\hat{t}_{x}, \hat{t}_{y}, \hat{t}_{z}) = \frac{(t_{x}, t_{y}, t_{z})}{\sqrt(t_{x}^{2} + t_{y}^{2} + t_{z}^{2})}\]
이 때, normalized vector는 \(\hat{t}_{x}^{2} + \hat{t}_{y}^{2} + \hat{t}_{z}^{2} = 1\) 의 조건을 만족해야 하므로 \((\hat{t}_{x}, \hat{t}_{y}, \hat{t}_{z})\) 중 2개만 만족하면 나머지 하나는 결정됩니다. 따라서 \(s \cdot \hat^{t}\) 에서 결정되어야 하는 것은 2개이므로 \(t\) 를 구할 때 DoF는 2개가 됩니다.
- 따라서 \(R\) 을 구할 때
3 DoF와 \(t\) 를 구할 때2 DoF로Essential Matrix는5 DoF를 가집니다.
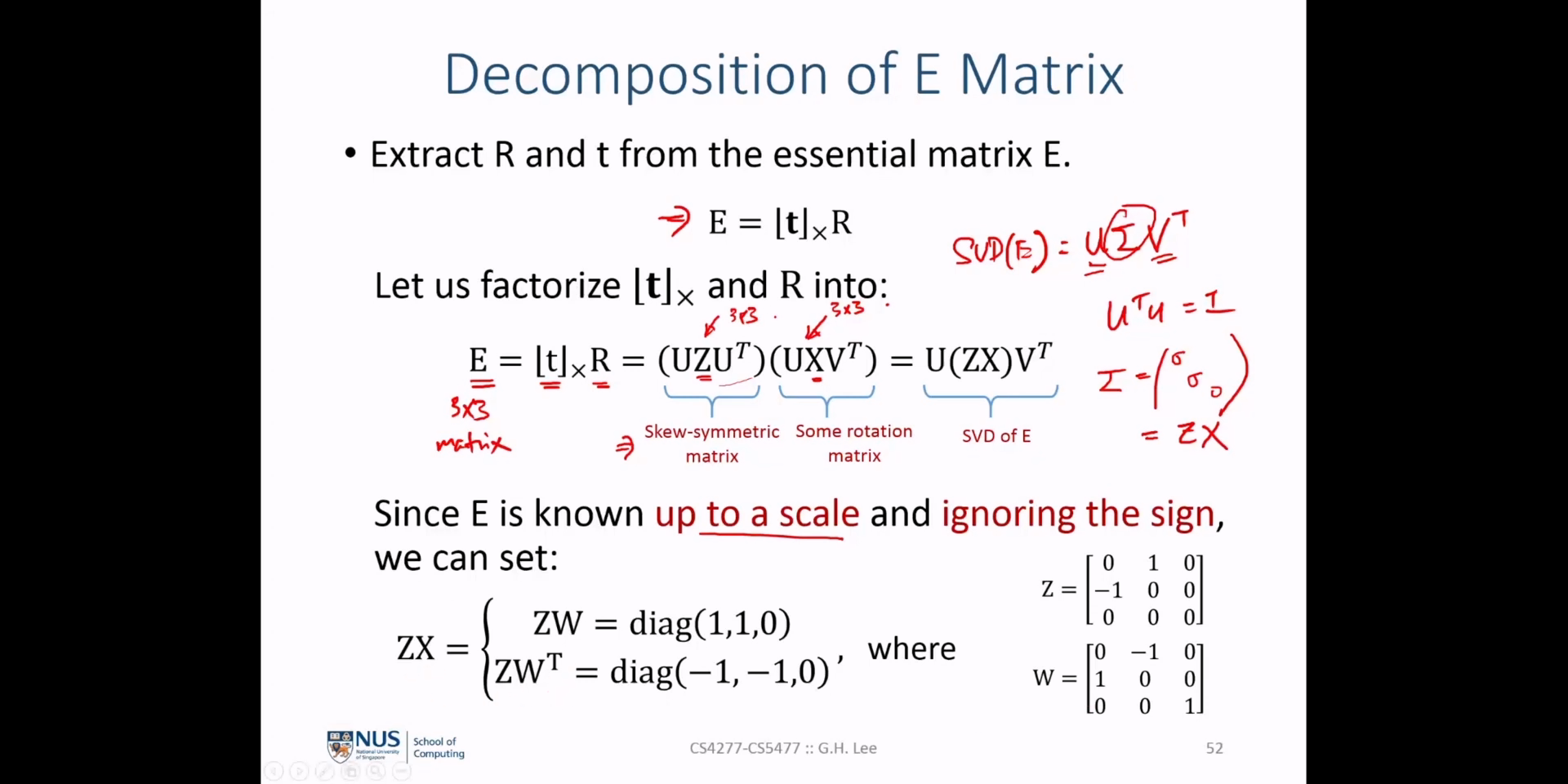
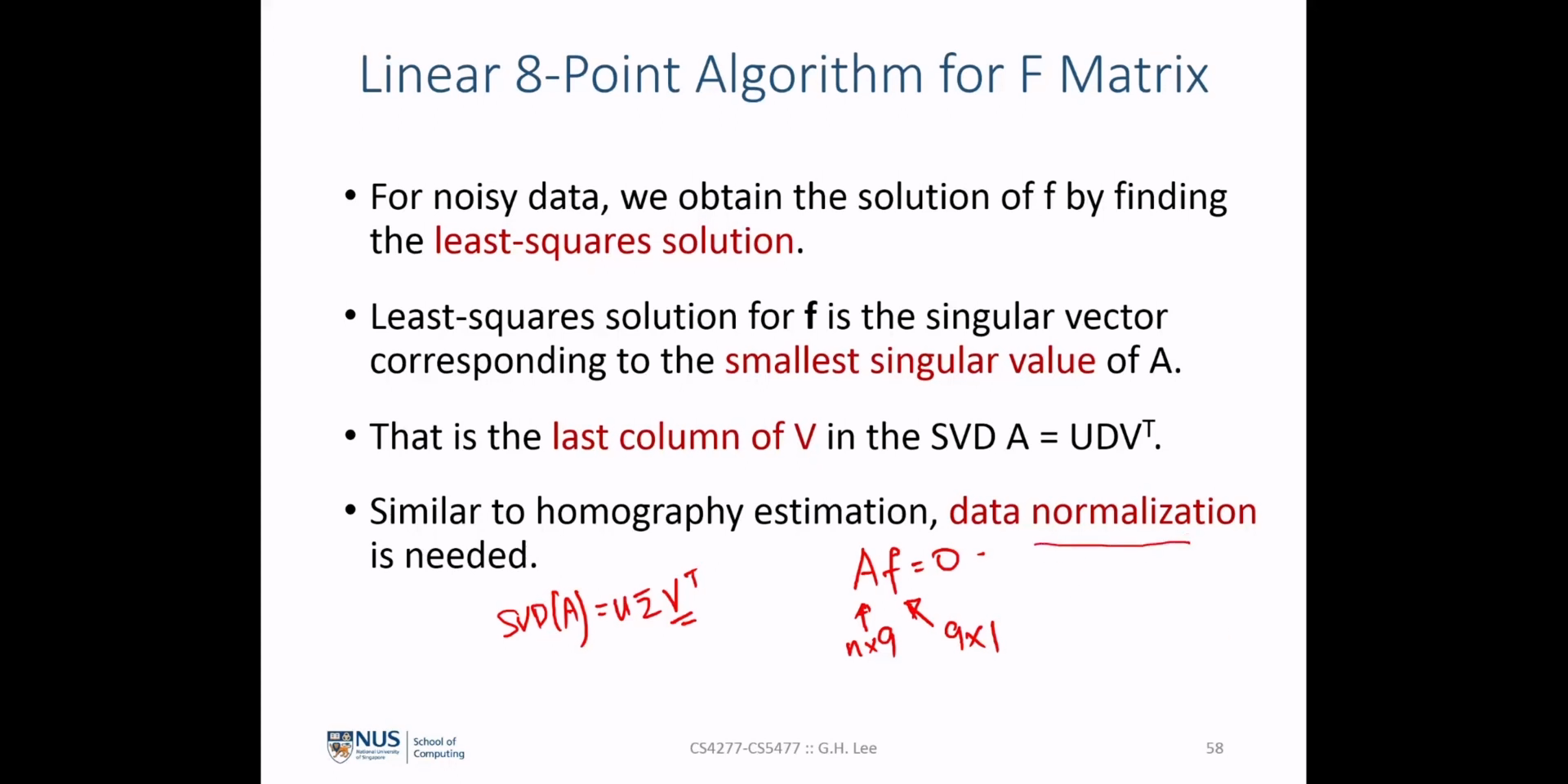
- 위 식에서 \(E = [t]_{\times} R\) 의 각 성분을
SVD를 적용하면 다음과 같습니다.
- \[[t]_{\times} = U Z U^{T}\]
- \[R = UXV^{T}\]
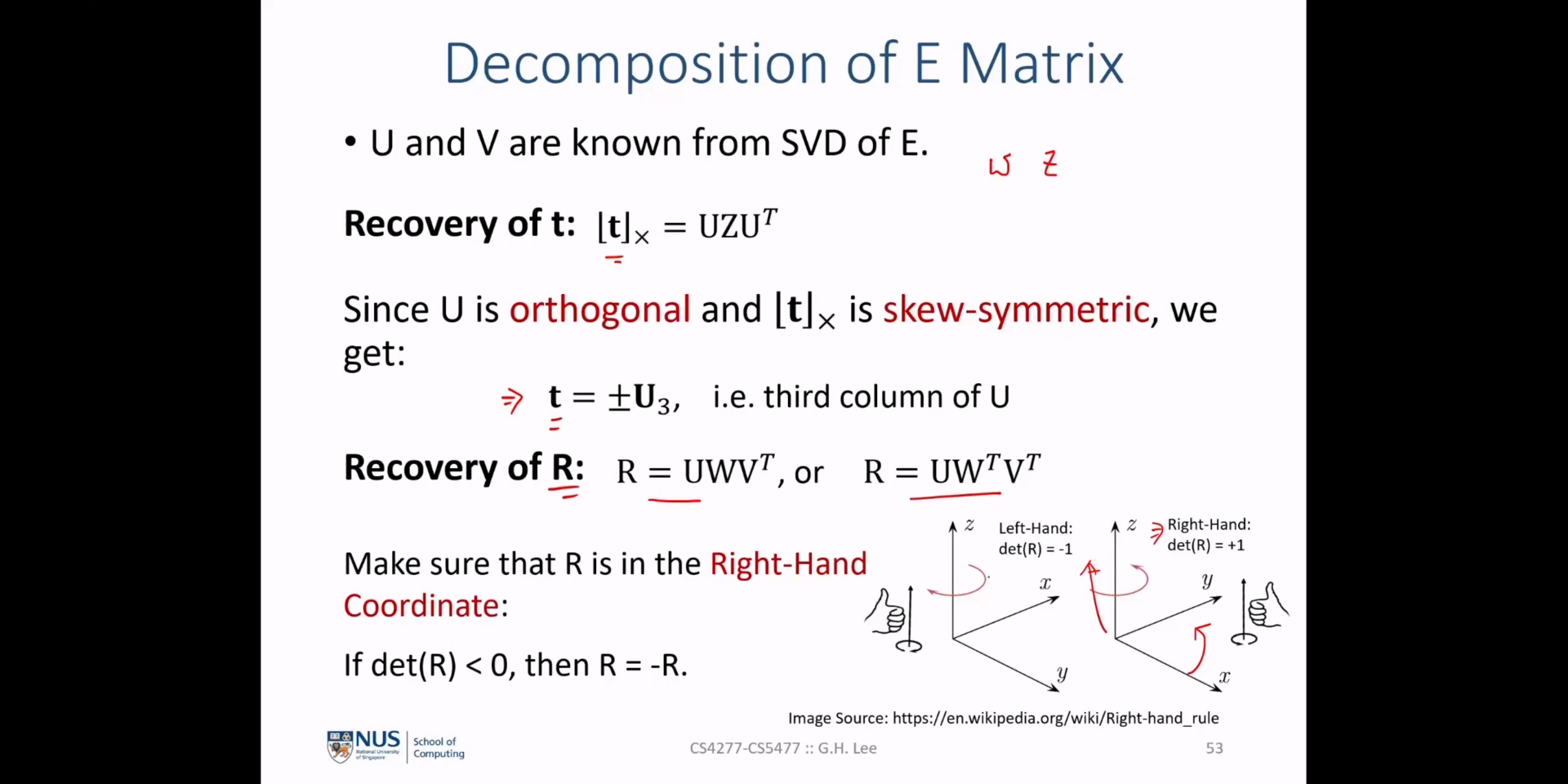
Skew-symmetric matrix인 \([t]_{\times}\) 인 경우 다음과 같은 이유로SVD시 같은orthogonal matrix( \(U\) ) 로 분해 됩니다.
- \[A = U \Lambda V^{T}\]
- \[A^{T}A = V \Lambda U^{T}U \Lambda V^{T} = V \Lambda^{2} V^{T}\]
- 따라서
Skew-symmetric matrix를SVD하였을 때, \(U, V\) 는 같은 값으로 분해됩니다.
- 반면 \(R\) 을
SVD하였을 때, \([t]_{\times}\) 에서 분해된 \(U\) 가 \(R\) 에도 사용되었습니다. 이와 같이 \(U\) 가 같이 사용됨으로 인하여 \(E = [t]_{\times} R\) 로 묶일 수 있도록 수식이 전개됩니다. - 기하적으로는 동일한 \(U\) 를 사용하면
Translation및Rotation이 동일한 좌표계에 표시됩니다.SVD의 \(U\Lambda V^{T}\) 에서 \(U, V\) 는basis의 회전으로 나타내고 \(\Lambda\) 는basis의 스케일 변화를 나타냅니다. (참조 : SVD 의미 해석) - 따라서 최종 \(R\) 을 적용하였을 때,
basis가 \(U\) 에 의해 회전되고 \(t\) 또한basis가 \(U\) 에 의해 회전되도록 구성되어야 기하학적으로 일관성이 있기 때문에 \([t]_{\times} R\) 값이 의미를 가지게 됩니다.

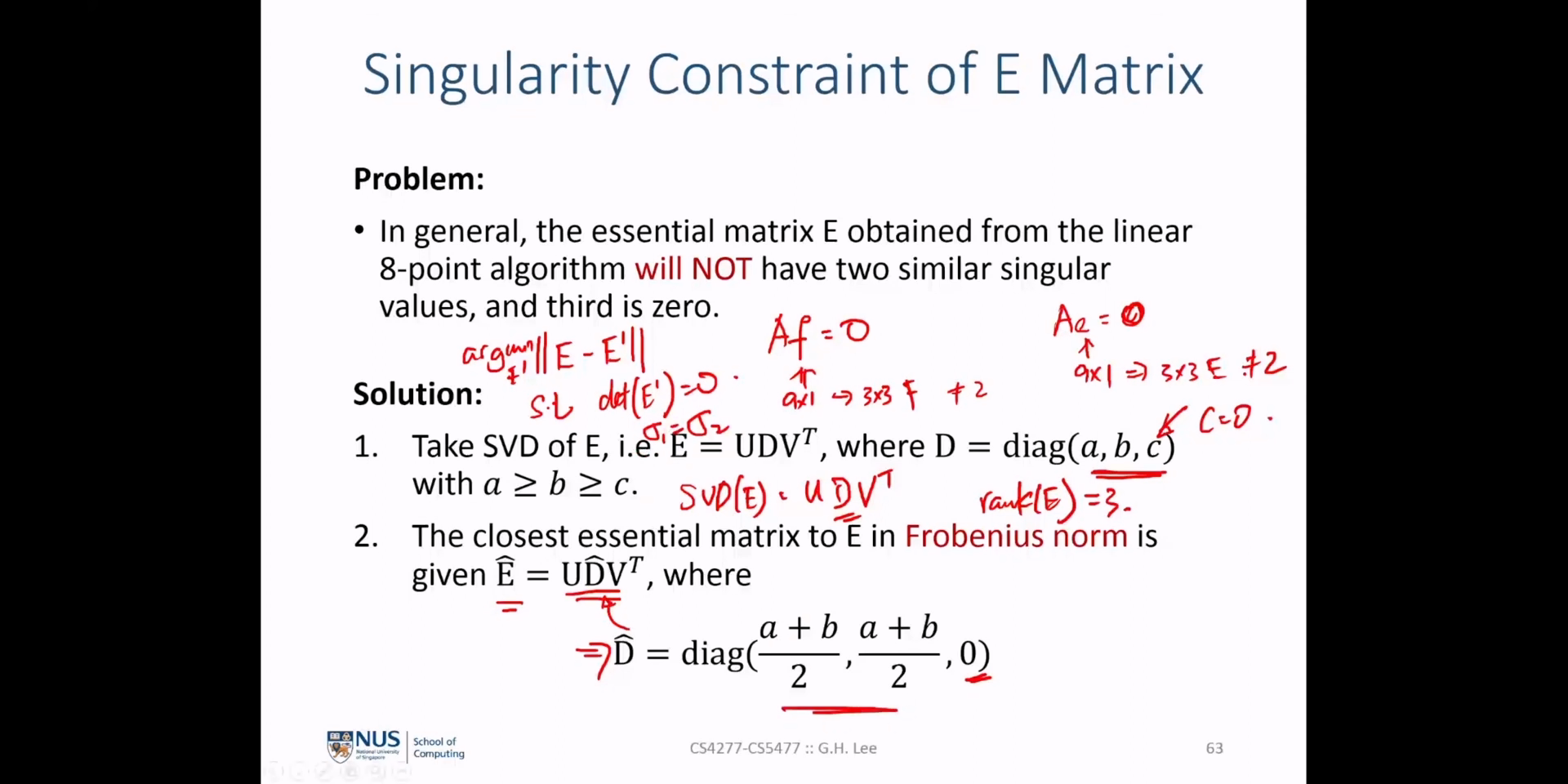
- 위 슬라이드에서 설명하는
Frobenius norm은 행렬의 크기 및 사이즈 등을 측정하는 척도이며 벡터의 크기를 측정하는 방법과 유사합니다. 대표적으로 사용하는Frobenius norm의 수학적인 정의는 다음과 같습니다.
- \[\Vert A \Vert_{F} = \sqrt{\sum_{i}\sum_{j} \vert a_{ij} \vert^{2} }\]
- 위 식은 행렬 \(A\) 에 대하여
square root of sum of absolute squares를 나타냅니다. - 이와 같은 방법으로 크기를 정하는 것은 벡터의
Euclidean (L2) norm을 구하는 방식과 같으며 단지 행렬에 적용한 것으로 보면 됩니다. - 반면에
Singular Value를 이용하는 방법도 존재합니다.singular value가 \(\sigma_{1}, \sigma_{2}, ... , \sigma_{n}\) 일 때,Frobenius norm은 다음과 같습니다.
- \[\Vert A \Vert_{F} = \sqrt{\sigma_{1}^{2} + \sigma_{2}^{2} + ... + \sigma_{n}^{2}}\]
- 이와 같이
Frobenius norm을 계산하는 방법은 여러가지가 있고 다음과 같은 조건을 만족하면Frobenius norm이라고 합니다. - ①
Frobenius norm은 항상 0 또는 양수이어야 합니다. (non-negative) - ②
Frobenius norm이 0이면 행렬은 항상 영행렬 이어야 하며 그 역도 성립합니다. - ③
triangle inequality가 성립합니다. \(\Vert A + B \Vert_{F} \le \Vert A \Vert_{F} + \Vert B \Vert_{F}\) - ④
orthogonal transformation에 대하여 불변해야 합니다. \(\Vert Q A U \Vert_{F} = \Vert A \Vert_{F} \quad (Q, U \text{ are orthogonal matrices.})\)
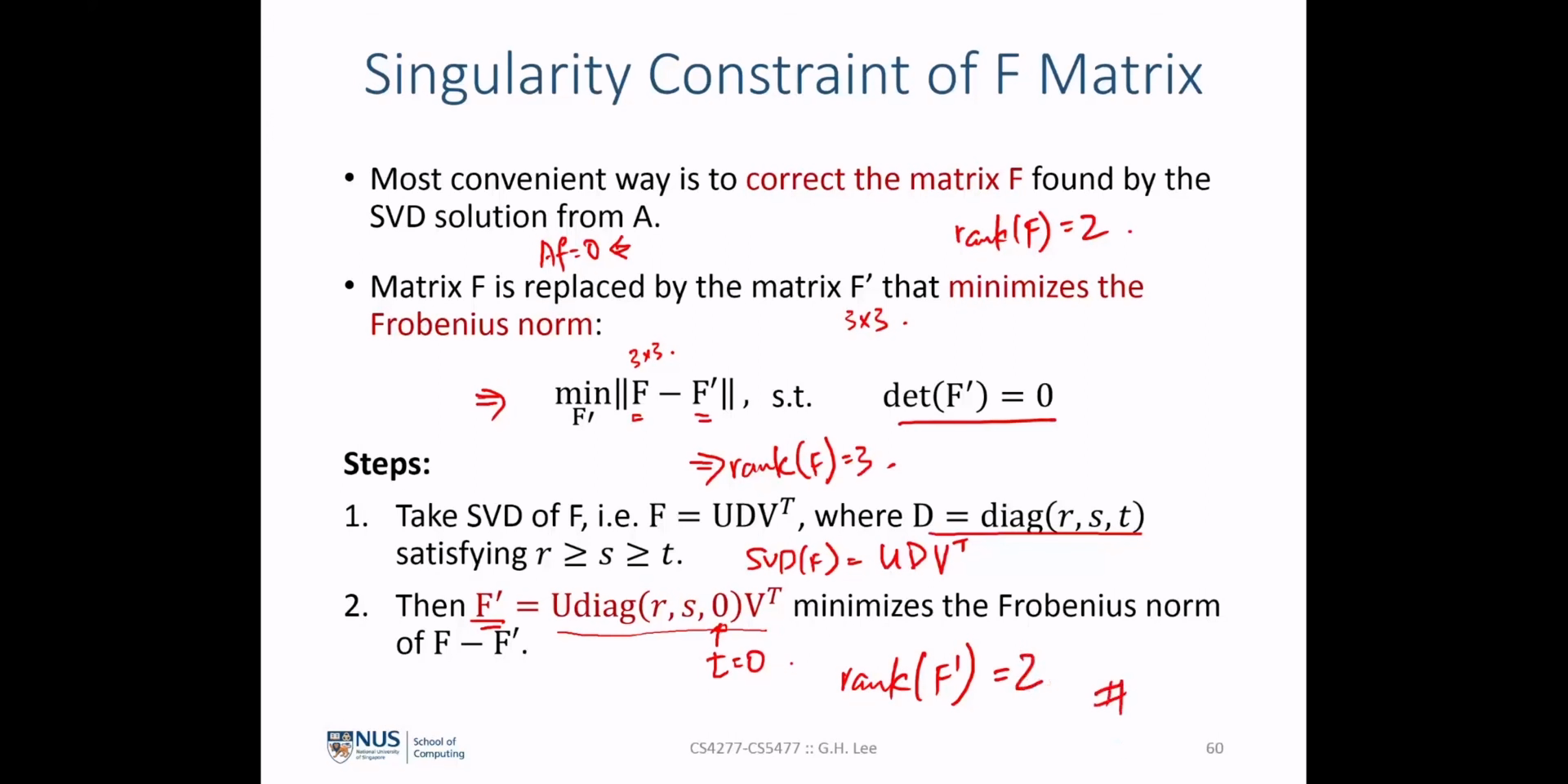
- 본 슬라이드에서는
Frobenius norm이 가장 가까운 행렬을 찾는 방법을 이용하여Fundamental Matrix를 구하는 방법을 사용합니다.
- 참조 : https://www.cs.cmu.edu/~16385/s17/Slides/11.4_Triangulation.pdf