(멀티플 뷰 지오메트리) Lecture 1. 2D and 1D projective geometry
2022, Apr 20
- 참조 : https://youtu.be/LAHQ_qIzNGU?list=PLxg0CGqViygP47ERvqHw_v7FVnUovJeaz
- 참조 : https://youtu.be/gQ7IUS8NKCI?list=PLxg0CGqViygP47ERvqHw_v7FVnUovJeaz
- 참조 : Multiple View Geometry in Computer Vision
- 참조 : https://www.cuemath.com/learn/mathematics/conics-in-real-life/
- 이번 글에서는 2D and 1D projective geometry 내용의 강의를 듣고 정리해 보도록 하겠습니다.


















- 위 슬라이드에서
line에 직교한 벡터 \((a, b)\) 는 다음과 같은 방식으로 도출될 수 있습니다.
- \[\text{line: } (a, b, c) = ax + by + c = 0\]
- \[P = (x_{1}, y_{1}), Q = (x_{2}, y_{2}) \text{ P and Q are on the line.}\]
- \[\text{direction vector: } d = Q - P = (x_{2} - x_{1}, y_{2} - y_{1})^{T}\]
- \[\text{line equation 1: } ax_{1} + by_{1} + c = 0\]
- \[\text{line equation 2: } ax_{2} + by_{2} + c = 0\]
- \[\text{line equation 2 - line equation 1: } a(x_{2} - x_{1}) + b(y_{2} - y_{1}) = 0\]
- \[(a, b) \cdot (x_{2} - x_{1}, y_{2} - y_{1}) = (a, b) \cdot d = 0\]
- \[\therefore (a, b)^{T} \text{ is perpendicular to } d.\]


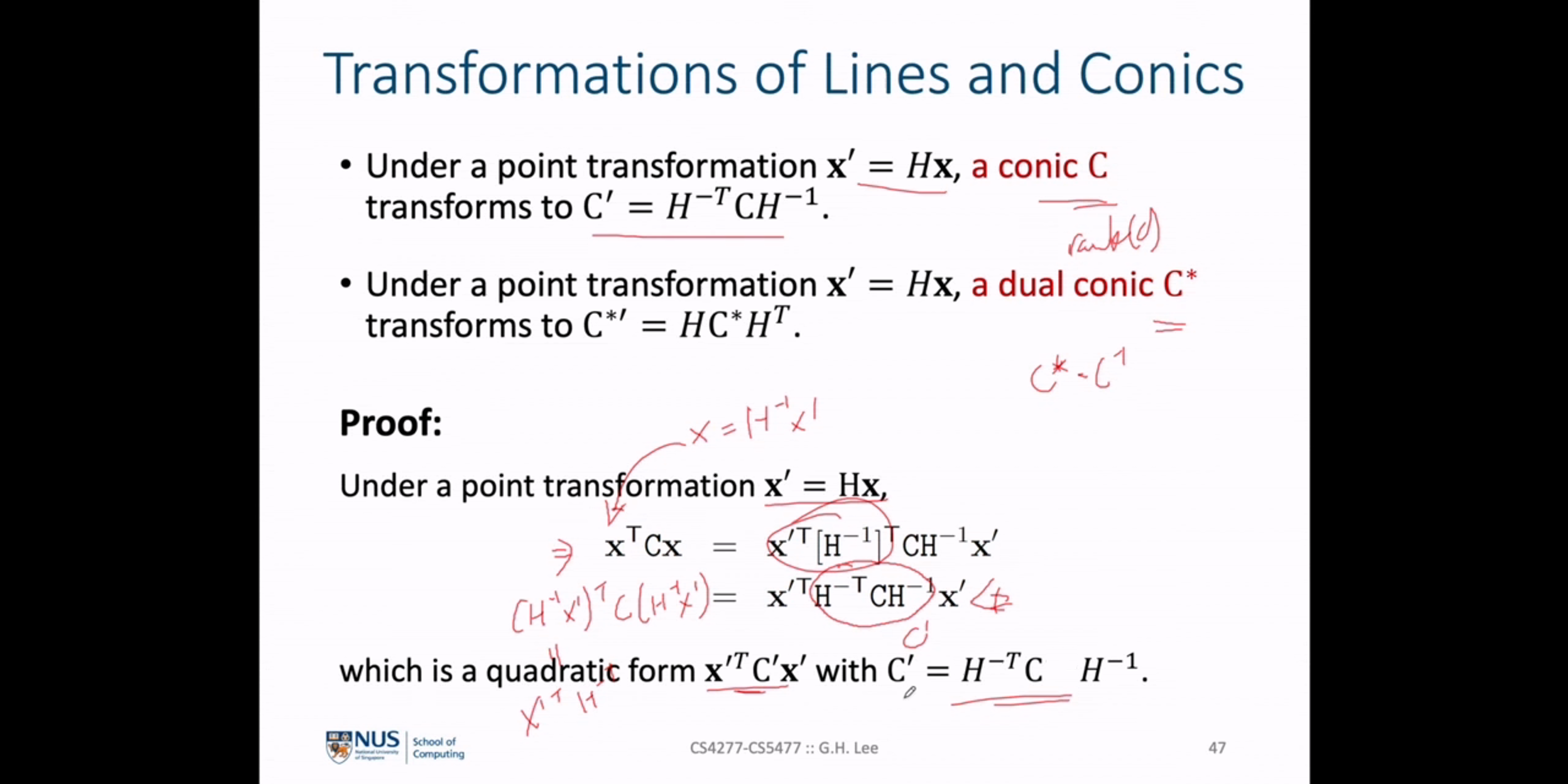
- 지금 부터는 2D and 1D projective geometry 강의의 후반부로 conics, dual conics와 관련된 내용과 transform 관련 내용에 대하여 다루어 보도록 하겠습니다.
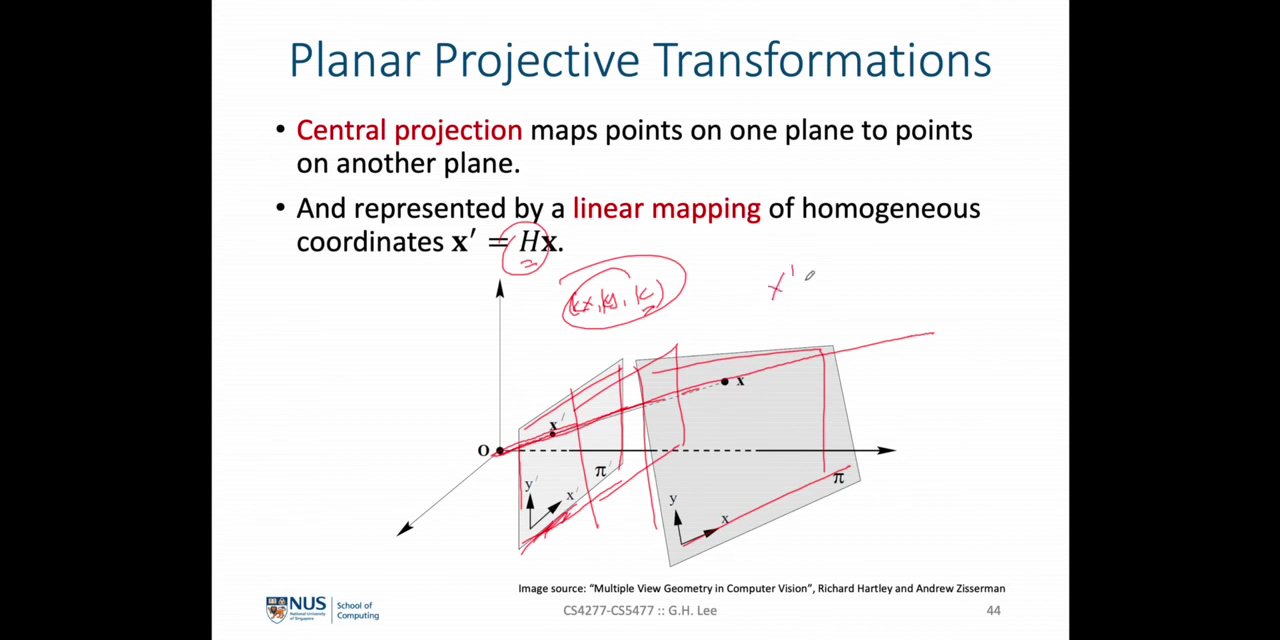
projective plane이란 3차원 공간에서 원점을 지나는 모든 직선들의 모임으로 해석할 수 있습니다. 이 관점에서projective plane의point는 원점을 지나는 각각의 직선 (line)이고line은 원점을 지나는 3차원 공간 속의 2차원 평면 (plane)으로 정의할 수 있습니다.projective plane은 일반적인 plane과 유사하지만,point at infinity라는무한대의 점이 존재하여 모든 두 직선이 항상 교차가 되는 특성이 있습니다. 모든point at infinity들이 지나는 직선을line at infinity라고 합니다.
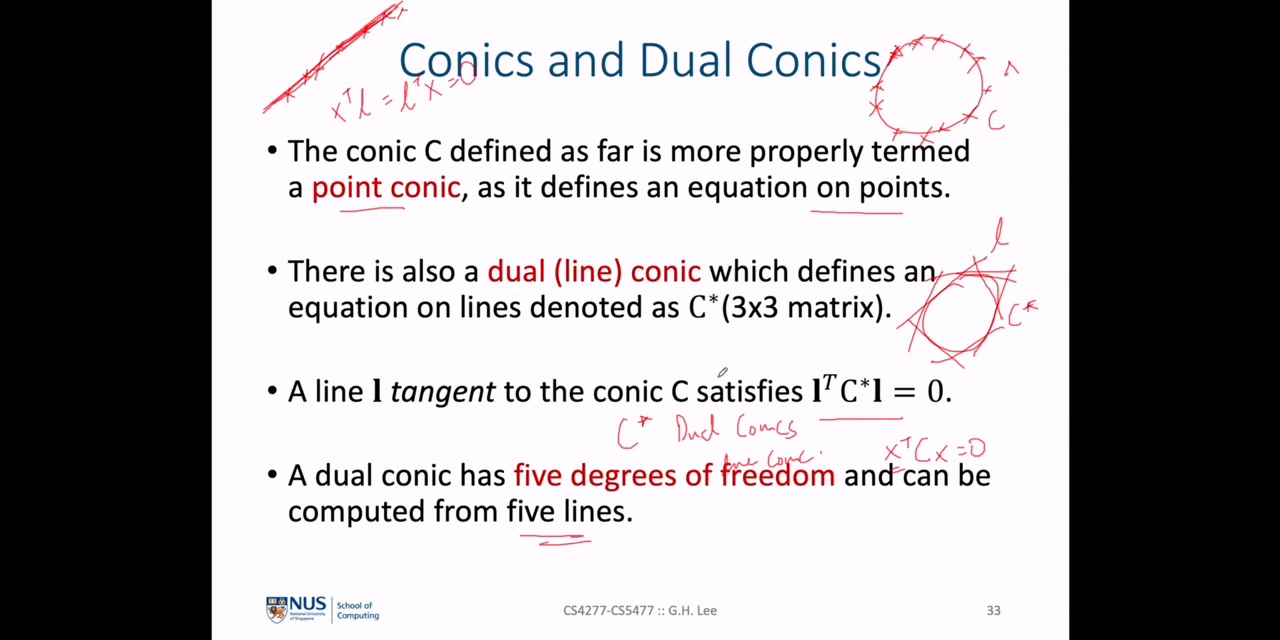
- 일반적인
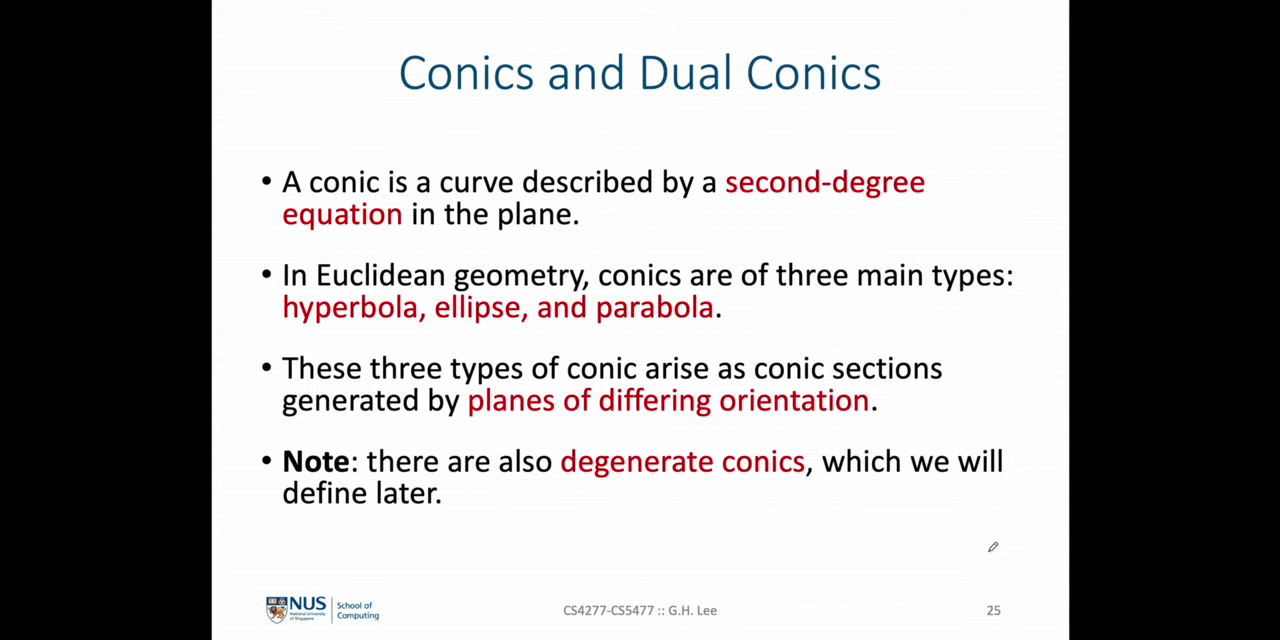
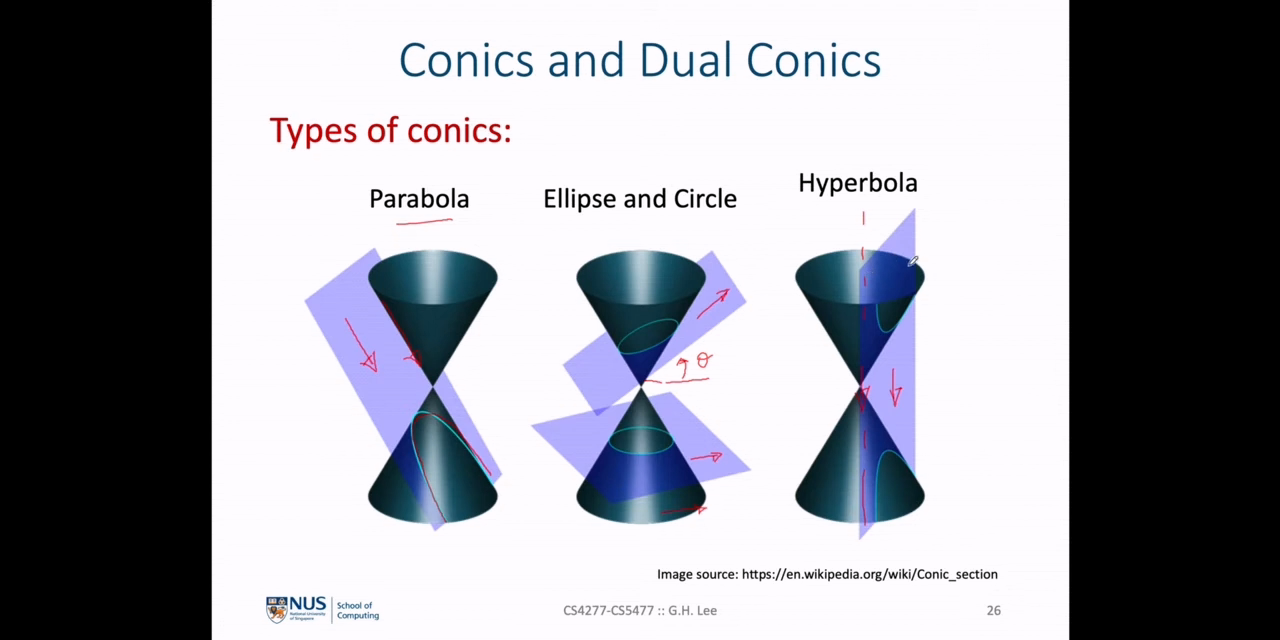
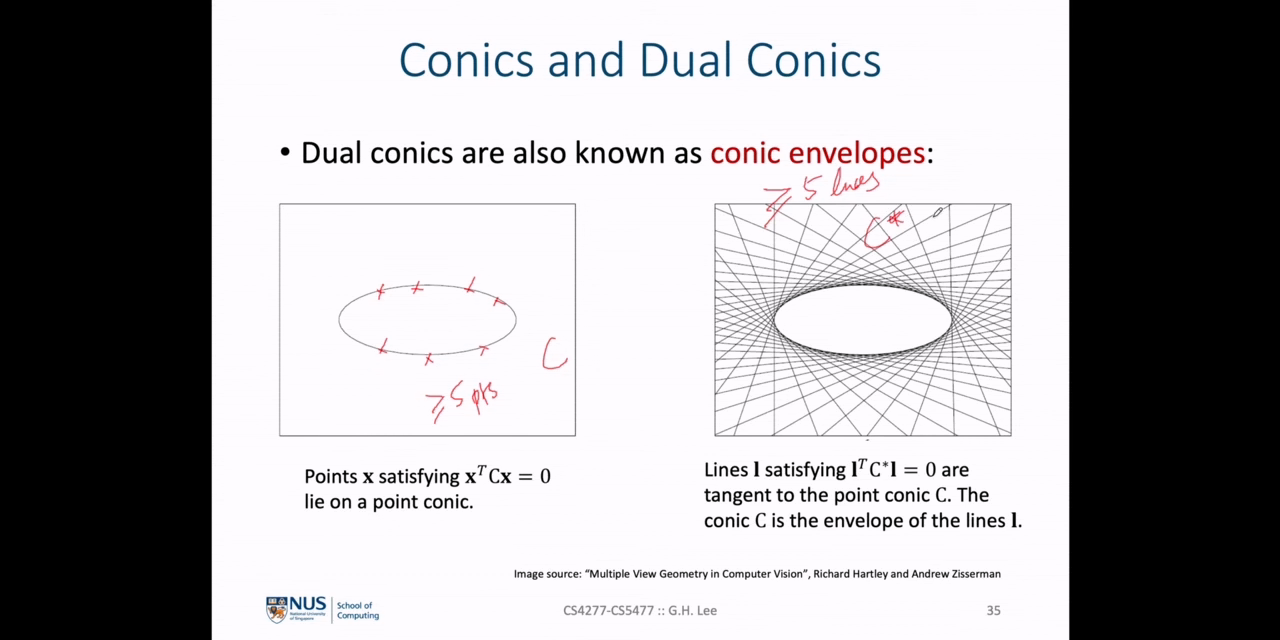
conic의 형태와 관련하여 아래 영상을 참조하시면 도움이 되실 것입니다.
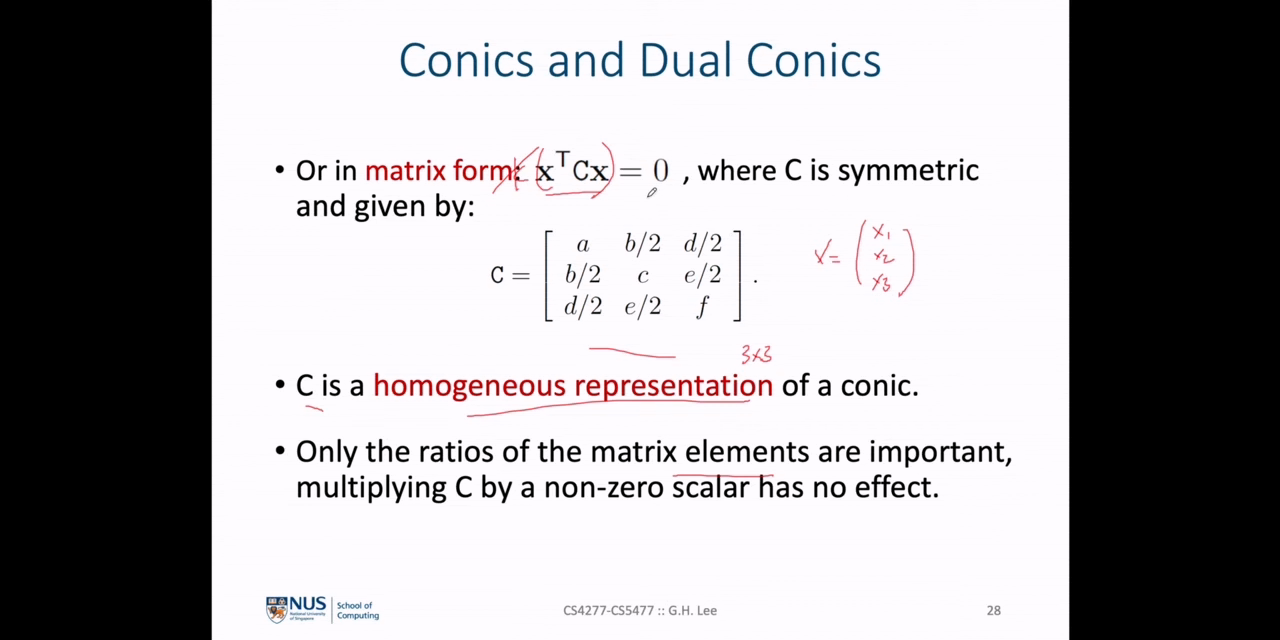
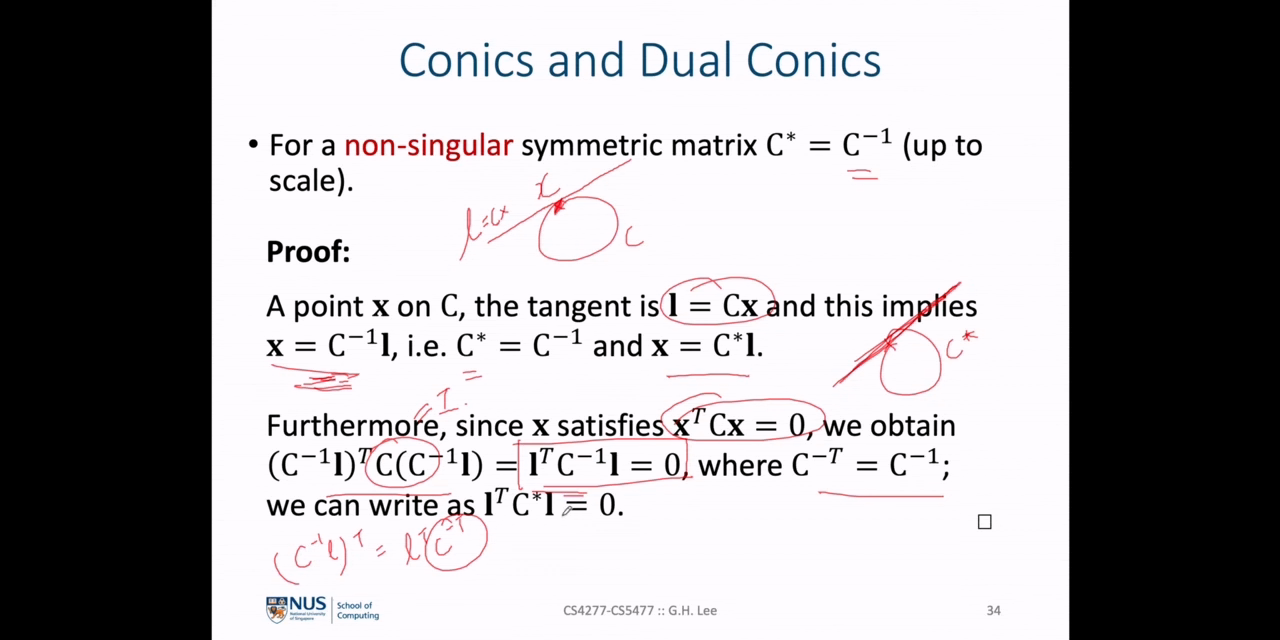
- 위 슬라이드의 \(C\) 는
대칭 행렬형태를 가지며 의미는 3개의 차원이 구성하는 관계를 수치로 나타낸 것을 의미합니다. - 예를 들어 (1, 1) 위치는 \(x_{1}, x_{1}\) 의 관계를 수치로 나타낸 것이고 (1, 2) 는 \(x_{1}, x_{2}\) 의 관계를 수치로 나타낸 것입니다. 따라서 \((i, j)\) 와 \((j, i)\) 의 관계는 같기 때문에
대칭 행렬형태를 가지게 됩니다.
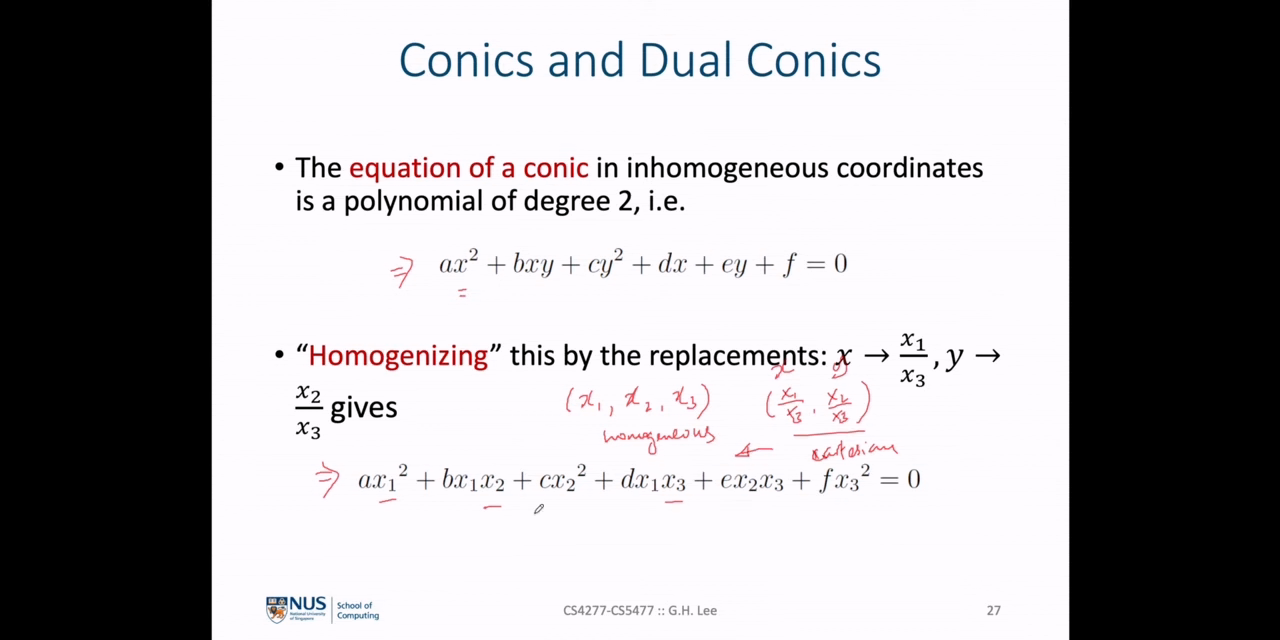
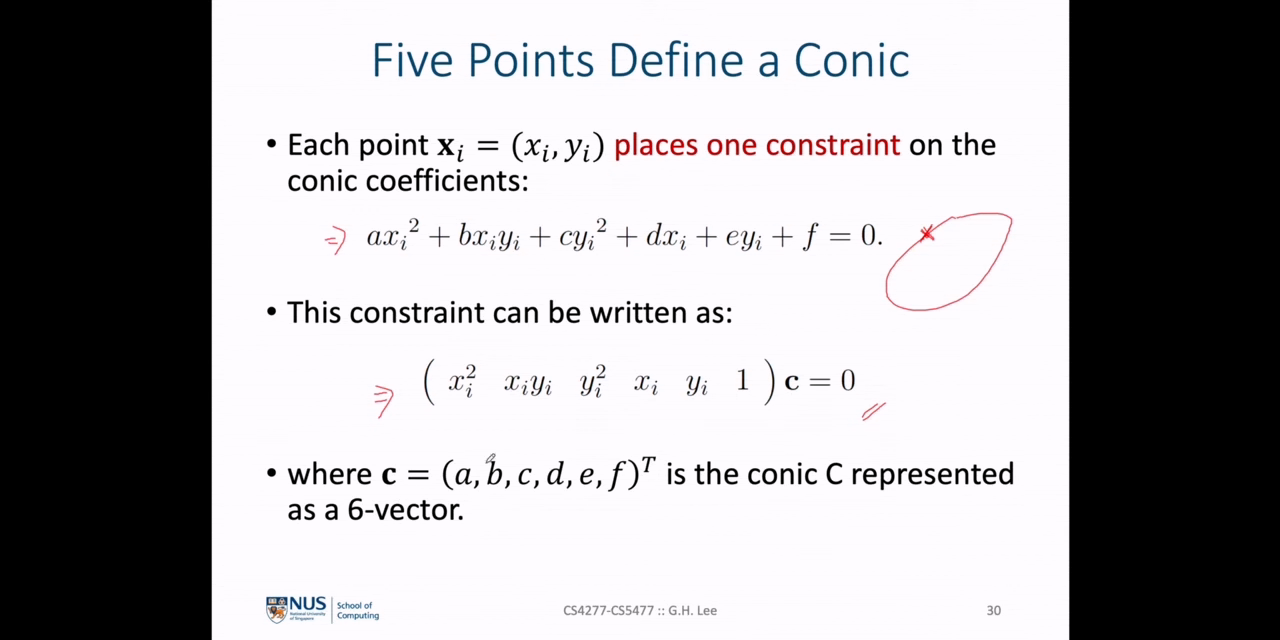
- \[a \cdot x_{1}^{2} + b \cdot x_{1}x_{2} + c \cdot x_{2}^{2} + d \cdot x_{1}x_{3} + e \cdot x_{2}x_{3} + f \cdot x_{3}^{2} = 0\]
- 위 슬라이드의 \(C\) 또한 3개의 차원이 구성하는 관계를 수치로 나타낸 것이며 위 식에서 \(X^{T} C X = 0\) 을 만족하도록 \(C\) 를 구성한 것입니다.
- 이와 같은 행렬 \(C\) 를
homogeneouse representation of conic이라고 합니다. homogeneouse representation of conic\(C\) 는 3개 차원의 경우의 수의 관계를 수치로 나타낸 것이므로 그 관계에 따라서 다양한 기하 형태가 나타납니다. 3개 차원의 경우의 수는 다음을 의미합니다. 아래 행렬에서 \(x_{d}\) 는 \(x\) 차원, \(y_{d}\) 는 \(y\) 차원, \(h_{d}\) 는 homogeneous 차원을 의미합니다. \(\text{rel}(a, b)\) 는 \(a, b\) 의 관계를 의미합니다.
- \[\begin{align} C &= \begin{bmatrix} \text{rel}(x_{d}, x_{d}) & \text{rel}(x_{d}, y_{d}) & \text{rel}(x_{d}, h_{d}) \\ \text{rel}(y_{d}, x_{d}) & \text{rel}(y_{d}, y_{d}) & \text{rel}(y_{d}, h_{d}) \\ \text{rel}(h_{d}, x_{d}) & \text{rel}(h_{d}, y_{d}) & \text{rel}(h_{d}, h_{d}) \end{bmatrix} \\ &= \begin{bmatrix} a & b/2 & d/2 \\ b/2 & c & e/2 \\ d/2 & e/2 & f \end{bmatrix} \end{align}\]
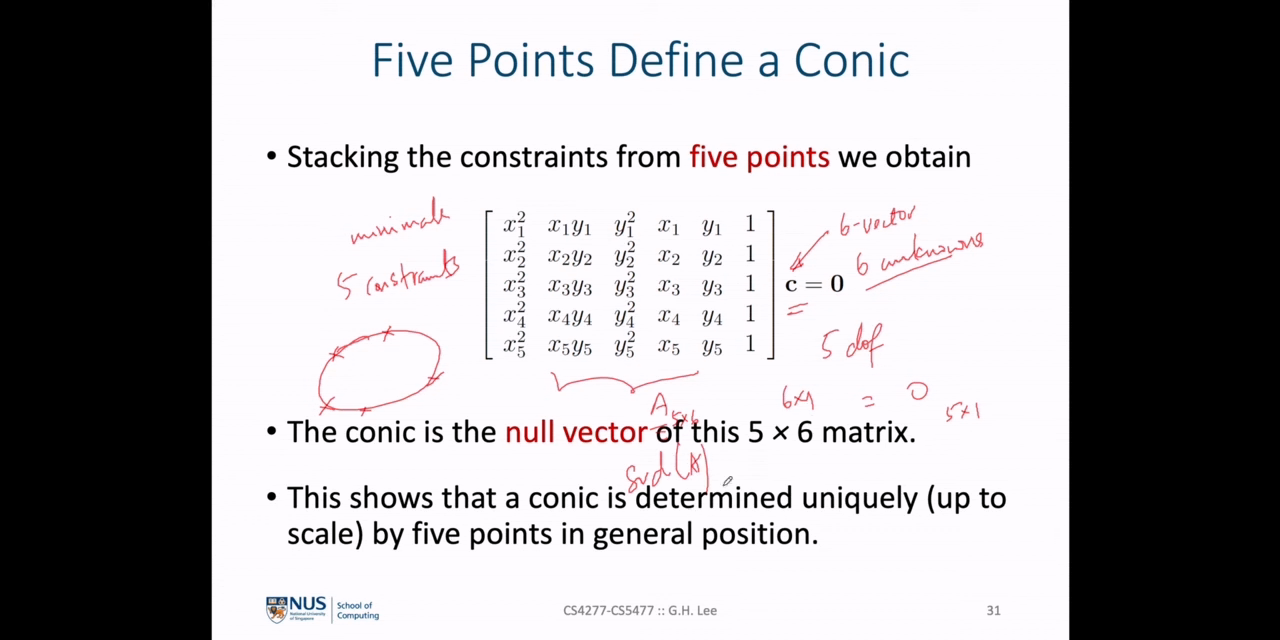
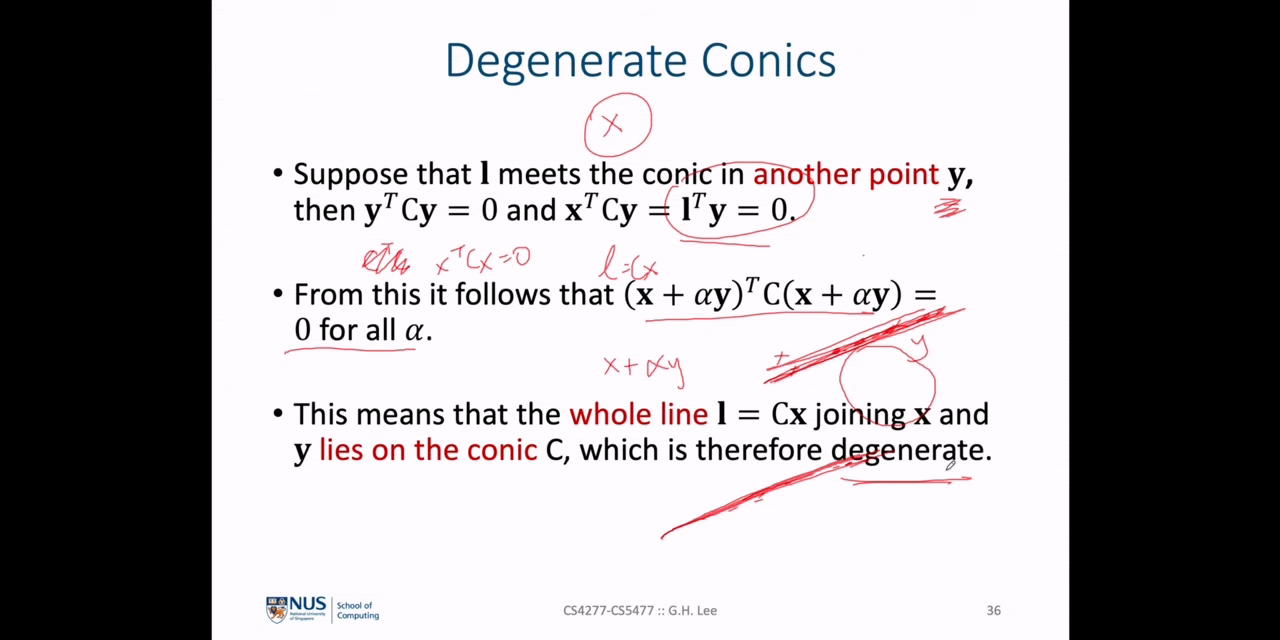
- 그 중 \(C\) 의 \(\text{rank}(C) = 3\) (
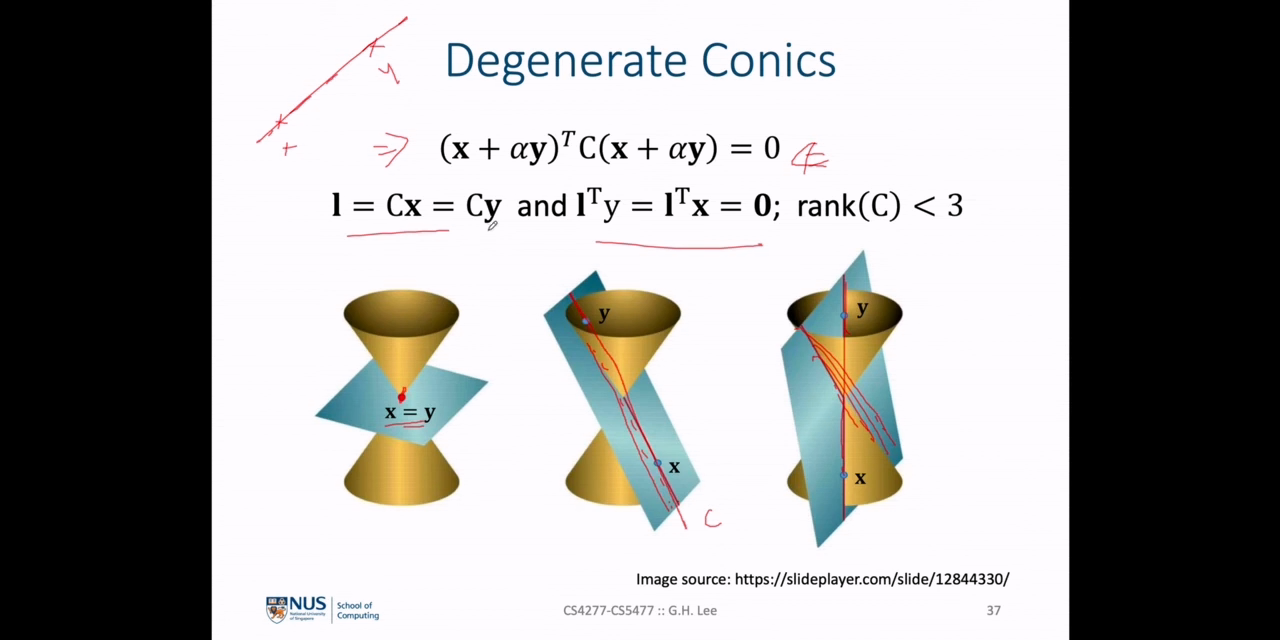
full rank) 인 경우원,타원,포물선,쌍곡선형태가 나타나는 반면 \(C\) 의 \(\text{rank}(C) \lt 3\) 인 경우교차선,평행선,단일선,점과 같은degenerate conic형태가 나타나기도 합니다. 이 부분은 차례대로 설명할 예정입니다.
- 따라서 지금부터 다룰
conic\(C\) 는 가장 작은 형태인point를 시작하여line,circle,ellipse,hyperbola,parabola등을 모두 포함하는 집합이기 때문에Multiple View Geometry에서 가장 중요하게 다루는 개념 중 하나입니다.
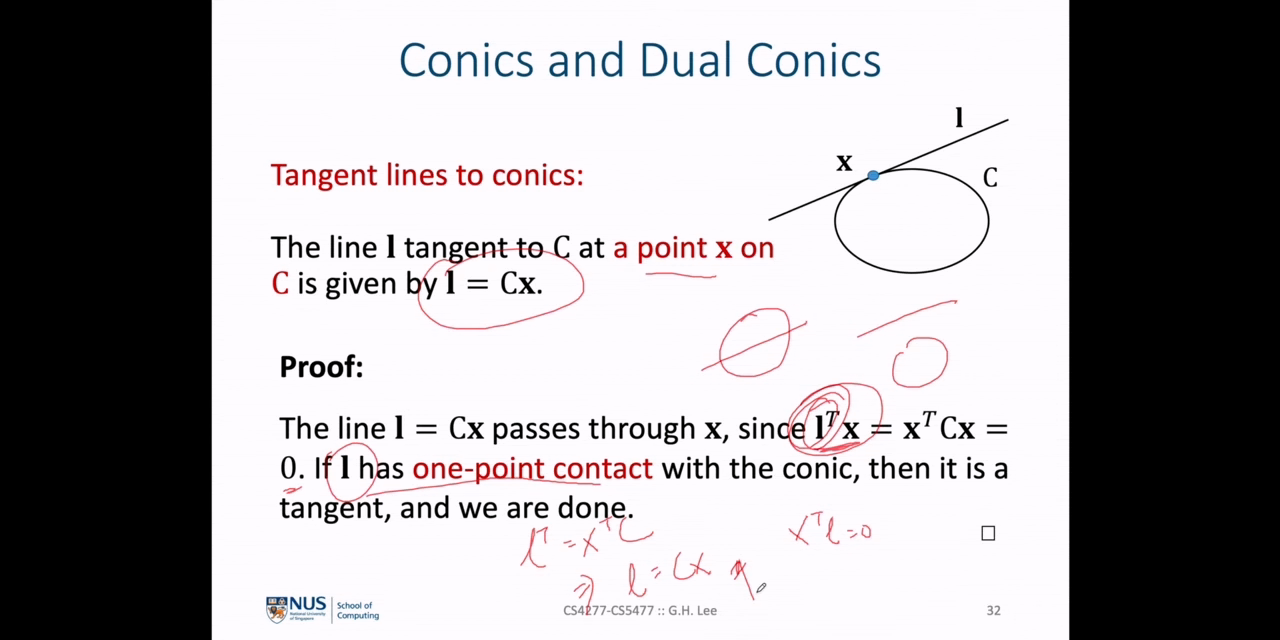
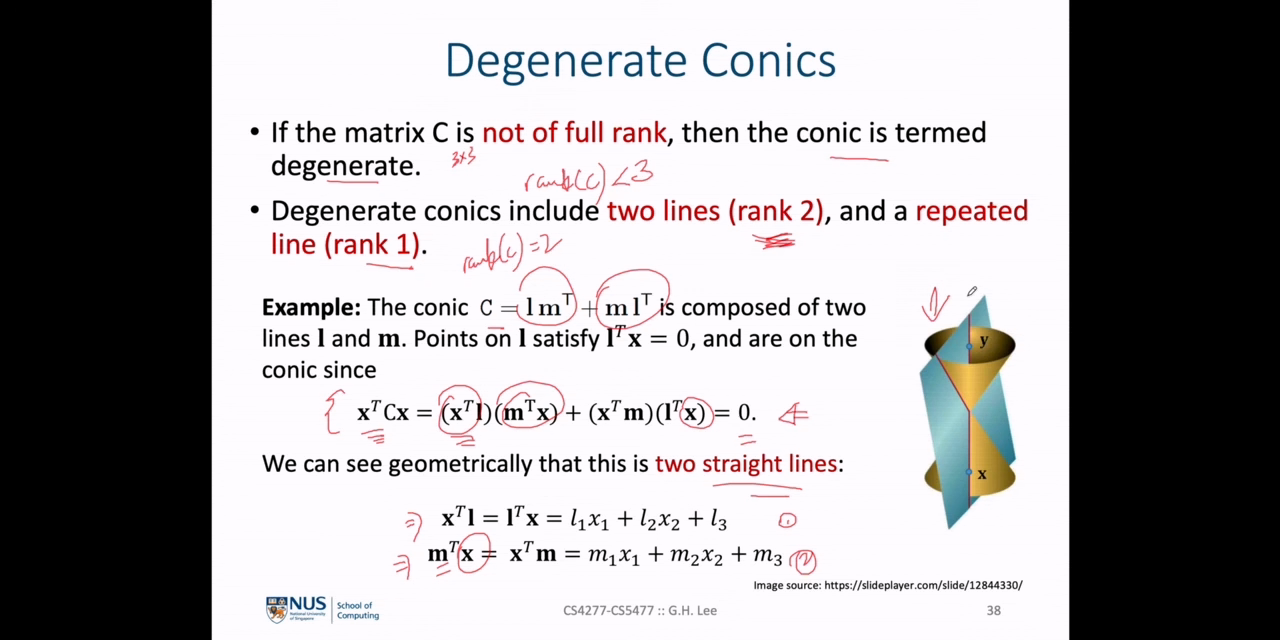
- 위 슬라이드에서 \(l\) 과 \(m\) 은
line을 나타내므로 각각 다음과 같습니다.
- \[l = \begin{bmatrix} l_{1} & l_{2} & l_{3} \end{bmatrix}^{T}\]
- \[m = \begin{bmatrix} m_{1} & m_{2} & m_{3} \end{bmatrix}^{T}\]
- 2개의 선 \(l, m\) 의 관계 또한 3개 차원의 경우의 수인 9개로 나타내기 위해
outer product를 한 것이고 대칭 행렬로 나타내고자 \(lm^{T} + ml^{T}\) 형태로 나타내어conic\(C\) 를 구성합니다. - 위 식의 \(C = lm^{T} + ml^{T}\) 에서 \(lm^{T}\) 와 \(ml^{T}\) 각각의
outer product의 rank는 1이기 때문에outer product의 결합으로 이루어진 \(lm^{T} + ml^{T}\) 은 항상degenerate conic임을 만족합니다. - 위 슬라이드에서는 \(l\) 과 \(m\) 이
independent하여 \(C = lm^{T} + ml^{T}\) 의 \(\text{rank}(C) = 2\) 가 만족하는degenerate conic상황으로 가정합니다. 따라서 위 예시와 같이 교차하는 2개의 선으로 나타낼 수 있습니다. - 슬라이드의 \(C = lm^{T} + ml^{T}\) 를 좀더 자세하게 풀어 쓰면 다음과 같습니다.
- \[l = \begin{bmatrix} l_{1} \\ l_{2} \\ l_{3} \end{bmatrix}\]
- \[m = \begin{bmatrix} m_{1} \\ m_{2} \\ m_{3} \end{bmatrix}\]
- \[lm^{T} = \begin{bmatrix} l_{1}m_{1} & l_{1}m_{2} & l_{1}m_{3} \\ l_{2}m_{1} & l_{2}m_{2} & l_{2}m_{3} \\ l_{3}m_{1} & l_{3}m_{2} & l_{3}m_{3}\end{bmatrix}\]
- \[\begin{align} C = lm^{T} + ml^{T} &= \begin{bmatrix} l_{1}m_{1} & l_{1}m_{2} & l_{1}m_{3} \\ l_{2}m_{1} & l_{2}m_{2} & l_{2}m_{3} \\ l_{3}m_{1} & l_{3}m_{2} & l_{3}m_{3}\end{bmatrix} + \begin{bmatrix} m_{1}l_{1} & m_{1}l_{2} & m_{1}l_{3} \\ m_{2}l_{1} & m_{2}l_{2} & m_{2}l_{3} \\ m_{3}l_{1} & m_{3}l_{2} & m_{3}l_{3}\end{bmatrix} \\ &= \begin{bmatrix} l_{1}m_{1} + m_{1}l_{1} & l_{1}m_{2} + m_{1}l_{2} & l_{1}m_{3} + m_{1}l_{3} \\ l_{2}m_{1} + m_{2}l_{1} & l_{2}m_{2} + m_{2}l_{2} & l_{2}m_{3} + m_{2}l_{3} \\ l_{3}m_{1} + m_{3}l_{1} & l_{3}m_{2} + m_{3}l_{2} & l_{3}m_{3} + m_{3}l_{3}\end{bmatrix} \end{align}\]
- 위 식을 살펴 보면 \(C = lm^{T} + ml^{T}\) 는 대칭행렬이 됨을 알 수 있습니다.
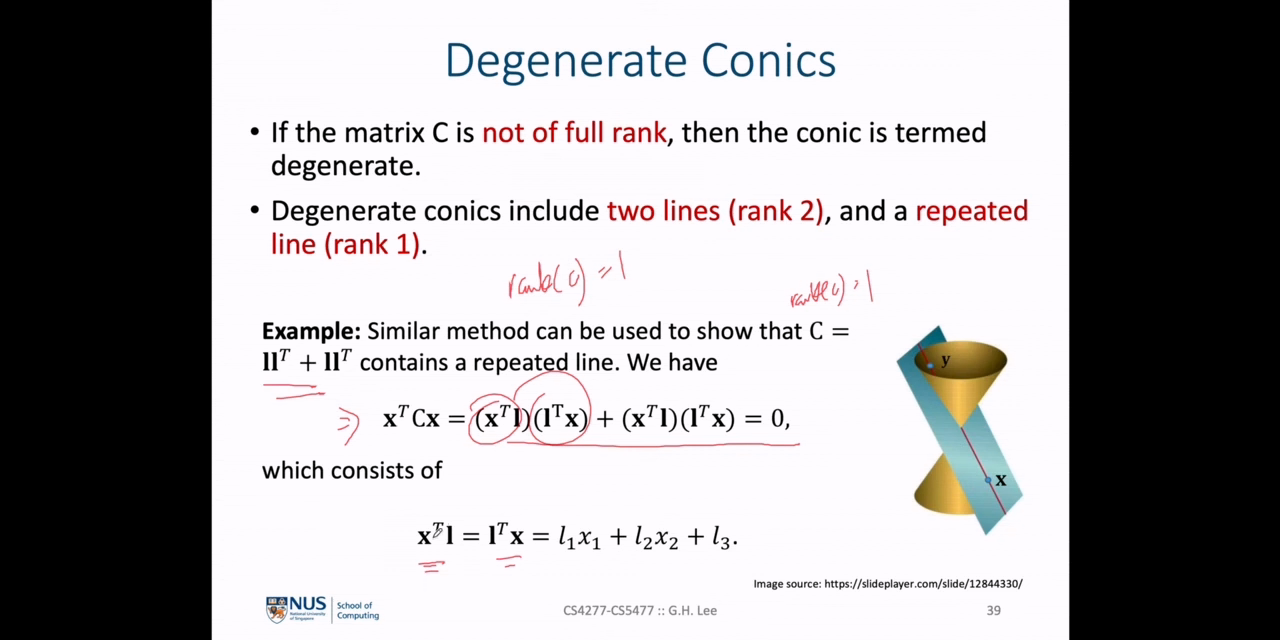
- 반면 위 슬라이드에서는 \(l = m\) 으로 나타내었기 때문에 한 개의 선으로 표현합니다. 따라서 \(\text{rank}(C) = 1\) 인
degenerate conic상황으로 가정합니다. 따라서 위 예시와 같이 하나의 선으로 나타낼 수 있습니다.
- \[x = \begin{bmatrix} x_{1} \\ x_{2} \\ x_{3} \end{bmatrix}\]
- \[y = \begin{bmatrix} y_{1} \\ y_{2} \\ y_{3} \end{bmatrix}\]
- \[xy^{T} = \begin{bmatrix} x_{1}y_{1} & x_{1}y_{2} & x_{1}y_{3} \\ x_{2}y_{1} & x_{2}y_{2} & x_{2}y_{3} \\ x_{3}y_{1} & x_{3}y_{2} & x_{3}y_{3}\end{bmatrix}\]
- \[\begin{align} C^{*} = xy^{T} + yx^{T} &= \begin{bmatrix} x_{1}y_{1} & x_{1}y_{2} & x_{1}y_{3} \\ x_{2}y_{1} & x_{2}y_{2} & x_{2}y_{3} \\ x_{3}y_{1} & x_{3}y_{2} & x_{3}y_{3}\end{bmatrix} + \begin{bmatrix} y_{1}x_{1} & y_{1}x_{2} & y_{1}x_{3} \\ y_{2}x_{1} & y_{2}x_{2} & y_{2}x_{3} \\ y_{3}x_{1} & y_{3}x_{2} & y_{3}x_{3}\end{bmatrix} \\ &= \begin{bmatrix} x_{1}y_{1} + y_{1}x_{1} & x_{1}y_{2} + y_{1}x_{2} & x_{1}y_{3} + y_{1}x_{3} \\ x_{2}y_{1} + y_{2}x_{1} & x_{2}y_{2} + y_{2}x_{2} & x_{2}y_{3} + y_{2}x_{3} \\ x_{3}y_{1} + y_{3}x_{1} & x_{3}y_{2} + y_{3}x_{2} & x_{3}y_{3} + y_{3}x_{3}\end{bmatrix} \end{align}\]
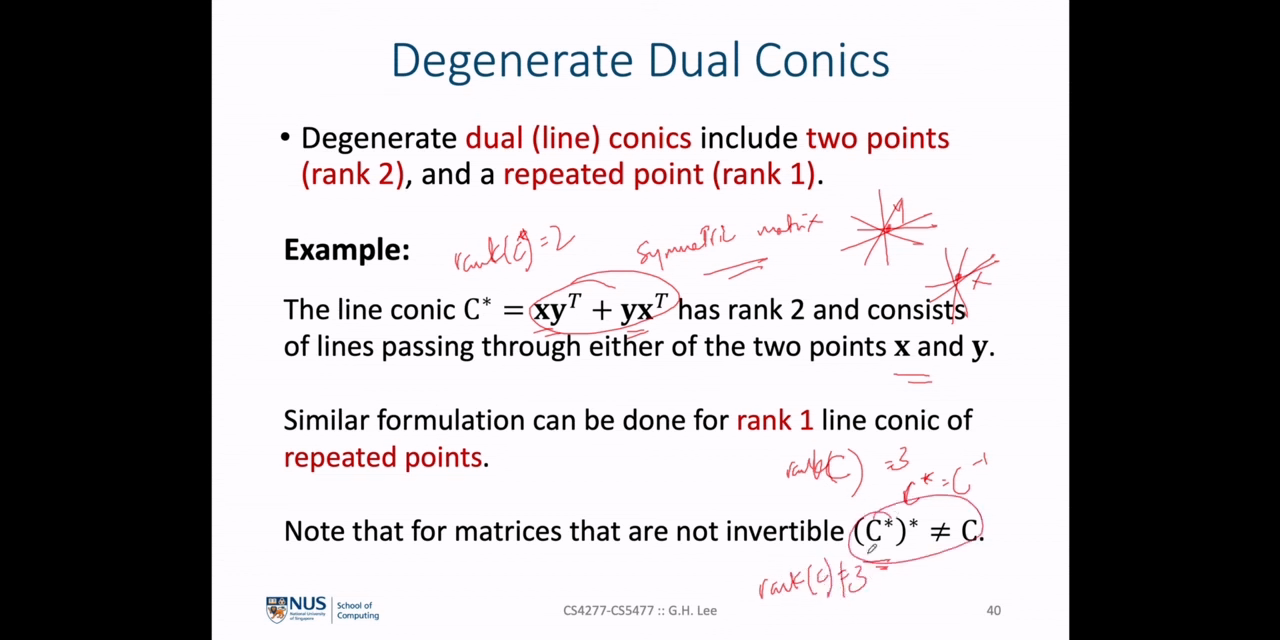
- 지금까지 배운 내용 종합하면
Point,Line,Two Lines,Circle,Ellipse,Hyperbola,Parabola을Conic을 이용하여 표현할 수 있음을 확인하였습니다. 이번에는 각 항목을 실제 예시를 들어서 어떻게 표현하는 지 살펴보도록 하겠습니다.
- ①
PointPoint는 \(3 \times 1\) 크기의 벡터로 표현이 가능합니다. 예를 들어inhomogeneous coordinate의 \((2, 3)\) Point는homogeneous coordinate에서 \((2, 3, 1)\) 로 표현됩니다. 만약conic을 이용하여Point를 표현하려면degenerate dual conic형태를 이용해야 합니다. 왜냐하면 점을 표현하려면 2개의 선 (Two Lines)이 한 점을 통과하는 형태를 나타내어야 하기 때문입니다.- 따라서 \((2, 3, 1)\) 을 지나는 두 개의 선 \(l = (1, 0, -2)^{T}\) 와 \(m = (0, 1, -3)^{T}\) 를 이용하여
degenerate dual conic을 나타내면 다음과 같습니다.
- \[\begin{align} C^{*} &= lm^{T} + ml^{T} \\ &= \begin{bmatrix} 1 \\ 0 \\ -2 \end{bmatrix} \begin{bmatrix} 0 & 1 & -3 \end{bmatrix} + \begin{bmatrix} 0 \\ 1 \\ -3 \end{bmatrix} \begin{bmatrix} 1 & 0 & -2 \end{bmatrix} \\ &= \begin{bmatrix} 0 & 1 & -3 \\ 1 & 0 & -2 \\ -3 & -2 & 12 \end{bmatrix} \end{align}\]
- 위 식의 \(C^{*}\) 는 두 선의 교점을 나타내므로 두 선의 교점인
Point\(x = (2, 3, 1)\) 는 다음식을 만족하여 \(C^{*}\) 가Point를 나타냄을 알 수 있습니다.
- \[x^{T} C^{*} x = \begin{bmatrix} 2 \\ 3 \\ 1 \end{bmatrix} \begin{bmatrix} 0 & 1 & -3 \\ 1 & 0 & -2 \\ -3 & -2 & 12 \end{bmatrix} \begin{bmatrix} 2 & 3 & 1 \end{bmatrix} = 0\]
- ②
LineLine은 2개의 점을 이용하여 생성할 수 있습니다. 따라서homogeneous coordiate의 2개의 점을 이용하여 \(C\) 를 구성하면degenerate conic으로 선을 표현할 수 있습니다.- 아래 예제는 \(l = x + 2y - 3 \to (1, 2, -3)\) 이라는 식을 표현하기 위하여 2개의 점 \(a = (3, 0, 1)\) 과 \(b = (0, 1.5, 1)\) 을 이용해 보겠습니다. 두 점은 \(l\) 상에 존재합니다.
- \[\begin{align} C &= ab^{T} + ba^{T} \\ &= \begin{bmatrix} 3 \\ 0 \\ 1 \end{bmatrix} \begin{bmatrix} 0 & 1.5 & 1 \end{bmatrix} + \begin{bmatrix} 0 \\ 1.5 \\ 1 \end{bmatrix} \begin{bmatrix} 3 & 0 & 1 \end{bmatrix} \\ &= \begin{bmatrix} 0 & 4.5 & 3 \\ 4.5 & 0 & 1.5 \\ 3 & 1.5 & 2 \end{bmatrix} \end{align}\]
- 위 식의 \(C\) 는
Line을 나타내므로 다음과 같이 확인해 볼 수 있습니다.
- \[l^{T} C l = \begin{bmatrix} 1 \\ 2 \\ -3 \end{bmatrix} \begin{bmatrix} 0 & 4.5 & 3 \\ 4.5 & 0 & 1.5 \\ 3 & 1.5 & 2 \end{bmatrix} \begin{bmatrix} 1 & 2 & -3 \end{bmatrix} = 0\]
- ③
Two LinesTwo Lines를 나타내는Conic은 앞에서Point를 나타내는Conic을 통해 다루었습니다. \(l = (1, 2, -3)\) , \(m = (2, -1, 4)\) 가 있을 때, 이 두 선을 나타내는degenerate dual conic은 다음과 같습니다.
- \[\begin{align} C^{*} &= lm^{T} + ml^{T} \\ &= \begin{bmatrix} 1 \\ 2 \\ -3 \end{bmatrix} \begin{bmatrix} 2 & -1 & 4 \end{bmatrix} + \begin{bmatrix} 2 \\ -1 \\ 4 \end{bmatrix} \begin{bmatrix} 1 & 2 & -3 \end{bmatrix} \\ &= \begin{bmatrix} 4 & 3 & -2 \\ 3 & -4 & 11 \\ -2 & 11 & -24 \end{bmatrix} \end{align}\]
- 선 \(l\) 상의 점 \(x_{1} = (-1, 2, 1)\) 과 \(m\) 상의 점 \(x_{2} = (-2, 0, 1)\) 모두 다음과 같이 계산하면 \(C^{*}\) 이 두 선을 나타냄을 알 수 있습니다.
- \[x_{1}^{T} C^{*} x_{1} = \begin{bmatrix} -1 \\ 2 \\ 1 \end{bmatrix} \begin{bmatrix} 4 & 3 & -2 \\ 3 & -4 & 11 \\ -2 & 11 & -24 \end{bmatrix} \begin{bmatrix} -1 & 2 & 1 \end{bmatrix} = 0\]
- \[x_{2}^{T} C^{*} x_{2} = \begin{bmatrix} -2 \\ 0 \\ 1 \end{bmatrix} \begin{bmatrix} 4 & 3 & -2 \\ 3 & -4 & 11 \\ -2 & 11 & -24 \end{bmatrix} \begin{bmatrix} -2 & 0 & 1 \end{bmatrix} = 0\]
- ④
Circle- 앞에서 다룬
Conic유도식의 \(a \cdot x_{1}^{2} + b \cdot x_{1}x_{2} + c \cdot x_{2}^{2} + d \cdot x_{1}x_{3} + e \cdot x_{2}x_{3} + f \cdot x_{3}^{2} = 0\) 을 통하여 \((h, k)\) 를 원의 중심으로 가지는 반지름 \(r\) 인 원은 다음과 같은 형태를 가짐을 알 수 있습니다.
- \[C = \begin{bmatrix} 1 & 0 & -h \\ 0 & 1 & -k \\ -h & -k & h^{2} + k^{2} -r^{2} \end{bmatrix}\]
- 예를 들어 원의 중심이 \((0, 0)\) 이고 반지름이 \(1\) 인 원이라면 다음과 같이 표현할 수 있습니다.
- \[C = \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & -1 \end{bmatrix}\]
- 앞에서 다룬
- ⑤
Ellipse- 타원 또한 위 식을 통하여
Conic을 유도하면 타원의 중심은 \((h, k)\) 이고 장축의 길이는 \(a\) , 단축의 길이는 \(b\) 일 경우 다음과 같이 정의할 수 있습니다.
- \[\frac{(x - h)^{2}}{a^{2}} + \frac{(y-k)^{2}}{b^{2}} = 1\]
- \[C = \begin{bmatrix} 1/a^{2} & 0 & -h/a^{2} \\ 0 & 1/b^{2} & -k/b^{2} \\ -h/a^{2} & -k/b^{2} & h^{2}/a^{2} + k^{2}/b^{2} - 1 \end{bmatrix}\]
- 예를 들어 타원의 중심이 \((2, 3)\) 이고 장축의 길이가 \(4\) , 단축의 길이가 \(2\) 라면
Conic은 다음과 같이 정의 됩니다.
- \[C = \begin{bmatrix} 1/16 & 0 & -1/8 \\ 0 & 1/4 & -3/4 \\ -1/8 & -3/4 & 7/16 \end{bmatrix}\]
- 타원 또한 위 식을 통하여
- ⑥
Hyperbola- 쌍곡선도 타원의 예시와 유사하게 다음과 같이 정의할 수 있습니다.
- \[\frac{(x - h)^{2}}{a^{2}} - \frac{(y-k)^{2}}{b^{2}} = 1\]
- \[C = \begin{bmatrix} 1/a^{2} & 0 & -h/a^{2} \\ 0 & -1/b^{2} & k/b^{2} \\ -h/a^{2} & k/b^{2} & h^{2}/a^{2} - k^{2}/b^{2} - 1 \end{bmatrix}\]
- ⑦
Parabola- 마지막으로 포물선의 경우 포물선의 꼭지점이 \((h, k)\) 이고 width \(a\) 는 다음과 같이 정의 할 수 있습니다.
- \[(y - k) = a(x - h)^{2}\]
- \[y - k - a(x-h)^{2} = 0\]
- $$ C = \begin{bmatrix} 0 & -a/2 & ah \ -a/2 & 1 & -k \ ah & -k & -h^{2} \end{bmatrix}
- 예를 들어 포물선의 꼭지점이 \((2, 3)\) 이고 \(a = 1\) 이라면 다음과 같이
conic을 구성할 수 있습니다.
- \[C = \begin{bmatrix} 0 & -1/2 & 2 \\ -1/2 & 1 & -3 \\ 2 & -3 & -4 \end{bmatrix}\]
- 지금까지 살펴본 방식으로 기하학에서 흔히 다루는 7 가지 경우에 대하여 모두
conic으로 나타낼 수 있음을 확인하였습니다.
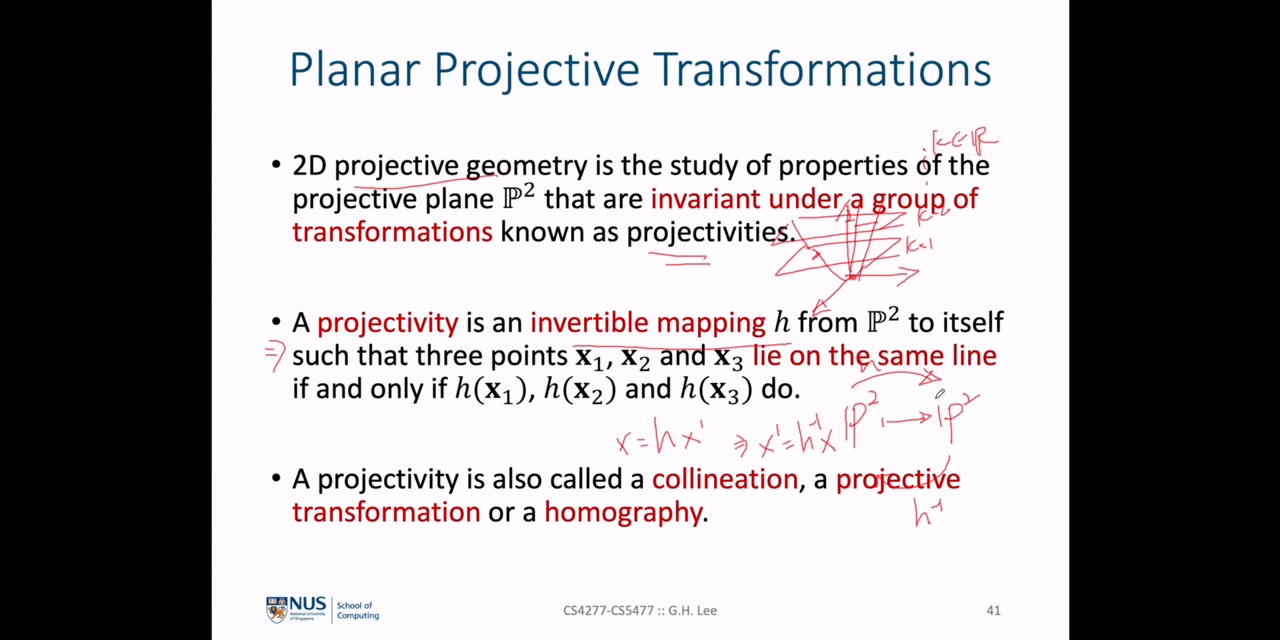
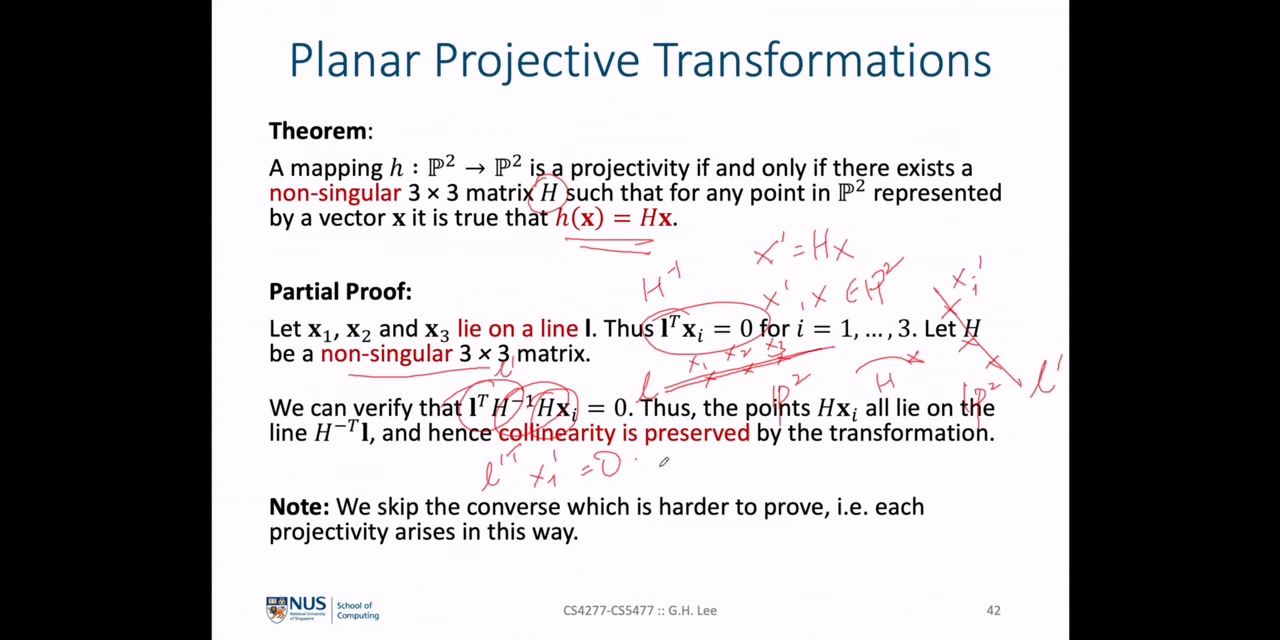
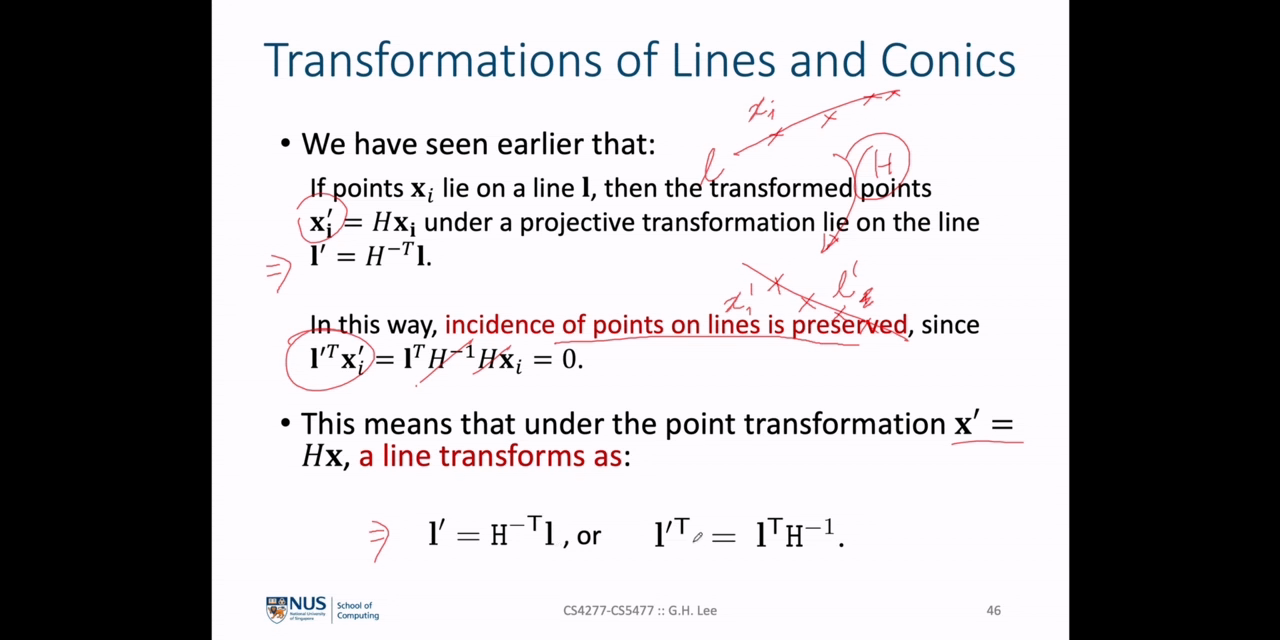
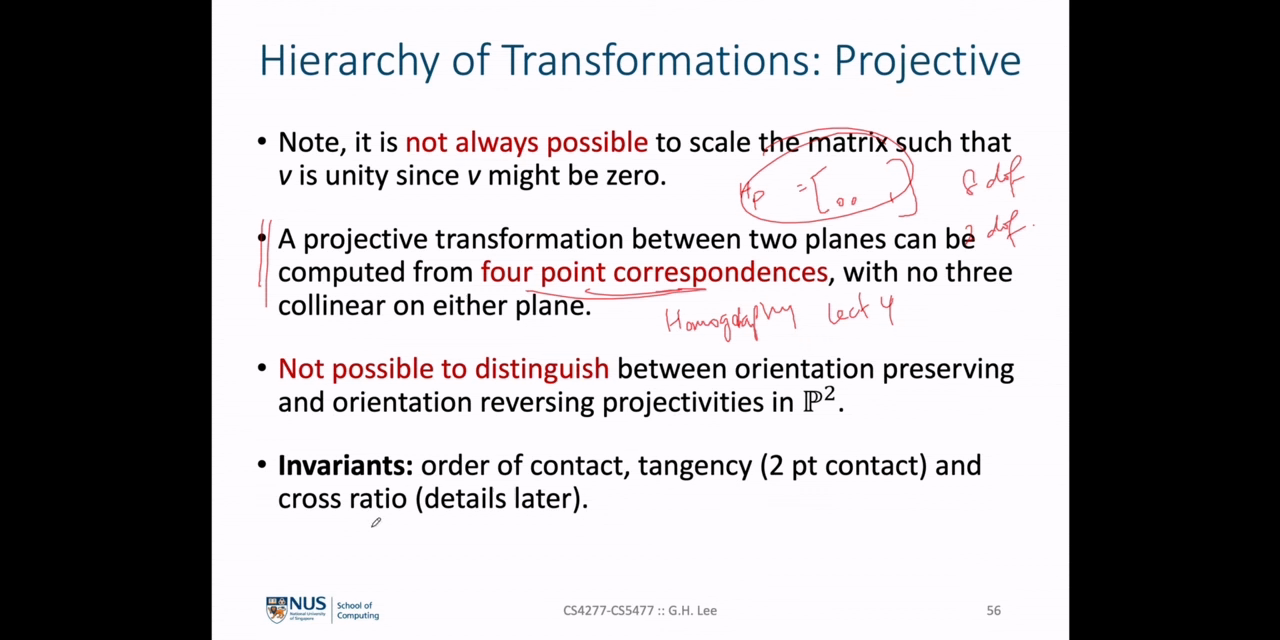
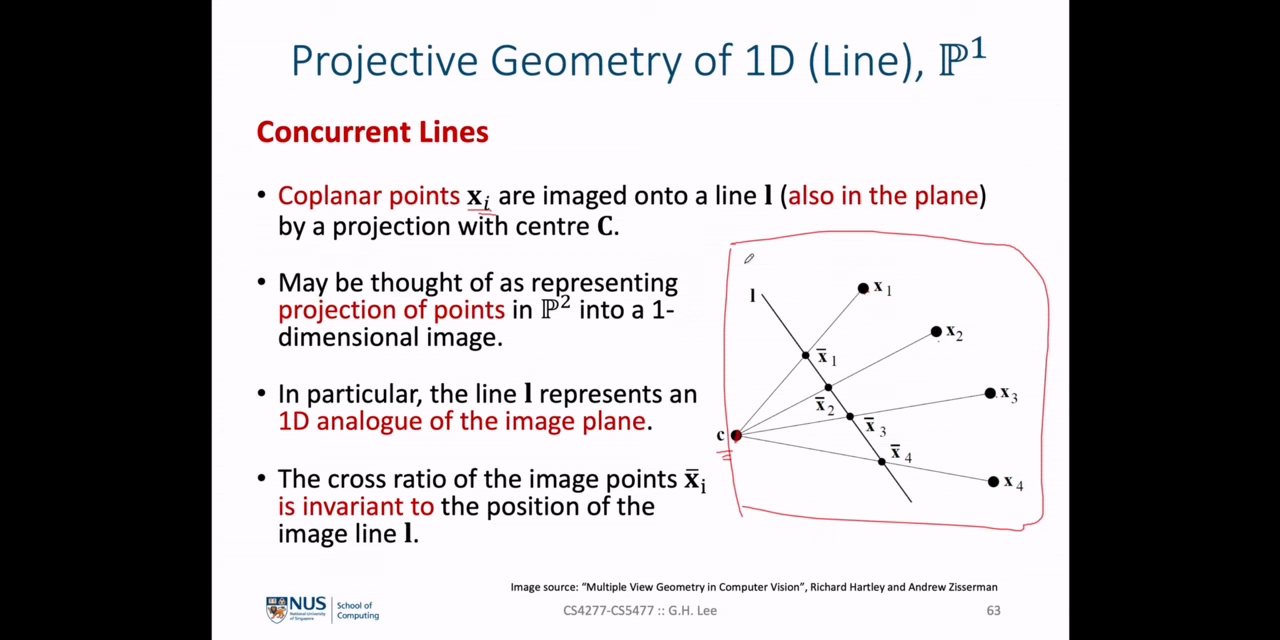
- point \(x_{i}\) 가 line \(l\) 위에 있을 때, \(l^{T} x_{i} = 0\) 으로 표현할 수 있습니다. 만약 transformed point (
projective transformation) 인 \(x_{i}' = H x_{i}\) 가 \(l'\) 위에 있다면 \({l'}^{T} x_{i}' = 0\) 이 되고 \(l\) 과 \(l'\) 두 line의 관계로 나타내면 \(l' = H^{-T} l\) 으로 표현할 수 있습니다. 수식 전개 과정은 아래와 같습니다.
- \[x_{i}' = H x_{i}\]
- \[{l'}^{T} x_{i}' = 0\]
- \[\therefore \quad {l'}^{T} H x_{i} = 0\]
- \[{l'}^{T} H x_{i} = l^{t} x_{i}\]
- \[{l'}^{T} H = l^{t}\]
- \[H^{T} l' = l\]
- \[\therefore \quad l' = H^{-T} l\]
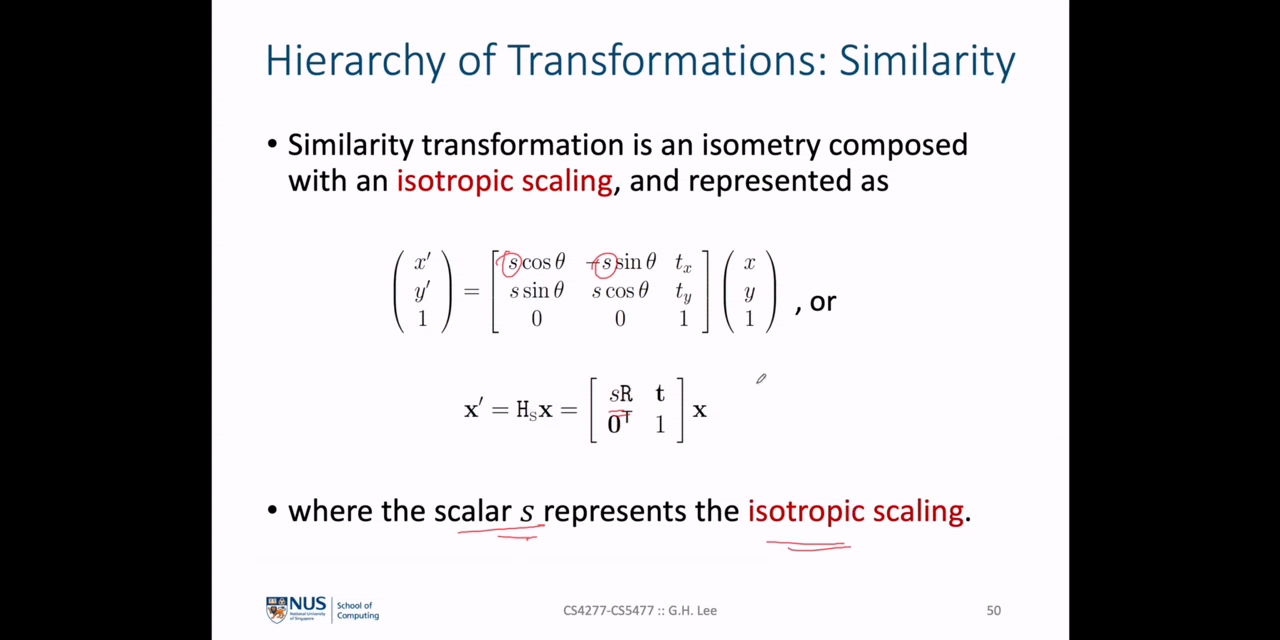
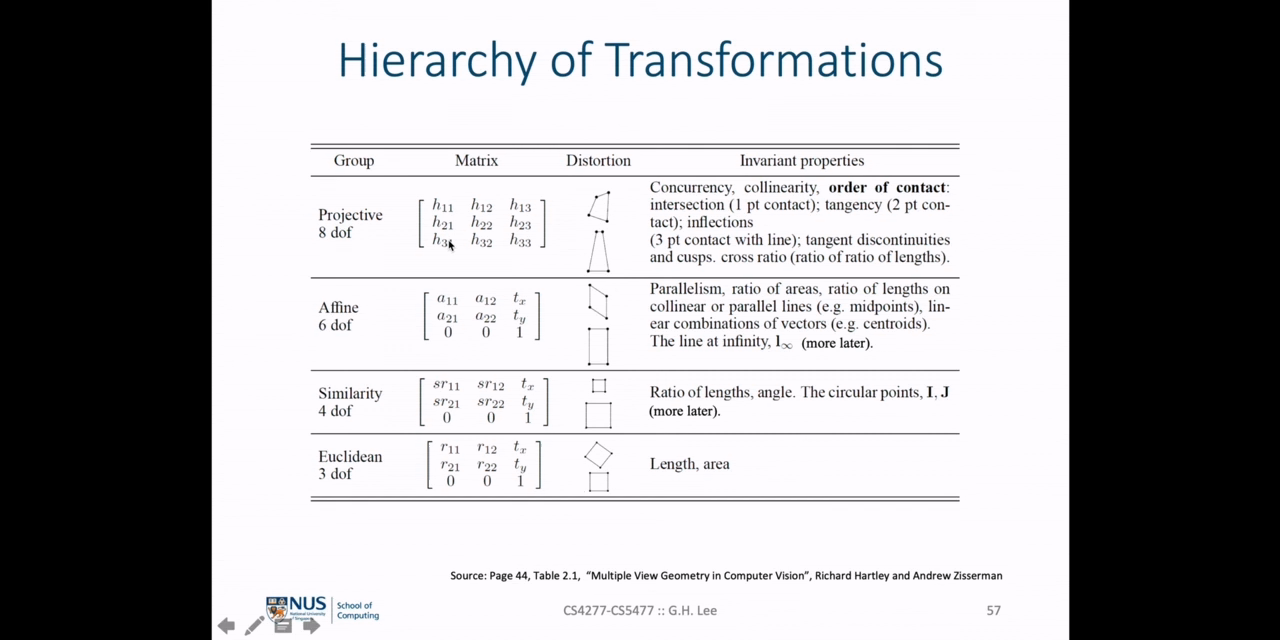
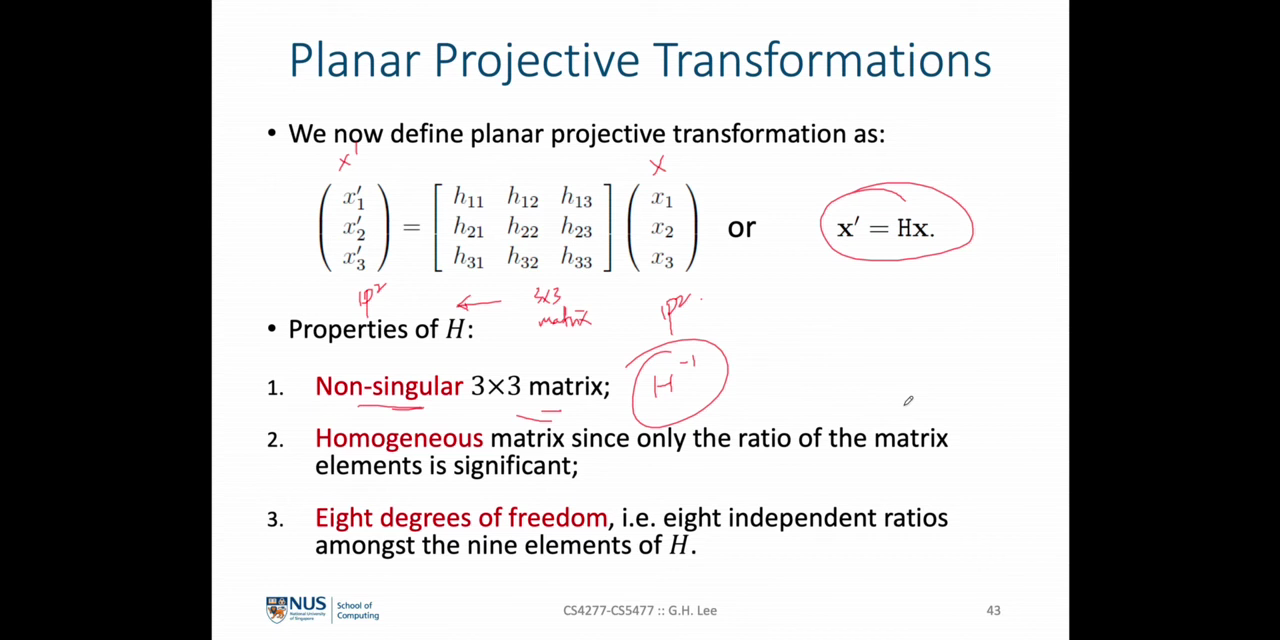
Similarity Transformation은isotropic scaling으로 구성되며 위 슬라이드의 식 처럼 표현됩니다.isotropic이란 한글로 등방형이며 방향에 상관없이 일정하다는 뜻입니다. 즉,Similarity Transformation은 모든 방향에 동일한 효과를 적용합니다.- 위 식에서 \(s\) 는
isotropic scaling이라고 하며 Similarity Transformation 적용 시 변환의 크기를 조절합니다.
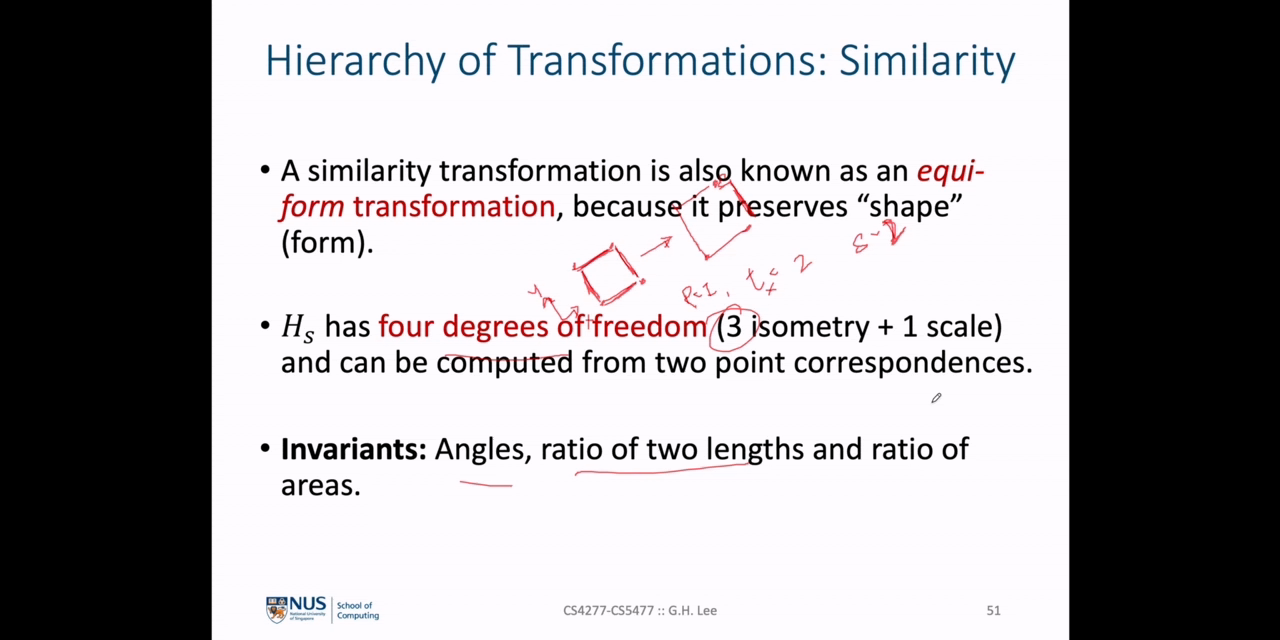
Similarity Transformation은shape을 보존하기 때문에equi-form transformation이라고도 합니다.- 식에서 나타난 바와 같이 3개의
isometryDoF ( \(\theta, t_{x}, t_{y}\) )와isotropic scaling\(s\) 를 가지므로Similarity Transformation은 총 4 DoF를 가지며 DoF가 4개이므로 변환된 2개의 점을 알 때, 이 값들을 추정할 수 있습니다. shape이 보존되기 때문에Angle,ratio of two lengths,ratio of areas는 보존이되는 성질을 가집니다. 평행선은 평행선으로 유지되는 것 또한 중요한 성질입니다.
- 그 다음으로
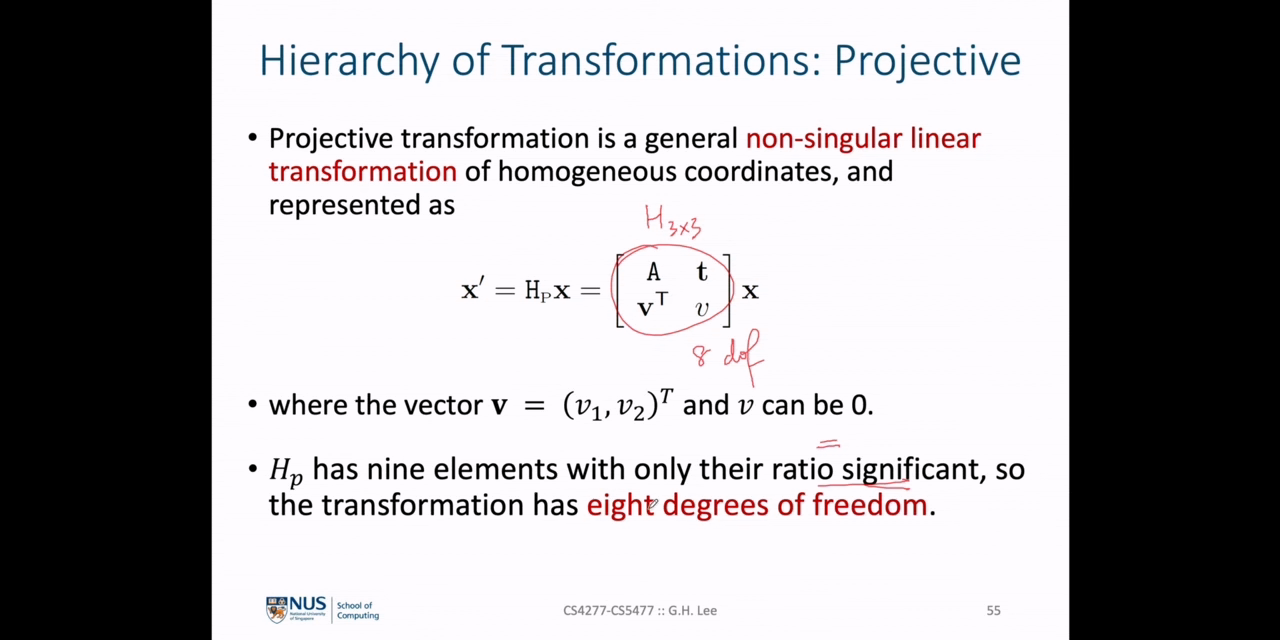
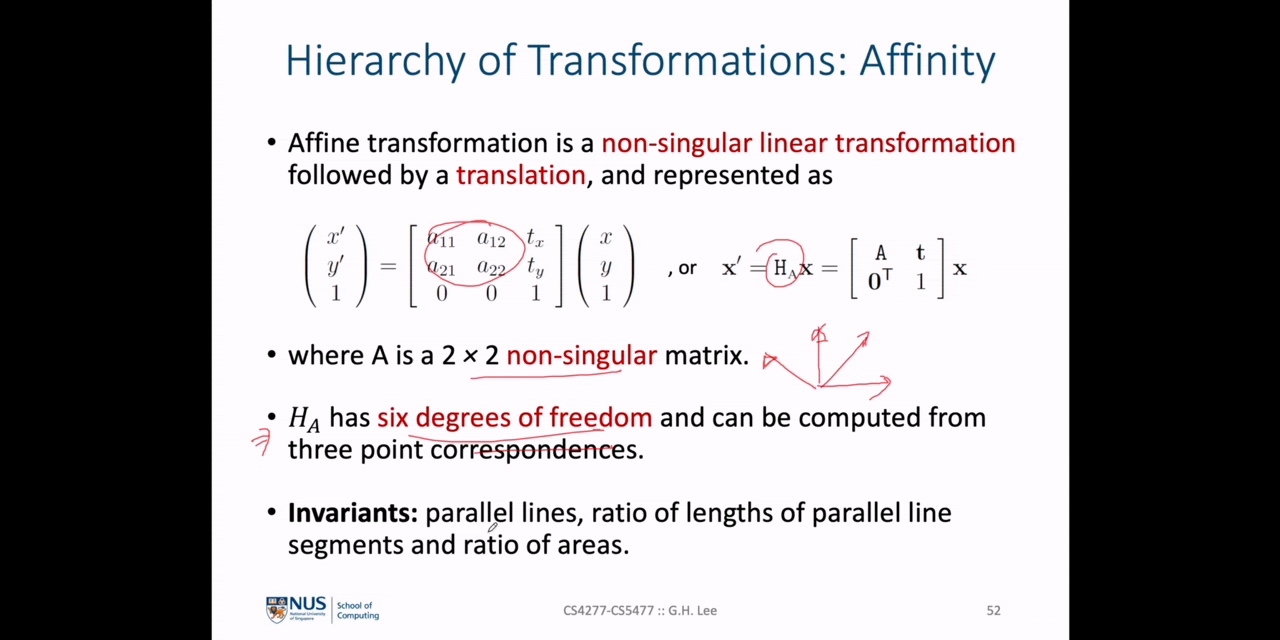
Affinity에 대하여 다루어 보도록 하겠습니다. - 위 슬라이드에서 설명하는
Affine Transformation행렬은non-singular linear transformation으로 간단히 말하면 역행렬이 존재하는 행렬이며 \(A\) 부분의 2 X 2 행렬 또한non-singular matrix로 역행렬이 존재합니다. - 앞에서 살펴본
Similarity Transformation과 다르게 6 DoF로 DoF가 2개가 더 추가가 되었습니다. Similarity Transformation에서는 \(\theta\) 가 정해지면 \(H_{S}\) 가 정해졌으나Affine Transformation에서는 4개의 각 성분이 모두 DoF를 가지기 때문에 DoF가 총 6개가 됩니다. - DoF가 6개이므로 기존의 3개의 점이
Affine Transformation적용 시 어떻게 변환되는 지 관계를 알면Affine Transformation을 구할 수 있습니다. (Similarity Transformation에서는 점 2개가 필요하였습니다.) Affine Transformation을 적용하더라도 평행선은 그대로 유지되며 평행 선분의 길이 비율과 면적 비율은 유지됩니다. 반면 Similarity Transformation에서는 보존되었던 임의의 선의 길이 비율과 선 사이의 각도는 보존되지 않습니다. 그 이유에 대하여Affine Transformation Matrix를 분해하여 살펴보도록 하겠습니다.
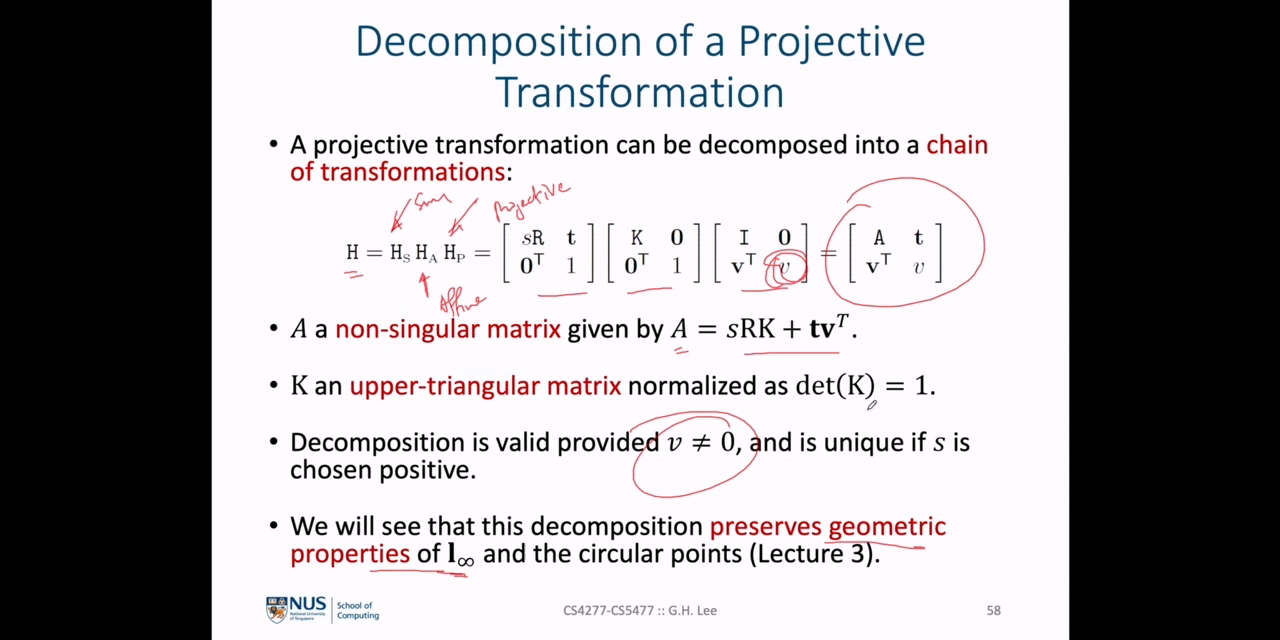
- 이번 슬라이드와 다음 슬라이드에서는
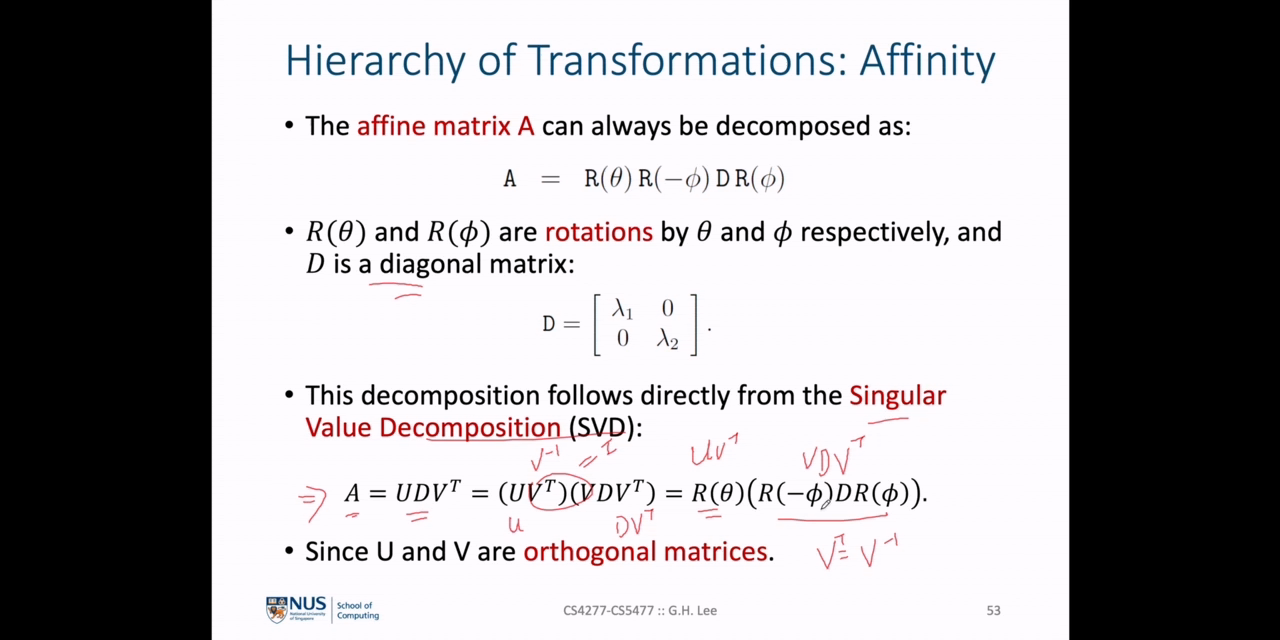
Affine Transformation을SVD(Singular Value Decomposition)으로 분해하였을 때, 각 성분이 가지는 의미를 나타냅니다. 위 슬라이드에서는 먼저 어떻게 분해될 수 있는 지 설명합니다.
Affine Transformation의 의미를 기하학적으로 이해하기 위한 방법으로rotation과non-isotropic scaling두 가지 선형 변환의 합성으로 생각하는 방법이 있습니다. 먼저Affine Transformation은 아래와 같이 분해 됩니다.
- \[A = R(\theta) R(-\phi) D R(\phi)\]
- \[R(\theta), R(\phi) \text{ : rotation by} \theta, \phi \text{ respectively}\]
- \[D = \begin{bmatrix} \lambda_{1} & 0 \\ 0 & \lambda_{2} \end{bmatrix} \text{ : diagonal matrix}\]
- 위 식과 같이 분해되는 이유는 아래와 같습니다.
affine transformation matrix를Singular Value Decomposition을 하고 SVD 결과의 \(U, V\) 가orthogonal matrix이므로 \(U^{-1} = U^{T}\) , \(V^{-1} = V^{T}\) 임을 이용하여 전개하였습니다.
- \[A = U D V^{T} = U (V^{-1}V) D V^{T} = U (V^{T}V) D V^{T} = (U V^{T})V D V^{T}\]
- \[= R(\theta)(R(-\phi) D R(\phi))\]
- 회전 행렬 관련 글에서 다룬 바와 같이
orthogonal matrix는rotation임을 만족하며orthogonal matrix의 곱 또한rotation임을 만족함을 알 수 있습니다. - 따라서 \(UV^{T} = R(\theta)\), \(V = R(-\phi)\), \(V^{T} = R(\phi)\) 로 표현할 수 있어서 위 식과 같이 전개됩니다.
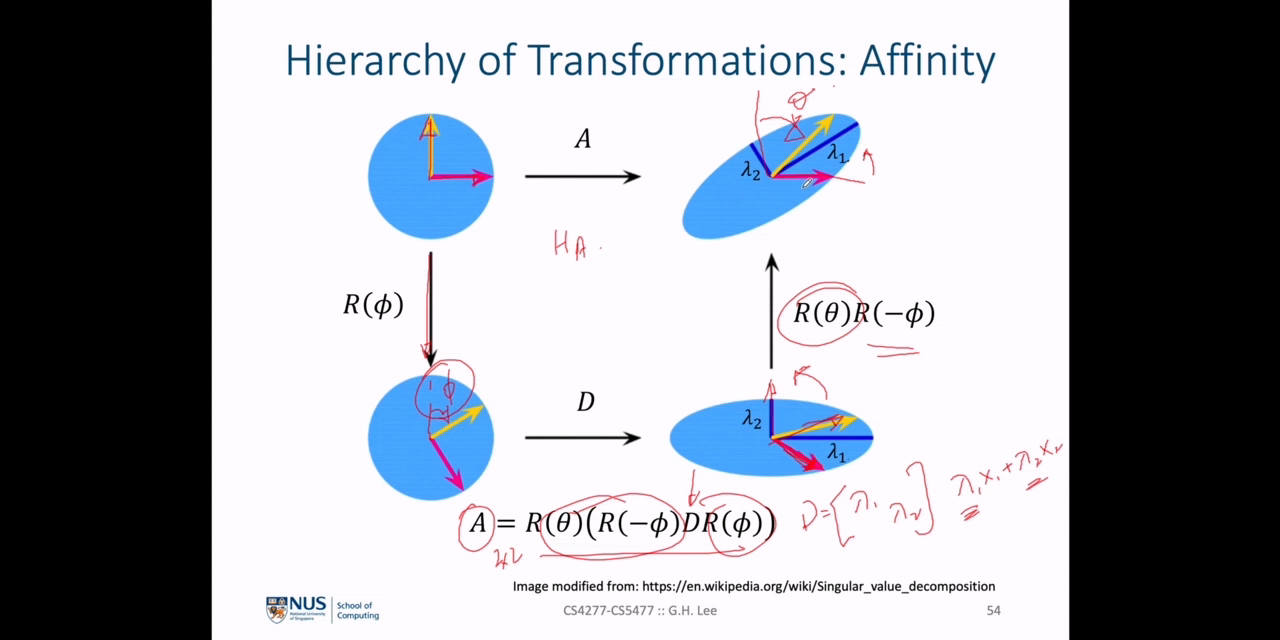
- 따라서 식을 위 슬라이드와 같이 시각적으로 나타낼 수 있습니다. 위 슬라이드는
affine transformation인 \(A\) 를 바로 적용한 결과를 \(R(\phi)\) , \(D\) , \(R(\theta)R(-\phi)\) 순서로 나누어서 보여줍니다. - 즉
affine transformation\(A\) 에서의 연산 순서는- ① \(\phi\) 만큼 회전합니다.
- ② \(x, y\) 방향으로 각각 \(\lambda_{1}, \lambda_{2}\) 만큼
scaling을 조정합니다. (\(\lambda_{1}x_{1} + \lambda_{2}x_{2}\) ) - ③ \(-\phi\) 만큼 역회전 합니다. 즉, \(\phi\) 만큼 회전한 영역에서 주성분 방향으로
scaling을 조정하고 다시 역회전하여 회전을 없앱니다. - ④ 마지막으로 \(\theta\) 만큼 회전합니다.
- 이와 같은 순서로 연산을 살펴보았을 때,
similarity transformation에 비하여 추가된 개념은non-isotropic scaling입니다. 즉,scaling조정 방향을 지정하는 각도 \(\phi\) 와 scaling 조정 비율인 \(\lambda{1}, \lambda_{2}\) 가 이에 해당합니다. - 따라서
affine transformation에서는 특정 각도에 대하여 직교하는 방향으로 scaling을 조정하는 것이 중요합니다.
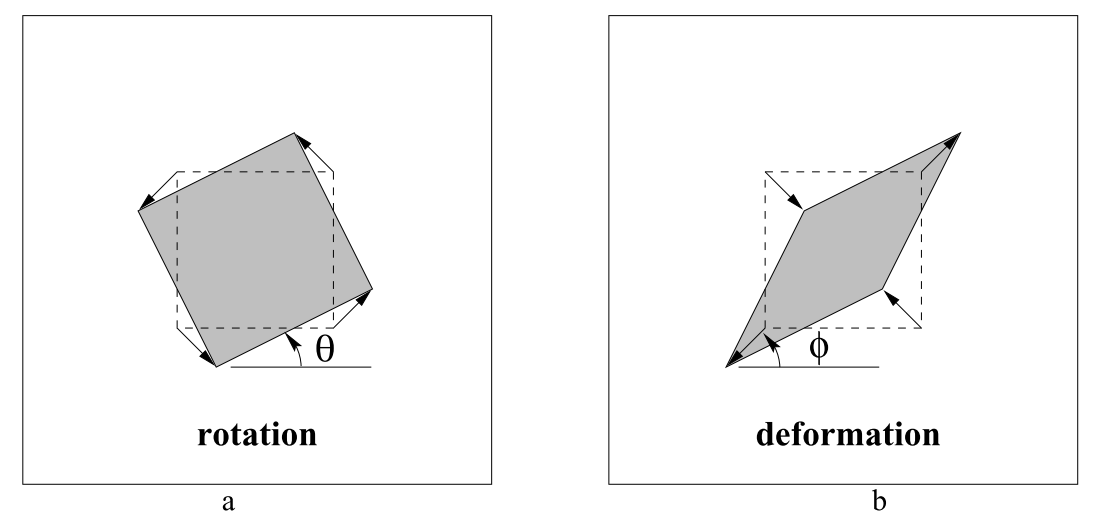
- 그림으로 나타내면 왼쪽 그림은 최종 \(R(\theta)\) 에 의한 회전을 나타내고 오른쪽 그림은 \(R(-\phi)DR(\phi)\) 에 의한 변형을 나타냅니다.
scaling방향으로orthogonal함을 유심히 살펴보면 이해하는 데 도움이 됩니다.