(멀티플 뷰 지오메트리) Lecture 3. Circular points and Absolute conic
2022, Apr 20
- 참조 : https://youtu.be/T-p6d7av32Y?list=PLxg0CGqViygP47ERvqHw_v7FVnUovJeaz
- 참조 : https://youtu.be/tsO6VO1s_x8?list=PLxg0CGqViygP47ERvqHw_v7FVnUovJeaz
- 참조 : https://youtu.be/k63Bi74Meyc?list=PLxg0CGqViygP47ERvqHw_v7FVnUovJeaz
- 참조 : Multiple View Geometry in Computer Vision
- 이번 글에서는 Circular points and Absolute conic 내용의 강의를 듣고 정리해 보도록 하겠습니다.
- 이번 강의에서는 크게 위 3가지 내용을 배울 예정입니다.
- ①
line at infinity와circular points개념을 배우고 이 개념을 이용하여affine또는projective distortion을 제거하는 방법에 대하여 배워보도록 하겠습니다. - ② 개념을 확장하여
plane at infinity를 배우고affine transformation에서 불변한 성질에 대하여 배워보도록 하곘습니다. - ③
absolute conic과absolute dual quadrics를 배우고similarity transformation에서 불변한 성질에 대하여 배워보도록 하겠습니다.
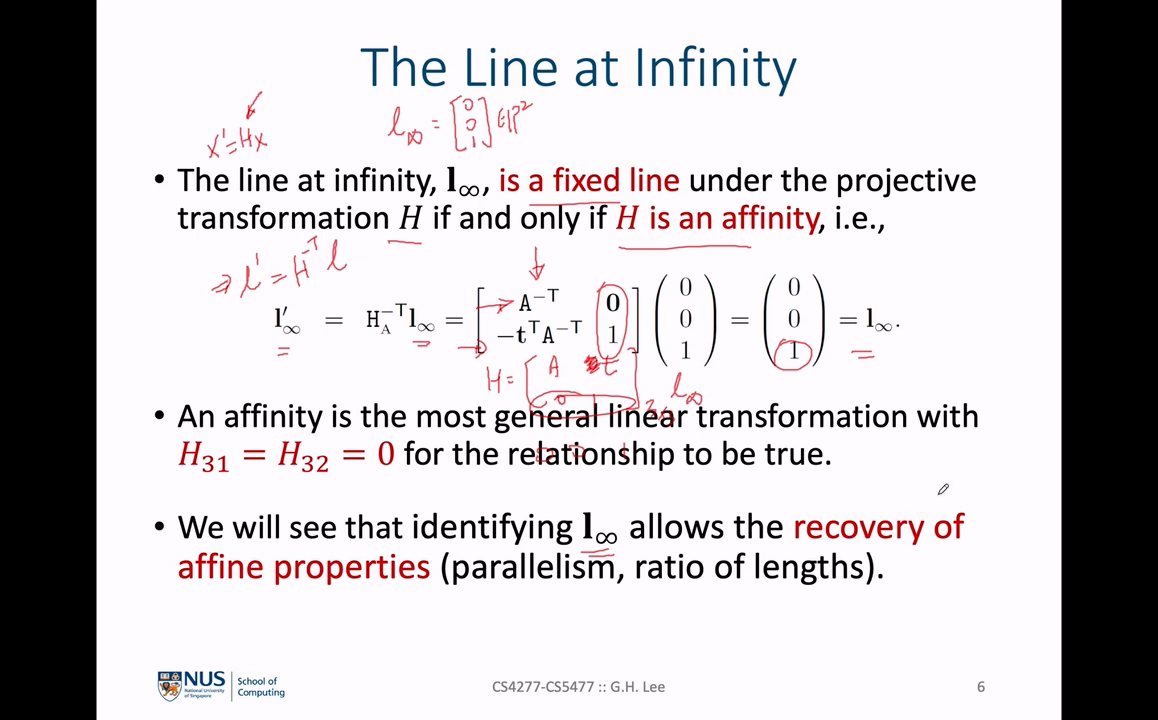
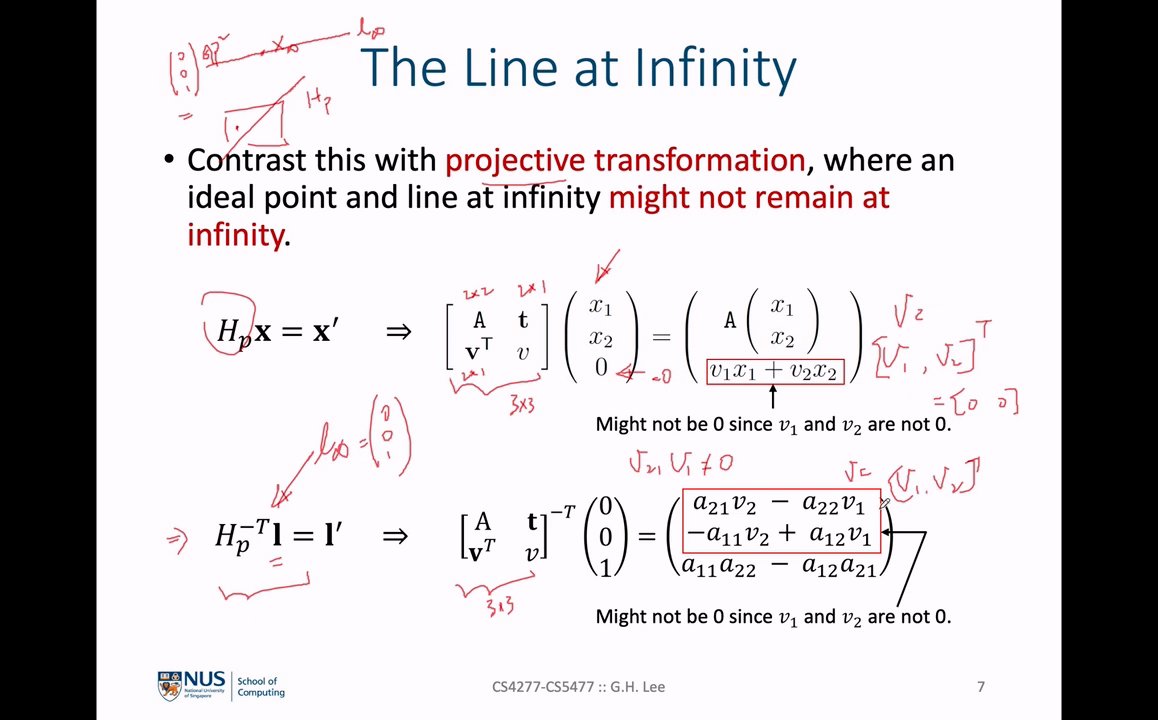
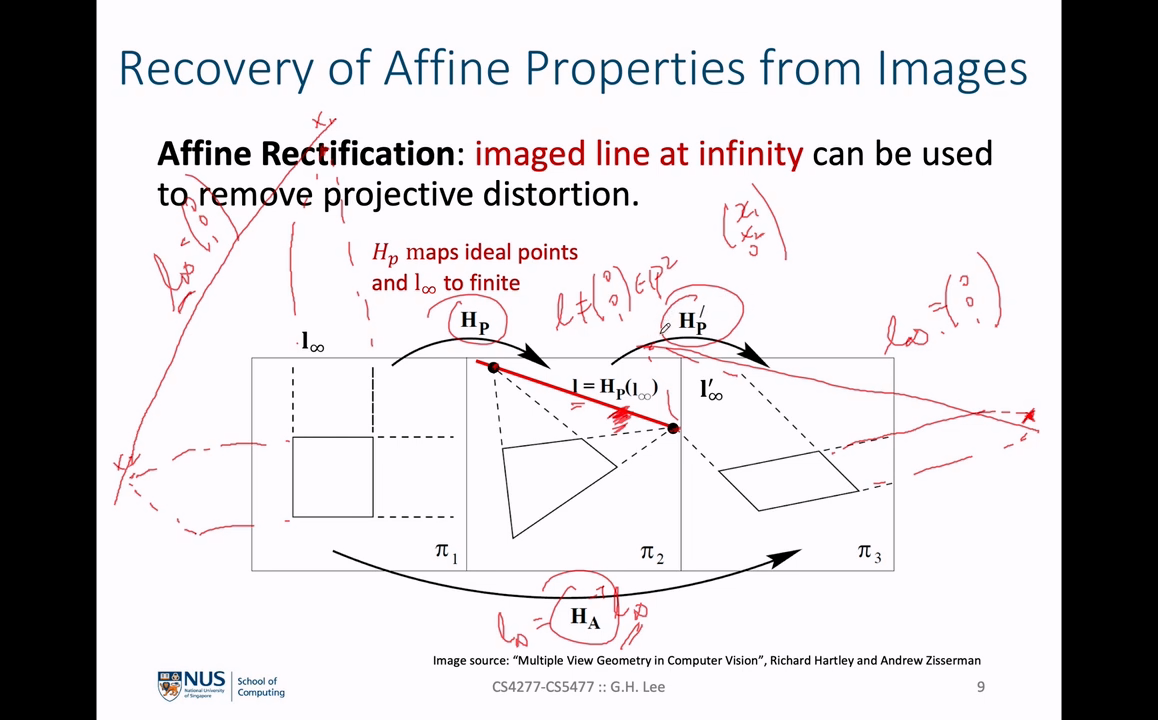
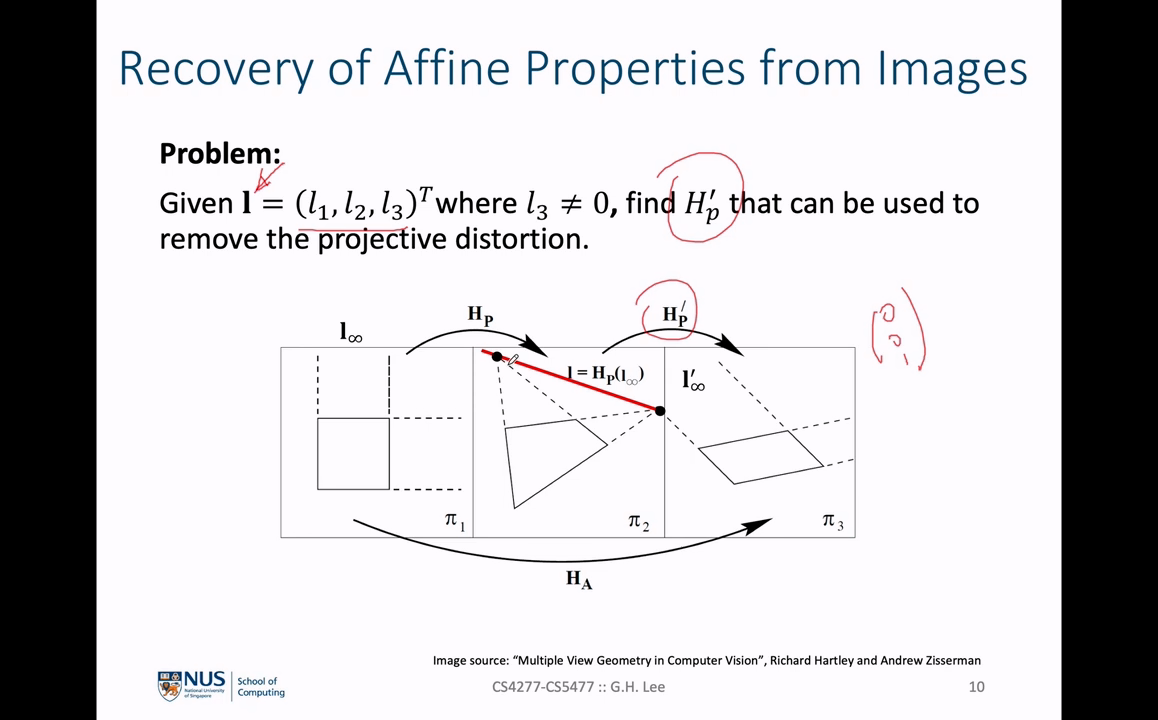
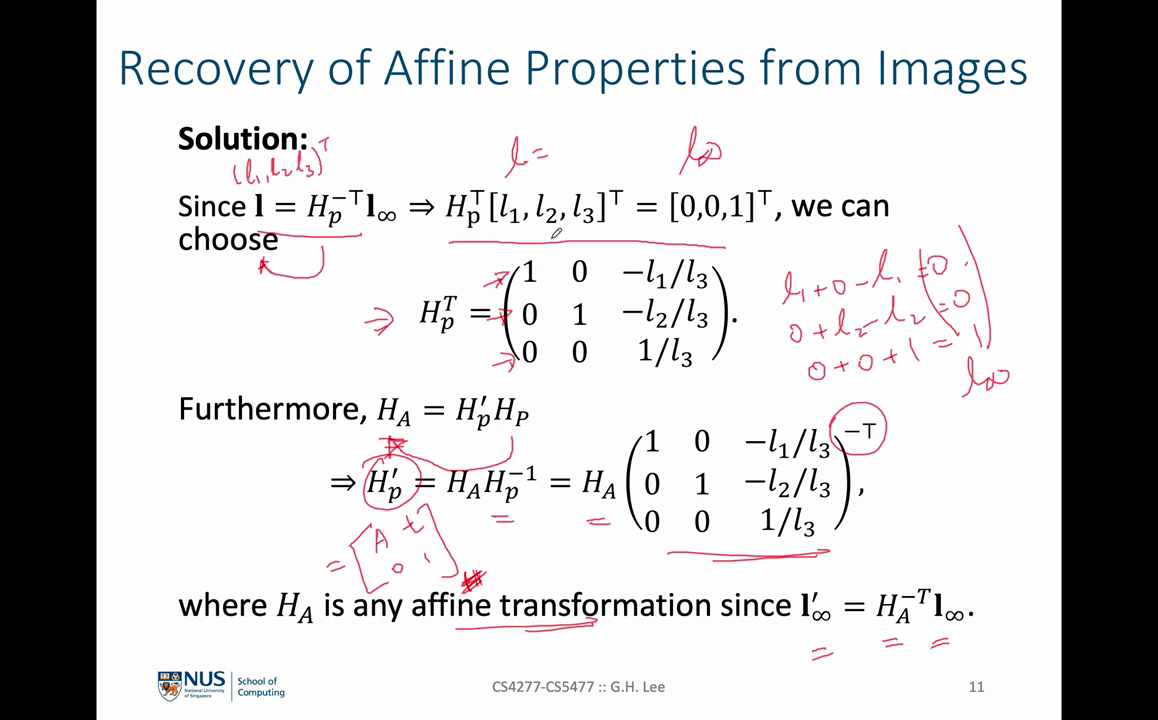
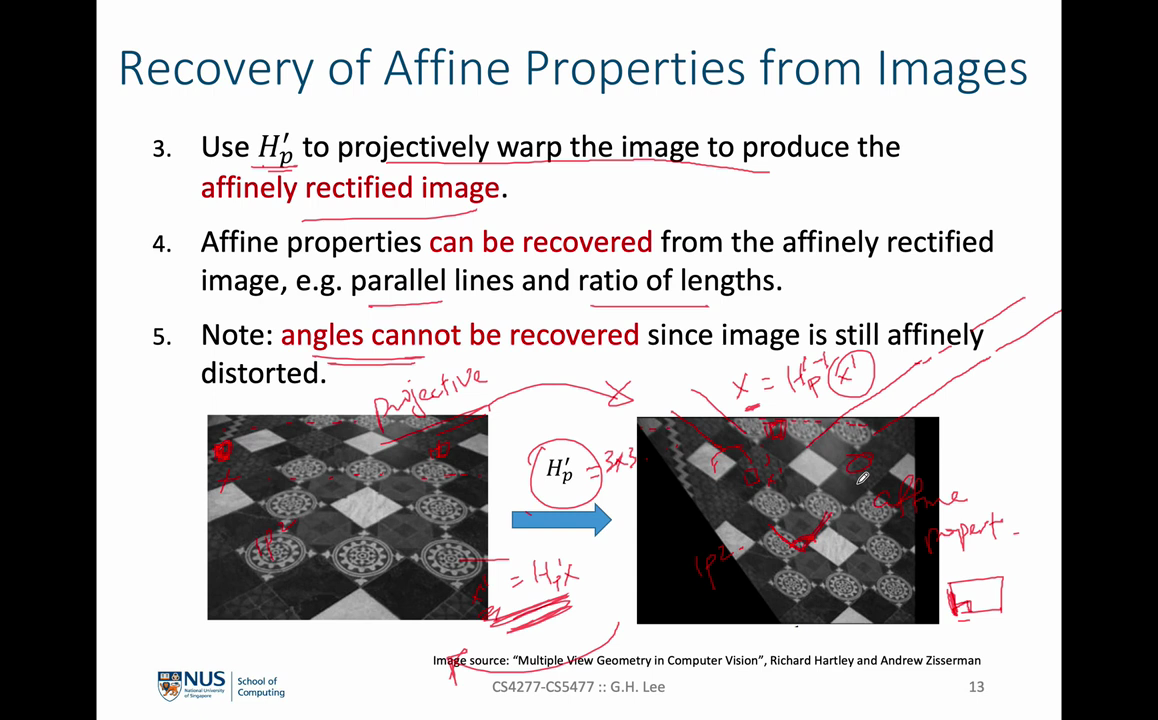
Recovery of Affine Properties from Images
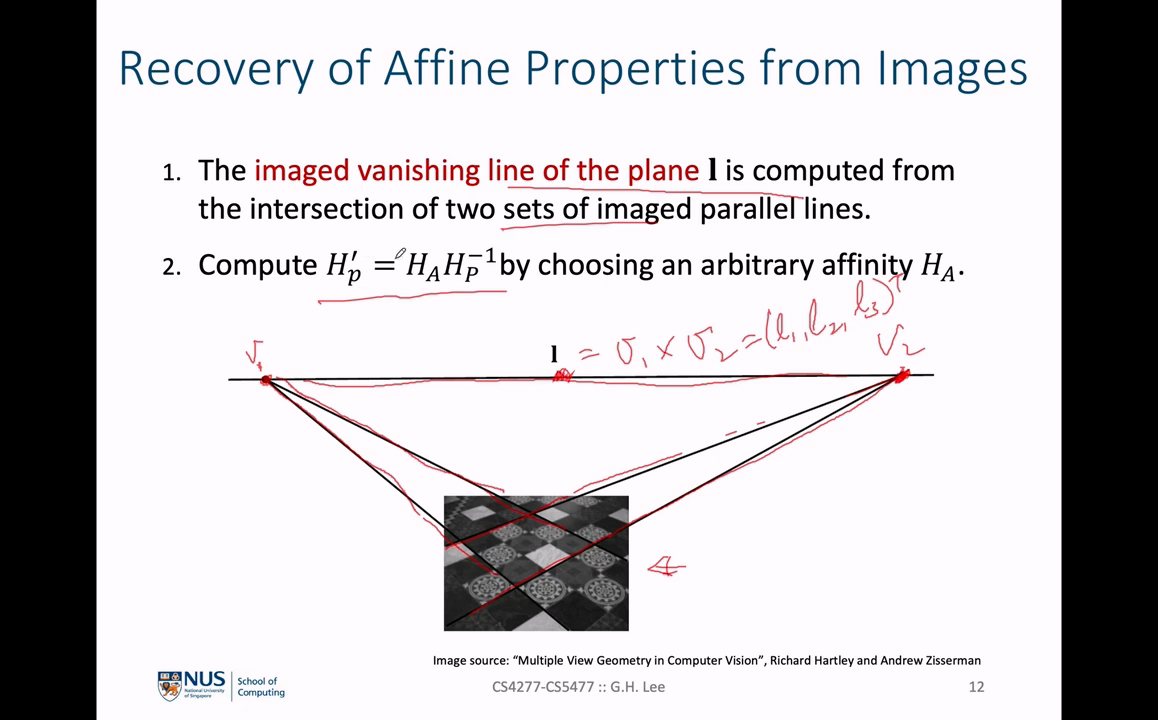
- 위 슬라이드에서 \(v_{1}, v_{2}\) 2개의 점의
cross product를 이용하여 \(l\) 을 구하는 방법은 다음과 같습니다.

- 위 그림과 같은 선 \(l\), \(v_{1}, v_{2}\) 점의 관계에서 두 점이 선 \(l\) 위에 있으므로 아래 식을 만족합니다.
- \[l \cdot v_{1} = 0\]
- \[l \cdot v_{2} = 0\]
- 벡터 \((a, b, c)\) 는 \((x_{1}, y_{1}, z_{1})\) 과 \((x_{2}, y_{2}, z_{2})\) 에 모두 수직인 벡터입니다. 따라서 \(v_{1}\) 과 \(v_{2}\) 모두에 수직인 벡터를 구하는 방법이
cross product이므로 다음과 같이 \(l\) 을 구할 수 있습니다.
- \[l = v_{1} \times v_{2}\]
Computing a Vanishing Point from a Length Ratio
- 이번에는
Vanishing Point를 어떻게 계산하는 지 살펴보도록 하겠습니다.
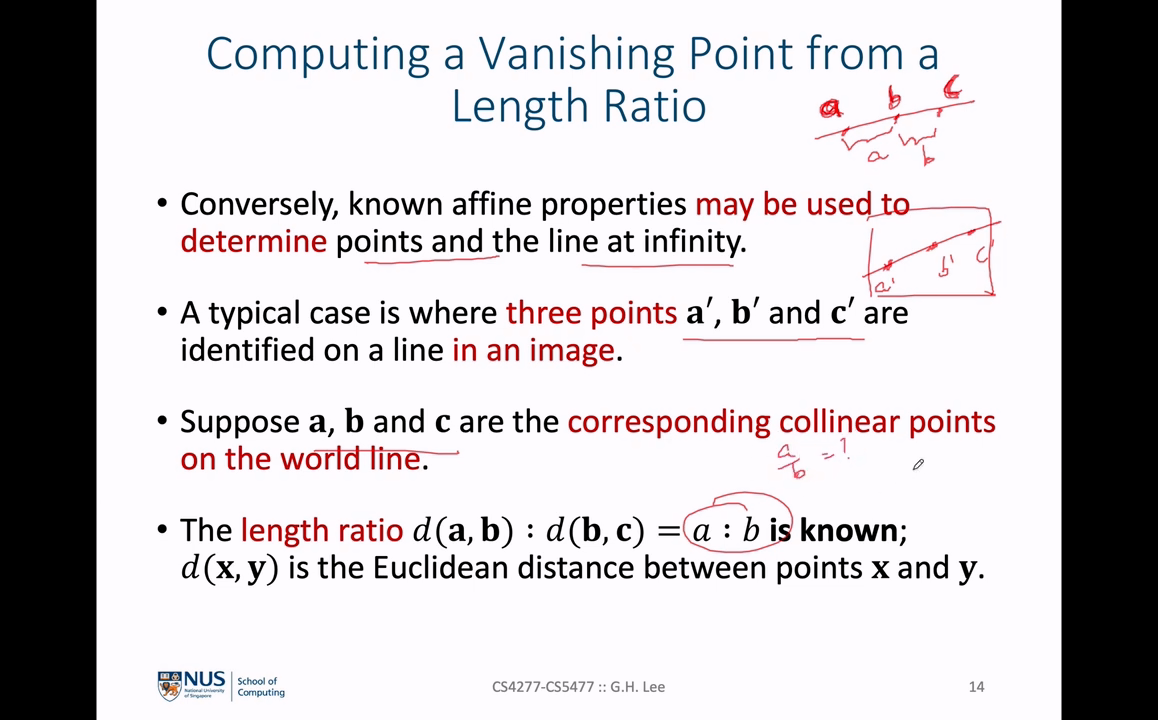
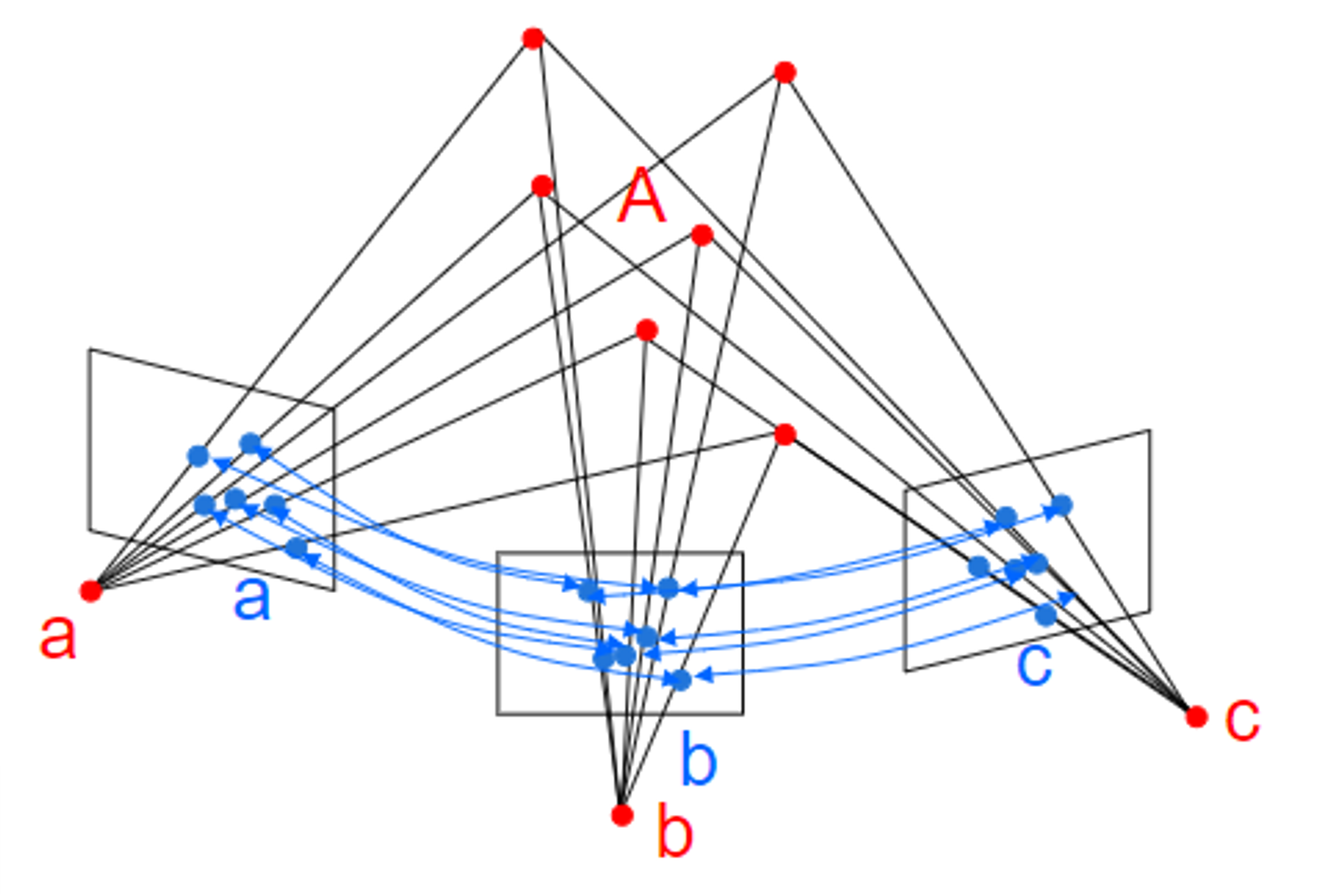
- vanishing point를 계산하기 위하여 이미지 상에서 동일선(
collinear) 상에 있는 점들 \(a, b, c\) 를 가정하겠습니다. 상세 내용은 다음 슬라이드에서 설명하겠습니다.
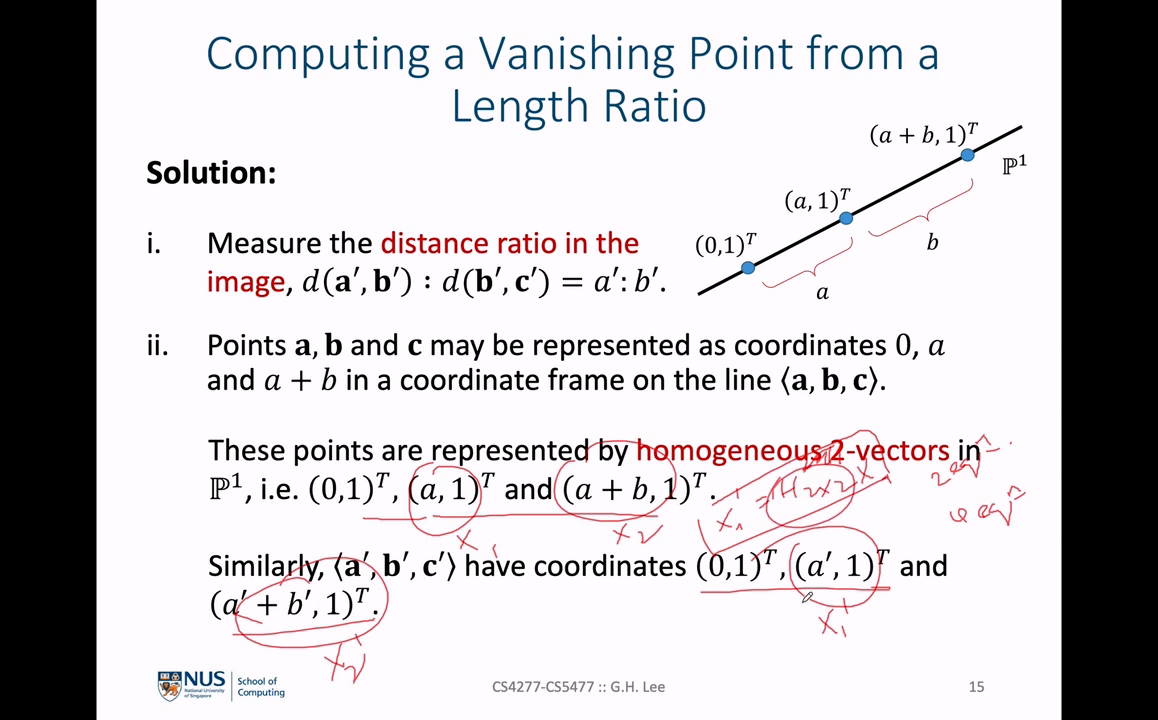
- 위 그림과 같이 1차원 선 \(\mathbb{P}^{1}\) 상에서 \(a = (0, 1)^{T}, b = (a, 1)^{T}, c = (a + b, 1)^{T}\) 를 나타내며 그 사이의 거리는 각각 \(a, b\) 가 됩니다.
- 이와 같은 방식으로 정한 점 \(a, b, c\) 를
Perspective성질이 포함된 이미지 (실제 촬영된 이미지)와Perspective성질이 제거된 이미지 각각에서 점을 구해볼 수 있습니다.
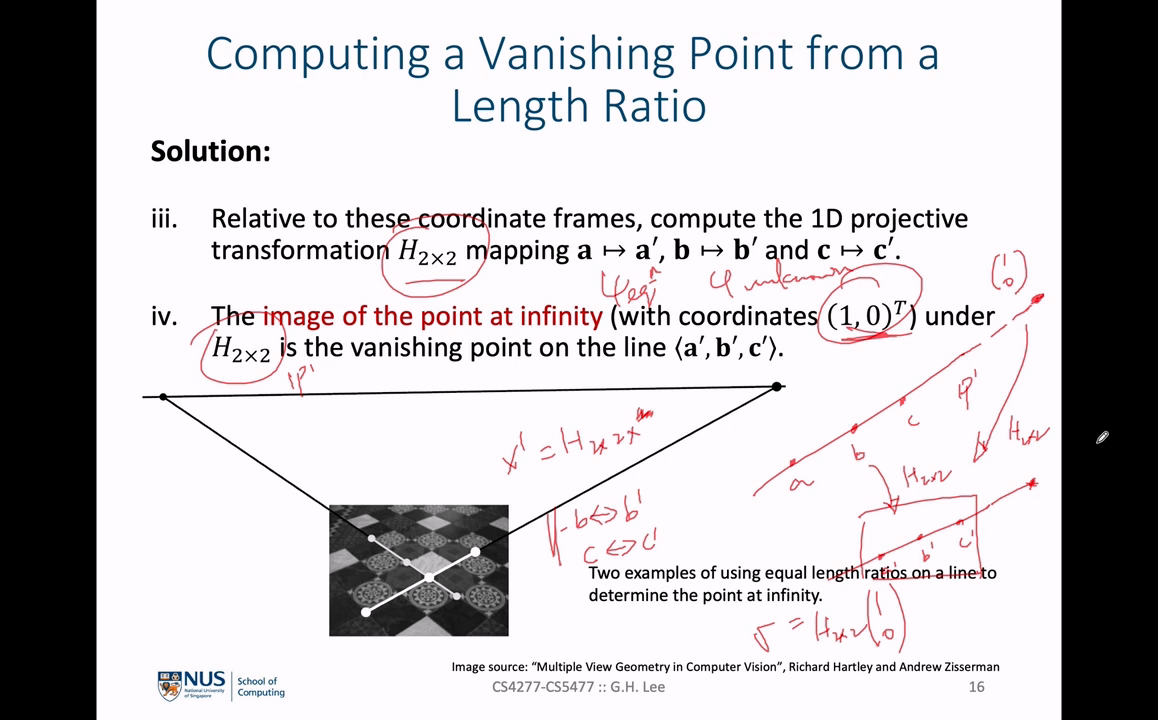
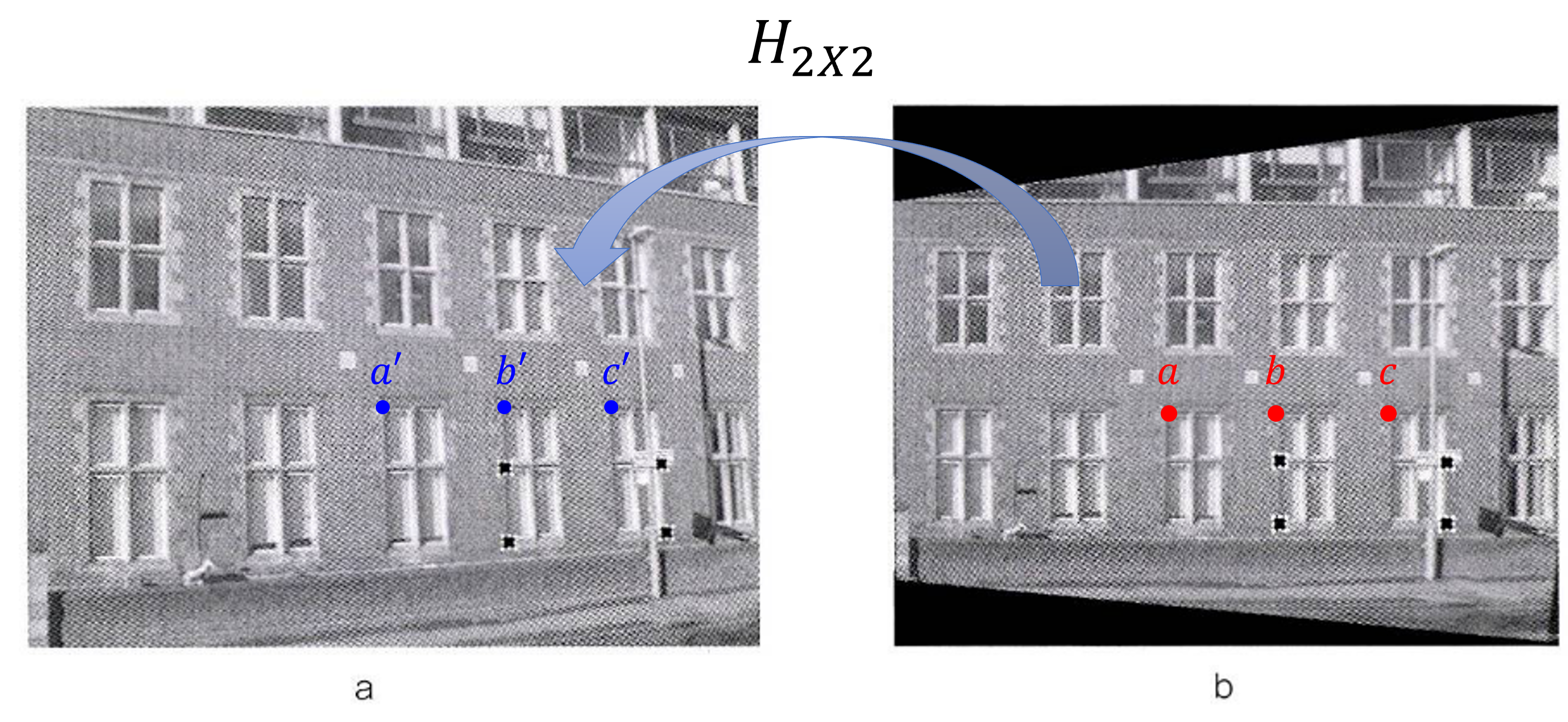
Vanishing Point를 찾기 위하여 Perspective 성질이 제거된 오른쪽 이미지에서 왼쪽 이미지로 같은 선상의 점들의 이동 관계를 나타내는 \(H_{2\times2}\) 행렬을 찾습니다. 그러면 \(a \to a', b \to b' , c \to c'\) 로 변환할 수 있습니다.- 마지막으로 구하고자 하는 소실점은 오른쪽의 이미지에서는
point at infinity인 \((1, 0)\) 에 존재합니다. 이 점을 왼쪽의 perspective 왜곡이 적용된 이미지로 반영하기 위해서는 \(H_{2\times2}\) 로 변환해 줍니다.
- \[x' = H_{2\times2}x = H_{2\times2} \begin{bmatrix} 1 \\ 0 \end{bmatrix}\]
- 위 식과 같이
Vanishing Point인 \(x'\) 를 구할 수 있습니다.
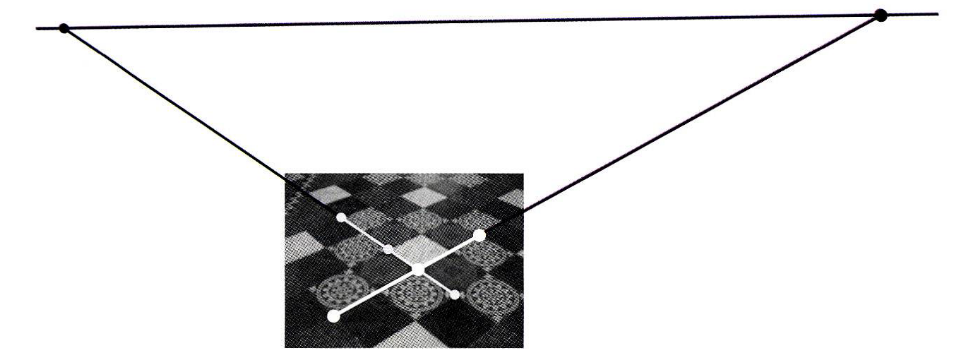
- 위 그림에서는
point at infinity를 결정하기 위하여 선분의 동일한 길이 비율을 사용합니다. 선분 간격은 가는 흰색 선을 이용하였고 점은 두꺼운 흰색 선으로 표시하였습니다. - 검은색 선은
line at infinity이며 검은색 두개의 점은point at infinity입니다. 이 점은 앞에서 다룬 변환과 마찬가지로 Perspective 왜곡이 없는 이미지의point at infinity에 \(H_{2\times2}\) 를 적용하여 Perspective 왜곡이 있는 이미지에서point at infinity를 구할 수 있습니다.
Circular Points and Their Dual
circular points의 개념을 배우기 전에 아래 링크에서Affine and Euclidean Geometry개념에 대하여 숙지하고 오면 도움이 됩니다.
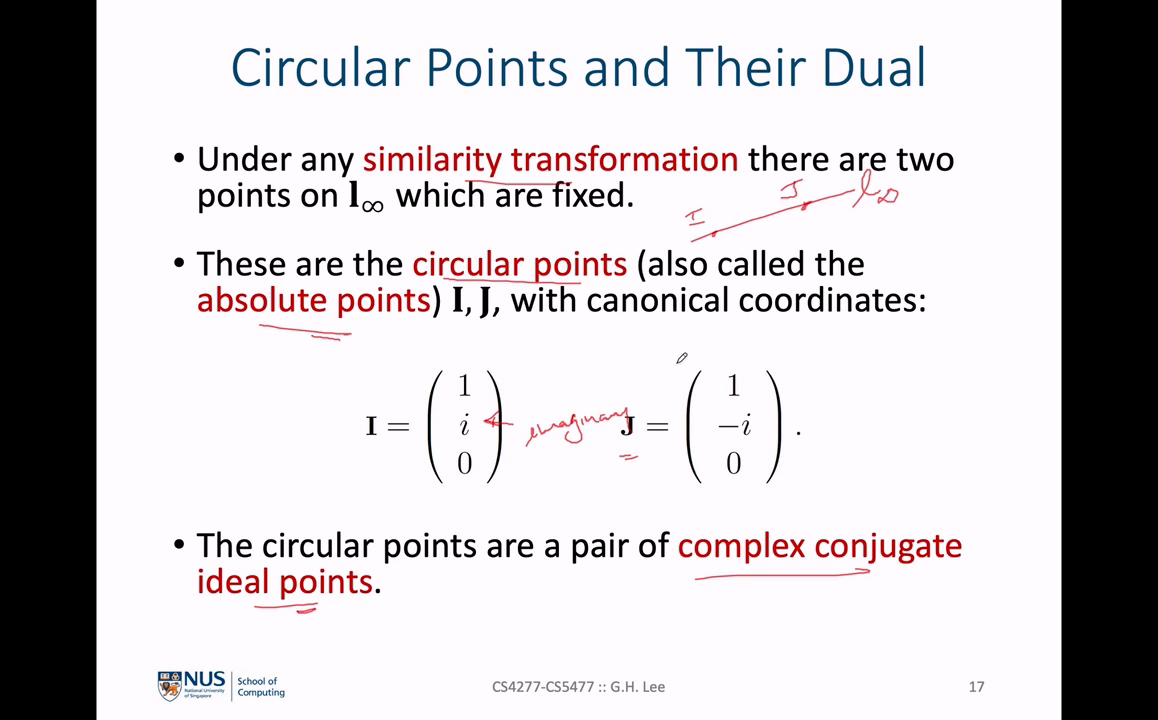
- 어떤 두 개의 점이 \(l_{\infty}\) (
line at infinity) 상에서similarity transformation에 대하여fixed point라고 생각해 보겠습니다. - 먼저
fixed point라고 하면 정의역과 공역이 공간 \(X\) 인 함수 \(f : X \to X\) 에 대하여 \(x_{0} \in X\) 가 \(f(x_{0}) = x_{0}\) 을 만족할 때, 이 점 \(x_{0}\) 를fixed points라고 합니다. - 이 때, \(l_{\infty}\) 상에 존재하는
fixed points인 두 개의 점을circular (absolute) points라고 하며 아래와 같이 복소수 형태로 나타냅니다. (이름의 의미는 이후 슬라이드에서 설명합니다.) - 아래 \(I, J\) 는 표준 좌표의 형태이며 다르게 변형될 수 있습니다.
- \[I = \begin{pmatrix} 1 \\ i \\ 0 \end{pmatrix}\]
- \[J = \begin{pmatrix} 1 \\ -i \\ 0 \end{pmatrix}\]
- 위 표준 좌표인 두 점 \(I, J\) 는 \(l_{\infty}\) 상에 있으므로 마지막 차원은 0인
ideal points형태를 만족합니다.
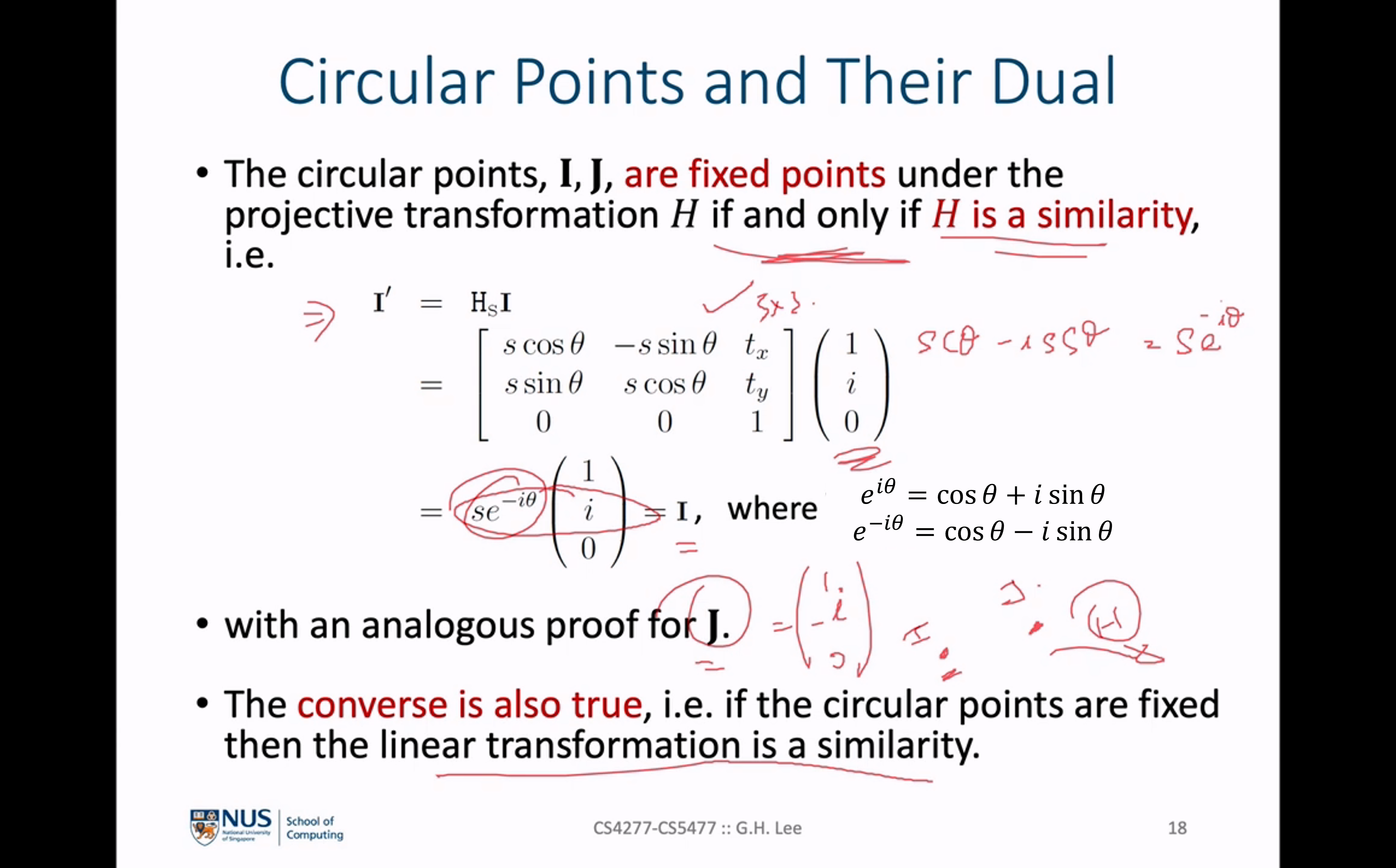
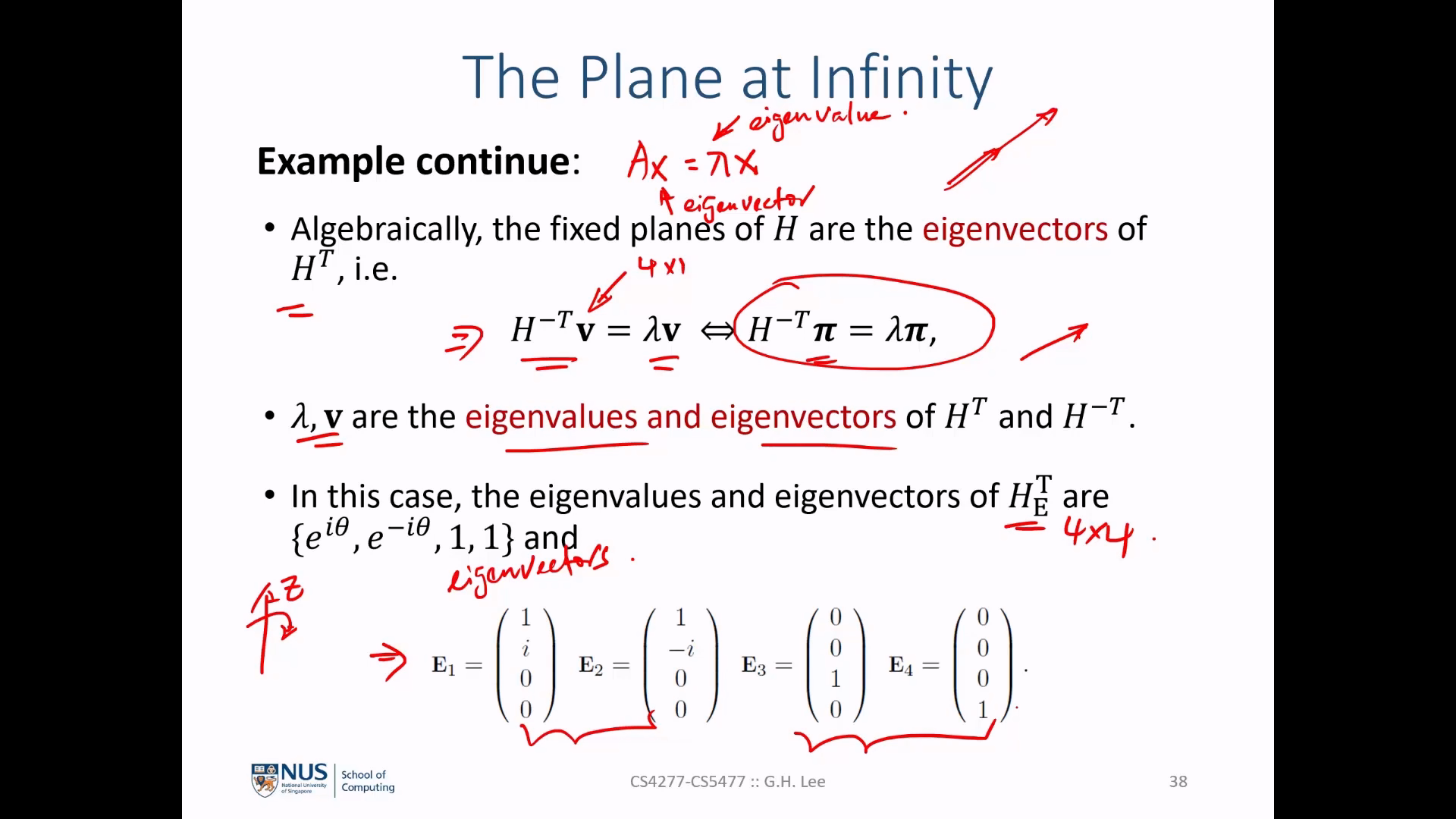
- 위 슬라이드에서는
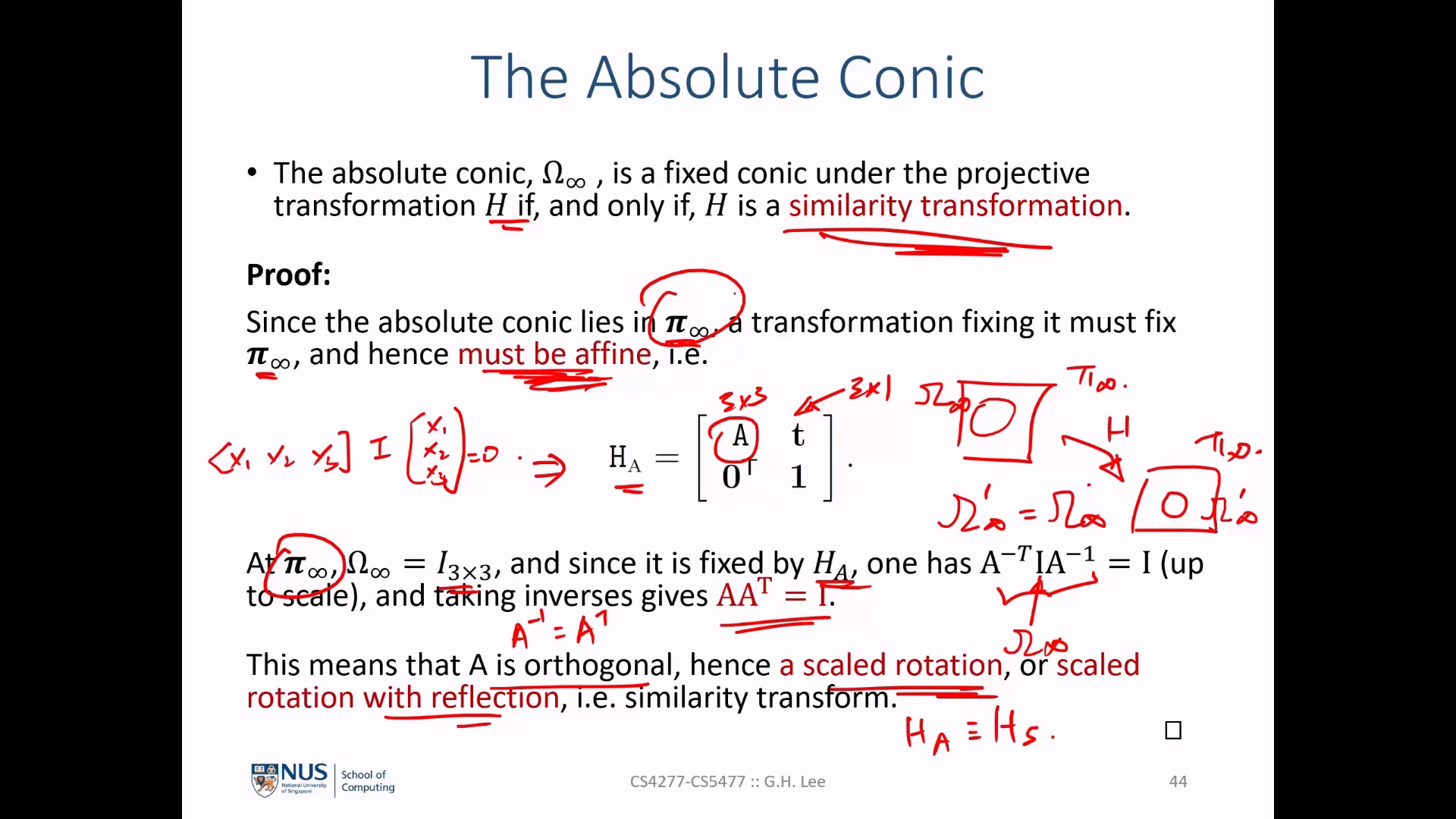
circular points인 \(I, J\) 가fixed point일 때, projective transformation \(H\) 는similarity transformation임이필요 충분 조건임을 설명합니다. - 따라서 위 슬라이드 조건과 앞에서 설명한
fixed point의 정의와 같이 \(I' = H_{x}I = I\) 임을 통하여 정의역 \(I\) 가 \(H_{x}\) 를 거치더라도 \(I\) 됨을 통하여fixed point임을 보입니다.
- 위 식에서 \(H_{s}\) 는
similarity transformation행렬로 아래 식을 따릅니다.
- \[H_{s} = \begin{bmatrix} s\cos{(\theta)} & -s\sin{(\theta)} & t_{x} \\ s\sin{(\theta)} & s\cos{(\theta)} & t_{y} \\ 0 & 0 & 1 \end{bmatrix}\]
- 따라서 위 식과 슬라이드의 오일러 공식을 이용하면 다음과 같이 정리할 수 있습니다.
- \[I' = H_{s}I = \begin{bmatrix} s\cos{(\theta)} & -s\sin{(\theta)} & t_{x} \\ s\sin{(\theta)} & s\cos{(\theta)} & t_{y} \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} 1 \\ i \\ 0 \end{bmatrix}\]
- \[= \begin{bmatrix} s \cdot \cos{(\theta)} - s \cdot i \cdot \sin{(\theta)} \\ s \cdot \sin{(\theta)} + s \cdot i \cdot \cos{(\theta)} \end{bmatrix}\]
- \[= s \begin{bmatrix} \cos{(\theta)} - i \cdot \sin{(\theta)} \\ \sin{(\theta)} + i \cdot \cos{(\theta)} \\ 0 \end{bmatrix}\]
- \[= s \begin{bmatrix} e^{-i\theta} \\ i(\cos{(\theta)} - i\sin{(\theta)}) \\ 0 \end{bmatrix}\]
- \[= s \begin{bmatrix} e^{-i\theta} \\ i(e^{-i\theta}) \\ 0 \end{bmatrix}\]
- \[= s e^{-i\theta} \begin{bmatrix} 1 \\ i \\ 0 \end{bmatrix}\]
- 마지막 식이 \(I\) 가 되면
fixed points임을 만족하며 \(l_{\infty}\) 상에서는 스케일 변환이 허용되기 때문에 아래와 최종 식은 \(I\) 와 동일함을 알 수 있습니다.
- \[I' = H_{x}I = s e^{-i\theta} \begin{bmatrix} 1 \\ i \\ 0 \end{bmatrix} = I\]
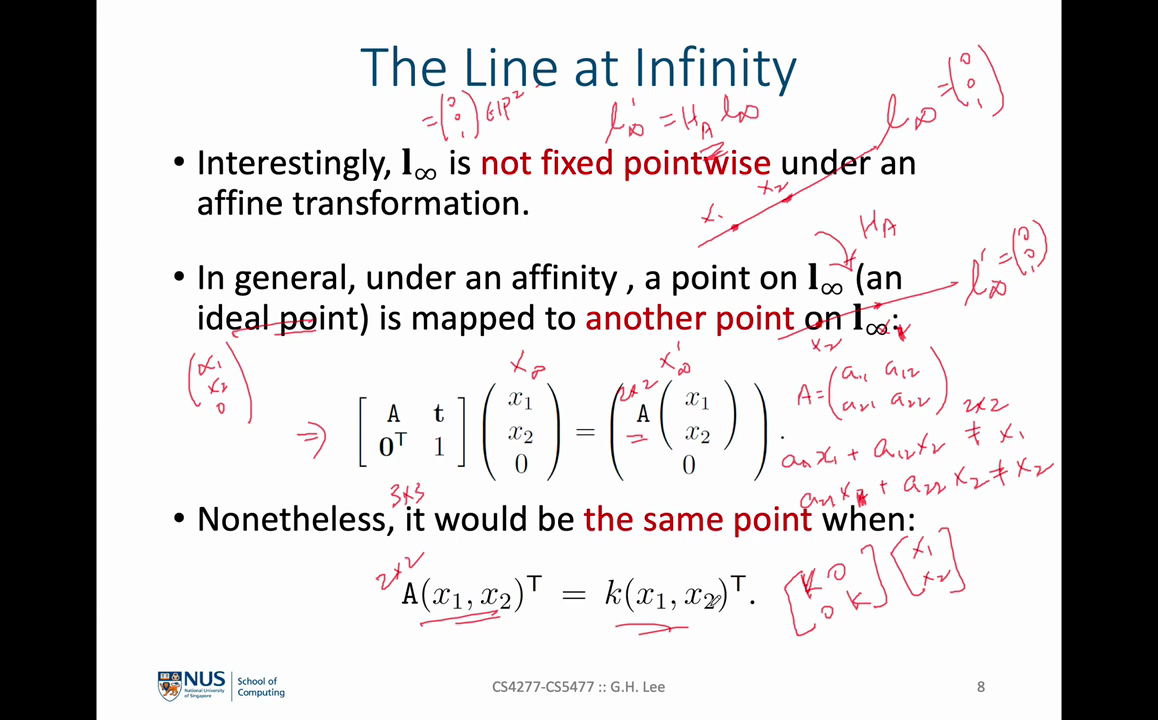
- 위 식의 뜻은
similarity transformation에 의해서는 \(l_{\infty}\) 에 있는ideal point가 변하지 않음을 나타냅니다.
- 위 식과 같은 전개 과정을 \(J\) 에 대하여 적용하면 유사하게 유도할 수 있습니다.
- 따라서
circular points가fixed points이면 이 때 사용된transformation matrix는similarity transformation임을 확인할 수 있었습니다.
- 이번 슬라이드에서는
circular points의 의미에 대하여 설명합니다. - 이전 강의에서 배운
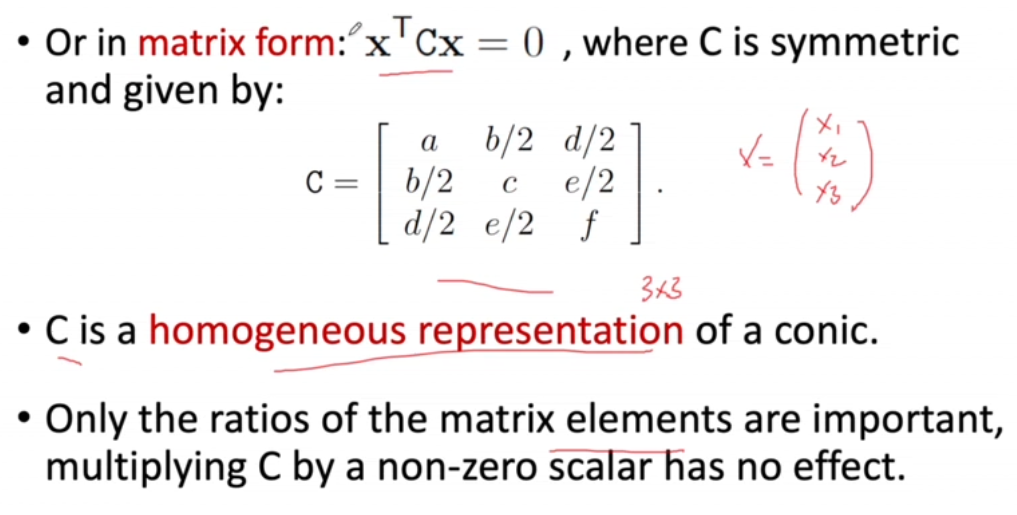
conics관련 식은 아래와 같습니다.
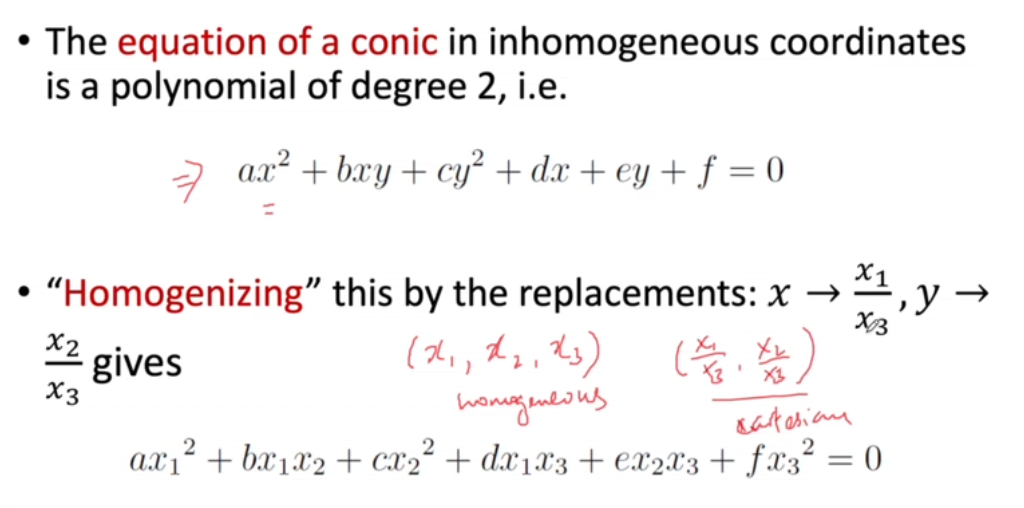
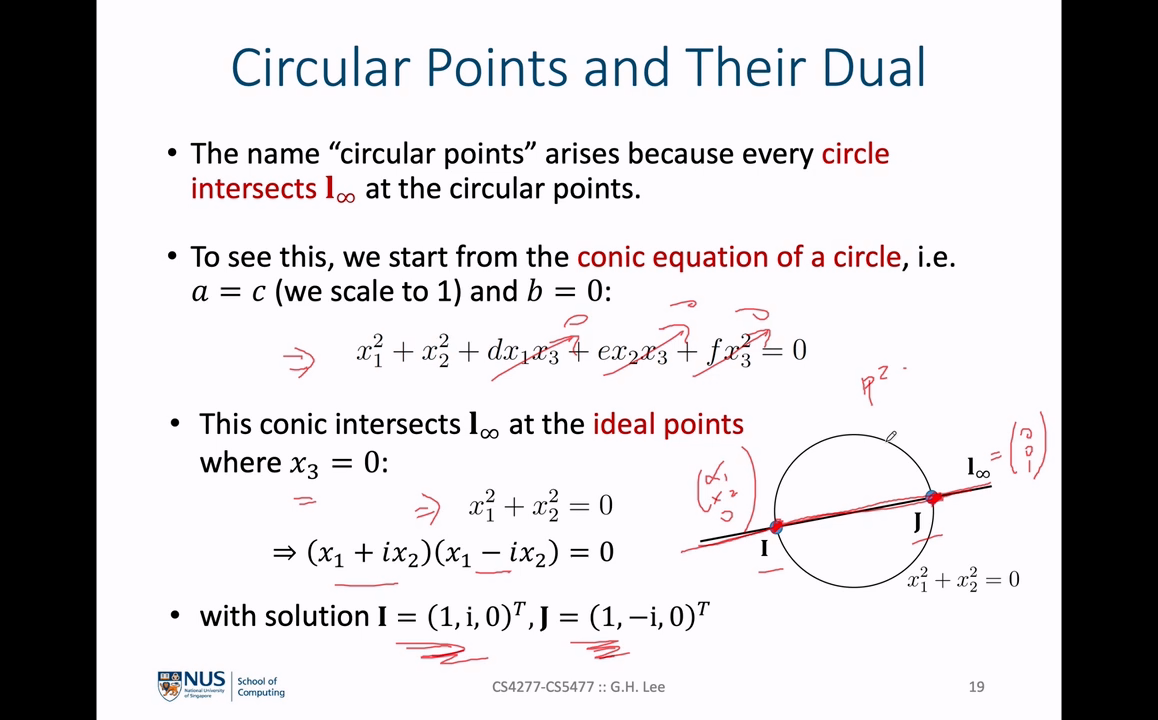
circular points를 살펴보기 위하여 위 슬라이드의conics식에서a = c = s (ex. 1),b = 0으로 두겠습니다. a와 c를 1로 둔 것은 편의를 위함이고 scale 값인 임의의s를 적용해도 무관합니다.
- \[x_{1}^{2} + x_{2}^{2} + dx_{1}x_{3} + ex_{1}x_{3} + fx_{3}^{2} = 0\]
- 위 식은 homogeneous coordinate에서의 원의 방정식에 해당합니다. 즉,
conics → circle으로 구성하였습니다. - 여기서 \(l_{\infty}\) 와
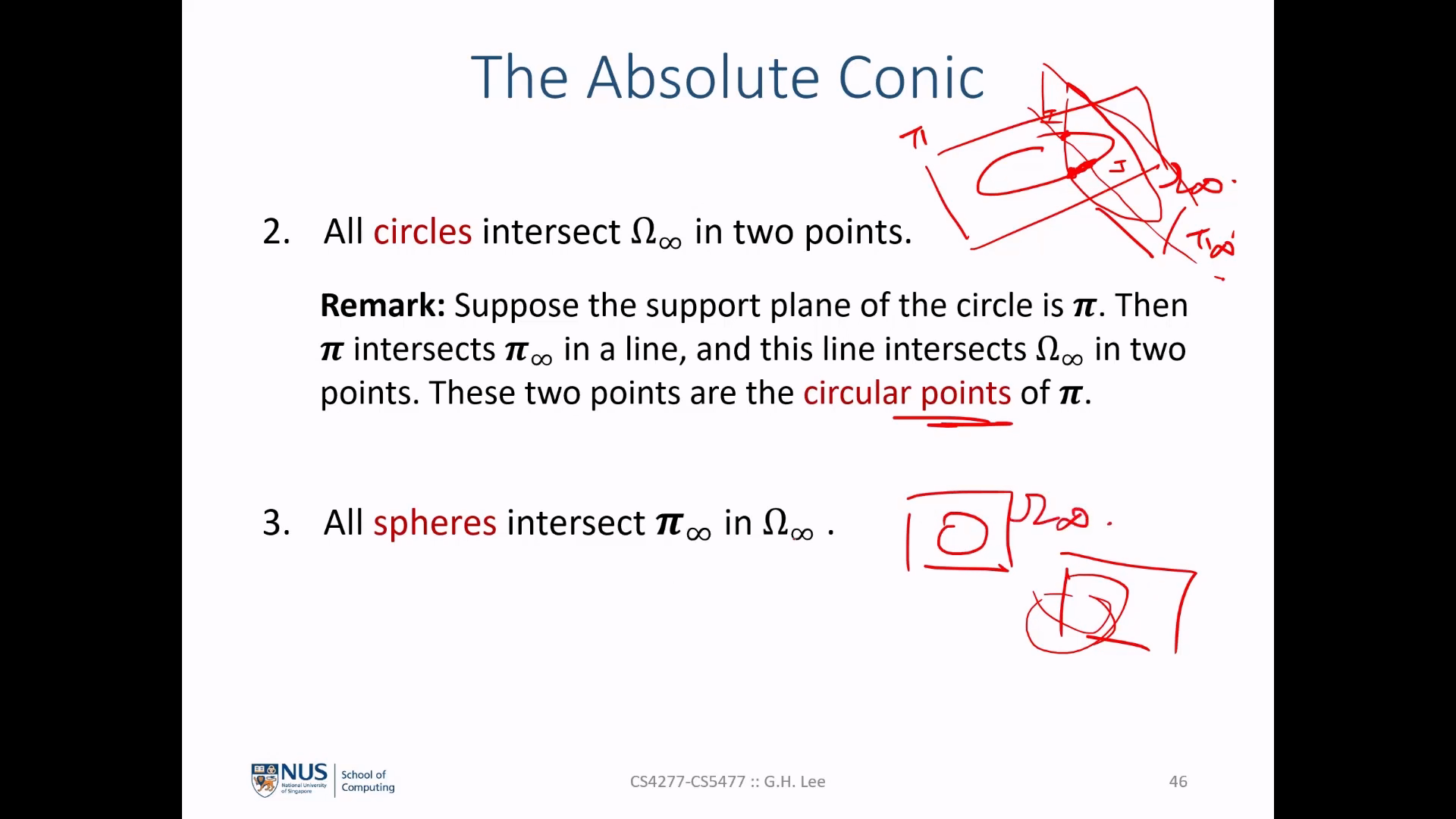
conic이 교차하는 지점의ideal points는 슬라이드와 같이 \(I, J\) 에서 만나게 됨을 알 수 있으며 이 때ideal points의 좌표가 앞에서 다룬 \(I, J\) 가 됩니다. - 이 때
ideal points는 \(x_{3} = 0\) 조건과 \(x_{1}^{2} + x_{2}^{2} = 0\) 이 되어야 식을 만족할 수 있습니다. 따라서 \(I = (1, i, 0)^{T}, J = (1, -i , 0)^{T}\) 의 복소수 해를 구할 수 있습니다. - 위 과정을 통해
circular points의 각 요소는 복소수로 확장됨을 확인할 수 있으며 모든circle은circular points에서 \(l_{\infty}\) 와 교차하는 것을 확인할 수 있습니다.
- 위 연산 과정을 통하여
circular points을 확인할 수 있으면 추후에 알아볼similarity복원 시 circular points를 활용할 수 있습니다. circular points를 분해하여 살펴보면euclidean geometry에서의orthogonal인 \((1, 0, 0)^{T}\) 와 \((0, 1, 0)^{T}\) 이며 한 개의 켤레 복소수가 합쳐진 것임을 알 수 있습니다.
- \[I = (1, 0, 0)^{T} + i (0, 1, 0)^{T}\]
- \[J = (1, 0, 0)^{T} + i (0, -1, 0)^{T}\]
- 따라서
circular points가 확인되면orthogonal과metric속성이 결정됩니다.
- 일반적으로
degenerate line conic은 \(C^{*} = xy^{T} + yx^{T}\) 와 같이 정의되며conic상의 2개의 점x,y를 통하여 만들 수 있습니다.- https://gaussian37.github.io/vision-mvg-nus_lec1/에서
degenereate conic부분을 참조하시면 됩니다.
- https://gaussian37.github.io/vision-mvg-nus_lec1/에서
- 2개의 점 x, y를
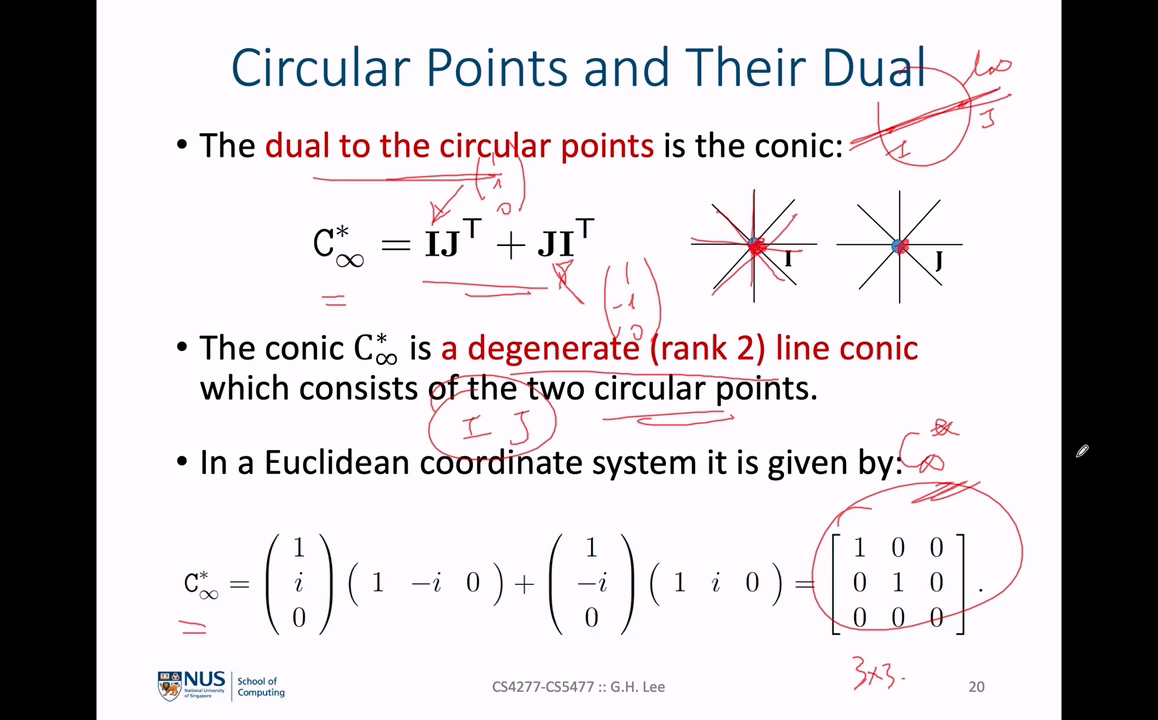
circular points인I,J를 이용하여 표현하면 \(l_{\infty}\) 가 관통하는degenerate line conic을 만들 수 있고 \(C^{*}_{\infty}\) 라고 표현합니다.line은 \(l_{\infty}\) 가 되며I와J를 각각 통과하는 직선이 됩니다. - 그리고 \(C^{*}_{\infty}\) 을 풀어 쓰면
degenerate line conic with circular points가 되며degenerate가 되었으므로 Rank가 2이면 두 점, Rank가 1이면 중복된 1개의 점이 conic 상에 있는 것을 알 수 있습니다. - 위 슬라이드에서는 Rank 2를 가정하였으므로
I,J두 점에서 각각 통과하는 직선들로 구성되는 것을 그림으로 나타내었습니다. - 추가적으로 표준 좌표를 이용하여 \(C^{*}_{\infty}\) 를 수식으로 나타내면 Rank가 2인 행렬이 되는 것을 슬라이드를 통해 확인할 수 있습니다.
- 마지막 부분의 계산에서 \(IJ^{T} + JI^{T}\) 계산 결과가 등호가 성립하는 이유는 \(l_{\infty}\) 상에서는 스케일 변환이 허용되기 때문입니다.
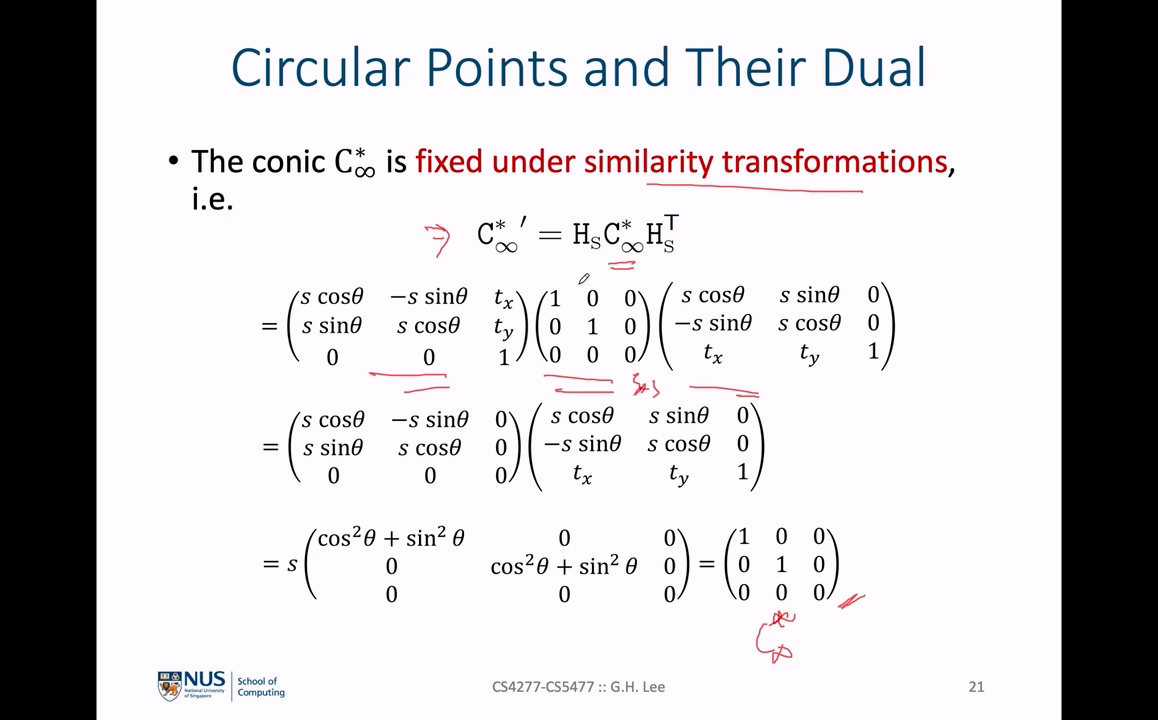
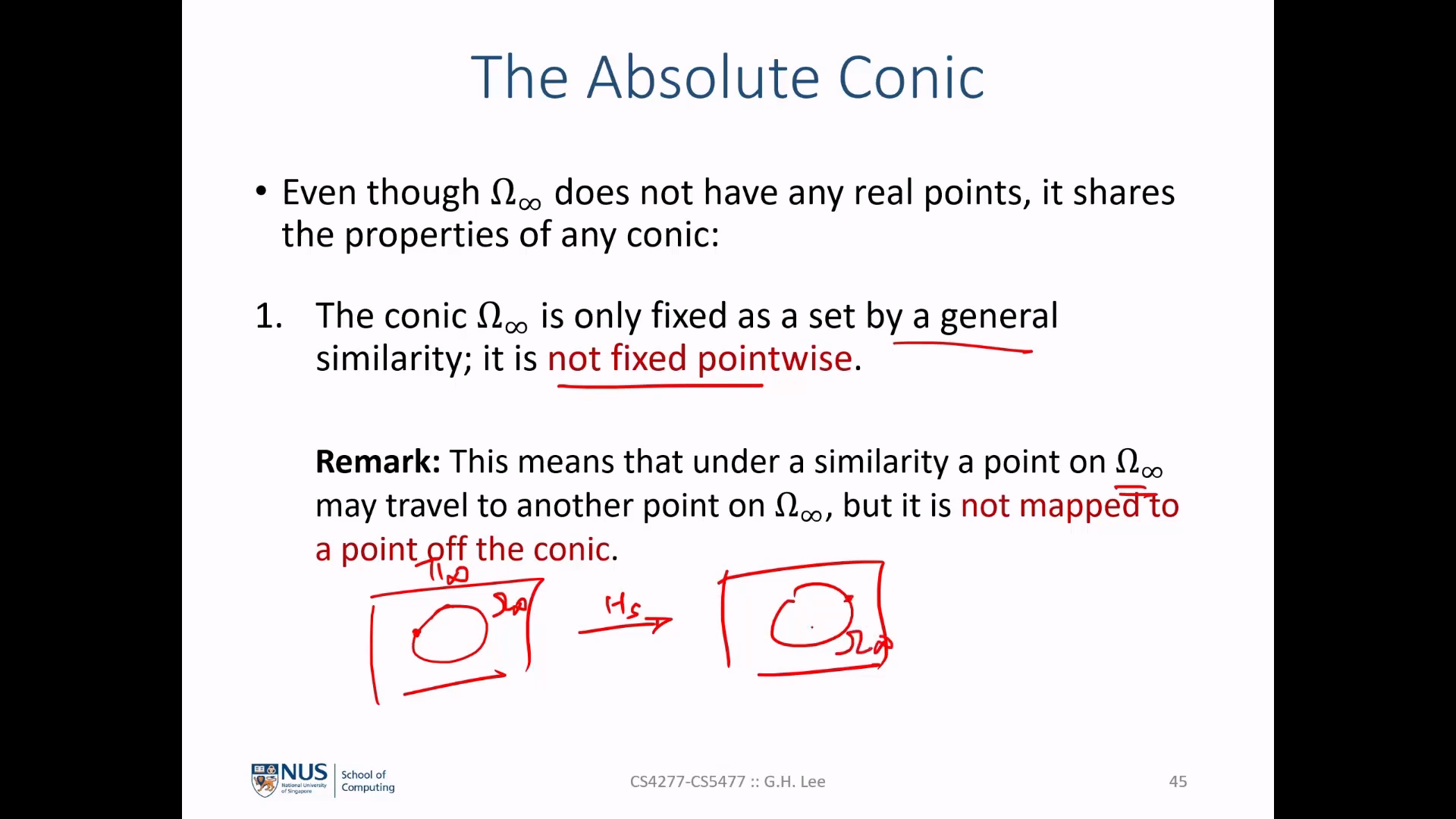
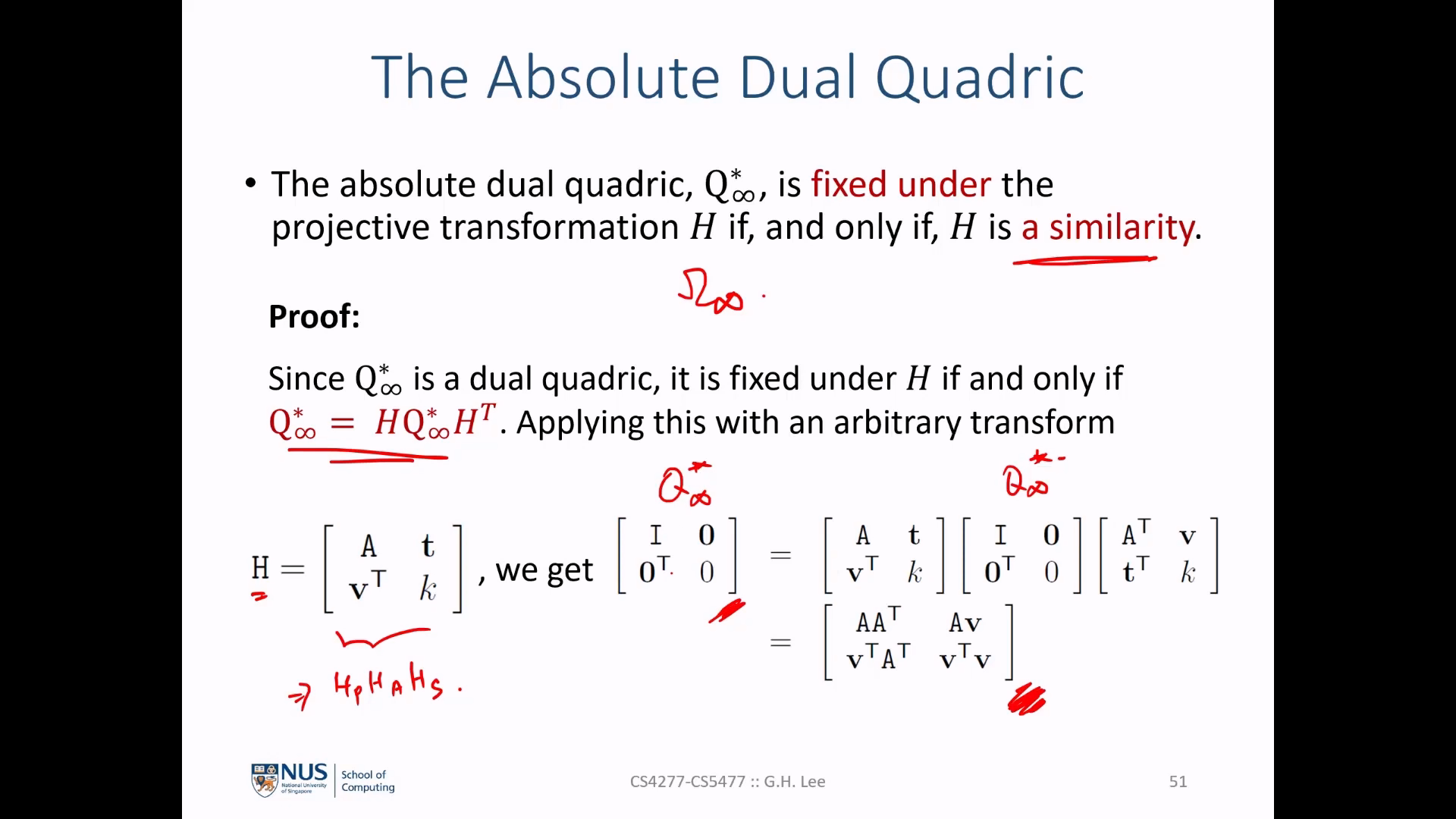
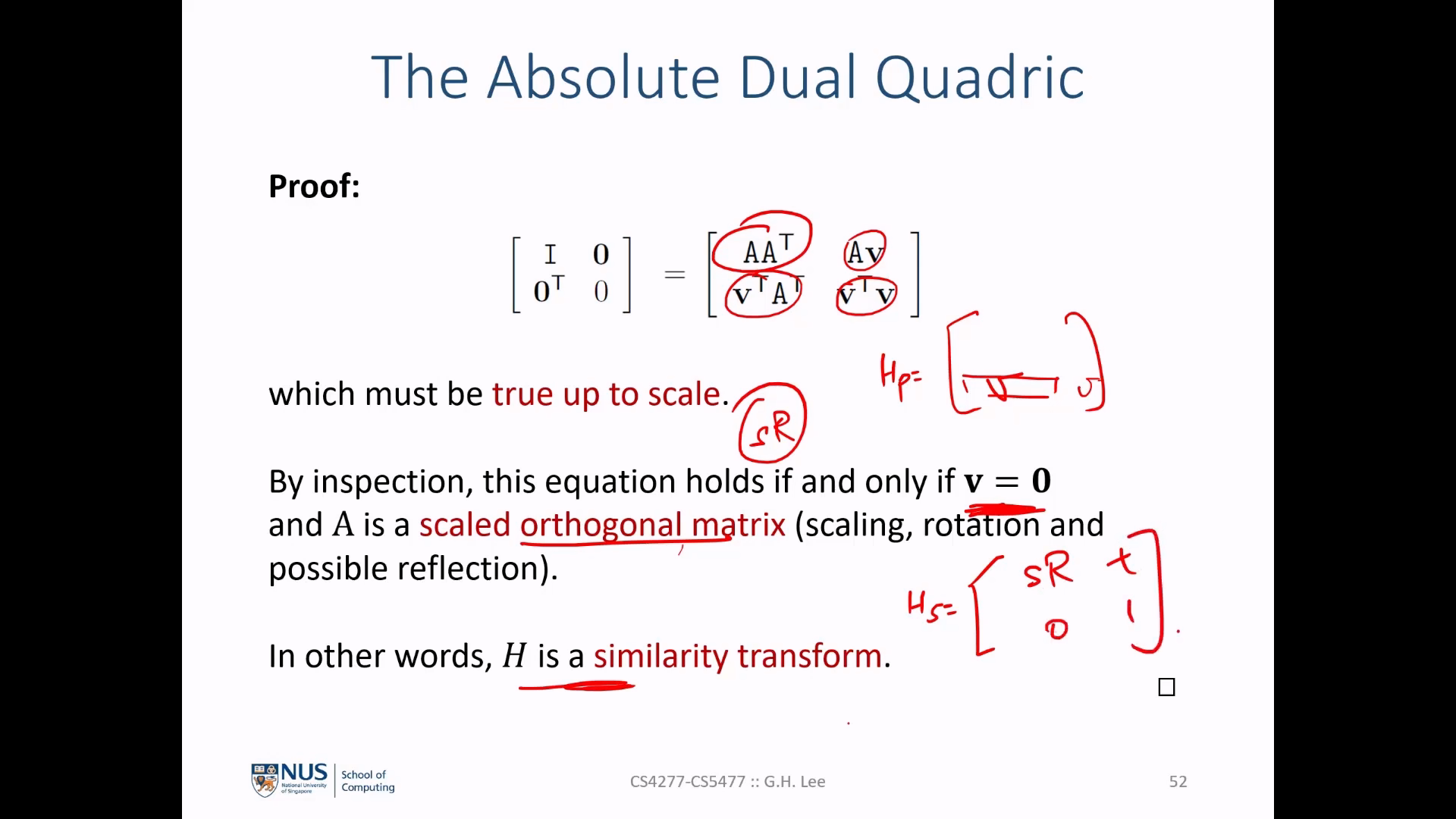
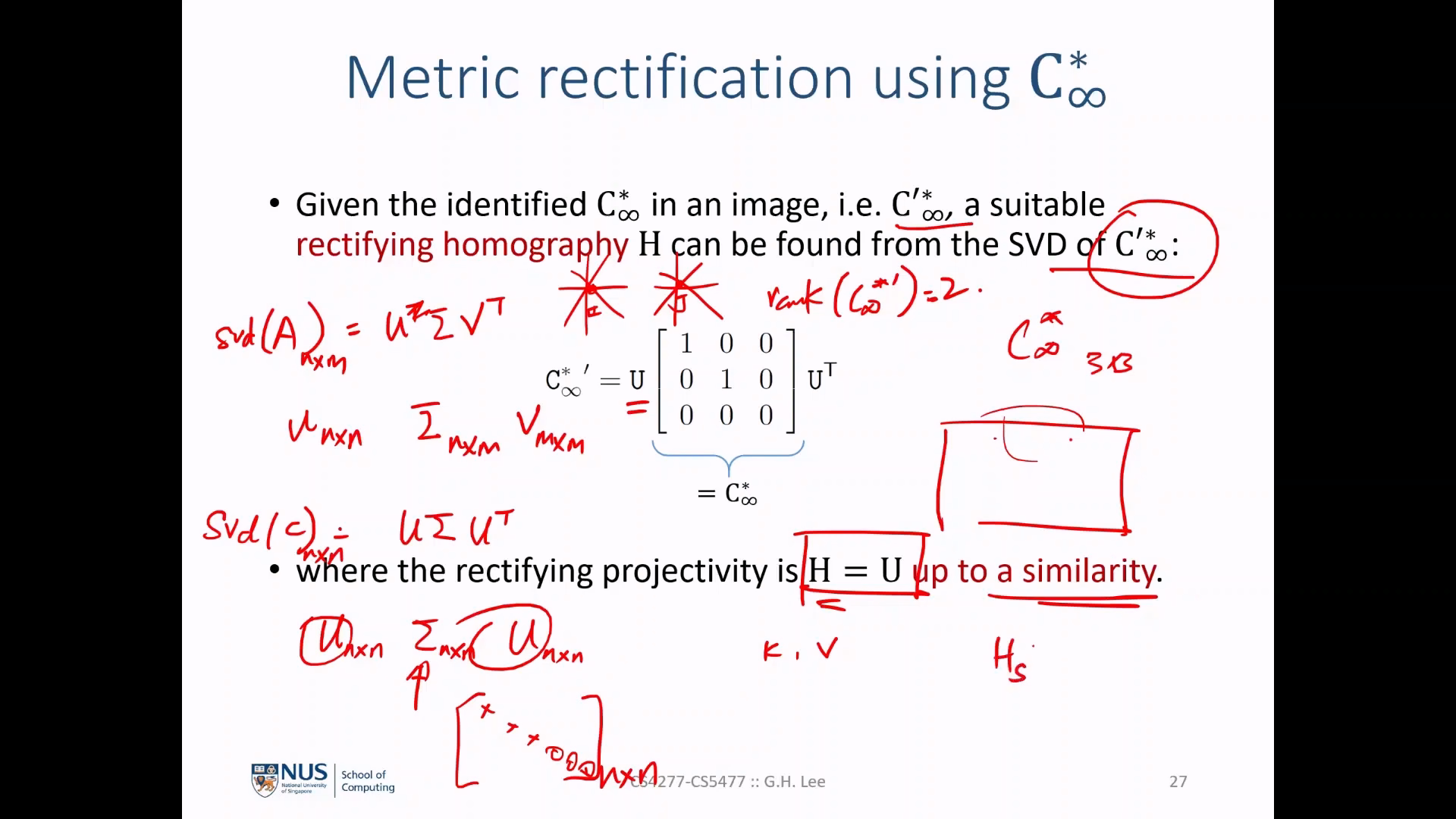
- 위 슬라이드에서는 앞선 슬라이드에서 보여준 것 처럼 \(C^{*}_{\infty}\) 에서 또한
similarity transformation을 적용하면fixed가 됨을 보여줍니다. - 식 전개에서 \(C^{*}_{\infty} {'} = H_{S} C^{*}_{\infty} H_{S}^{T}\) 가 됨은 이전 글에서 다루었던 내용입니다. 간략히 정리하면 다음과 같습니다.
- 점 변환 \(x' = Hx\) 에 대하여 다음과 같이 변환 됩니다.
- \[x = H^{-1}x'\]
- \[x^{T}C x = (H^{-1}x')^{T} C H^{-1}x' = x'^{T} H^{-T} C H^{-1}x' = x'^{T}(H^{-T} C H^{-1})x'\]
- \[\therefore \quad C' = H^{-T} C H^{-1}\]
- 즉, 점 변환을 위한 행렬 \(H\) 가 있을 때, 이 행렬을 통해
conic\(C \to C'\) 로 변환하려면 다음 식을 따릅니다.
- \[C' = H^{-T} C H^{-1}\]
- 그리고 \(l^{T}C^{*}l = 0\) 과 \(x^{T}Cx = 0\) 에서의 \(C^{*}\) 와 \(C\) 의 관계는 이전 글에서 \(C^{*} = C^{-1}\) 임을 확인하였으므로 다음과 같이 표현할 수 있습니다. 따라서 양변에 역행렬을 적용하여 구하면 다음과 같습니다.
- \[C'^{-1} = (H^{-T} C H^{-1})^{-1}\]
- \[C^{*}{'} = H C^{*} H^{T}\]
- 따라서 위 슬라이드에서 \(C^{*}_{\infty}\) 또한 다음과 같은 식을 따릅니다.
- \[C^{*}_{\infty}{'} = H_{S} C^{*}_{\infty} H_{S}^{T}\]
- 위 식의 최종 전개에서도 \(l_{\infty}\) 상에서는 스케일 변환이 허용되기 때문에 \(s\) 는 무시하여 등호가 성립하다고 말할 수 있습니다.
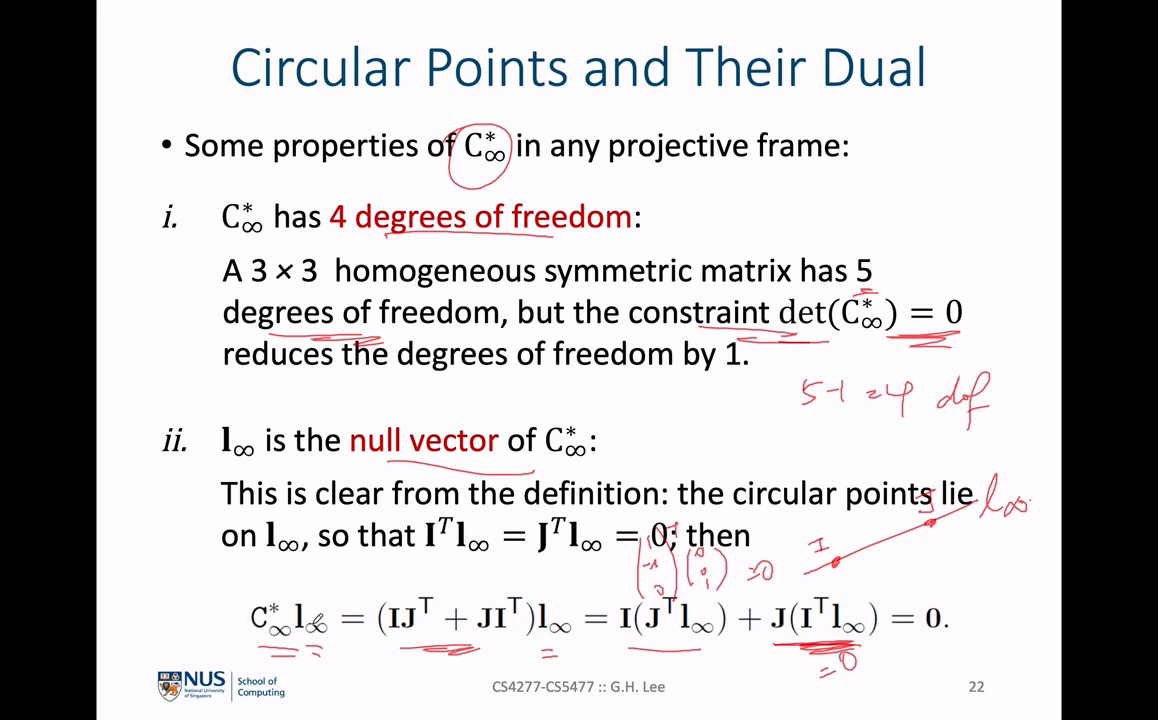
- 위 슬라이드에서는 지금까지 살펴본 \(C^{*}_{\infty}\) 내용을 통해 2가지 특성에 대하여 설명합니다.
- ① \(C^{*}_{\infty}\) 은 4 DoF (Degree of Freedom)을 가집니다. 원래 \(C^{*}_{\infty}\) 는 3 X 3 대칭 행렬이고 (3, 3) 위치의 스케일 값을 무시한다고 하면 5개의 자유도를 가집니다. 그리고 \(\text{det}(C^{*}_{\infty}) = 0\) 을 만족해야 하므로 자유 변수가 1개 더 생기므로 DoF는 4개로 줄어듭니다.
- 여기서 \(\text{det}(C^{*}_{\infty}) = 0\) 를 만족할 때,
DoF가 1 감소하는 것은 다음 예시를 통해 이해할 수 있습니다.
- \[S = \begin{bmatrix} a & b \\ b & d \end{bmatrix}\]
- 위 행렬의 기본적인
DoF는 3입니다. 여기서 (2, 2) 위치의 값이 스케일이라면 (Up to Scale) 앞에서 다룬 내용과 같이DoF가 2가 됩니다. - 만약 \(\text{det}(S) = 0\) 을 만족한다면 \(ad - b^{2} = 0\) 을 만족해야 하고 \(a\) 가 정해지면 나머지 \(d\) 의 값에
dependency가 발생하기 때문에DoF가 1로 줄어들게 됩니다. - 이와 같은 이유로
determinant = 0인 상황에서는DoF가 1 감소하게 됩니다.
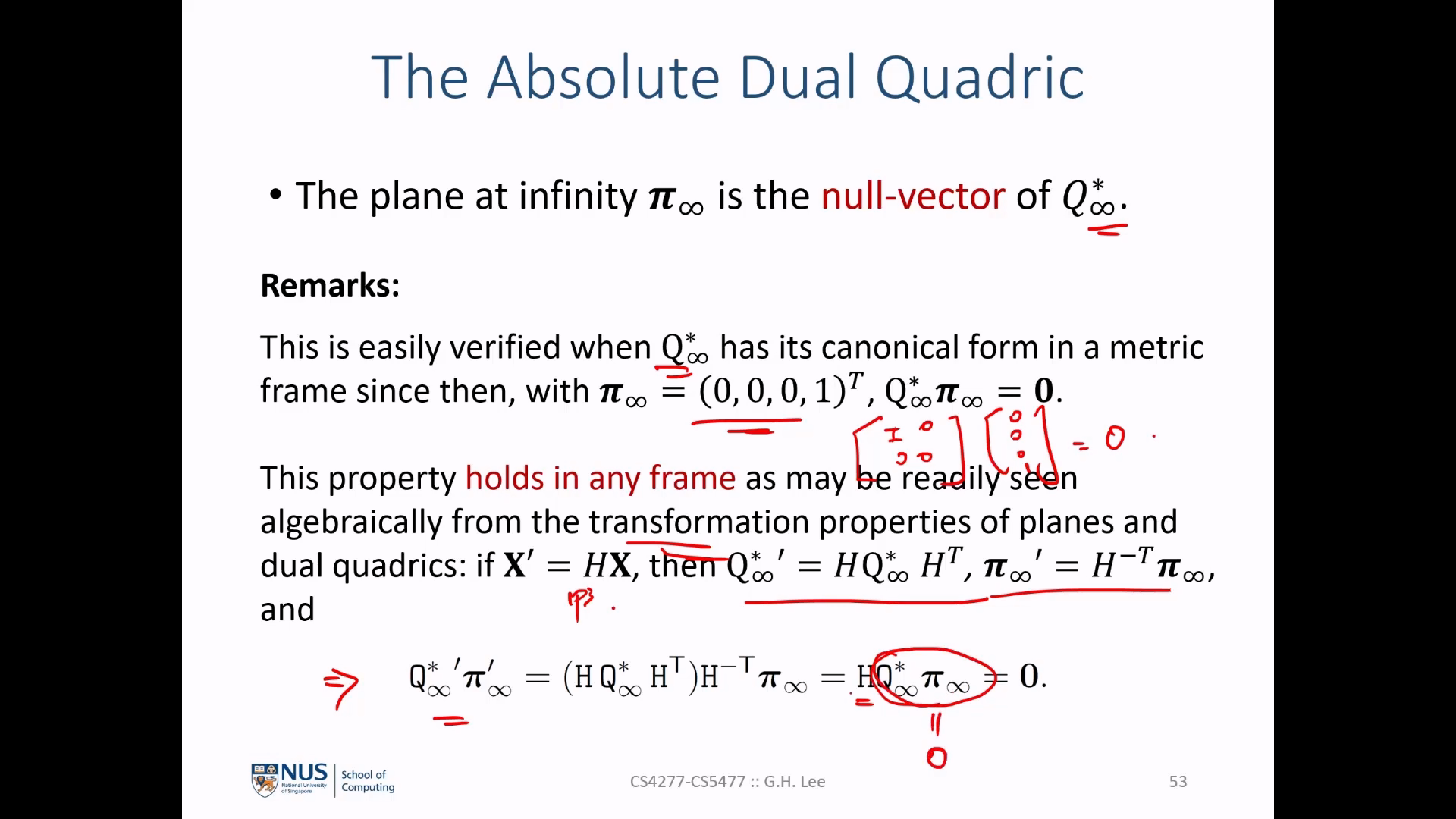
- ② \(l_{\infty}\) 는 \(C^{*}_{\infty}\) 의
null vector를 의미합니다. 즉, \(C^{*}_{\infty}\) 을 만족하는 점들 (circular points) 들이 \(l_{\infty}\) 에 존재한다는 의미이며 슬라이드의 식과 같이 간단히 수식으로 전개 됩니다.
- 지금 부터는 Circular points and Absolute conic 강의의 중반부 내용을 살펴보도록 하겠습니다.
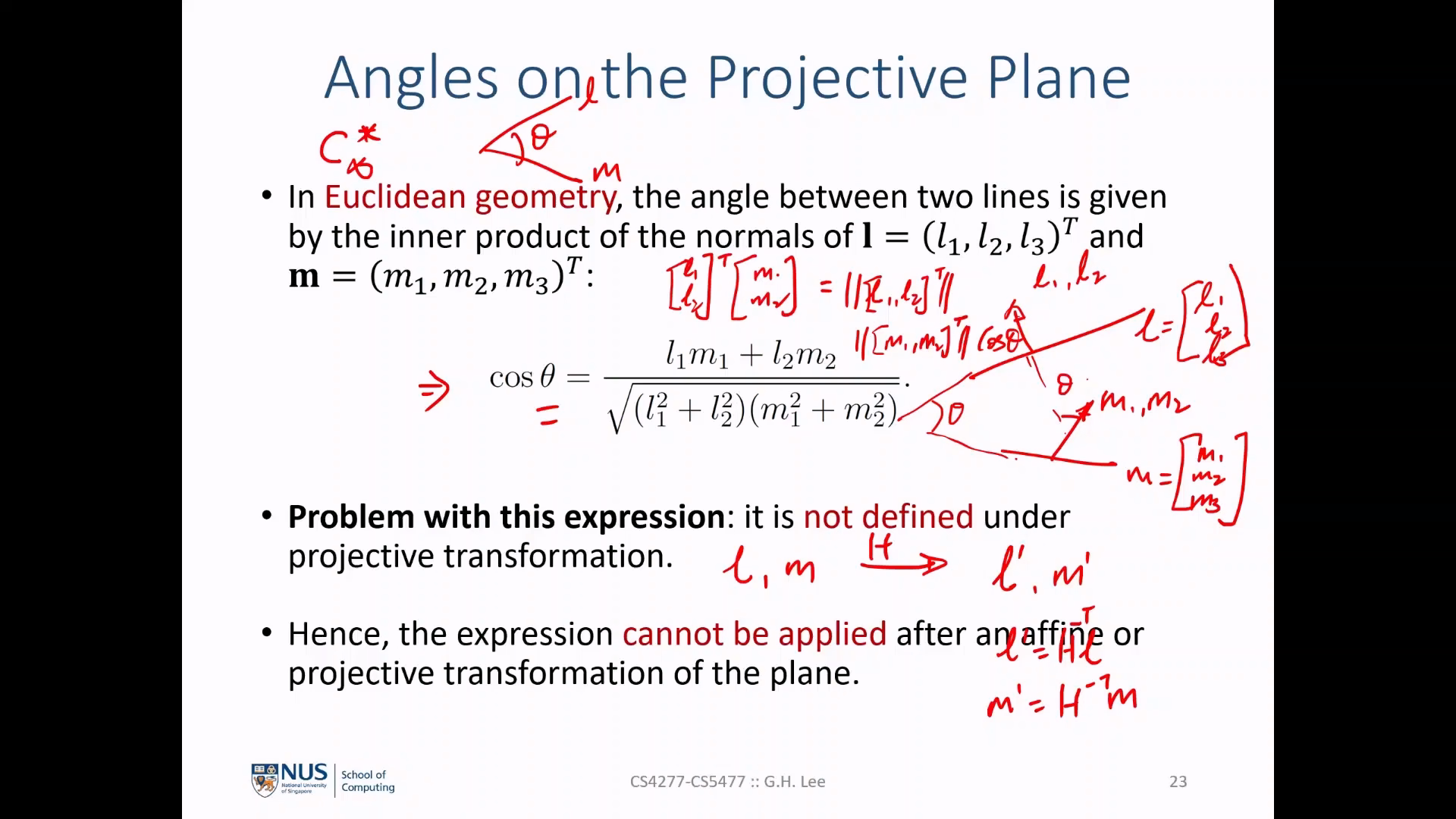
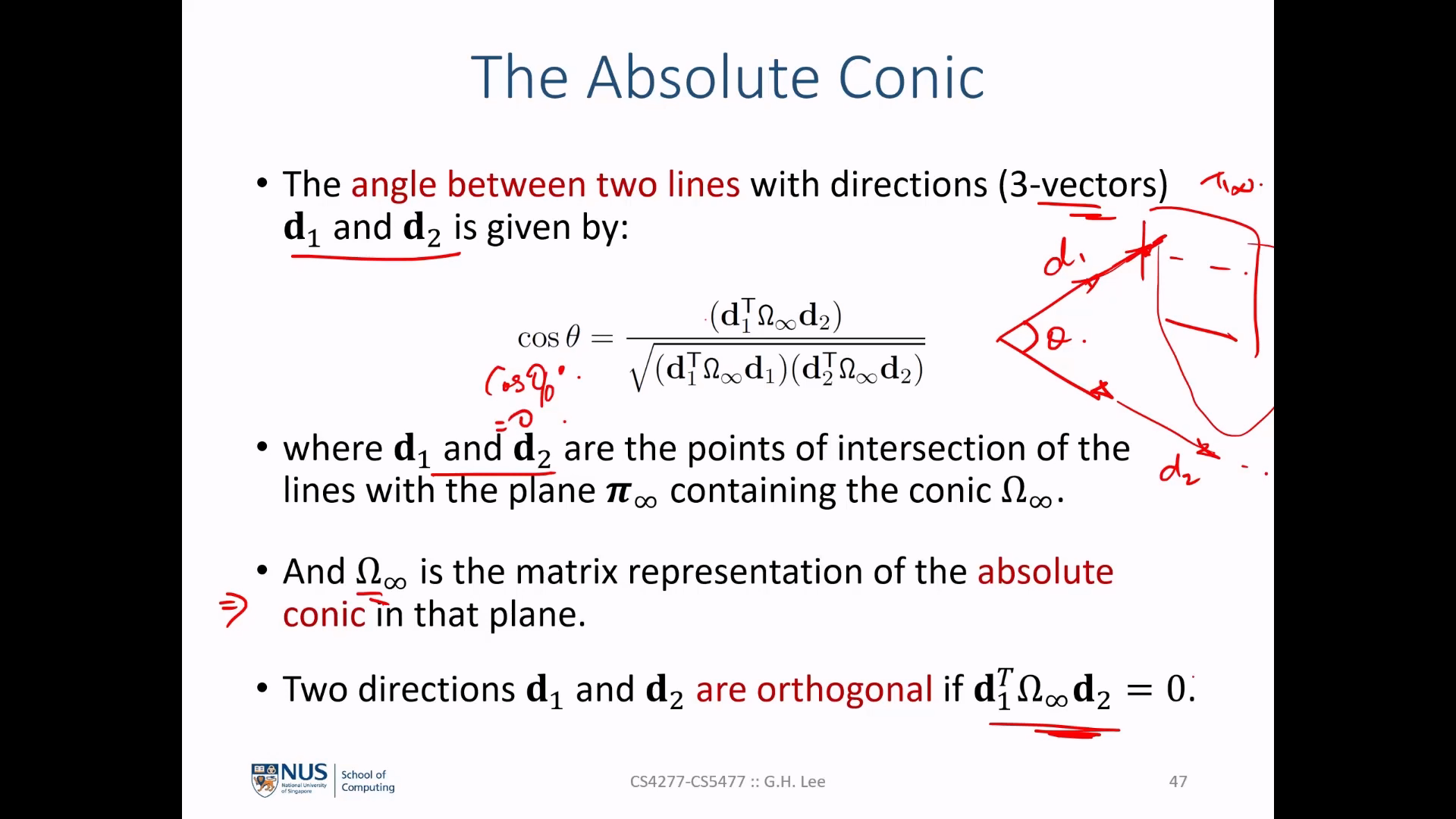
- 두 벡터의 내적을 이용하여 두 벡터 사이의 각도 \(\theta\) 를 계산하는 방법을 익히 알고 있고 각 선의 식을 이용하여 각 선의
normal vector를 구할 수 있으므로 두 선의 각normal vector간의 사이각을 통해 두 선의 사이각을 구할 수 있습니다.
- \[l = (l_{1}, l_{2}, l_{3})^{T}\]
- \[m = (m_{1}, m_{2}, m_{3})^{T}\]
- \[\text{normal vector of } l \text{ : } (l_{1}, l_{2})^{T}\]
- \[\text{normal vector of } m \text{ : } (m_{1}, m_{2})^{T}\]
- 따라서 두
normal vector의 내적을 통하여 사이각을 구하면 아래와 같습니다.
- \[\cos{(\theta)} = \frac{l_{1}m_{1} + l_{2}m_{2}}{\sqrt{(l_{1}^{2} + l_{2}^{2}) + (m_{1}^{2} + m_{2}^{2})}}\]
- ※ 참고로
line을 이용하여normal vector를 구하는 방법은 다음과 같습니다.
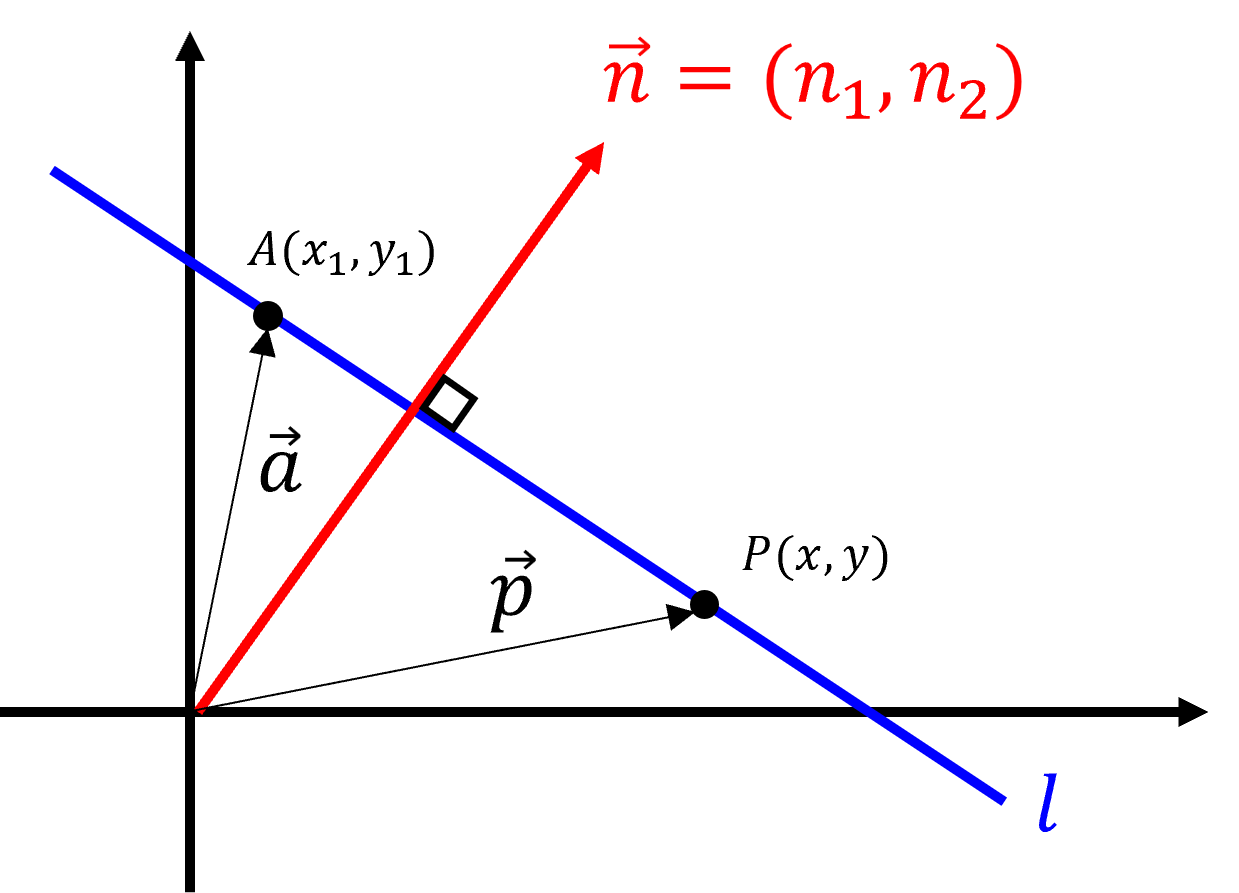
- \[\vec{AP} \perp \vec{n}\]
- \[\vec{AP} \cdot \vec{n} = 0\]
- \[(\vec{p} - \vec{a}) \cdot \vec{n} = 0\]
- \[((x, y) - (x_{1}, y_{1})) \cdot (n_{1}, n_{2}) = 0\]
- \[(x - x_{1}, y - y_{1}) \cdot (n_{1}, n_{2}) = 0\]
- \[n_{1}(x - x_{1}) + n_{2}(y - y_{1}) = 0\]
- \[n_{1}x + n_{2}y - (n_{1}x_{1} + n_{2}y_{1}) = 0\]
- 따라서 \(l = (l_{1}, l_{2}, l_{3})\) 에서 \((l_{1}, l_{2}) = (n_{1}, n_{2})\) 가 되어
normal vector를line을 이용하여 만들 수 있습니다. - 최종적으로 두 벡터의 내적을 통해 다음과 같이 사잇각을 구할 수 있습니다.
- \[\begin{bmatrix} l_{1} \\ l_{2} \end{bmatrix}^{T} \begin{bmatrix} m_{1} \\ m_{2} \end{bmatrix} = \Vert \begin{bmatrix} l_{1} & l_{2} \end{bmatrix}^{T} \Vert \Vert \begin{bmatrix} m_{1} & m_{2} \end{bmatrix}^{T} \Vert \cos{(\theta)}\]
- \[\cos{(\theta)} = \frac{l_{1}m_{1} + l_{2}m_{2}}{\sqrt{(l_{1}^{2} + l_{2}^{2}) + (m_{1}^{2} + m_{2}^{2})}}\]
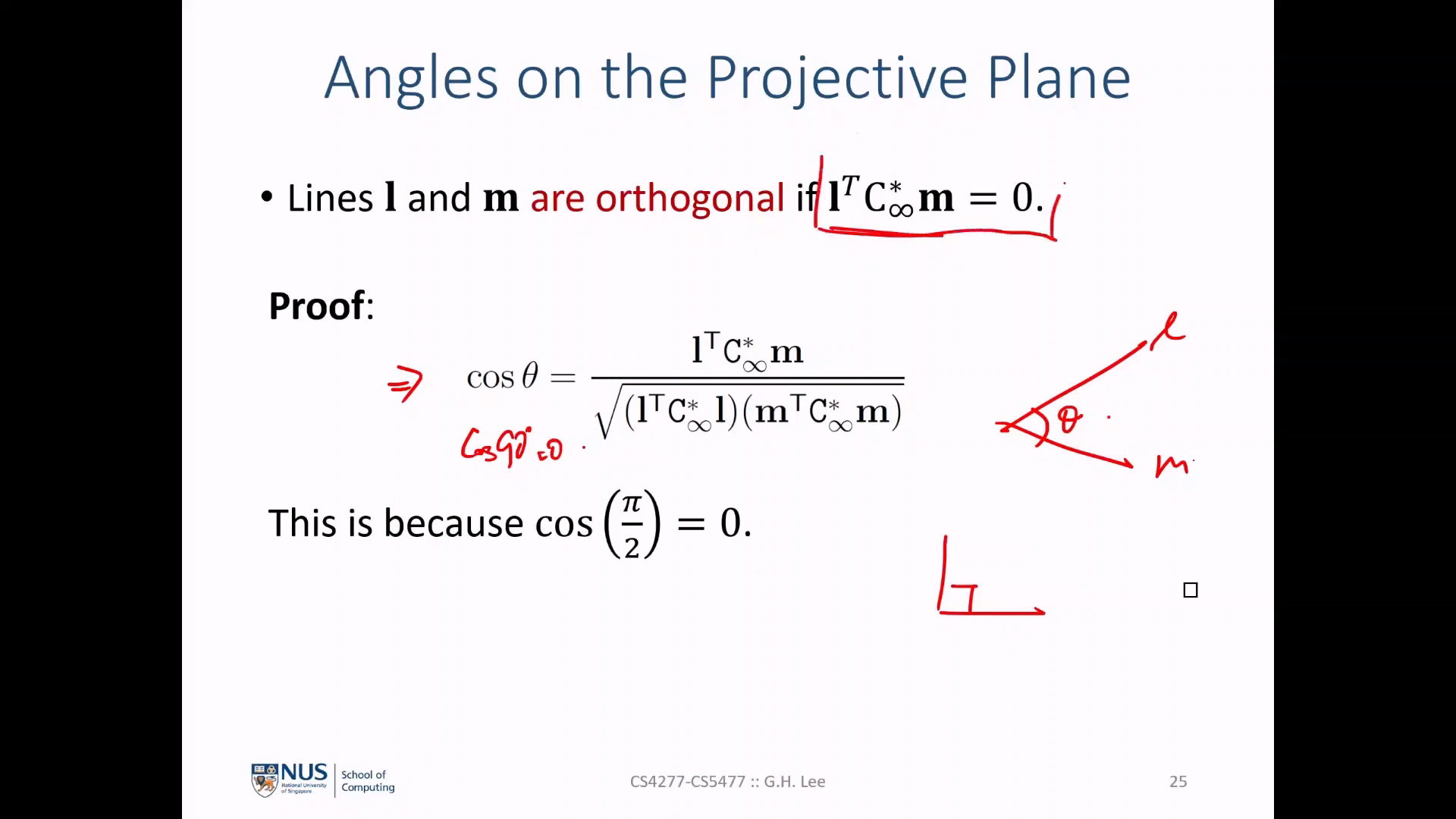
- 이와 같은 방식으로 두 선 사이의 각을 구할 수 있으나
affine/projective transformation이 적용되었을 때에는angle이 유지되지 않기 때문에 \(l, m\)line의 사이각을 \(l'= H^{-T}l, m' = H^{-T}m\) 에서 적용할 수 없습니다.
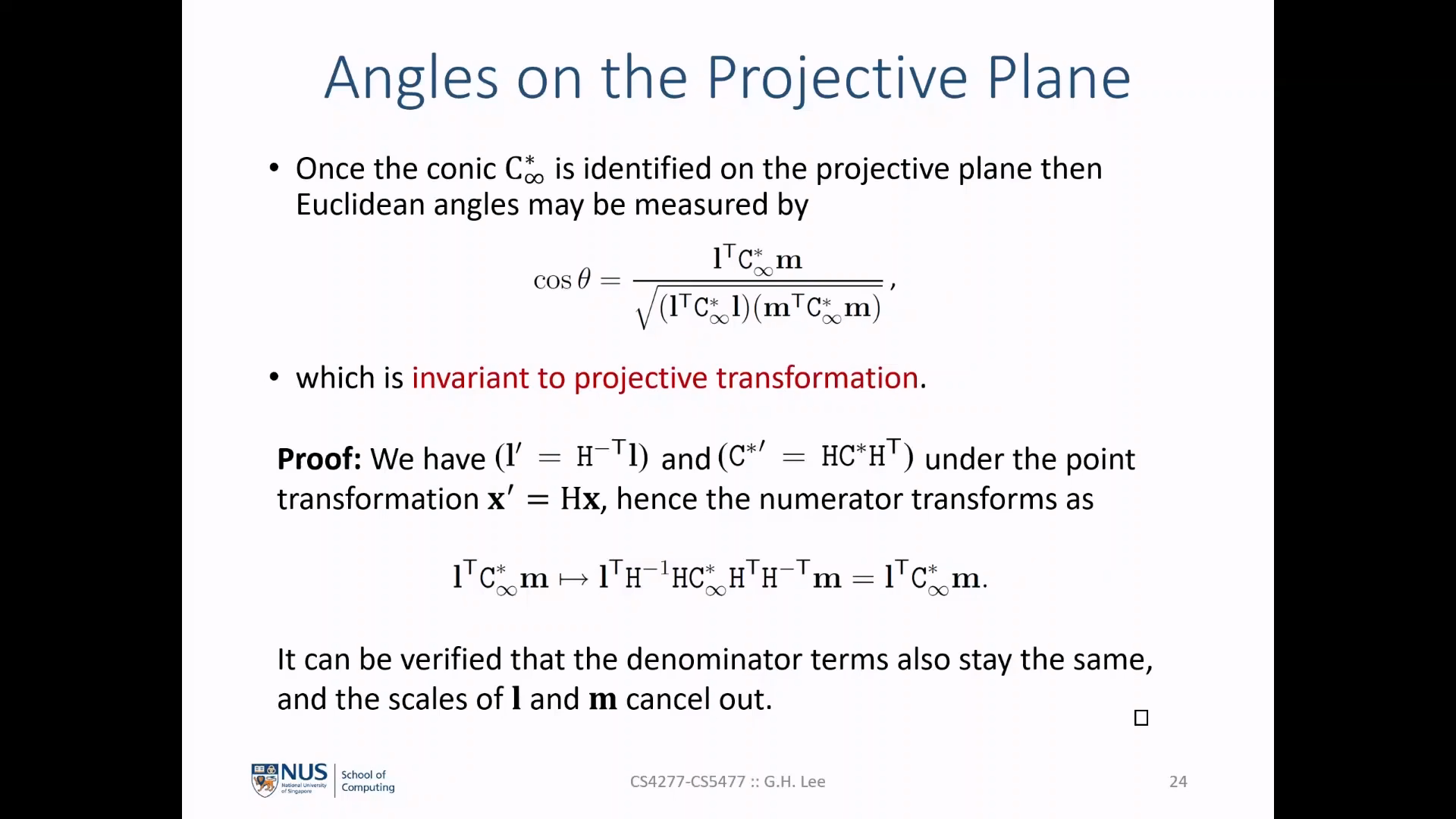
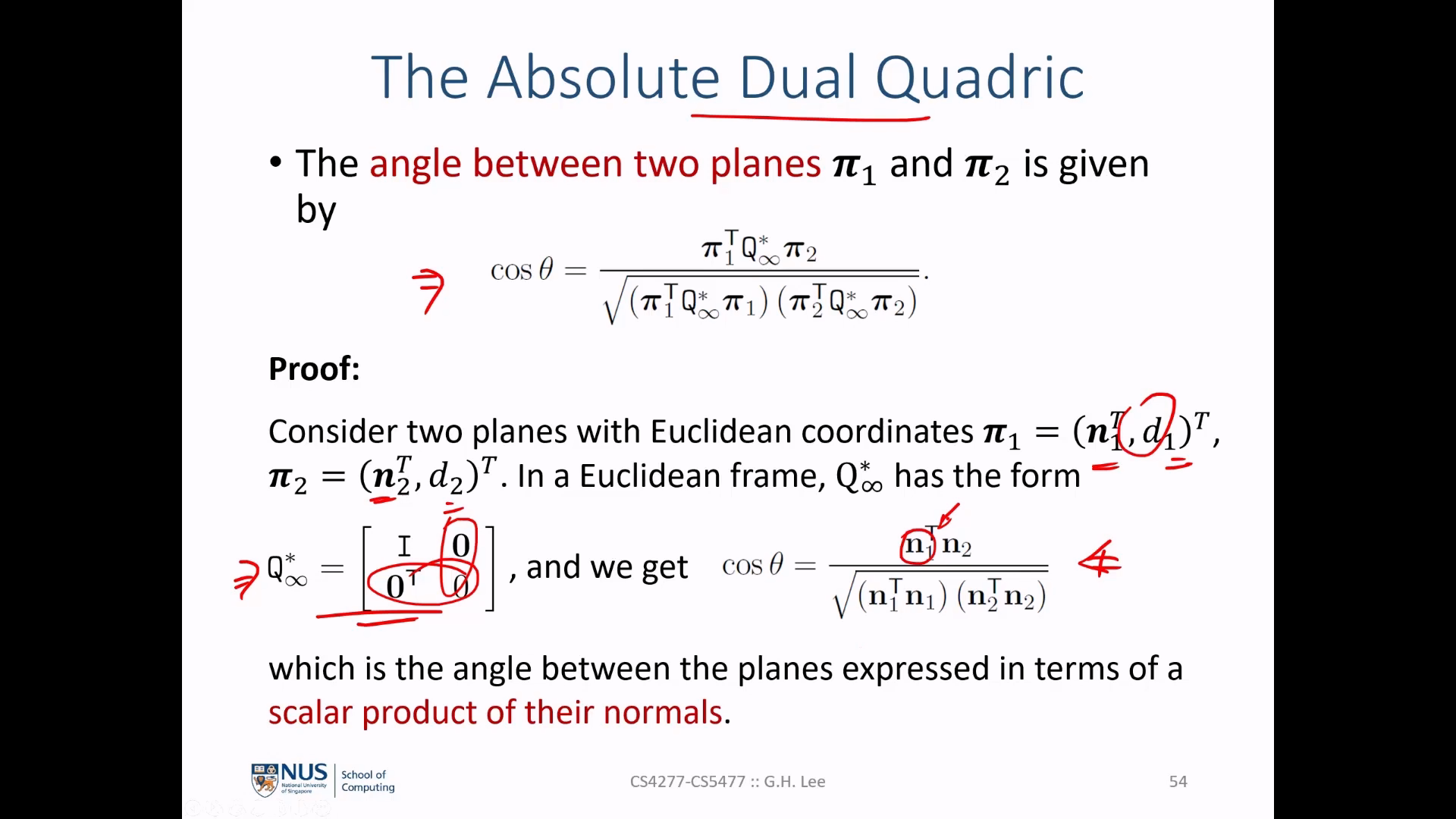
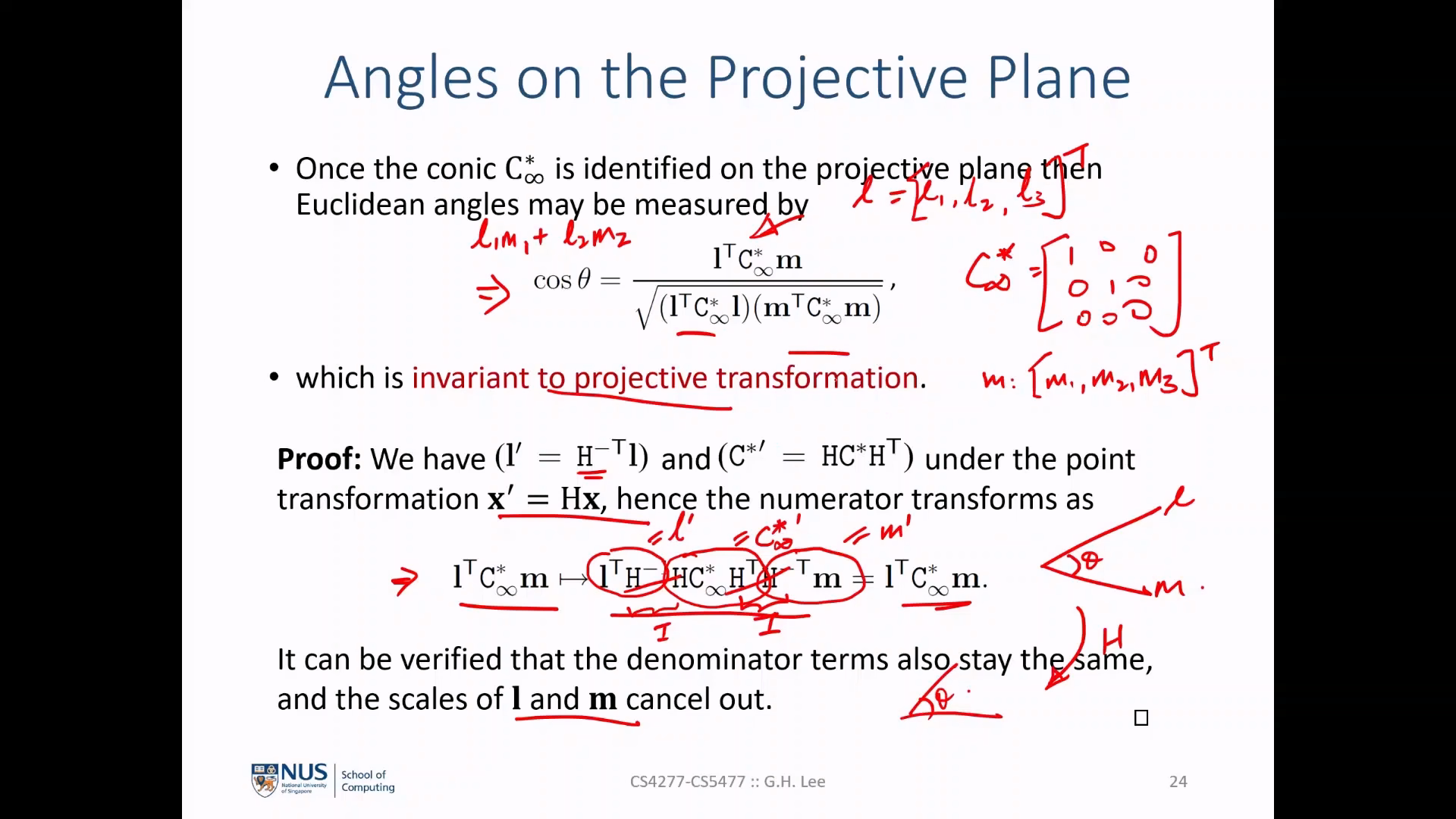
- 앞의 슬라이드와 유사한 수식 표현이 위 슬라이드에 나타나 있습니다. 위 슬라이드에서는 \(C^{*}_{\infty}\) 개념을 도입하여
projective transformation을 적용하더라도 사이 각을 구할 수 있는 방법을 제시합니다.
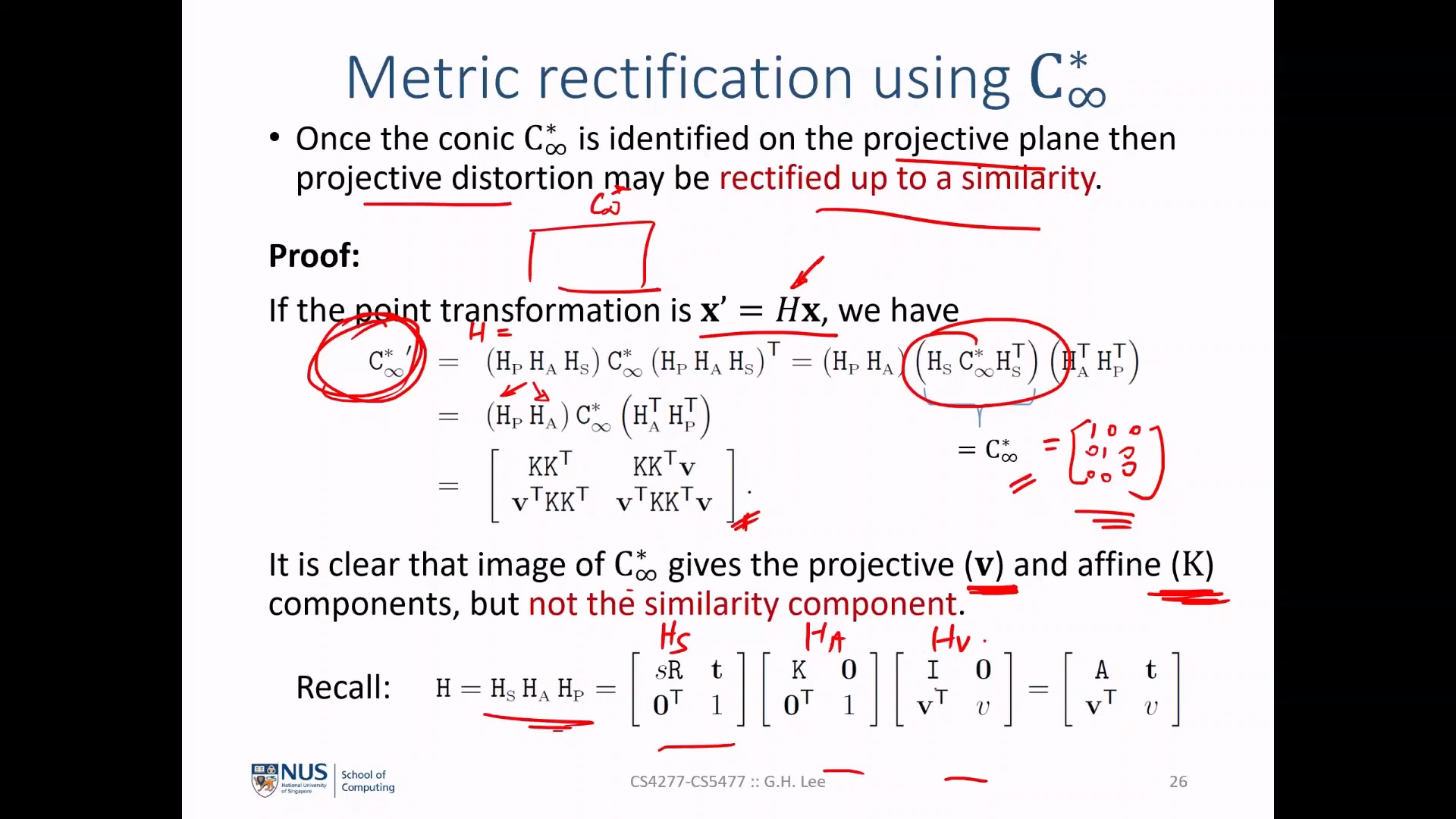
- \[H = H_{P}H_{A}H_{S} = \begin{bmatrix} I & 0 \\ v^{T} & 1 \end{bmatrix} \begin{bmatrix} K & 0 \\ 0^{T} & 1 \end{bmatrix} \begin{bmatrix} sR & t \\ 0^{T} & 1 \end{bmatrix}\]
- 강의에서는 제외되었지만 책에는 존재하는
conic의 추가 속성에 대하여 다루어 보도록 하겠습니다.
- 마지막으로 Circular points and Absolute conic 강의의 후반부 내용을 살펴보도록 하겠습니다.
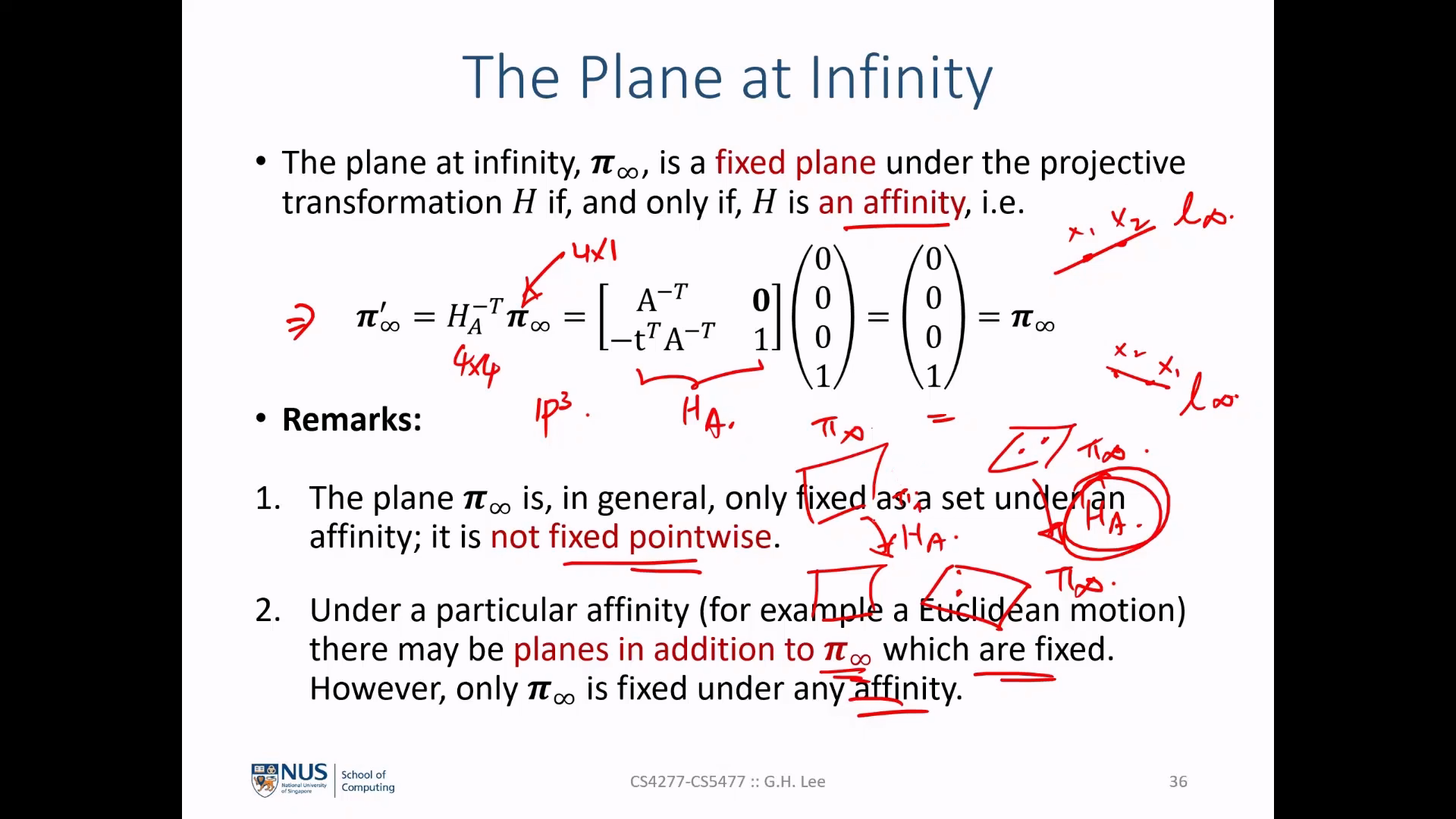
- 위 식에서 \(H_{A}\) 는 다음과 같이 블록으로 구성된 행렬로 정의 됩니다.
- \[H_{A} = \begin{bmatrix} A & t \\ 0^{T} & 1 \end{bmatrix}\]
- \[A \in \mathbb{R}^{3 \times 3}, \quad t \in \mathbb{R}^{3 \times 1}\]
- \[H_{A}^{-1} = \begin{bmatrix} B & b \\ c^{t} & d \end{bmatrix}\]
- \[H_{A}H_{A}^{-1} = I\]
- \[H_{A}H_{A}^{-1} = \begin{bmatrix} A & t \\ 0^{T} & 1 \end{bmatrix} \begin{bmatrix} B & b \\ c^{t} & d \end{bmatrix} = \begin{bmatrix} AB + tc^{T} & Ab + td \\ c^{T} & d \end{bmatrix} = \begin{bmatrix} I_{3} & 0 \\ 0^{T} & 1 \end{bmatrix}\]
- 따라서 다음 관계식을 만족합니다.
- \[\begin{cases} c^\top = 0^\top, \\ d = 1, \\ AB + t c^\top = AB = I_3 \;\Rightarrow\; B = A^{-1}, \\ Ab + t d = Ab + t = 0 \;\Rightarrow\; b = -A^{-1}t. \end{cases}\]
- \[\therefore H_{A}^{-1} = \begin{bmatrix} A^{-1} & -A^{-1}t \\ 0^{T} & 1 \end{bmatrix}\]
- \[(H_{A}^{-1})^{T} = \begin{bmatrix} (A^{-1})^{T} & 0 \\ (-A^{-1}t)^{T} & 1 \end{bmatrix} = \begin{bmatrix} A^{-T} & 0 \\ -t^{T}A^{-T} & 1 \end{bmatrix}\]
- 따라서 위 슬라이드의 \(H_{A}^{-T}\) 는 다음과 같이 정의 됩니다.
- \[\therefore H_{A}^{-T} = \begin{bmatrix} A^{-T} & 0 \\ -t^{T}A^{-T} & 1 \end{bmatrix}\]
- 이번에는
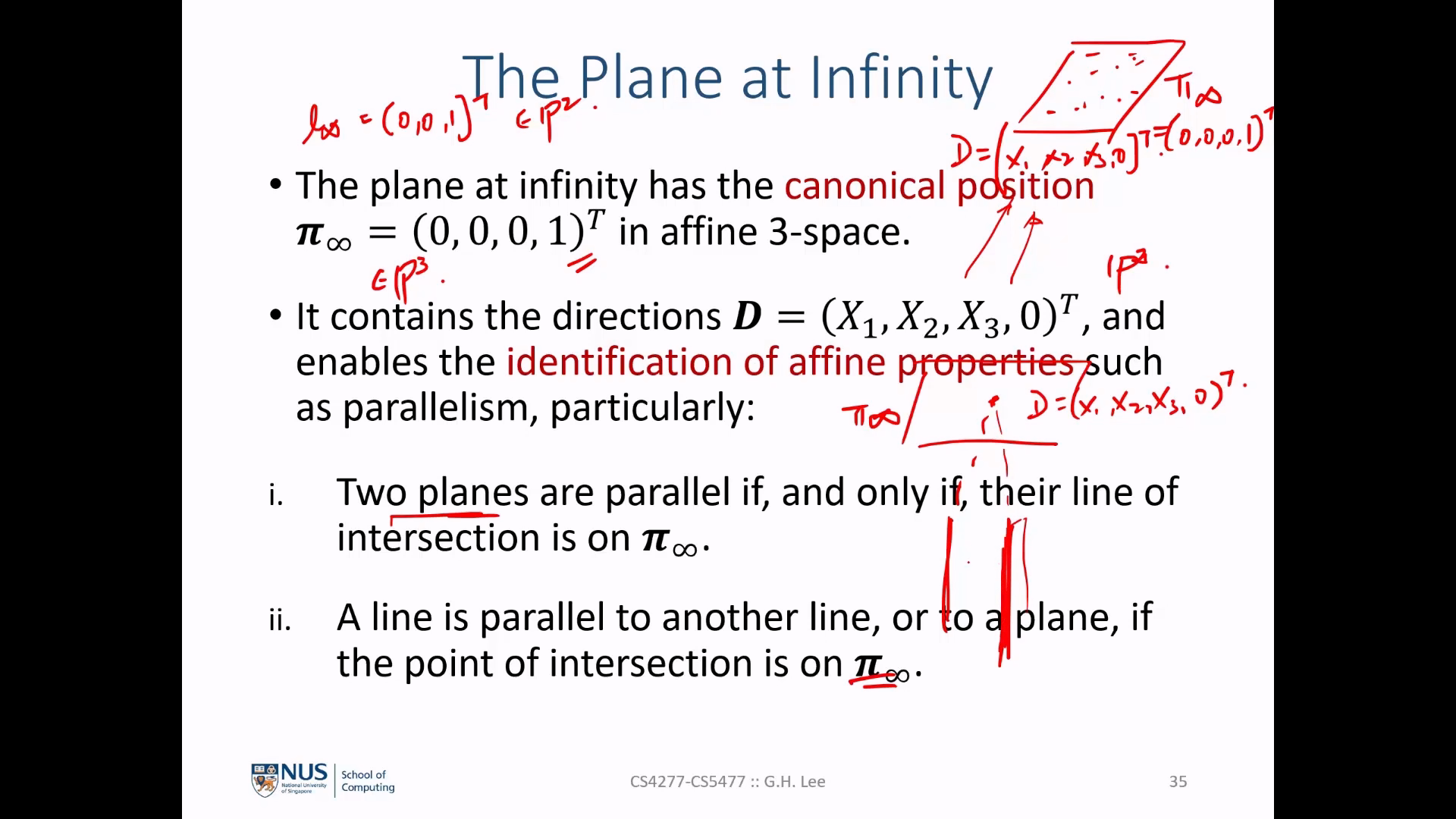
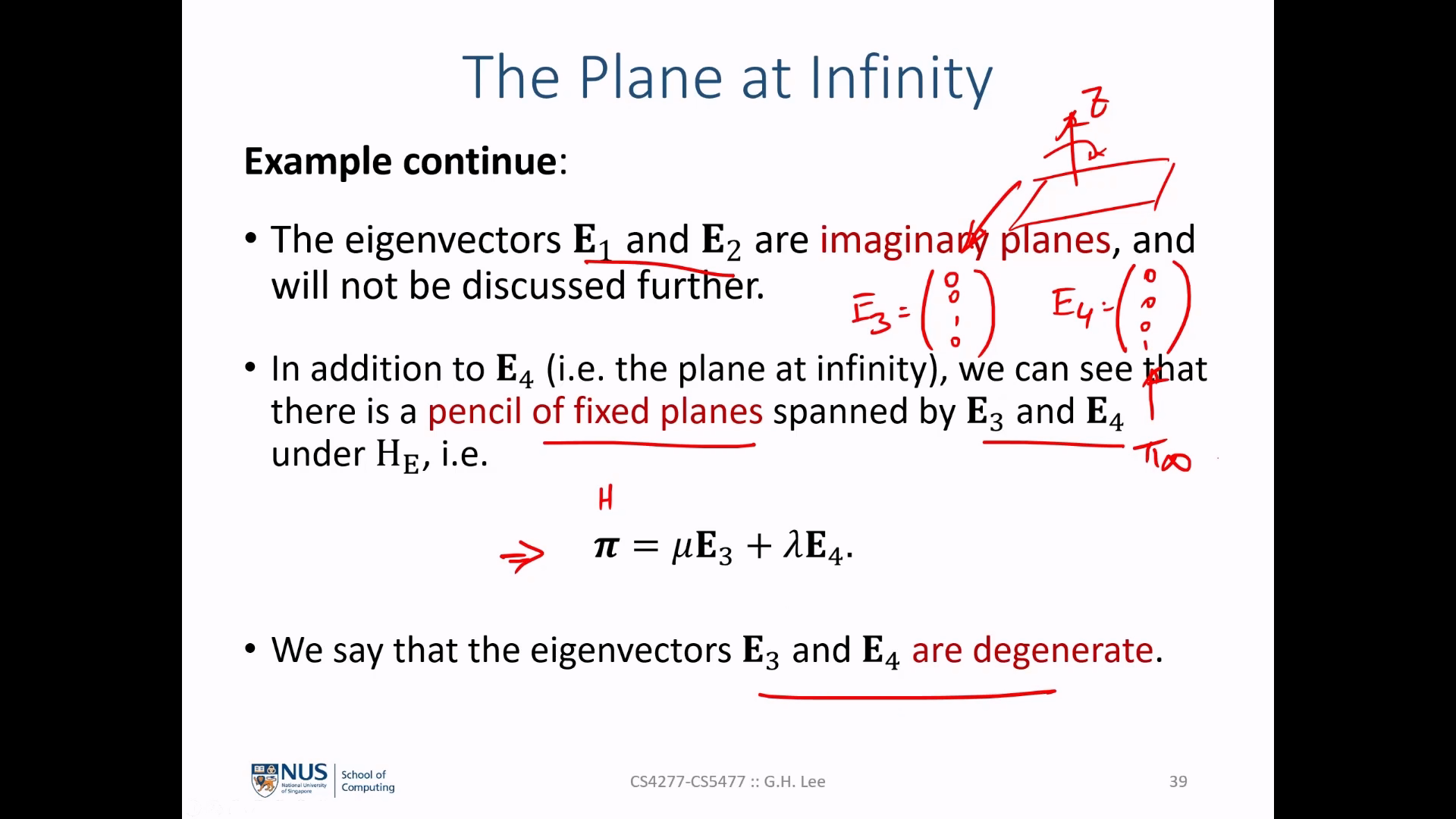
absolute conic이라는 개념에 대하여 다루어 보도록 하겠습니다. - 앞에서
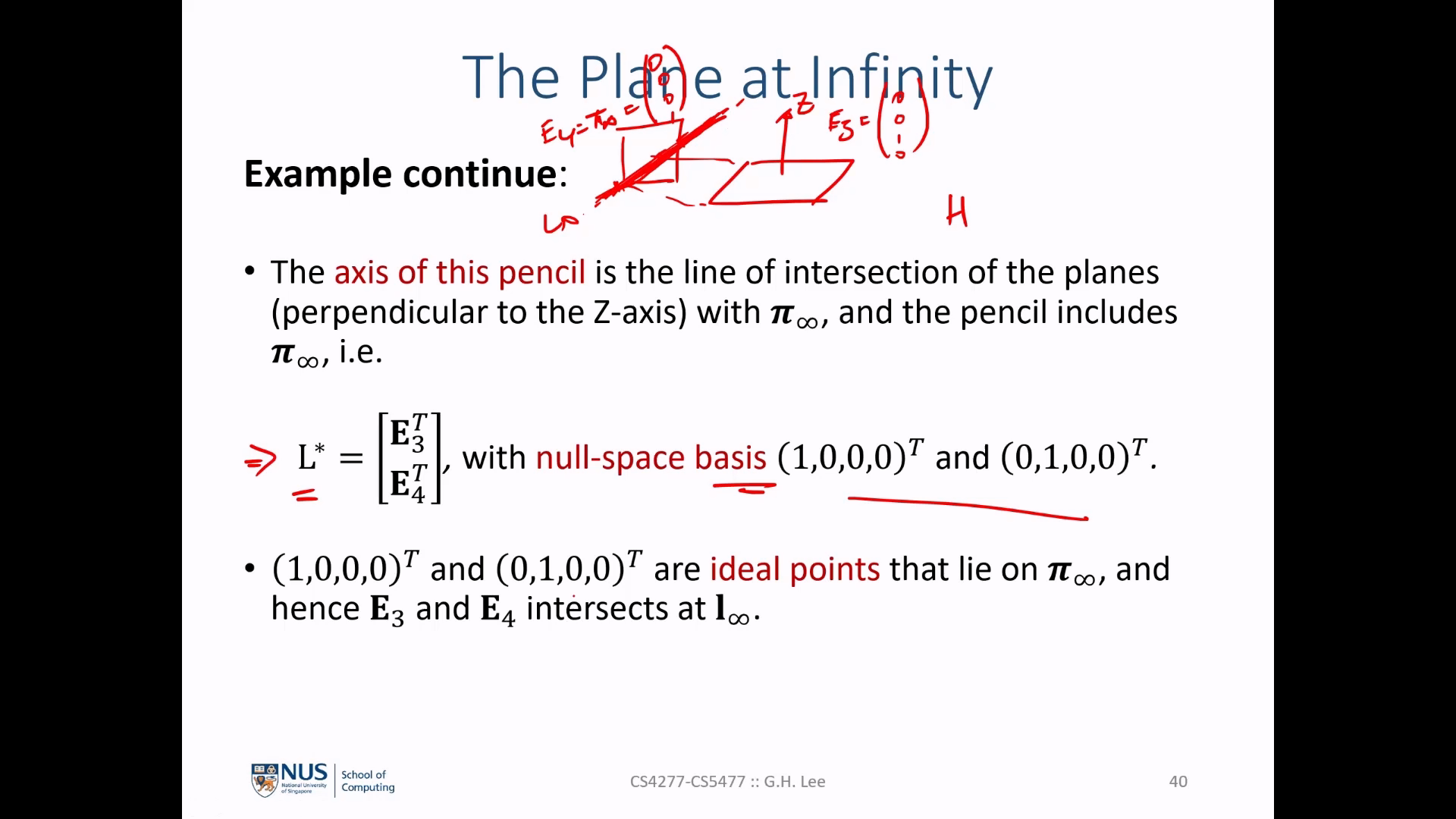
line at infinity와plane at infinity를 다룬 것 처럼conic의 경우에도infinity측면에서의 정의를 내릴 때absolute conic이라는 개념을 사용합니다. - 위 슬라이드에서 정의한 바와 같이
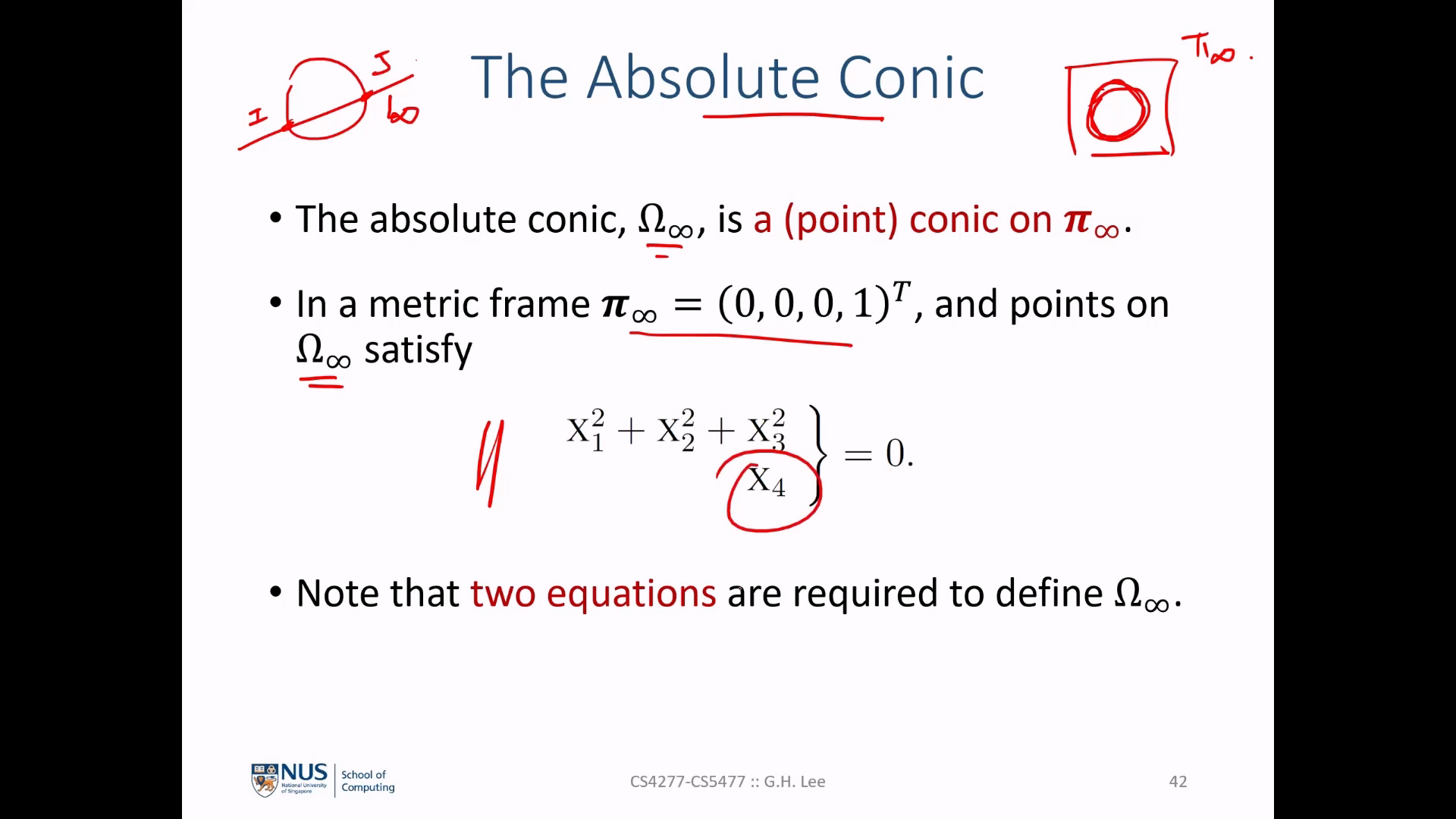
absolute coninc은 \(\Omega_{\infty}\) 기호를 통해 나타내며 \(\pi_{\infty}\) (plane at infinity) 상의(point) conic으로 정의 됩니다.
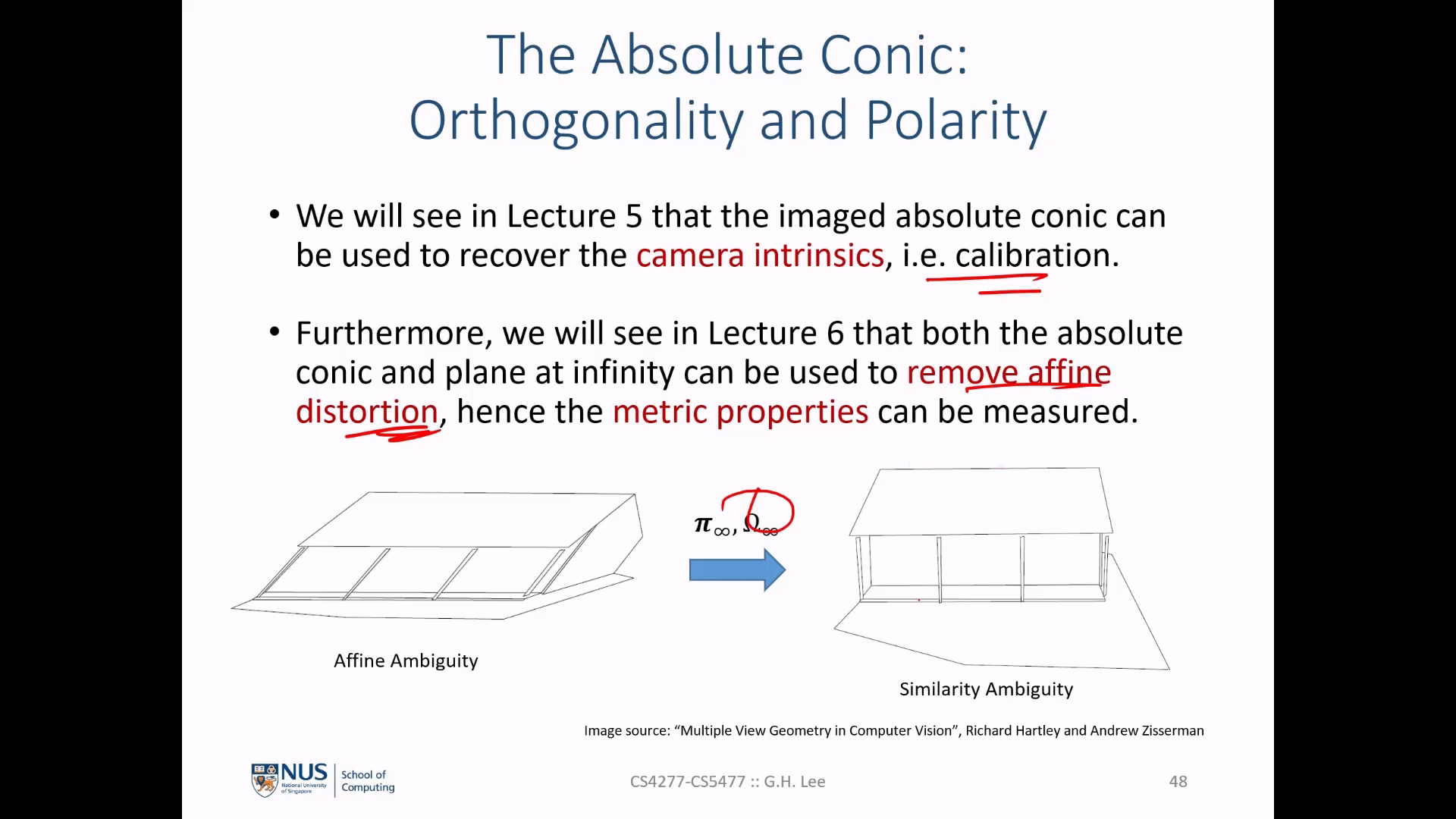
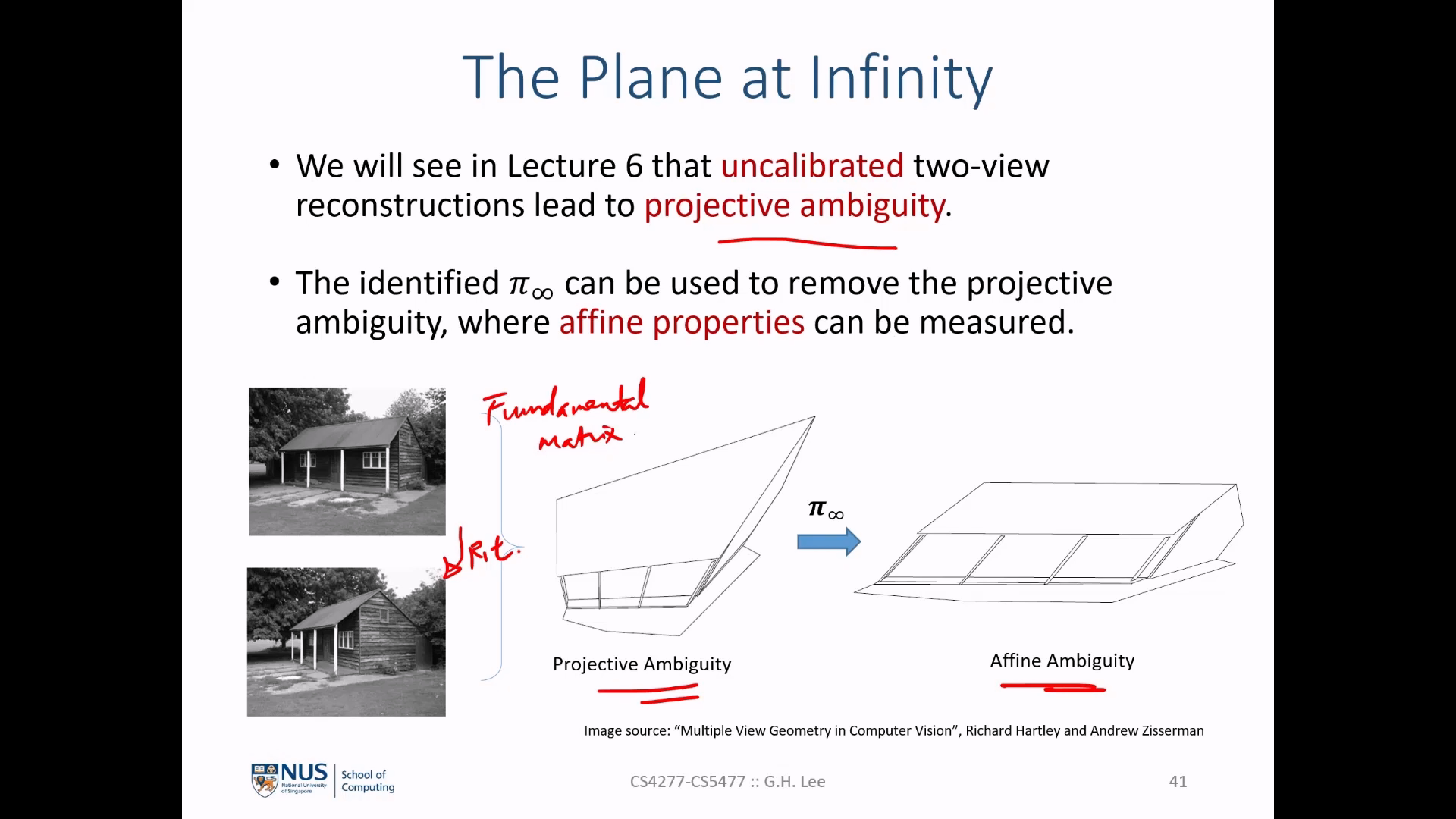
absolute conic의 개념을 배우기 전에 이 개념이 중요한 이유를 살펴보도록 하겠습니다.- Lecture 6. Single view metrology 에서 다룰 내용이지만
absolute coninc은 카메라의 위치에 상관 없이 카메라 파라미터intrinsic\(K\) 에만 영향을 받습니다. 따라서 \(K\) 만 정해지면 카메라의 위치 이동 (extrinsic)과 무관하게 이미지 내에서 얻을 수 있는 정보를 추출할 수 있습니다. - 예를 들어
point의 경우vanishing point,line의 경우vanishing line과 같은 특성이 있는데conic의 경우absolute conic이 이와 같은 개념에 해당합니다. - 따라서 카메라 위치에 변하지 않는 특성을 찾기 위해 ( \(K\) 에만 관련있는 )
absolute conic개념이 필요합니다.

absolute conic은 \(\pi_{\infty}\) 에 존재하는conic이고 카메라의 위치 이동에 상관 없이 고정값이 됩니다. 정확하지는 않지만 비유를 한다면 하늘에 있는 달이absolute conic이 될 수 있습니다. 왜냐하면 나의 위치가 변하더라도 달의 크기와 위치는 변하지 않고 고정이기 때문입니다. 달의 크기와 위치가 변하지 않고 고정인 이유는 내가 바라보는 달의 위치가 \(\pi_{\infty}\) 에 존재한다고 가정할 수 있기 때문입니다. (물론 비유한 것이지 달은 유한한 거리에 있습니다.)
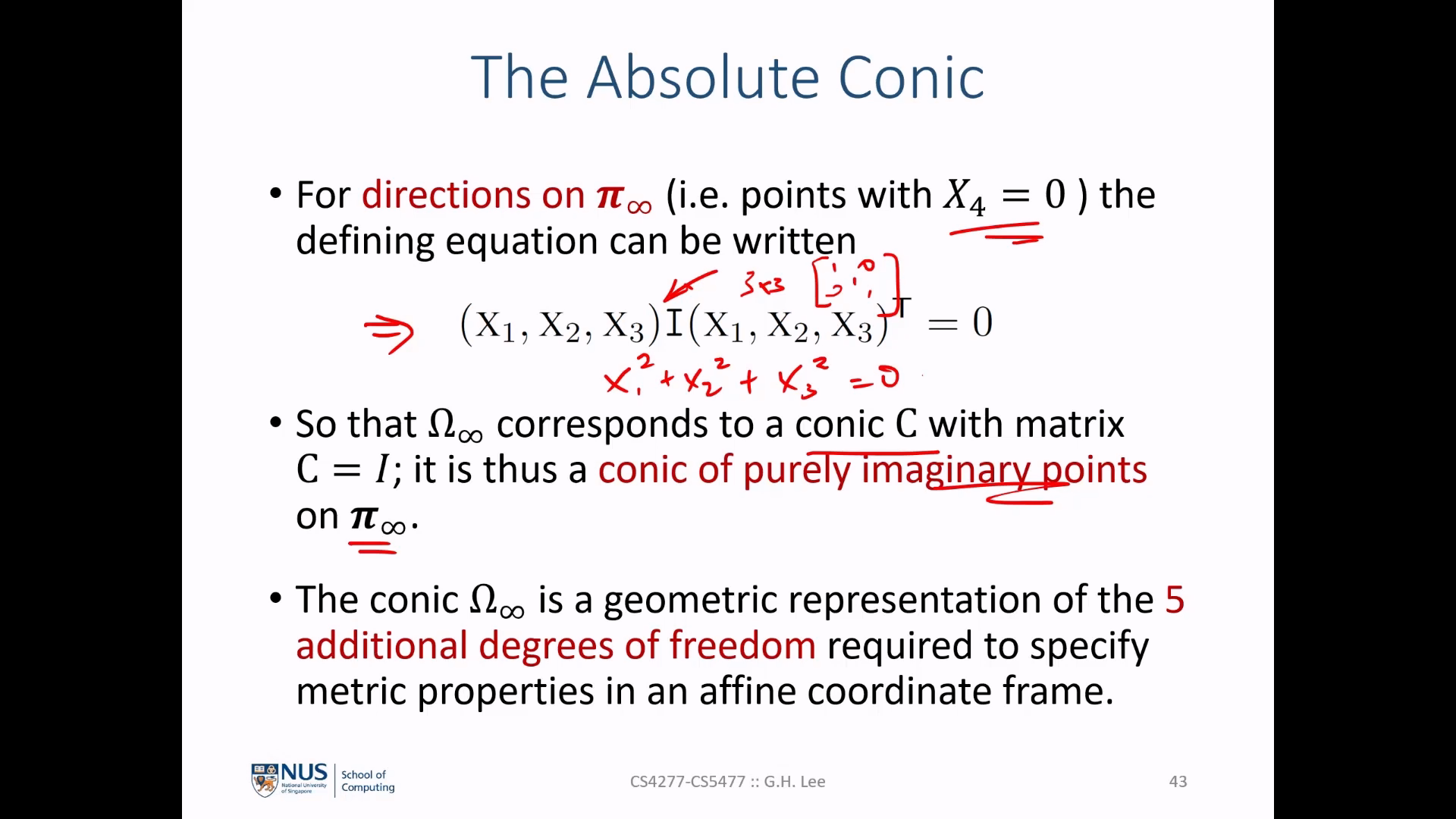
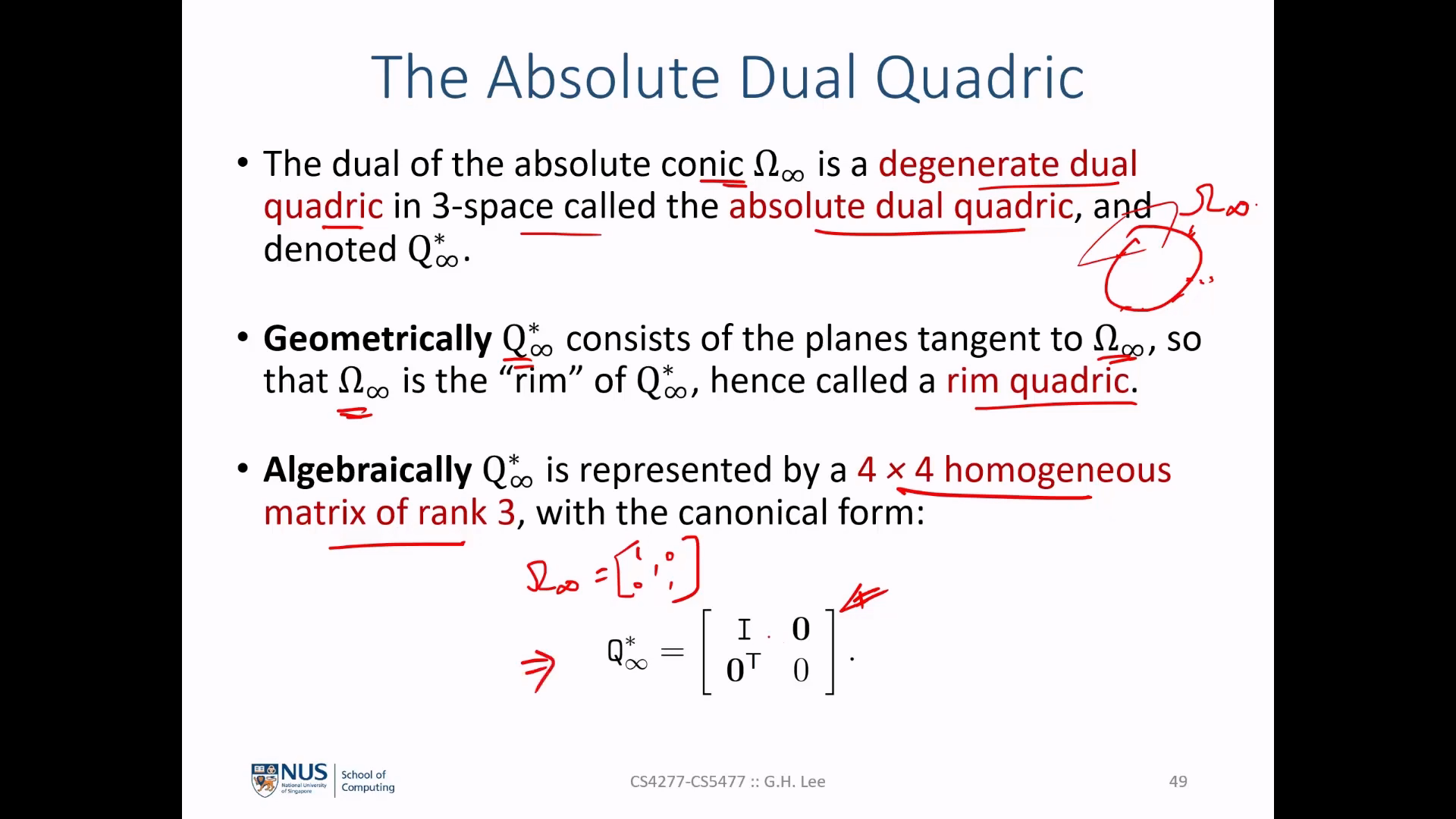
absolute conic또한conic의 한 종류 이므로 \(3 \times 3\) 크기의 행렬을 가집니다.absolue conic은 아래 2가지 정의에 따라 결론적으로 항등 행렬 \(I\) 와 같은 형태가 됩니다.
- \[X_{1}^{2} + X_{2}^{2} + X_{3}^{2} = 0\]
- \[X_{4} = 0\]
- 위 조건의 이유와
absolute conic이 \(I\) 형태인 이유를 앞에서 배운circular points와 비교해서 설명하겠습니다.
circular points:line at infinity가 통과하는circle에서 생기는 점absolute conic:plane at infinity에서sphere가 만나서 생기는 선
- 먼저 앞에서 다룬
circular points정의를 다시 정리하여 나열해 보겠습니다.
- \[x_{1}^{2} + x_{2}^{2} = 0\]
- \[x_{3} = 0\]
circular points에서 \(x_{1}^{2} + x_{2}^{2} = 0\) 를 만족해야 하는 이유는 \(x_{3} = 0\) 이기 때문에conic을 표현하는 2차식에서 \(x_{3}\) 가 사용된 항은 모두 소거되기 때문이고 \(x_{1}^{2}, x_{2}^{2}\) 의 계수가 1인 이유는circle을 가정했기 때문입니다.- 따라서
circular points를 정의하는 행렬은 다음과 같습니다. \((x_{1}, x_{2}, x_{3})\) 는homogeneous에서의point를 의미합니다.
- \[\begin{bmatrix} x_{1} & x_{2} & x_{3} \end{bmatrix} C \begin{bmatrix} x_{1} \\ x_{2} \\ x_{3} \end{bmatrix} = 0\]
- \[\Rightarrow x_{1}^{2} + x_{2}^{2} = 0\]
- \[\therefore C = \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 0 \end{bmatrix}\]
- 따라서 \(C\) 가 위 식과 같이 정의될 때 \(x_{1}^{2} + x_{2}^{2} = 0\), \(x_{3} = 0\) 을 만족하는 \((x_{1}, x_{2}, x_{3})\) 는
circle상에 있음을 알 수 있습니다.
- 이번에는
absolute conic의 정의에 대하여 유사한 방식으로 나열해 보겠습니다.absolute conic은circular points에 비해 차원이 하나 추가된 것으로 이해하면 쉽게 이해할 수 있습니다.
- \[x_{1}^{2} + x_{2}^{2} + x_{3}^{2} = 0\]
- \[x_{4} = 0\]
absolute coninc에서 \(x_{1}^{2} + x_{2}^{2} + x_{3}^{2} = 0\) 를 만족해야 하는 이유는 \(x_{4} = 0\) 이기 때문에conic을 표현하는 2차식에서 \(x_{4}\) 가 사용된 항은 모두 소거되기 때문이고 \(x_{1}^{2}, x_{2}^{2}, x_{3}^{2}\) 의 계수가 1인 이유는sphere를 가정했기 때문입니다.- 따라서
absolute coninc를 정의하는 행렬은 다음과 같습니다. \((x_{1}, x_{2}, x_{3})\) 는homogeneous에서의point를 의미합니다.
- \[\begin{bmatrix} x_{1} & x_{2} & x_{3} \end{bmatrix} C \begin{bmatrix} x_{1} \\ x_{2} \\ x_{3} \end{bmatrix} = 0\]
- \[\Rightarrow x_{1}^{2} + x_{2}^{2} + x_{3}^{2} = 0\]
- \[\therefore C = \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix}\]
- 따라서 \(C\) 가 위 식과 같이 정의될 때 \(x_{1}^{2} + x_{2}^{2} + x_{3}^{2} = 0\), \(x_{4} = 0\) 을 만족하는 \((x_{1}, x_{2}, x_{3})\) 는
absolute conic상에 있음을 알 수 있습니다.