축각 회전 (Axis-Angle Rotation) 또는 로드리게스 회전 (Rodrigues Rotation)
2022, May 10
- 참조 : 이득우의 게임 수학
- 참조 : https://mycom333.blogspot.com/2014/01/axis-angle-rotation.html
- 사전 지식 : Euler Angle Rotation
- 사전 지식 : 벡터의 내적과 정사영
- 사전 지식 : 벡터의 외적(cross product)
- 이번 글에서는 3차원 회전의 대표적인 방법 중 하나인
Axis-Angle Rotation에 대하여 다루어 보도록 하겠습니다. 이 방법은 방법론을 제시한 로드리게스의 이름을 따서 로드리게스 회전이라고도 불립니다. 본 글에서는Axis-Angle Rotation으로 사용하겠습니다.
목차
-
Axis-Angle Rotation의 필요성
-
Axis-Angle Rotation 수식 설명
-
Axis-Angle Rotation의 행렬식 표현
-
Axis-Angle Rotation의 Python code
-
Axis-Angle Rotation의 단점
Axis-Angle Rotation의 필요성
Axis-Angle Rotation은Euler Angle의 단점을 개선할 수 있는 3차원 회전 방법으로 사용 됩니다.Euler Angle을 이용한 3차원 회전은 직관적이며 단순하다는 장점이 있지만 크게 2가지 문제점이 있습니다. 바로Gimbal Lock (짐벌 락)현상과Rotaional Interpolation (회전 보간)의 한계점 입니다.- 이와 관련된 상세 내용은 아래 링크에서도 확인할 수 있습니다.
- 링크 : https://gaussian37.github.io/math-la-rotation_matrix/
- ①
Gimbal Lock현상은 X, Y, Z 축을 90도 회전 시키다 보면 어떤 2개의 축의 회전이 동일해져 버리는 현상을 말합니다. 세 개의 축으로 자유롭게 회전할 수 있었는데 두 개의 축만 회전할 수 있도록 어떤 축의 회전이Lock이 걸려 버리기 때문에Gimbal Lock이라고 표현합니다. 아래 영상을 참조하시면 바로 이해가 되실 겁니다.
- 위 그림과 같이 90도 회전 시, 축이 사라지는 현상이 발생하는 것을 의미합니다.
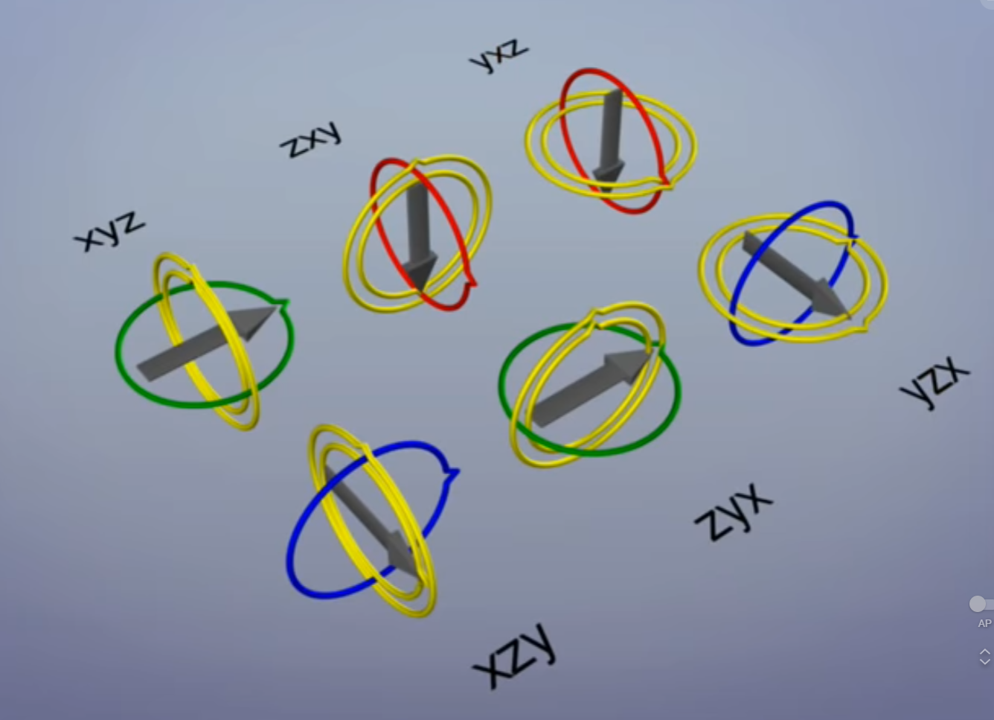
- 각 축으로 어떻게 90도 회전 하는 것에 따라서 위 그림 처럼 다양한 형태로
Gimbal Lock이 발생합니다. - 물론 이와 같이 항상 축이 사라지지는 않으며 어떤 각도로 먼저 회전할 지에 따라서 문제가 되지 않을 수 있습니다. 따라서
Euler Angle에서의Gimbal Lock문제를 회피하기 위한 방법들이 존재 (위 링크 참조) 하지만, 근본적인 해결을 위해서는 다른 방법의 3차원 회전이 필요합니다.
- ②
Rotaional Interpolation은 3차원 회전 시 시작 회전과 끝 회전을 지정하면 두 회전 사이를 부드럽게 전환할 수 있어야 함을 의미합니다. 파워포인트부터 다양한 3D 툴에서 회전량을 지정하면 애니매이션 효과를 줄 수 있는데, 이 때 사용되는 중간 중간의 움직임을 의미합니다. - 이러한 동작을 구현하기 위해서는 경과된 시간에 따라 회전이 변화되도록 중간 회전값을 계산할 수 있어야 하는데 결과적으로
Euler Angle에서는 두 축 이상을 사용하는Euler Angle의linear interpolation을 사용할 수 없습니다. 1개의 축만 사용하여 회전할 때에는 문제가 없지만 2개의 축 이상을 사용할 때에는 이 부분이 문제가 발생합니다. 이 문제 또한 자세한 문제는 위 링크를 참조하시면 됩니다.
- 이와 같은 2가지 문제점을 해결하기 위하여 본 글에서는 다루는
Axis-Angle Rotation을 사용하거나Quaternion을 사용하여 3차원 회전을 이용합니다. 이 2가지 해결책에도 각각 장단점이 있습니다. - 본 글에서는
Axis-Angle Rotation을 알아볼 것입니다.Axis-Angle Rotation은 임의의 축에 직교하는 평면에 대한 임의의 회전을 할 수 있는 컨셉입니다. 따라서Euler Angle보다 더 유연하게 3차원 회전을 할 수 있습니다.
Axis-Angle Rotation 수식 설명
- 앞에서 언급한 바와 같이
Axis-Angle Rotation은 임의의 축에 대한 평면의 회전 방식을 이용합니다.
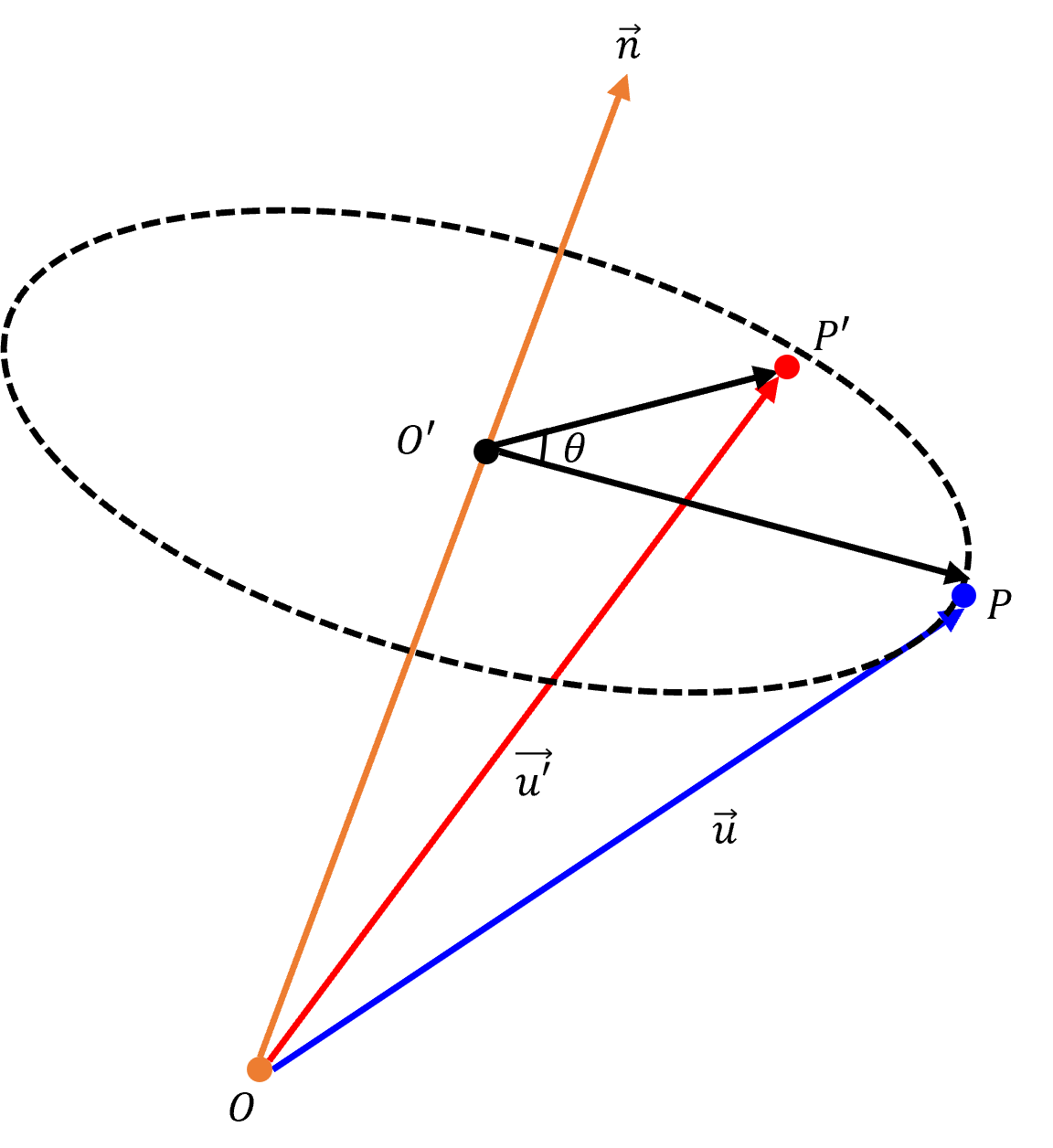
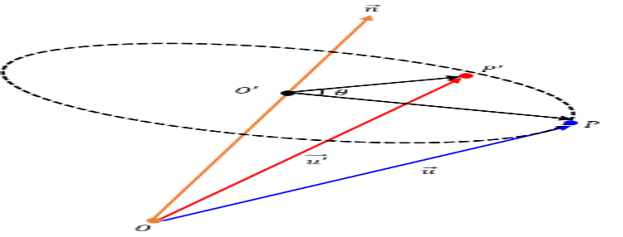
- 위 그림과 같이 3차원 공간에서 임의의 주황색 축을 이용하고 주황색 축에 직교 하는 검은색 점선 평면에서 회전을 하는 방식으로 3차원 회전을 합니다. 벡터의 내적과 외적 연산을 통하여 3차원 회전을 계산할 수 있으며 이 방법에 대하여 알아보도록 하겠습니다.
- 회전축이 되는 주황색 선을 \(\vec{n}\), 회전시킬 점을 \(P\), 회전할 각을 \(\theta\), 최종 회전한 점을 \(P'\), 월드 공간의 원점을 \(O\), 회전 평면의 중심을 \(O'\) 로 정하겠습니다.
- 즉, 회전축은 월드 공간의 원점을 기점으로 뻗은 벡터이며 그 벡터 상의 특정 위치에 직교하는 평면이 생기고 그 평면을 기준으로 \(\theta\) 만큼 회전하기 때문에 임의의 방향 및 크기대로 3차원 회전을 할 수 있는 원리 입니다.
- 지금부터 살펴볼 전개 방식은 위 그림에서 \(\vec{OO'} + \vec{O'P'} = \vec{u'}\) 가 되는 구조로 먼저 \(\vec{OO'} = \vec{v}\) 를 살펴보고 그 다음 \(\vec{O'P'}\) 를 살펴보도록 하겠습니다.
- 이 과정을 통하여 최종적으로 구하고 싶은 \(\vec{u'}\) 를 구할 수 있습니다.
① OO’ 벡터 구하기
- 위 그림에서 점 \(P\) 의 좌표를 동차좌표계로 \(P = (x, y, z, 1)\) 로 나타내 보겠습니다.
- 그러면 다음과 같이 간단하게 \(\vec{u}\) 를 구할 수 있습니다.
- \[\vec{u} = P - O = (x, y, z, 0)\]
- 최종적으로 구하고자 하는 벡터는 위 그림에서 \(\vec{u'}\) 이고 이 값을 구하기 위해서는 \(\vec{u}\) , \(\vec{n}\) , \(\theta\) 가 필요합니다.
- 임의의 축 \(\vec{n}\) 에 대하여 \(\vec{u}\) 를 각 \(\theta\) 만큼 회전시켜 \(\vec{u'}\) 를 계산하는
Axis-Angle Rotation의 식은 다음과 같습니다. 아래 식의 \(\hat{n}\) 은 \(\vec{n}\) 의 크기가 1인 벡터 입니다.
- \[\vec{u'} = \cos{(\theta)} \cdot \vec{u} + (1 - \cos{(\theta)}) \cdot (\vec{u} \cdot \hat{n}) \hat{n} + \sin{(\theta)} \cdot (\hat{n} \times \vec{u}) \tag{1}\]
- 지금부터는 이 식의 유도 과정을 살펴보도록 하겠습니다.
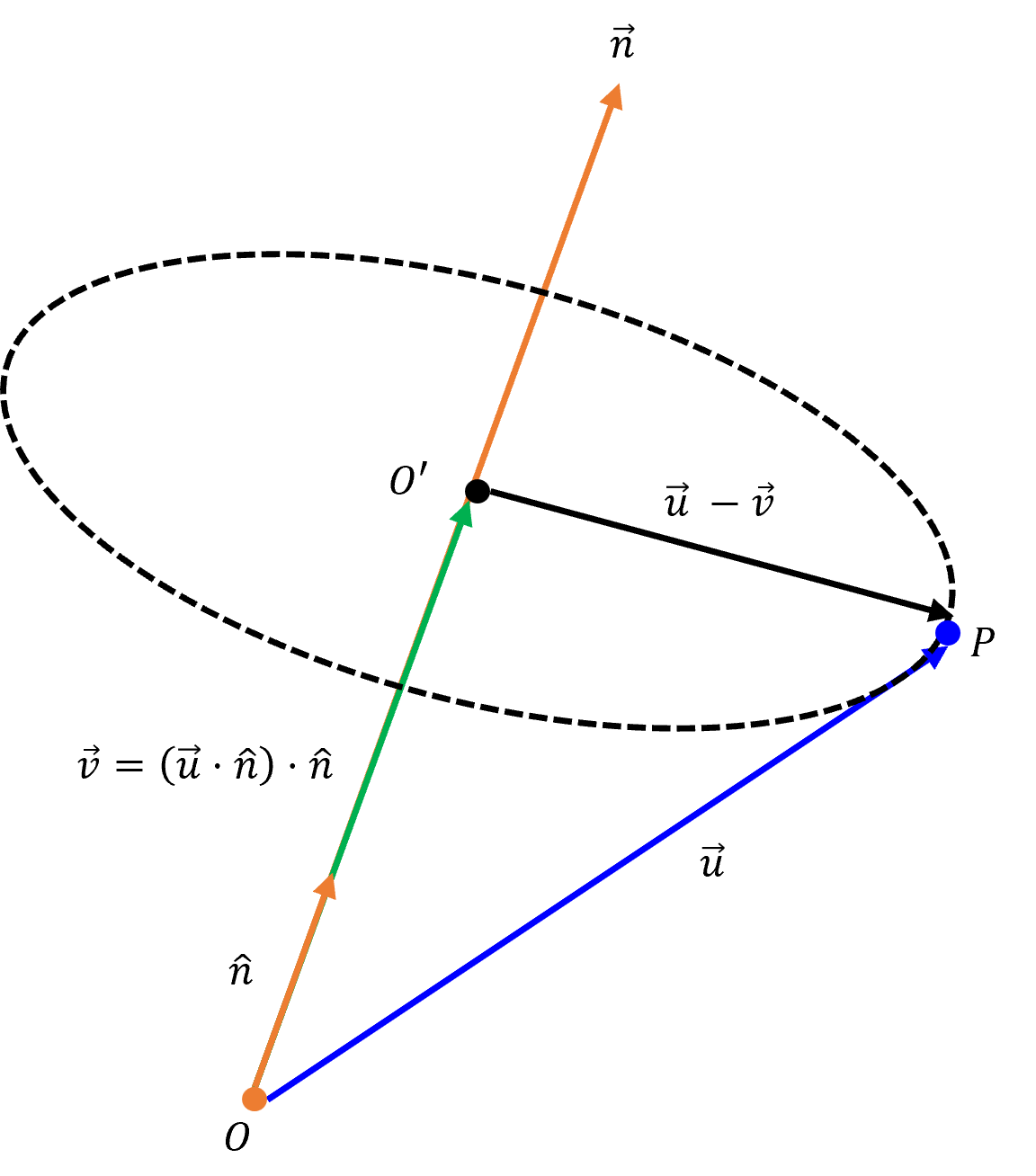
- 먼저 위 그림과 같이 \(O \to P\) 로 향하는 \(\vec{u}\) 를 \(O \to O'\) 로 향하는 \(\vec{v}\) 로 만들기 위하여 다음과 같이 수식을 이용하여 만듭니다.
- \[\vec{OO'} = \vec{v} = (\vec{u} \cdot \hat{n}) \hat{n} \tag{2}\]
- 식 (2)와 같이 전개되는 이유는 아래 링크를 참조하시기 바랍니다.
- vector projection
- 따라서 \(O' \to P\) 로 향하는 벡터는 \(\vec{u}, \vec{v}\) 를 이용하여 \(\vec{u} - \vec{v}\) 와 같이 구할 수 있습니다.
② O’P’ 벡터 구하기
- 앞에서 다룬 회전 평면을 위에서 아래로 내려다 보면서 회전 동작을 살펴보겠습니다.
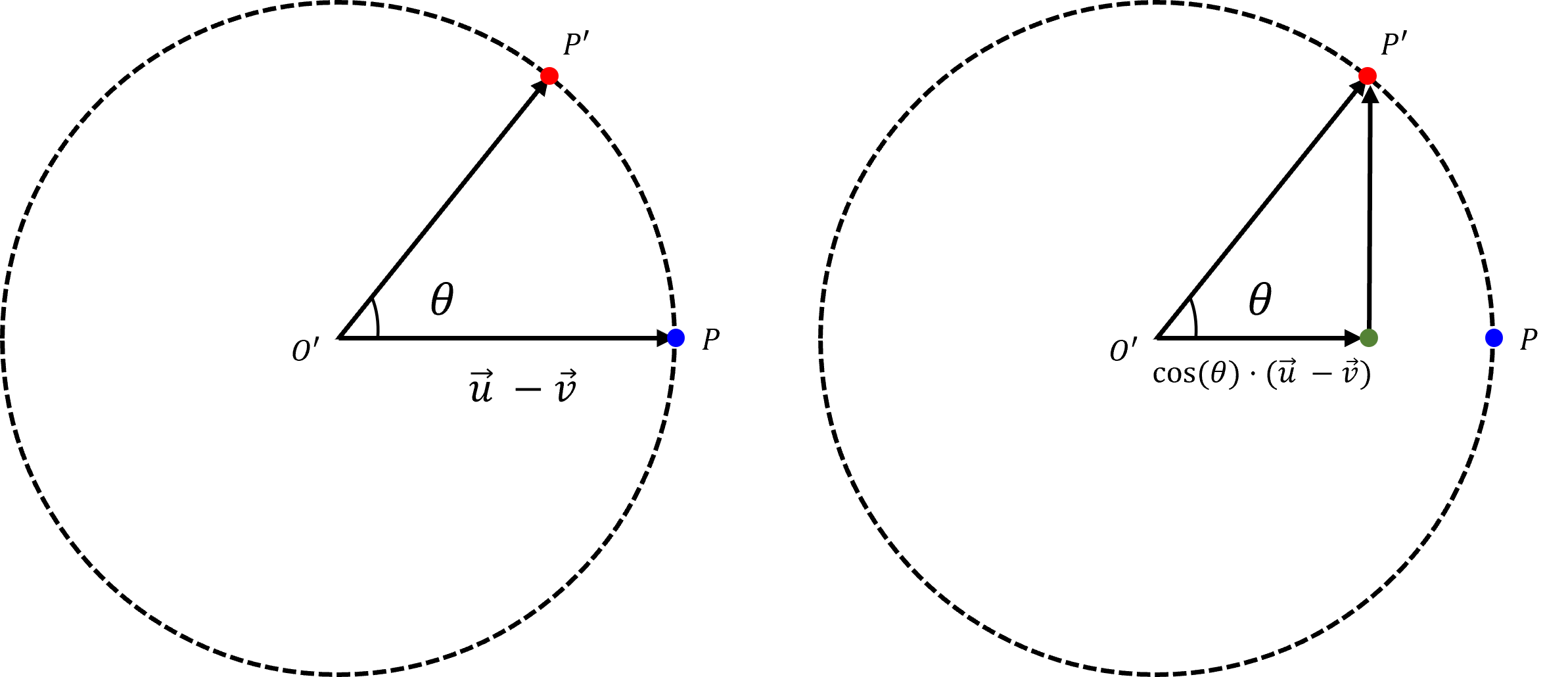
- 위 회전 평면에서 \(\vec{O'P}\) 를 \(\theta\) 만큼 회전 시킨 \(\vec{O'P'}\) 를 구하는 것이 첫번째 목표입니다.
- 먼저 위 그림과 같이 \(\vec{O'P'}\) 의 가로 성분은 \(\cos{(\theta)} (\vec{u} - \vec{v})\) 와 같이 구할 수 있습니다.
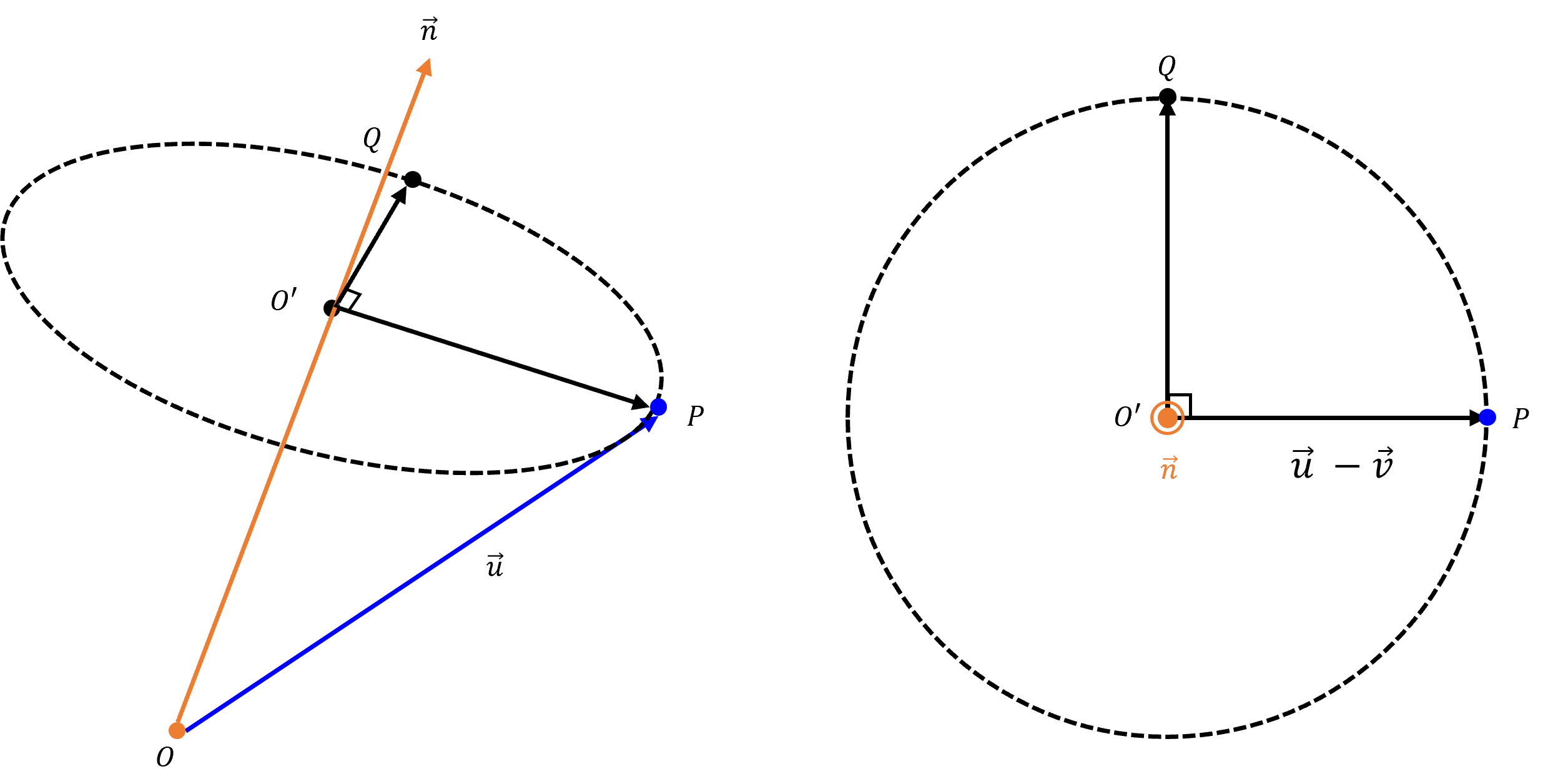
- 위 그림에서 \(\vec{n}\) 과 \(\vec{O'P'}\) 의
cross product를 통해 \(\vec{O'Q}\) 를 구할 수 있습니다. 직교하는 성분이기 때문입니다.
- \[\vec{O'Q} = \hat{n} \times (\vec{u} - \vec{v}) \tag{3}\]
- 지금 까지 확인한 내용을 이용하여 \(\vec{O'Q}\) 의 값을 확인해 보도록 하겠습니다.
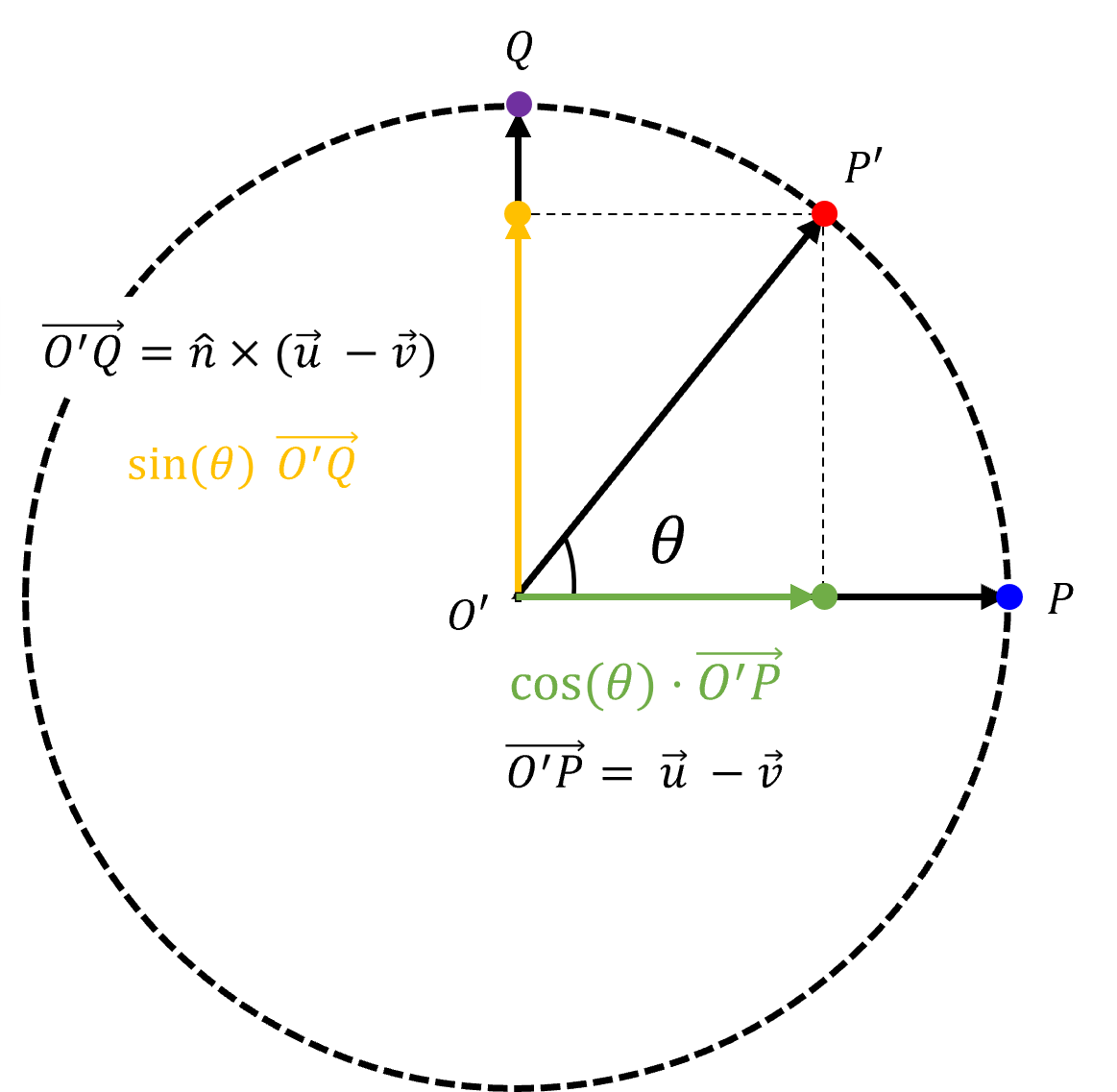
- 위 그림과 같이 수식을 전개하여 \(\vec{O'P'}\) 를 구하면 다음과 같습니다.
- \[\begin{align}\vec{O'P'} &= \cos{(\theta)} \vec{O'P} + \sin{(\theta)} \vec{O'Q} \\ &= \cos{(\theta)} (\vec{u} - \vec{v}) + \sin{(\theta)} (\hat{n} \times (\vec{u} - \vec{v})) \\ &= \cos{(\theta)} (\vec{u} - \vec{v}) + \sin{(\theta)} (\hat{n} \times \vec{u} - \hat{n} \times \vec{v}) \\ &= \cos{(\theta)} (\vec{u} - \vec{v}) + \sin{(\theta)} (\hat{n} \times \vec{u}) \end{align} \tag{4}\]
- 위 식에서 마지막의 \(\hat{n} \times \vec{u}\) 가 소거된 이유는 두 벡터가 평행하기 때문에 cross product가 0이 되어서 소거하였습니다.
- 따라서 식을 정리하면 다음과 같습니다.
- \[\vec{O'P'} = \cos{(\theta)} (\vec{u} - \vec{v}) + \sin{(\theta)} (\hat{n} \times \vec{u}) \tag{5}\]
③ OP’ 벡터 구하기
- 식 (2)의 벡터 \(\vec{OO'}\) 와 식 (5)의 벡터 \(\vec{O'P'}\) 를 더하면 최종적으로 구하고자 하는 벡터 \(\vec{OP'}\) 를 구할 수 있습니다.
- \[\vec{OP'} = \vec{v} + \cos{(\theta)} (\vec{u} - \vec{v}) + \sin{(\theta)} (\hat{n} \times \vec{u}) \tag{6}\]
- 마지막으로 \(\vec{v} = (\vec{u} \cdot \hat{n}) \hat{n}\) 를 대입하면 최종적으로 다음과 같습니다.
- \[\vec{OP'} = \vec{u'} = \cos{(\theta)} \vec{u} + (1 - \cos{(\theta)})(\vec{u} \cdot \hat{n}) \hat{n} + \sin{(\theta)} (\hat{n} \times \vec{u}) \tag{7}\]
- 위 수식의 의미를 다시 살펴보면 입력으로 들어오는 벡터는 \(\vec{u}\) 이며 회전할 때 사용되는 값이 \(\hat{n}\) 과 \(\theta\) 입니다. 즉, \(\hat{n}\) 과 \(\theta\) 에 따라서 \(\vec{u} \to \vec{u'}\) 가 되는 식으로 이해할 수 있습니다.
- 지금까지가
Axis-Angle Rotation을 수식적으로 살펴보았습니다. 이와 같은 회전 방식을 고안해 낸 로드리게스의 이름을 따서 로드리게스 회전 이라고도 부릅니다.
Axis-Angle Rotation의 행렬식 표현
- 지금까지 살펴본 공식을 통하여 3차원 공간에서 어떻게 임의의 축을 회전하여 3차원 회전하는 지 살펴보았습니다.
- 이번에는
Axis-Angle Rotation을 행렬로 나타내는 방법에 대하여 다루어 보도록 하겠습니다.
Axis-Angle Rotation을 행렬로 나타내기 위해서는 앞에서 다룬 식 (7)을 조금 변형해야 합니다.
- \[(\vec{u} \cdot \hat{n}) \hat{n} \to (\hat{n} \otimes \hat{n}^{T}) \cdot \vec{u} \tag{8}\]
- 먼저 식 (7)의 \((\vec{u} \cdot \hat{n}) \hat{n}\) 부분을 위 식과 같이 변형하여 \(\vec{u}\) 를 빼낼 수 있도록 만듭니다.
- 식 (8)의 우변의 \(\otimes\) 는
outer product를 의미합니다. 좌/우변이 같음은 아래 결과를 참조하시면 됩니다.
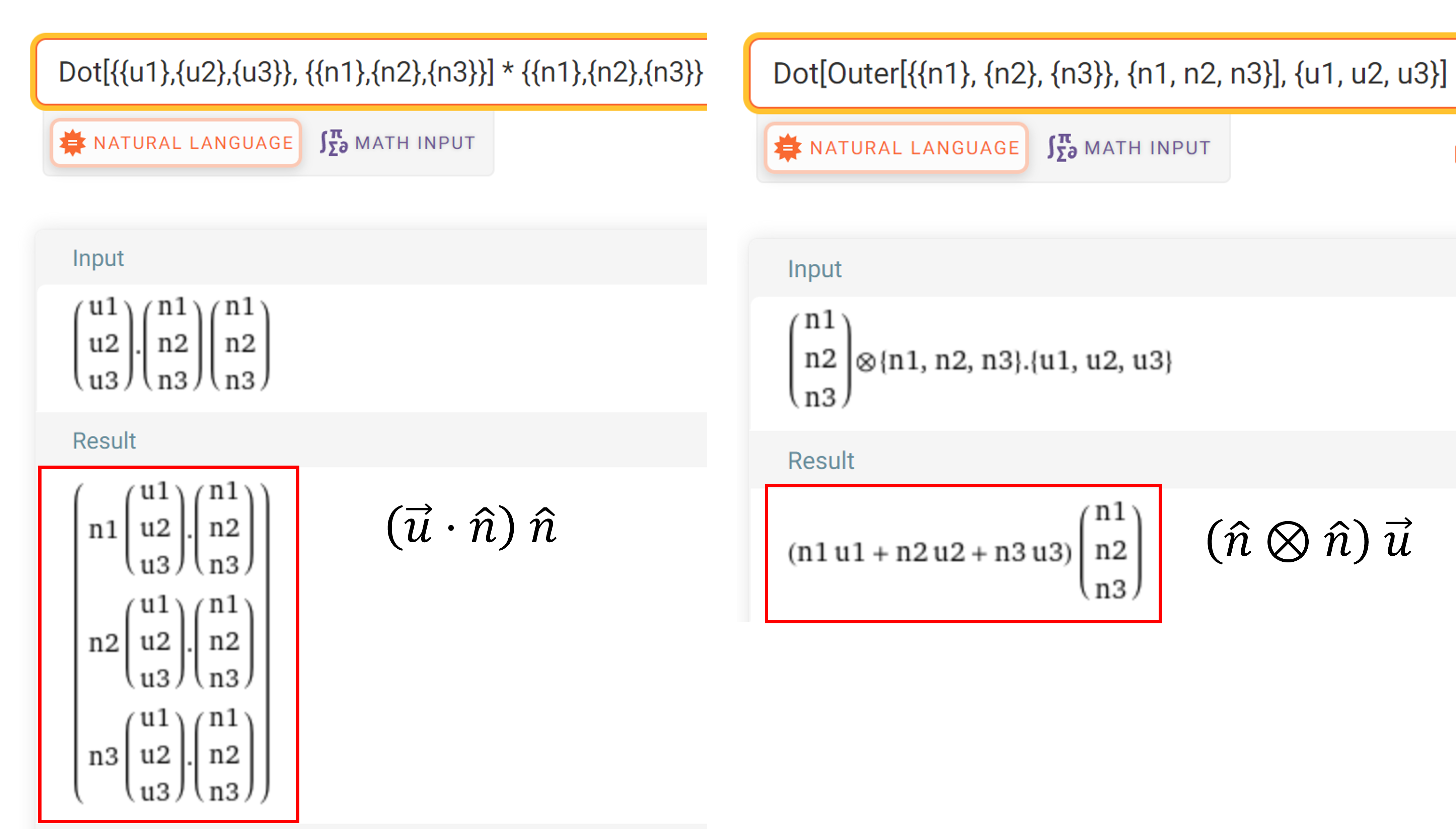
- 따라서 식 (7)은 다음과 같이 다시 정리하여 쓸 수 있습니다.
- \[\vec{u'} = \cos{(\theta)} \vec{u} + (1 - \cos{(\theta)})(\hat{n} \otimes \hat{n}^{T}) \cdot \vec{u} + \sin{(\theta)} (\hat{n} \times \vec{u}) \tag{9}\]
cross product또한 행렬식으로 나타낼 수 있습니다.
- \[\hat{n} = \begin{bmatrix} \hat{n}_{x} & \hat{n}_{y} & \hat{n}_{z} \end{bmatrix}\]
- \[\vec{u} = \begin{bmatrix} u_{x} & u_{y} & u_{z} \end{bmatrix}\]
- 위 식과 같이 \(\hat{n}, \vec{u}\) 를 정의하면 다음과 같이
cross product를 위한 행렬 식을 설정할 수 있습니다.
- \[\hat{n} \times \vec{u} = \begin{bmatrix} \hat{n}_{y}u_{z} - \hat{n}_{z}u_{y} \\ \hat{n}_{z}u_{x} - \hat{n}_{x}u_{z} \\ \hat{n}_{x}u_{y} - \hat{n}_{y}u_{x} \end{bmatrix} = \begin{bmatrix} 0 & -\hat{n}_{z} & \hat{n}_{y} \\ \hat{n}_{z} & 0 & -\hat{n}_{x} \\ -\hat{n}_{y} & \hat{n}_{x} & 0 \end{bmatrix} \begin{bmatrix} u_{x} \\ u_{y} \\ u_{z} \end{bmatrix} \tag{10}\]
- 식 (10) 에서 \(\hat{n}\) 으로 이루어진 행렬을 다음과 같이 \(K\) 로 정의해 보겠습니다.
- \[K = \begin{bmatrix} 0 & -\hat{n}_{z} & \hat{n}_{y} \\ \hat{n}_{z} & 0 & -\hat{n}_{x} \\ -\hat{n}_{y} & \hat{n}_{x} & 0 \end{bmatrix}\]
- \[\hat{n} \times \vec{u} = K\vec{u} \tag{11}\]
- 이 때, \(K^{2}\) 을 구해보면 다음과 같습니다.
- \[K^{2} = \begin{bmatrix} 0 & -\hat{n}_{z} & \hat{n}_{y} \\ \hat{n}_{z} & 0 & -\hat{n}_{x} \\ -\hat{n}_{y} & \hat{n}_{x} & 0 \end{bmatrix} \begin{bmatrix} 0 & -\hat{n}_{z} & \hat{n}_{y} \\ \hat{n}_{z} & 0 & -\hat{n}_{x} \\ -\hat{n}_{y} & \hat{n}_{x} & 0 \end{bmatrix} = \begin{bmatrix} -\hat{n}_{z}^{2}-\hat{n}_{y}^{2} & \hat{n}_{x}\hat{n}_{y} & \hat{n}_{z}\hat{n}_{x} \\ \hat{n}_{x}\hat{n}_{y} & -\hat{n}_{z}^{2}-\hat{n}_{x}^{2} & \hat{n}_{y}\hat{n}_{z} \\ \hat{n}_{x}\hat{n}_{z} & \hat{n}_{y}\hat{n}_{z} & -\hat{n}_{x}^{2}-\hat{n}_{y}^{2} \end{bmatrix} \tag{12}\]
- 여기서 \(\hat{n}\) 의
norm의 정의에 따라 \(\hat{n}_{x}^{2} + \hat{n}_{y}^{2} + \hat{n}_{z}^{2} = 1\) 을 만족하므로 식 (12)의 우변을 다음과 같이 정리할 수 있습니다.
- \[\begin{bmatrix} -\hat{n}_{z}^{2}-\hat{n}_{y}^{2} & \hat{n}_{x}\hat{n}_{y} & \hat{n}_{z}\hat{n}_{x} \\ \hat{n}_{x}\hat{n}_{y} & -\hat{n}_{z}^{2}-\hat{n}_{x}^{2} & \hat{n}_{y}\hat{n}_{z} \\ \hat{n}_{x}\hat{n}_{z} & \hat{n}_{y}\hat{n}_{z} & -\hat{n}_{x}^{2}-\hat{n}_{y}^{2} \end{bmatrix} = \begin{bmatrix} \hat{n}_{x}^{2} - 1 & \hat{n}_{x}\hat{n}_{y} & \hat{n}_{z}\hat{n}_{x} \\ \hat{n}_{x}\hat{n}_{y} & \hat{n}_{y}^{2} - 1 & \hat{n}_{y}\hat{n}_{z} \\ \hat{n}_{x}\hat{n}_{z} & \hat{n}_{y}\hat{n}_{z} & \hat{n}_{z}^{2} - 1 \end{bmatrix} = \hat{n} \otimes \hat{n}^{T} - I \tag{13}\]
- \[K^{2} = \hat{n} \otimes \hat{n}^{T} - I \tag{14}\]
- \[\hat{n} \otimes \hat{n}^{T} = K^{2} + I \tag{15}\]
- 식 (11)과 식 (15)를 이용하여 식 (9)를 전개해 보도록 하겠습니다.
- \[\begin{align} \vec{u'} &= \cos{(\theta)} \vec{u} + (1 - \cos{(\theta)})(\hat{n} \otimes \hat{n}^{T}) \cdot \vec{u} + \sin{(\theta)} (\hat{n} \times \vec{u}) \\ &= \cos{(\theta)} \vec{u} + (1 - \cos{(\theta)})(K^{2} + I)\vec{u} + \sin{(\theta)}K\vec{u} \\ &= (\cos{(\theta)}I + (1 - \cos{(\theta)})(K^{2} + I) + \sin{(\theta)}K)\vec{u} \\ &= R \vec{u} \end{align} \tag{16}\]
- \[\begin{align} R &= \cos{(\theta)}I + (1 - \cos{(\theta)})(K^{2} + I) + \sin{(\theta)}K \\ &= \cos{(\theta)}\begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} + (1 - \cos{(\theta)})\begin{bmatrix} \hat{n}_{x}^{2} & \hat{n}_{x}\hat{n}_{y} & \hat{n}_{z}\hat{n}_{x} \\ \hat{n}_{x}\hat{n}_{y} & \hat{n}_{y}^{2} & \hat{n}_{y}\hat{n}_{z} \\ \hat{n}_{x}\hat{n}_{z} & \hat{n}_{y}\hat{n}_{z} & \hat{n}_{z}^{2} \end{bmatrix} + \sin{(\theta)}\begin{bmatrix} 0 & -\hat{n}_{z} & \hat{n}_{y} \\ \hat{n}_{z} & 0 & -\hat{n}_{x} \\ -\hat{n}_{y} & \hat{n}_{x} & 0 \end{bmatrix} \end{align} \tag{17}\]
- \[c : \cos{(\theta)}\]
- \[s : \sin{(\theta)}\]
- \[t : 1 - \cos{(\theta)}\]
- \[R = \begin{bmatrix} t\hat{n}_{x}^{2} + c & t\hat{n}_{x}\hat{n}_{y} -s\hat{n}_{z} & t\hat{n}_{z}\hat{n}_{x} + s\hat{n}_{y} \\ t\hat{n}_{x}\hat{n}_{y} + s\hat{n}_{z} & t\hat{n}_{y}^{2} + c & t\hat{n}_{y}\hat{n}_{z} - s\hat{n}_{x} \\ t\hat{n}_{x}\hat{n}_{z} -s\hat{n}_{y} & t\hat{n}_{y}\hat{n}_{z} + s\hat{n}_{x}& t\hat{n}_{z}^{2} + c \end{bmatrix} \tag{18}\]
- 풀어서 식을 쓰면 다음 식과 같습니다.
- \[R = \begin{bmatrix} (1 - \cos{(\theta)})\hat{n}_{x}^{2} + \cos{(\theta)} & (1 - \cos{(\theta)})\hat{n}_{x}\hat{n}_{y} -\sin{(\theta)}\hat{n}_{z} & (1 - \cos{(\theta)})\hat{n}_{z}\hat{n}_{x} + \sin{(\theta)}\hat{n}_{y} \\ (1 - \cos{(\theta)})\hat{n}_{x}\hat{n}_{y} + \sin{(\theta)}\hat{n}_{z} & (1 - \cos{(\theta)})\hat{n}_{y}^{2} + \cos{(\theta)} & (1 - \cos{(\theta)})\hat{n}_{y}\hat{n}_{z} - \sin{(\theta)}\hat{n}_{x} \\ (1 - \cos{(\theta)})\hat{n}_{x}\hat{n}_{z} -\sin{(\theta)}\hat{n}_{y} & (1 - \cos{(\theta)})\hat{n}_{y}\hat{n}_{z} + \sin{(\theta)}\hat{n}_{x}& (1 - \cos{(\theta)})\hat{n}_{z}^{2} + \cos{(\theta)} \end{bmatrix} \tag{19}\]
Axis-Angle Rotation의 Python code
- 앞에서 다룬 내용을 이용하여
rotation행렬을axis-angle rotation으로 구현 방법은 다음과 같습니다.
def rot_from_axisangle(axis, theta):
axis = axis/np.linalg.norm(axis)
c = np.cos(theta)
s = np.sin(theta)
t = 1 - c
x = axis[0]
y = axis[1]
z = axis[2]
rot = np.zeros((3, 3))
rot[0, 0] = t * x * x + c
rot[0, 1] = t * x * y - s * z
rot[0, 2] = t * z * x + s * y
rot[1, 0] = t * x * y + s * z
rot[1, 1] = t * y * y + c
rot[1, 2] = t * y * z - s * x
rot[2, 0] = t * z * x - y * x
rot[2, 1] = t * y * z + y * x
rot[2, 2] = t * z * z + c
return rot
- 위 코드를 3D Rotation Converter 예제를 이용하여 살펴보면 다음과 같습니다.
- 예를 들어 X, Y, Z 방향으로 각각 30도 회전한 경우를 살펴보도록 하겠습니다.
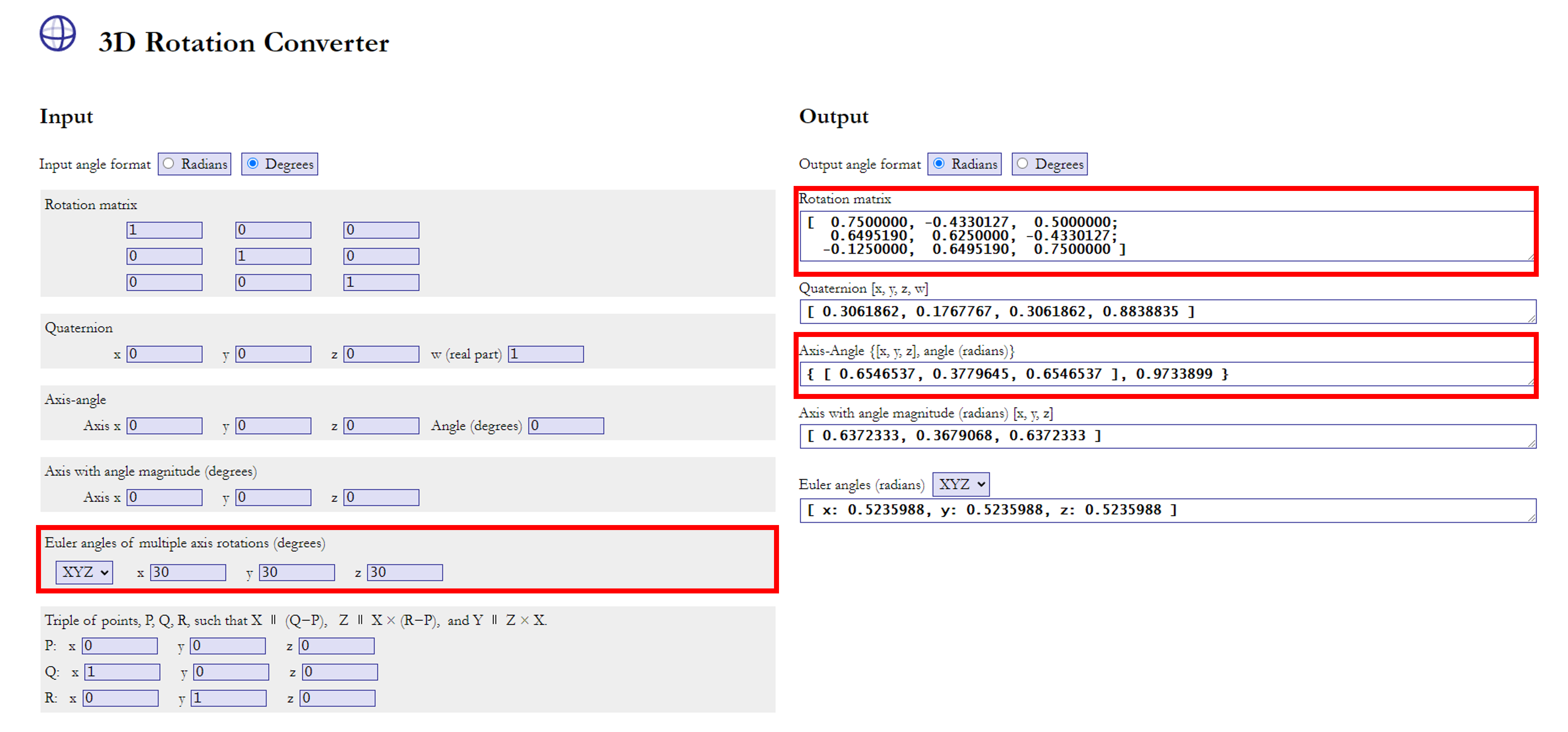
- 우측 Output에서의
Rotation matrix가 그 결과임을 알 수 있으며 이 때,Axis-Angle의 값 또한 알 수 있습니다. - 위에 정의된 Python 코드를 이용하여
Axis-Angle을 구해보면 다음과 같습니다.
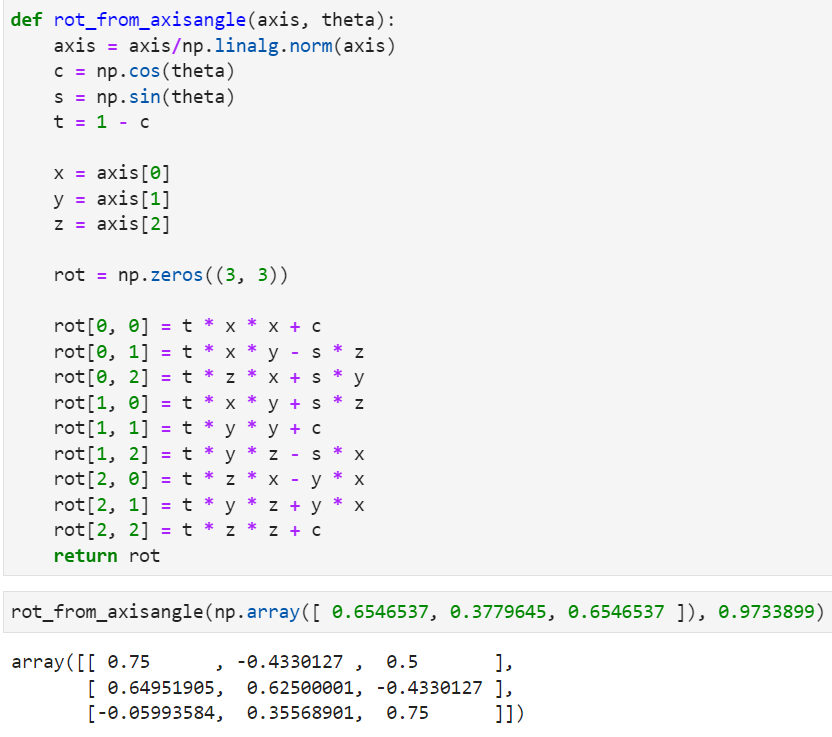
- 위 코드의
Rotation matrix의 결과 또한 같은 값임을 알 수 있습니다. 즉,Euler Angle Rotation이나Axis-Angle Rotation이나 표현 방식이 다를 뿐 3차원 공간 상의 회전은 같음을 알 수 있습니다.
Axis-Angle Rotation의 단점
Axis-Angle Rotation은Euler Angle Rotation의 2가지 문제 (Gimbal Lock,Rotaional Interpolation)를 해결하는 좋은 방법입니다. 하지만Axis-Angle Rotation에서도 나타나는 몇가지 약점들이 있습니다.- 먼저
연산량이 많다는 점입니다. 3D 회전이 많이 필요한 경우에 계속 누적된Axis-Angle Rotation은 다른 Rotation 방법에 비해 상대적으로 연산량을 더 필요로 합니다. - 그리고
Axis-Angle Rotation에서 회전 \(\theta\) 가 0인 경우와 \(2\pi\) 인 경우가 같다는 모호한 점도 있습니다. - 마지막으로 회전이 계속 중첩되는
concatenation에서는 위 코드에서 다룬 바와 같이Axis-Angle Rotation을 다른 형태의 행렬로 변환해서 사용해야 합니다. 즉, 단순히 수식으로만 사용하기에는 어려움이 있습니다.
Euler Angle Rotation문제 뿐 아니라Axis-Angle Rotation문제도 해결하는 좋은 방법이 바로quaternion입니다.quaternion은 다른 3차원 회전 방법에 대비하여 직관적이지 않다는 단점이 있지만 개념을 학습하고 익숙해져서 잘 사용하기만 하면 다른 회전 방법에서 발생하는 문제를 모두 개선할 수 있습니다.- 아래 링크에서
quaternion의 개념을 익혀보시는 것을 추천 드립니다.